 合成孔徑雷達系統用于GP-GPU支持的輕型無人機
合成孔徑雷達系統用于GP-GPU支持的輕型無人機
有人駕駛和無人駕駛飛機系統設計人員使用合成孔徑雷達(SAR)來繪制地形圖并對其進行成像。SAR還可以作為監視設備來跟蹤和識別移動物體。SAR技術在無人機(UAV)中的應用潛力巨大,但獲取高分辨率可操作數據所需的超級計算機處理水平的數量和大小限制了飛機可以有效利用SAR進行地形測繪的高度和速度。因此,來自高速數據鏈路的雷達數據必須由地面上的大型計算機集群進行后處理,從而導致向作戰人員實時提供圖像和可操作情報的非實時。
輕型SAR在小型無人機中的巨大潛力受到與前幾代硅技術相關的尺寸,重量和功率(SWaP)限制的阻礙。現在,SAR 可以使用基于高級 COTS 通用圖形處理器單元 (GP-GPU) 處理器(如 NVIDIA 的費米架構設備)的高性能嵌入式計算 (HPEC) 架構進行部署,并具有復雜的加固和熱管理封裝技術。這些新的HPEC架構消除了早期的性能和熱管理障礙,從而能夠在無人機上最佳地使用SAR技術。GP-GPU具有大量內核,浮動數學功能和令人印象深刻的計算性能,將簡化和加速SAR技術與當今小型無人機的集成,并為作戰人員提供實時可操作數據。通過調整系統架構,堅固耐用的COTS GP-GPU可以將傳統SAR系統的處理能力提高4到80倍。

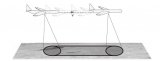
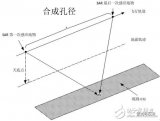
圖1:SAR系統
SAR通過組合系統掃描和捕獲的地形圖像,使飛機的雷達能夠作為一個非常大的陣列發揮作用。這種技術有效地利用飛機的運動來擴大雷達孔徑。SAR拓撲圖像需要超級計算系統提供的大量處理能力。問題是,到目前為止,在飛機上使用SAR監視限制了飛機的速度。對于所需數據至關重要且旨在用于實時操作的情況尤其如此。
在飛機上部署超級計算機功能,特別是空間和重量受限的無人機,需要平衡SWaP、系統能力和可操作情報的及時性。啟用或限制 SAR 數據的可操作實時使用的關鍵因素是視場、數據丟失或分辨率丟失以及對事件的延遲感知。優化 SAR 性能以進行實時使用的能力與可用的計算能力成正比。在無人機中,SAR通常部署在SWaP優化的HPEC集群上,該集群由與低延遲,高速和高帶寬網絡互連的堅固處理器組成。

圖 2:SAR 框圖
雖然如何將雷達數據轉換為圖像的方法超出了本文的范圍,但對SAR算法的一個方面的描述有助于解釋GP-GPU如何提高SAR性能。SAR 算法的關鍵部分由三個主要階段組成:行維中的 FDC(頻域卷積)、轉角和列維中的 FDC。

圖3:拐角轉彎
執行此SAR算法的傳統技術是將數據流式傳輸到HPEC系統。該系統的架構是將 HPEC 系統分段,以便一組處理器負責計算傳感器數據的一行或多行的 FDC。然后,行 FDC 數據的計算結果使用轉角(數據集的行變為列式)發送到下一組處理器,然后由該處理器處理列的 FDC。

圖 4:傳統的高壓滅菌器 SAR
在某些情況下,FDC將主要由快速傅里葉變換(FFT)組成。FFT是將數據從內存移動到處理器,執行計算,然后將結果發送到內存以用于另一個后續計算的功能。這意味著,從本質上講,SAR 算法的性能直接取決于數據移動的優化。
在 SAR 系統中,算法通常分為內循環和外循環。使用內部循環,數據在處理器內存(高速緩存或 DRAM 存儲器)中處理。使用外部循環,數據被傳輸到其他處理器。通過將大多數數據傳輸發送到最快的可用內存,算法的延遲最小化。因此,保持數據持久或更接近處理器可獲得最佳性能(或降低延遲),因為與 DRAM 或結構網絡相比,緩存中的數據移動速度更快。提高 SAR 算法性能的明顯策略是將盡可能多的行 FDC 數據和列 FDC 數據集分散到多個處理器上。
最大限度地減少在一個處理器上處理的數據量可以改善系統的延遲,但缺點是這會增加外部環路或連接處理器的網絡結構的壓力。SWaP 約束限制了可部署 SAR 系統的大小和重量,導致處理器數量和結構功能之間的折衷。不幸的是,提高整體系統性能并不像提高處理器性能那么簡單。這是因為對于這些類型的 I/O(輸入和輸出)綁定應用程序,網絡結構的性能可能成為瓶頸,從而成為關鍵的性能限制因素。我們需要的是HPEC系統,該系統能夠以最佳方式將更高的速度與更高帶寬的結構網絡(能夠跟上更高速度的處理器的功能)和更高帶寬的結構網絡進行最佳組合。
搜救和空氣速度
同樣,輕量級SAR性能的一個關鍵障礙是系統性能與飛機速度之間的直接關系。SAR使用飛機的運動來幫助“成像”地形。它可以檢測來自光束的反射,然后將這些反射“添加”在一起以形成復合圖像。SAR系統DSP的速度決定了飛機在所需地形上的飛行速度。如果DSP太慢,飛機必須降低速度,以便可以正確成像物體。超過DSP能力的空氣速度將導致圖像數據丟失,這可能是關鍵的。
GP-GPU 是目前速度最高的處理器之一。它們具有數百個連接到高速DRAM的內核。使用GP-GPU創建傳統的SAR系統似乎只是選擇正確的網絡結構以用于在多個GP-GPU集群上有效流式傳輸數據的練習。然而,即使是最快的嵌入式網絡,如10千兆以太網和20千兆位/秒的RapidIO,也無法跟上GP-GPU提供的性能優勢。
因此,顯著提高 SAR DSP 速度的一種方法是對其進行設計,以便將完整的 SAR 傳感器數據幀放入 GP-GPU 內存中。這樣就可以用單個 GP-GPU 替換 HPEC 系統中計算 FDC 的部分。實際上,GP-GPU 在芯片上充當了 HPEC 系統。通過擴展,現在這使得GP-GPU FDC計算的性能決定了可能的有效飛行器速度。例如,每秒傳輸 20 兆字節傳感器數據的 SAR 雷達需要 100 秒來填充 GP-GPU 內存。一些基于英偉達費米架構的新型GP-GPU可以實現4320億次浮點運算(或4320億次浮點運算 - GFLOPS)的峰值性能。這意味著在100秒內,GP-GPU將能夠進行超過40萬億次浮點運算-TFLOP。憑借這種 GP-GPU 性能能力,FDC 和其他計算要求苛刻的算法(如變化檢測、GMTI、交錯 SAR 和 GMTI 以及實時圖像壓縮)可以在小型輕量級 SAR 中使用基于 COTS 的 HPEC 系統來實現。

圖 5: GP-GPU 架構(主板上的高速光纖)
此外,如果SAR數據被分發到一個GP-GPU集群,飛機速度將由集群中的處理速度和/或GP-GPU的數量決定。例如,如果包含十 (10) 個 GP-GPU 的集群面對每秒 20 MB 的傳感器數據,則集群中的單個 GP-GPU 可以提供 300 萬 TFLOPS 的性能。
GP-GPU 在處理數據移動時也具有顯著優勢,這通常是 SAR 算法性能的最大決定因素。與傳統的 CPU 內存控制器相比,使用 GP-GPU 的數據移動速度提高了 4 倍,與結構相比,使用 GP-GPU 的數據移動速度提高了 80 GB/s,而使用 GP-GPU 的數據移動速度提高了 80 倍。由于SAR算法與數據移動速度有關,因此基于GP-GPU的SARS處理速度可以比傳統的基于處理器的HPEC系統快4到10倍。處理性能的顯著提高將使飛機能夠飛得更快、更高,提供更多的成像能力,而不會降低傳統基于CPU的HPEC SAR系統提供的圖像分辨率質量。

圖 6:縮放的 GP-GPU 系統。
下一步是采用基于 GP-GPU 的 HPEC 系統,并在實際應用中對其進行測試。在具有“人性化”環境的飛機中,機艙加壓且沖擊和振動最小,并且沒有限制性的MTBF要求,臺式PC型系統可能就足夠了。對于部署在惡劣環境中的應用,例如無壓、高振動條件,應考慮使用堅固耐用的 COTS GP-GPU 模塊,例如柯蒂斯·賴特控制防御解決方案 (CWCDS) 的 6U OpenVPX (VITA 46/65) VPX6-490 GP-GPU 板。當與配套的單鏈系統(如 CWCDS VPX6-1956 或 CHAMP-AV8)結合使用時,VPX6-490 可提供一個萬億次浮點運算峰值處理性能。每個 VPX6-490 基于英偉達費米的 GP-GPU 都有 2 千兆字節的 GDDR3 內存,帶寬超過 80 GB/s。該板套件具有各種冷卻架構,包括風冷和擴展溫度風冷,但也提供更極端的加固型封裝,如傳導冷卻或氣流通孔(AFT)。
通過將 4 (四) 組 VPX6-490/VPX6-1956 或 CHAMP AV8 卡(八個 1“ 間距 VPX 板)集成到一個重量小于 40 磅的緊湊型 10”x12“x14” 傳導冷卻機箱中,可以構建完整的超級計算機級 HPEC 系統。該示例堅固耐用的 GP-GPU HPEC 系統可為需要 SAR 的最具挑戰性的平臺提供 4 萬億次 SWaP 優化處理能力。VPX6-490 運行英偉達的庫不變。經過開源社區的多年優化,CUDA 庫使 SAR 算法要求更易于實現。因此,用于無人機SAR系統算法處理的多核GP-GPU將比以往任何時候都更高,更快。
審核編輯:郭婷
-
SAR
+關注
關注
3文章
416瀏覽量
45949 -
無人機
+關注
關注
229文章
10420瀏覽量
180138 -
無人駕駛
+關注
關注
98文章
4054瀏覽量
120447
發布評論請先 登錄
相關推薦
怎么實現合成孔徑雷達衛星電磁兼容設計?
合成孔徑雷達轉發式干擾分析
合成孔徑雷達衛星
合成孔徑雷達的研究熱點解析
載合成孔徑雷達系統的接口實現與設計
合成孔徑雷達的工作原理_合成孔徑雷達的特點作用
合成孔徑的雷達研究熱點
合成孔徑雷達原理知識總結






 工商網監
工商網監
評論