 先進的圖像處理使無人機能夠發揮其潛力
先進的圖像處理使無人機能夠發揮其潛力
實時圖像處理硬件具有巨大的潛力,可以有效和實際地解決自治系統當前面臨的許多問題。最近一項關于自主機載加油的試驗表明,將圖像處理應用于一個極具挑戰性的問題具有潛力,并取得了巨大的成功。
無人機(UAV)吸引世界各地軍事組織如此多的興趣和投資的原因有很多。通過不危及飛行員的生命,他們可以飛行那些被認為太危險的任務。真正的自主性 - 許多無人機研究的目標 - 可以全面減少人員。任務長度可能不是飛行員疲勞的函數,這一事實非常有吸引力。
然而,在太陽能成為可行的替代方案之前,任務長度不僅受到飛行員相關因素的影響,而且還受到加油需求的影響。理想的無人機將永遠不需要返回基地加油,這一要求一直是對機上加油進行大量研究的核心。
GPS技術的潛力已經花費了大量的開發工作,使加油機和接收器無人機能夠在彼此足夠近的距離內移動,以便將燃料探頭對接到無人機上。然而,所需的精度程度 - 特別是因為任何一艘飛行器都容易受到湍流等干擾因素的影響 - 處于GPS精度的外部極限。需要開發一種替代技術 - 使用先進的圖像跟蹤和圖像處理系統 - 以補充GPS系統,以實現復雜,高度復雜的機動(圖1)。
圖 1
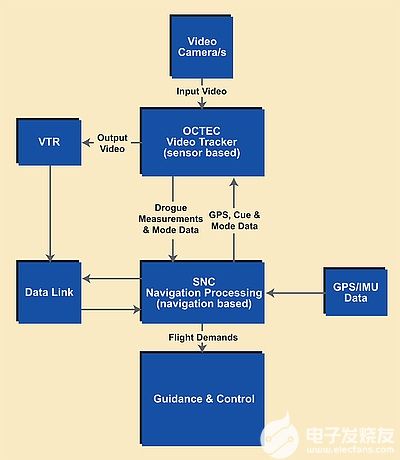
評估該替代方案是由國防高級研究計劃局(DARPA)和內華達山脈公司(SNC)開發的聯合項目先進機載加油示范(AARD)的目標。這項共同努力產生了自主探測和無人機空中加油的首次成功演示,并在NASA德萊頓飛行研究中心進行。
DARPA和SNC決定在演示中使用探頭和干燥(或軟管和機器人)加油方法,因為它被廣泛認為是最難自動化的 - 這是軟管的靈活性及其對空氣動力學干擾的敏感性的函數。Octec(現在是GE發那科智能平臺的一部分)和內華達山脈公司合作開發和提供圖像捕獲和處理功能,這些功能是演示成功的核心。
挑戰
在項目開始時,必須執行許多關鍵研究,例如確定圖像跟蹤設備的最佳視點位置和確定理想視場等,這些研究是相互關聯的。
這些研究包括對替代圖像捕獲方法的評估。眾所周知,無論選擇哪種技術,都要求在100英尺的范圍內提供約36英寸的范圍測量精度,以確定探頭和光暈的相對位置,在12英尺的范圍內接近4英寸的精度,以允許探頭插入。
在選擇圖像捕獲設備和用于傳輸捕獲的圖像數據以進行處理的介質時,關鍵考慮因素包括:
捕獲圖像的分辨率
設備的堅固性
尺寸和重量
傳輸介質對電磁干擾 (EMI) 的敏感性,預計在射頻豐富的環境中會出現電磁干擾 (EMI)
確定高分辨率數字傳感器將是理想的解決方案;然而,由于定制跟蹤器硬件以滿足傳感器的數字接口標準所需的任何開發時間,因此無法采用它。雖然高密度光纖傳輸線被認為可以提供最佳的EMI抗干擾能力,但測試表明,它的圖像分辨率非常差,以至于跟蹤器無法在擴展的30米范圍內檢測到幾像素的物體。光纖電纜也遭受了相對大量的壞點/光纖。
最后,發現標準NTSC攝像機可以提供足夠的圖像分辨率,以在30米的范圍內分辨流浪漢和籃筐。選擇了相機的“遙控頭”版本,以最大限度地減少所選安裝點的尺寸和重量影響。顯示,相關的傳輸電纜具有可接受的EMI電阻,并且視頻質量沒有顯示出任何明顯的圖像干擾偽像。
評估其他傳感器安裝位置
盡管該應用程序最終適用于完全無人平臺 - 加油加油機和無人機 - 但演示是使用載人NASA F-18飛行研究飛機進行的(如圖所示,文章的第一頁)。F-18上遠程傳感器的四個最佳位置由NASA機組人員確定,但所需飛行剖面和視點的建模和模擬將選擇限制在兩個。平視顯示器(HUD)視圖為流浪漢提供了接近操作范圍,并提供了流氓在視野內的最大可能性。從舷內右塔架的視野在終端階段提供了良好的軌跡可見性,并且具有作為現有相機位置的優勢。然而,這兩個安裝點也有缺點,需要考慮。
這些缺點在很大程度上是由于跟蹤算法在drog目標上至少需要幾個像素才能識別和跟蹤;這與NTSC傳感器的分辨率相結合,決定了最大視場(FOV)為55?∞。太狹隘的視角會使獲取機器人變得更加困難,并且還會在機器人靠近時引起問題,從而填滿整個視野。在事件中,最佳視場被確定為55?∞。
出于演示的目的,主要使用兩個攝像頭位置來評估其有效性。然而,在無人機環境中部署圖像處理硬件只需要一個攝像頭,從而最大限度地減少了重量和功耗,并避免了在機身上的多個位置安裝兩個或多個攝像頭傳感器所帶來的進一步復雜性。這是可能的,因為在創建能夠準確估計單個相機范圍的算法方面進行了大量的開發工作。
在開發算法方面也做出了規定,以消除可能在捕獲的圖像中被錯誤識別的背景混亂。例如,在某些照明條件下,一些飛機結構,如發動機排氣噴嘴和燃油軟管出口孔,在很遠的距離上看起來非常像droge。油輪后面應避開的區域-稱為“回避量”-是通過模擬確定的。
準確識別滾輪相對于軟管的位置和距離的另一個挑戰來自試驗視頻分析。這表明,行車外緣的不穩定性使其成為一個不合適的參考點。然而,發現droge的實心內輪轂表現出穩定的高對比度,使傳感器相對容易識別并提供實用的校準參考點。
從單個相機開始測量范圍
為開發適當的范圍估計算法付出了巨大的努力,并提出了兩個。一種是基于經典的質心方法;另一種是基于模型的方法。這些算法在 MATLAB 中實現,并針對模擬模型進行了測試。
確定每種算法都有互補的優點和缺點。基于質心的方法由于測量圖像像素中的區域而提供了出色的分辨率,而基于模型的方法通過將觀察到的視頻模式與已知參考進行比較,更穩定,更準確。
圖3a和3b顯示了每種算法根據視頻序列中每個圖像場的已知真實范圍報告的估計值。正如預期的那樣,基于模型的方法在更遠的范圍內比基于質心的方法更嘈雜;然而,基于質心的算法在精確測量的能力上受到增益和失調偏差的影響。
圖 3
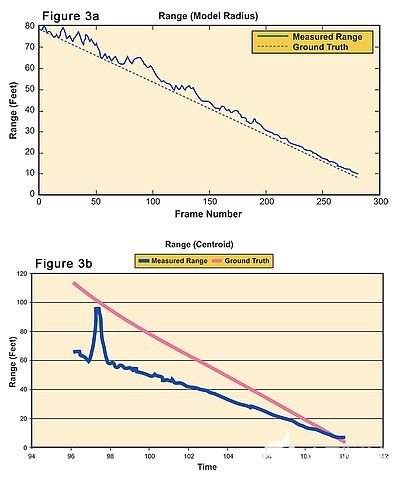
決定實現并行運行的兩種算法。這導致測量精度在大約3米的范圍內優于10厘米。期望的精度最初被指定為1西格瑪(即68%的時間)標準差;獲得的精度主要更好(也就是說,它在大約90%的時間內在給定范圍內 - 幾乎是2西格瑪標準偏差)。
自動機載加油演示的核心是Octec的基于ADEPT-60傳感器的視頻跟蹤和圖像處理模塊。它本身配備了多種圖像處理算法,并進行了擴展,以便能夠將新開發的算法的測量結果組合在一起。這提供了靈活性,可以選擇性地估計范圍,而無需基礎算法之間的直接交互。
當droge靠近加油機時,它所占據的視野比例越來越大 - 從距離30米的幾個像素到對接階段視野的一半以上 - 導致需要修改跟蹤算法以在內存中包含目標的可調整大小的圖像模板, 這是使用估計的機器人大小動態更新的。模板圖像還用作在間歇性軌跡丟失時重新獲取 drogue 的第一階段機制。
如前所述,為圖像傳感器選擇的安裝點并非沒有缺點。其中最重要的是擔心HUD駕駛艙窗口會引起明顯的圖像失真。這個問題通過使用飛機和機庫周圍各種3D點的“真實世界”測量來校準系統,并通過圖像捕獲傳感器跟蹤這些相同的點來解決。在MATLAB中編寫了一個優化例程來對相機和鏡頭參數進行建模,并且通過模型重新投影已知的3D點,并與視覺系統測量的點進行比較。這允許修改處理算法以補償相機視野中的異常。
下一階段
該演示證明,可以實現應用先進的基于視覺的傳感器進行圖像捕獲和最先進的圖像處理技術,以增強復雜的基于GPS的定位系統的現有功能。但是,最大限度地提高該技術的可行性和可部署性的工作仍在繼續。可以提高獲取目標圖像的整體性能。操作范圍 - 可以捕獲機器人的初始距離 - 也可以擴展,從而減少對基于GPS的非常精確的測量的依賴。最后,將開展工作以實現機器人類型識別,識別異常的機器人行為以及照明和天氣條件的影響。
審核編輯:郭婷
-
接收器
+關注
關注
14文章
2468瀏覽量
71880 -
gps
+關注
關注
22文章
2895瀏覽量
166198 -
無人機
+關注
關注
229文章
10422瀏覽量
180192
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論