 基于集成人工肌肉執行器和觸覺應變傳感器的柔性微指系統
基于集成人工肌肉執行器和觸覺應變傳感器的柔性微指系統
據麥姆斯咨詢報道,近日,一支日本立命館大學(Ritsumeikan University)的研究團隊在Scientific Report期刊上發表了題為“Active tactile sensing of small insect force by a soft microfinger toward microfinger-insect interactions”的最新論文,基于集成人工肌肉執行器和觸覺應變傳感器的柔性微指,研究團隊提出了微機器人與昆蟲的交互系統,實現了球潮蟲和微指之間的交互,本研究成果有望應用于觸覺遙操作機器人系統。
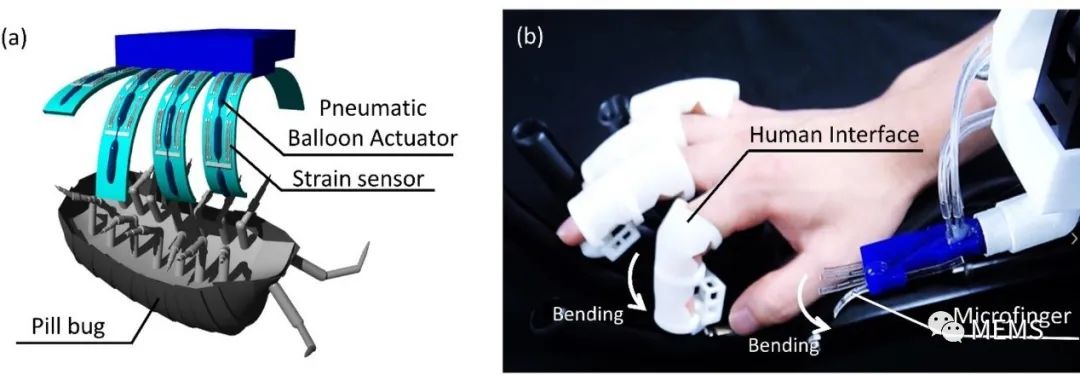
圖1 微指-昆蟲交互系統
微機電系統(MEMS)和“芯片實驗室(LOC)”技術在非常小的芯片上集成了各種傳感和執行功能。這些器件將接收到的物理和化學信號轉換成電信號,使得生化反應可以在芯片上生成和處理。除了芯片上的檢測或反應外,微機械還有潛力作為各種交互作用的中介工具。仿人機器人需要各種傳感器和執行器來模仿人類的功能。專業化和差異化的工業機器人配有傳感器和執行器以完成其任務。縮小尺寸的微型傳感器適用于在不破壞其基本功能的情況下使機器人功能化。此外,微機械有潛力作為與微觀世界進行各種交互的中介工具。微機器人能夠在這個微觀世界中與環境交互,而仿人機器人則是為宏觀世界中與人機交互而設計的。將觸覺接口與微機器人相結合,甚至可以實現微觀世界與我們之間的交互。
微型傳感器已被用于測量昆蟲等小型生物的力。昆蟲的飛行力,作為昆蟲的一種典型力,已被人們使用各種方法對其進行了測量。微型傳感器的直接測量和運動捕捉的圖像處理已被用于力的測量。研究人員利用條紋投影法對飛蛾翅膀的變形、運動和產生的力進行了光學測量。空氣動力垂直力約為7mN。它大約是作用在飛蛾身上的重力(約1.3mN)的5倍。
不僅動物,植物也會產生力來改變它們的形狀和物理特性。捕蠅草上部葉子的運動是眾所周知的植物運動的一個例子。捕蠅草攻擊、抓住和壓縮獵物時產生的力的測量已經被報道。研究人員使用壓電傳感器直接測量其捕食時的平均沖擊力,并使用攝像機確定時間常數。例如,捕蠅草中兩個葉輪緣之間的平均沖擊力為149mN。
之前的大多數研究工作都集中在昆蟲行為的測量,例如飛行力和腿部力。基于集成人工肌肉執行器和觸覺應變傳感器的柔性微指(如圖1a所示),本研究團隊首次提出了微機器人-昆蟲的交互系統。微指可以對目標昆蟲施加力并刺激昆蟲。微指的人工肌肉執行器是一種由聚合物制成的氣動球形執行器(PBA),它足夠柔軟且安全,可以與昆蟲溫和地交互。在之前的研究中,團隊成員已經使用PBA開發了帶有微指的機器人操縱系統,實現了物體抓取運動。此外,他們還開發了用于細胞聚集體操縱的微指,可將球形人類骨髓間充質干細胞(hMSC)聚集體(φ200μm)捏住并釋放在微孔板上。
除了人工肌肉微執行器之外,本論文的研究還將觸覺傳感器集成到微指中。最近,團隊成員利用液態金屬(Galinstan)填充的微通道,開發了一種用于PBA的應變傳感器。這種液態金屬應變傳感器是電阻式的,其應變系數大約為1。該應變傳感器可以通過將液態金屬填充到微通道中來制造。這項研究表明,集成在微指中的液態金屬應變傳感器可以檢測昆蟲的反作用力。因此,微指能夠對活體昆蟲進行主動力傳感。團隊成員還開發并報道了一種觸覺遙操作機器人系統,該系統由一個從屬微指和一個操作員的主接口設備組成。
基于此,本論文提出了一種用于昆蟲反作用力主動傳感的微指末端執行器,它與交互系統(如雙邊控制系統和觸覺遙操作系統)相結合,具有在微觀世界中與昆蟲交互的潛力。
集成PBA和應變傳感器的微指制造工藝
將微指(12mm × 3mm × 490μm)與PBA和應變傳感器集成在一起,制造工藝如圖2所示。PDMS層是通過在硅襯底上的光刻膠(SU-8)模具上模制PDMS(Silpot 184, Dow Corning Inc.)制備的。PBA和液態金屬基傳感器的微通道均由三層PDMS薄膜鍵合而成。微通道寬為50μm,高為50μm。球形區域寬度為800μm。鍵合的PDMS薄膜配備有PDMS互連。Galinstan(共晶鎵銦錫,Zairyo-ya.com)被注入傳感器的微通道中,并通過互連線連接。
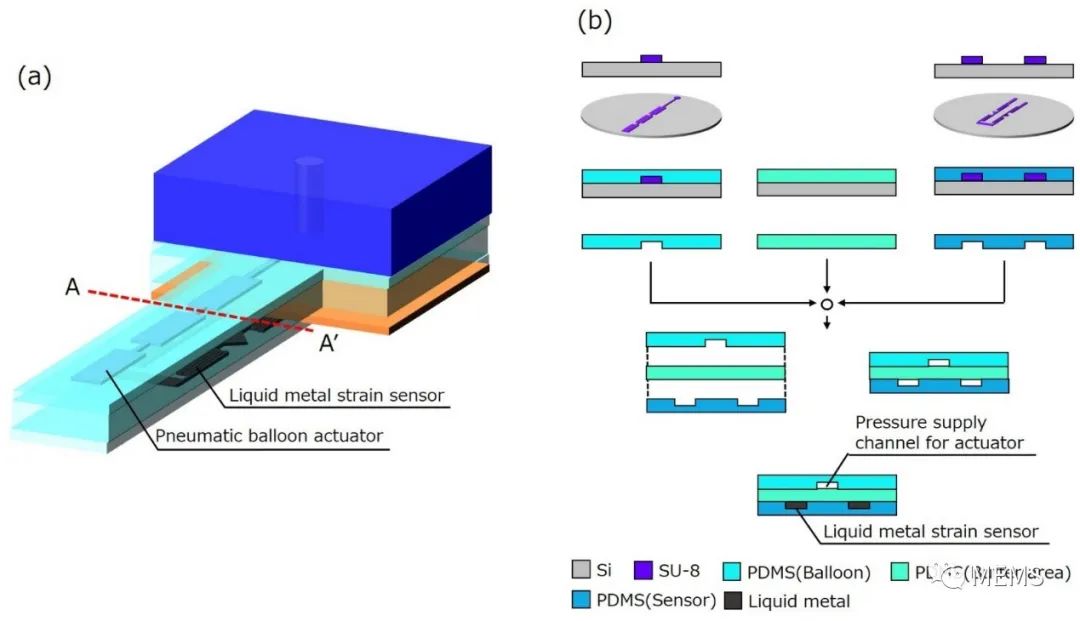
圖2 集成PBA和液態金屬基傳感器的微指制造工藝
基于微指的球潮蟲測力實驗
這項研究旨在測量球潮蟲的腿部力和腹部力。測力實驗的施加壓力設置為140kPa,可產生15.6mN的力。微指的主動傳感被用來測量球潮蟲的力。研究人員在球潮蟲背面施加吸力使其固定。真空鑷子裝置被用于昆蟲的固定底座。圖3a顯示了球潮蟲腿部力的主動傳感,圖3b顯示了腹部力的主動傳感。根據與腿和身體的最佳接觸要求,研究人員調整了球潮蟲的姿態角,如圖3所示。在腿部力測量中,球潮蟲被設置為側向姿勢,而在腹部力測量中,它被調整為仰臥姿勢。
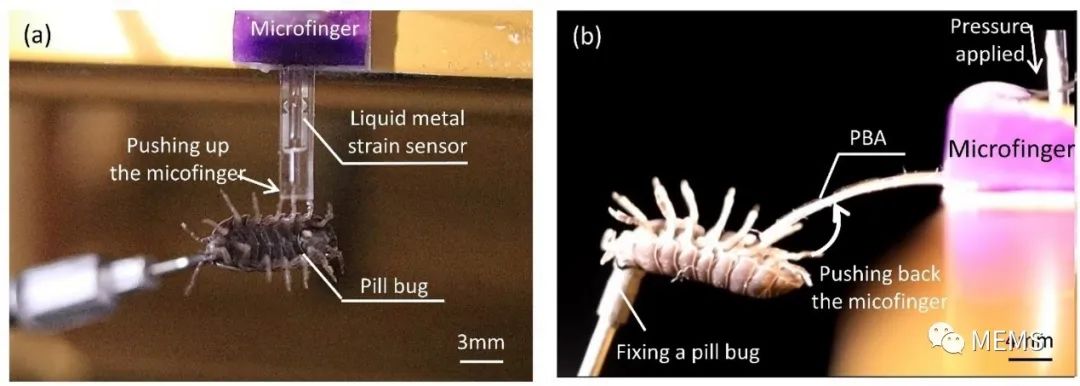
圖3 利用微指測量球潮蟲的力
球潮蟲測力實驗結果
圖4顯示了利用微指主動傳感測得的球潮蟲的力。圖4a和4b分別顯示了隨時間變化的測得的腿部和腹部力。測量的腿部力小于10mN,如圖4a所示。腿部運動的頻率大約為0.3Hz。測得的腹部力超過10mN,大于腿部力,如圖4b所示。圖4b中腹部運動的頻率低于腿部運動的頻率,估計約為0.03Hz。腿部運動的頻率遠高于腹部運動的頻率。將微指推回的位移量越大,往往會顯示出更大的力。
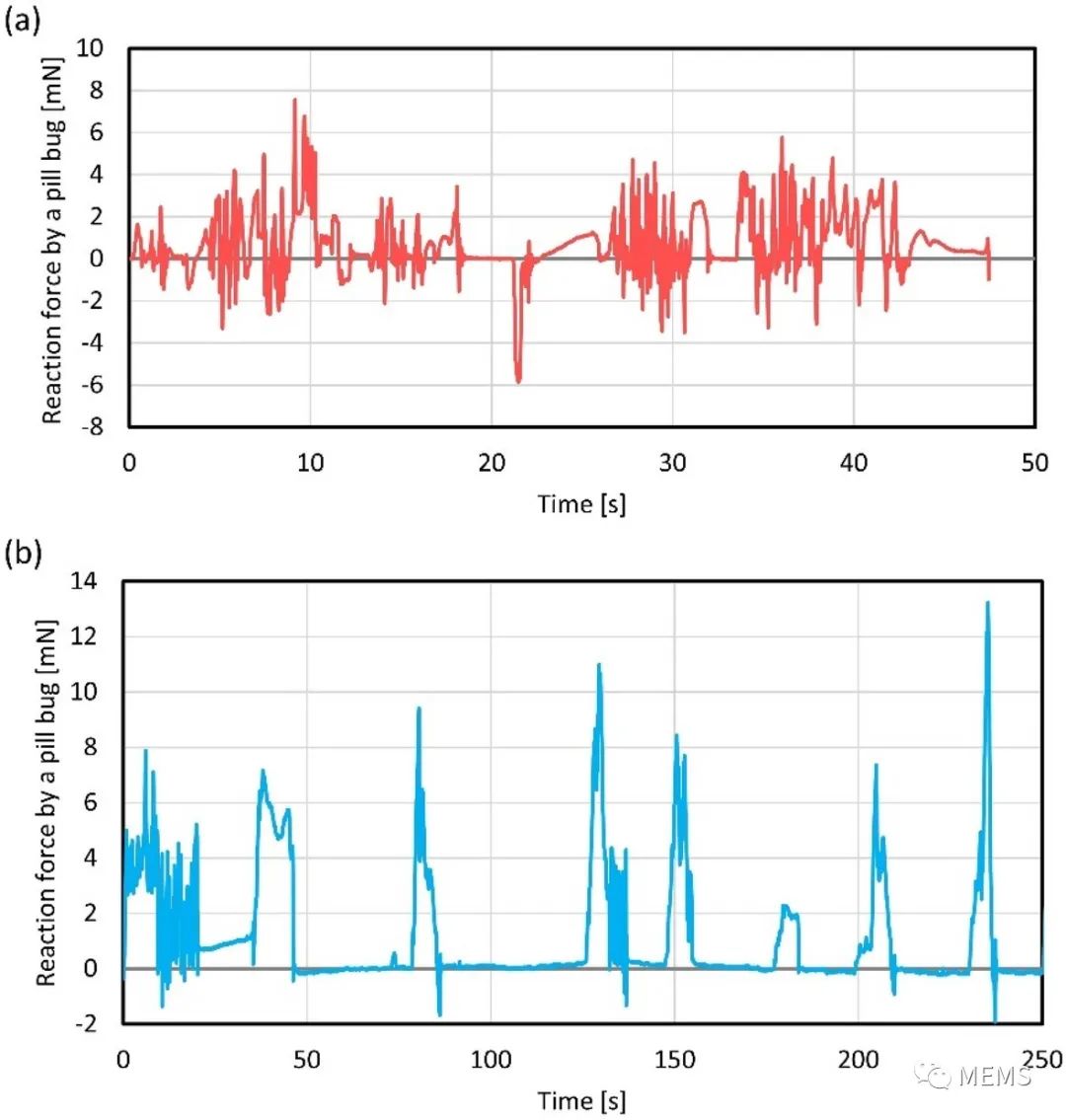
圖4 通過微指主動傳感測得的球潮蟲的力
實驗中檢測到的信息可用于圖1b所示的觸覺遙操作機器人系統,它將微指作為從屬組件,并與操作員的主接口設備相結合。該系統能夠通過觸覺遙操作機器人系統呈現由微指與昆蟲交互獲得的觸覺。
綜上,基于與人工肌肉執行器和觸覺傳感器集成的柔性微指,研究團隊提出了微機器人-昆蟲交互系統,該技術是為觸覺遙操作機器人系統開發的。研究團隊實現了球潮蟲和微指之間的交互。微指(12mm?×?3mm?×?490μm)作為末端執行器,可以移動和觸摸昆蟲,并且可以檢測昆蟲的反作用力。本文的研究結果將推動對微小型生物的進一步評估,以及人類與環境交互的技術發展。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753080 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
交互系統
+關注
關注
0文章
33瀏覽量
8125
原文標題:基于柔性微指的主動觸覺傳感系統,實現微機器人與昆蟲的交互
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
[分享][下載]美國PPS觸覺傳感器有限公司
[原創]美國PPS觸覺傳感器有限公司
美國PPS觸覺傳感器有限公司
無線傳感器及執行器網絡
柔性結構振動主動控制中傳感器/ 執行器
帶觸覺反饋的壓電執行器:全新尺寸,非凡性能
帶觸覺反饋的PowerHap壓電執行器
MEMS微執行器技術現狀與未來展望
汽車控制系統中的電子控制單元和傳感器以及執行器
迅速增長的MEMS傳感器和執行器應用
物聯網執行器和傳感器
采用梯度剛度滑動設計的柔性應變傳感器






 工商網監
工商網監
評論