") 3D模板匹配算法概述
3D模板匹配算法概述
在PPF算法中,我們的目的是希望通過已有模型,能夠在一個(gè)場(chǎng)景中匹配到和模型相似的目標(biāo)。這是模板匹配最直觀的說法。

圖1 PPF算法論文
“Model Globally,, Match Locally”,顧名思義“整體建模,局部匹配”,因此算法是先對(duì)模型進(jìn)行處理,再進(jìn)行模型與目標(biāo)匹配。算法流程如下:
(一) 整體建模
根據(jù)已建立的3D模型,計(jì)算3D模型表面上的特征點(diǎn)對(duì)的特征矢量;構(gòu)建哈希表(Hash
table),將具有相同特征矢量的點(diǎn)對(duì)放在一起,如圖2所示。
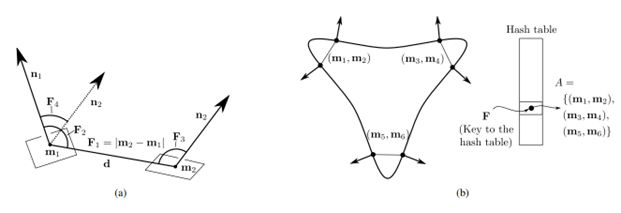
圖2 模型特征點(diǎn)對(duì)和哈希表
(二) 局部匹配
? 在場(chǎng)景點(diǎn)云中任意選取一個(gè)參考點(diǎn),假設(shè)它在物體的表面上,若假設(shè)正確,則在模型上存在一個(gè)點(diǎn)與之對(duì)應(yīng);
? 將這兩個(gè)參考點(diǎn)配準(zhǔn),需同時(shí)將點(diǎn)的位置和法向量對(duì)齊。通過變換矩陣將模型的特征點(diǎn)對(duì)移動(dòng)到一個(gè)新的空間上的原點(diǎn),使其法向量軸與該空間的x軸重合。同理,將場(chǎng)景點(diǎn)云的特征點(diǎn)對(duì)做相同操作。

圖3 模型點(diǎn)云點(diǎn)對(duì)特征和場(chǎng)景點(diǎn)云點(diǎn)對(duì)特征的配準(zhǔn)
(三) 投票
在局部匹配中,我們引入了一個(gè)新的空間,現(xiàn)在需要想方法,每個(gè)變換中找到一個(gè)最優(yōu)的變換矩陣,使得場(chǎng)景點(diǎn)云中落在模型點(diǎn)云表面的特征點(diǎn)最多,就能求得目標(biāo)的位姿。論文通過投票機(jī)制實(shí)現(xiàn),定義一個(gè)二維的數(shù)組,行數(shù)(row)為模型點(diǎn)云特征點(diǎn)對(duì)個(gè)數(shù),列數(shù)(columns)為按采樣步長(zhǎng)的旋轉(zhuǎn)角α個(gè)數(shù)。
? 之前我們?cè)谡w建模的過程中計(jì)算了模型點(diǎn)云的特征點(diǎn)對(duì),現(xiàn)在我們對(duì)場(chǎng)景點(diǎn)云也做一次特征點(diǎn)對(duì)的計(jì)算;
? 以場(chǎng)景點(diǎn)云的特征點(diǎn)對(duì)作為key,去搜索整體建模時(shí)計(jì)算的哈希表,找到與場(chǎng)景點(diǎn)云特征點(diǎn)對(duì)相似的模型點(diǎn)云特征點(diǎn)對(duì);
? 計(jì)算出兩個(gè)點(diǎn)對(duì)之間的旋轉(zhuǎn)角α,對(duì)二維數(shù)組中離散的角度對(duì)應(yīng)位置投票+1;
? 全部計(jì)算完后,就可以得到最大票數(shù)對(duì)應(yīng)的模型點(diǎn)云特征點(diǎn)對(duì)和旋轉(zhuǎn)角。
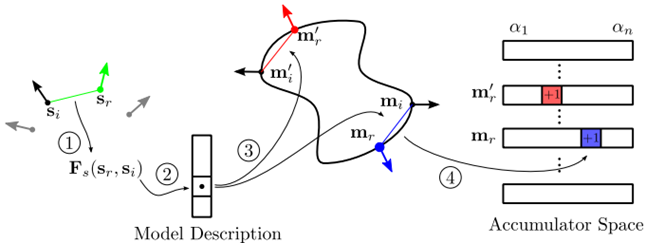
圖4 場(chǎng)景特征點(diǎn)對(duì)搜索模型特征點(diǎn)對(duì)的哈希表
投票完成后,對(duì)于每一個(gè)場(chǎng)景點(diǎn)云特征點(diǎn)對(duì),我們都到了一組滿足條件的姿態(tài)。對(duì)于所有的姿態(tài),通過聚類將之分成多個(gè)組。計(jì)算每個(gè)組內(nèi)所有姿態(tài)的分?jǐn)?shù)加權(quán)和作為該組的一個(gè)評(píng)分。每個(gè)姿態(tài)的分?jǐn)?shù)即為該姿態(tài)在投票環(huán)節(jié)所得的票數(shù)。選取分?jǐn)?shù)最高的組的所有姿態(tài)的均值作為最終的結(jié)果。
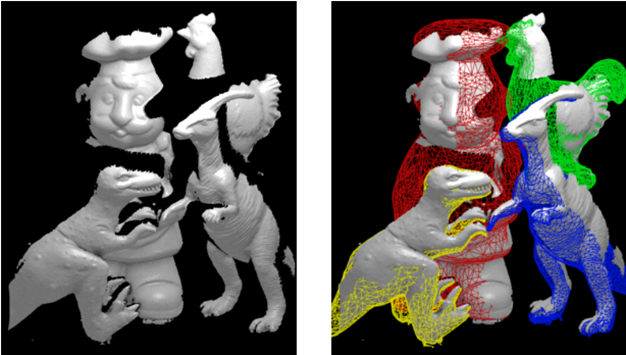
圖5 PPF算法匹配結(jié)果
-
3D
+關(guān)注
關(guān)注
9文章
2928瀏覽量
108464 -
模型
+關(guān)注
關(guān)注
1文章
3415瀏覽量
49476 -
二維
+關(guān)注
關(guān)注
0文章
41瀏覽量
12045
原文標(biāo)題:干貨丨3D模板匹配算法概述
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
什么是模板匹配?模板匹配的原理講解 圖像處理與模板匹配算法
labview的兼容的3d模板
浩辰3D軟件新手入門攻略:標(biāo)準(zhǔn)模板功能詳解
3D分組密碼算法
機(jī)器視覺中基于灰度統(tǒng)計(jì)的快速模板匹配算法詳細(xì)概述

阿里研發(fā)全新3D AI算法,2D圖片搜出3D模型
一種基于熱核的3D對(duì)稱圖形匹配算法
基于熱核的3D對(duì)稱圖形匹配算法及研究
基于熱核的3D對(duì)稱圖形匹配算法研究
模板匹配算法的改進(jìn)及在自動(dòng)發(fā)牌機(jī)中的應(yīng)用

OpenCV邊緣模板匹配算法原理詳解






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論