 電機控制上的刷通
電機控制上的刷通
大功率電動運動控制的最新進展以及將混合動力電動驅動引入戰斗車輛可以說應該在戰鬥機的反應速度,減少工作量,可靠性和顯著功率密度的10項技術中名列前茅。
地面戰車中的嵌入式技術通常被認為是傳感器和武器以及直接協助指揮官和機組人員完成任務的命令,控制和通信子系統。然而,除了這些備受矚目的計算密集型技術之外,現代戰車是一種非常復雜的機器,具有大量電機驅動的部件,例如炮塔,槍,艙口,風扇,泵,彈藥處理等。大功率電動運動控制的最新進展以及將混合動力電動驅動引入戰斗車輛可以說應該在戰鬥機的反應速度,減少工作量,可靠性和顯著功率密度的10項技術中名列前茅。
當今的大多數戰車都使用液壓系統來驅動其機械系統。液壓系統通常在 3,000 至 5,000 psi 的壓力下運行,容易泄漏,難以維修和維護。此外,與未來將要取代它們的最新一代電機驅動子系統相比,液壓泵,管道和執行器笨重而笨重。無論要執行的功能是簡單的單軸操作(例如關閉艙口)還是更復雜的自動裝載機移動序列,所有閉環伺服系統都具有共同的控制要求,以改變扭矩,加速度,速度和位置,以實現其特定功能。這種伺服系統使用控制器/放大器將高壓直流(高達610 V)調制到一個或多個電機以產生所需的運動。控制器將具有許多輸入,例如模擬,旋轉變壓器或編碼器,以感測位置或速度以閉環。
現代戰車具有集成的電子學架構,支持駕駛和控制它們所需的所有功能。基于冗余以太網或 CANbus 架構,總線 vetronics 系統節省了大量必要的離散點對點布線。從外部照明到操縱車輛或旋轉炮塔的所有功能都將通過 vetronics 總線作為一系列命令傳輸到與要執行的功能相鄰的遠程控制器。與其他車輛功能一樣,電機控制器通過電子總線接收其命令。它們通常作為生產線可替換單元(RRU)實現,除了處理后臺診斷和本地錯誤檢測外,還具有相當多的智能來執行命令的伺服功能。
控制器有一系列類型,從一個 LRU 控制從一個到多個運動軸。對于自動裝填機等復雜設備,通過vetronics總線接收的命令將編排來自許多電機的一系列受控運動,例如,從分配器中選擇所需的彈藥類型,將其武裝起來,將其移動到位,然后將其裝載準備射擊。為了實現這種復雜程度,一些控制器是可編程的,它們在開發過程中使用建模和仿真工具(如 MATLAB 和 Simulink)創建其特定的功能集。
在地面戰車中,這些機械部件通常又大又重,需要大量的動力才能準確安全地移動和定位它們。由于車輛重量和尺寸是如此重要的參數,因此必須根據伺服系統的重量和物理尺寸來權衡移動重型部件的功率需求。控制器是一個關鍵元件,持續開發的目標是減輕控制器和電機的重量,功率和尺寸。這些努力的成功可以從表1中判斷,該表比較了典型電機控制器與傳導冷卻VMEbus電源模塊的物理尺寸和功率輸出。
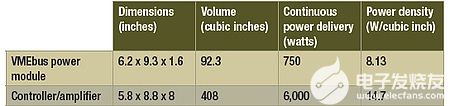
這種功率密度水平超過了傳統空氣或傳導冷卻技術的容量,既需要對LRU及其組件進行嚴格的熱設計,也需要采用液體冷卻。這種冷卻形式用于柯蒂斯-賴特控制嵌入式計算(CWCEC)生產的一系列電機控制器。
對機械運動的精確控制可能不像協作的、聯網的命令和控制系統或合成孔徑雷達處理器的多個計算節點那樣迷人,但電機控制確實將其設計者和技術發揮到了極致。由于緊湊型電機控制器的這種發展,現代戰車的尺寸和重量將繼續減少。這將使它們成為更有效的平臺,攜帶更多的部隊有效載荷,指揮和控制系統,傳感器,武器和自我保護系統。
審核編輯:郭婷
-
傳感器
+關注
關注
2551文章
51177瀏覽量
754286 -
控制器
+關注
關注
112文章
16385瀏覽量
178384 -
電機控制
+關注
關注
3536文章
1880瀏覽量
268906
發布評論請先 登錄
相關推薦
無刷直流電機驅動方案控制板設計以及相關產品應用
有刷直流電機是什么?有刷直流電機的工作原理是什么?

用于驅動無刷和有刷電機的新型 2 A 峰值電流嵌入式電機控制器

無刷電機和有刷電機是什么意思
空心杯電機是有刷還是無刷好
無刷直流電機矢量控制技術詳解
永磁無刷直流電機的控制方法
用STM32控制步進電機與無刷直流電機的區別是什么?
基于CW32的無刷直流空心杯電機無感方波控制驅動方案






 工商網監
工商網監
評論