 機器人輔助的聲流控末端效應器的應用
機器人輔助的聲流控末端效應器的應用
液體操作是眾多實驗室工作得以正常開展的基礎。在過去十年中,芯片實驗室(LOC)系統已開始用于微液體操作,盡管機器人與芯片實驗室有潛在的協同作用,但是各自獨立發展,目前還沒有合適的接口來連接宏觀級機器人與微觀級芯片實驗室或微流控器件。
據麥姆斯咨詢報道,瑞士蘇黎世聯邦理工學院(ETHZ)攜手蘇黎世大學(UZH)及美國內布拉斯加林肯大學(UNL)開發出一種機器人輔助的聲流控末端效應器(RAEE)系統,該系統包括機械臂和聲流控末端效應器,并結合了機器人和微流控功能。
研究人員進一步進行了流體泵送、微粒和斑馬魚胚胎捕獲,以及復雜粘性液體的移動混合的實驗。最后,他們對機器人輔助的聲流控末端效應器系統進行了預編程,以實現孔板中粘性液體的自動混合,這展示了其在自動執行化學進程中的多功能性。
注:效應器(effector)原指運動神經末梢和它所支配的肌肉或腺體,本文指附著在機器人機械臂上的外圍設備,允許機器人與其任務相互作用。
該聲流控末端效應器包括一個外徑為1500?μm,末端細至3μm~10?μm的中空硼硅酸鹽毛細管,加上一個壓電電子換能器。該壓電換能器基于調節頻率和振幅的電子函數發生器的輸入產生聲波,從而控制毛細管的振蕩。聲波的激勵頻率從5kHz調制到300?kHz,同時保持1~20?VPP的峰值電壓。
該聲流控效應器通過五軸機械臂的注射器連接到定制的3D打印支架上。研究人員將整個裝置放在倒置的顯微鏡附近,并通過熒光顯微鏡對系統進行研究。該裝置的特征在于將其浸入含有2.0μm和5.0?μm示蹤粒子(下圖b)的液體腔室中,并使用光敏和高速相機捕捉實驗結果。
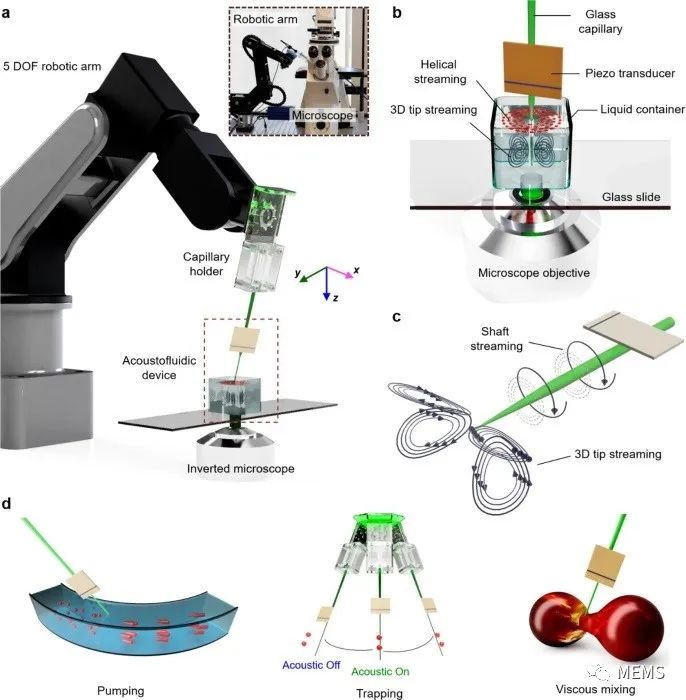
機器人輔助的聲流控末端效應器(RAEE)的實驗裝置和工作原理
研究人員在毛細管尖端觀察到與頻率相關的3D流曲線。這些曲線包括不等量的順時針流動模式和逆時針流動模式(見下圖)。當毛細管分別暴露于頻率為64.6?kHz和140?kHz的超聲波下時,出現了由四個反向旋轉的渦流組成的復雜蝶形渦流模式(下圖a、b)。
洋紅色圓圈代表毛細管尖端,黃色箭頭表示流向。相比之下,?分別在69.5?kHz和269?kHz的激勵頻率?下,僅產生了一對關于尖端對稱的反向旋轉漩渦(下圖c、d)。
盡管這兩個流曲線相似,但下圖d中的流曲線相對于下圖c中的流曲線旋轉了135°。有趣的是,雖然大多數已形成的流動模式是關于尖端對稱的,但也觀察到一些例外情況。
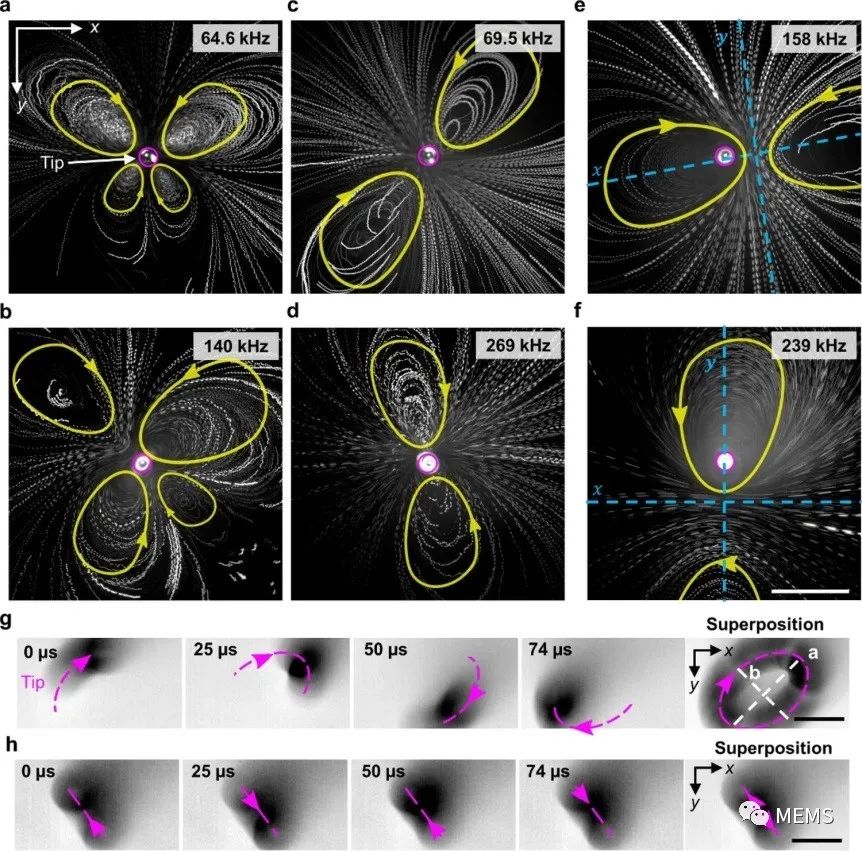
在含有示蹤粒子的水中,聲流控裝置尖端產生特定頻率的旋渦或流體
研究人員采用較低的頻率,并使用高速成像相機捕捉空氣中毛細血管尖端的振蕩。他們從正面和側面研究了毛細管的振蕩。總體而言,觀測結果顯示機器人輔助的聲流控末端效應器在毛細管尖端附近產生不同強度的可控流動模式的能力,受驅動頻率和聲功率調制的影響。
而斑馬魚胚胎是極好的高等哺乳動物替代模型,其經常被用來研究與人類疾病相關的分子機制,并廣泛用于制藥目的的治療研究。在該實驗中,研究人員設計了一種基于振蕩玻璃毛細管發出的聲輻射力的捕獲裝置。該設備與機械臂的集成使研究人員能夠根據任何預編程軌跡,在2D和3D環境中捕捉和操縱胚胎。
他們通過捕獲并麻醉受精后(HPF)120小時的斑馬魚胚胎,來證明機器人輔助的聲流控末端效應器的多功能特性。當毛細管末端和斑馬魚胚胎之間為毫米距離時,研究人員將機器人輔助的聲流控末端效應器帶到胚胎附近并激活。他們觀察到胚胎被強力拉向聲流控裝置,也就是說,它已經被捕獲在毛細管末端了(下圖a)。
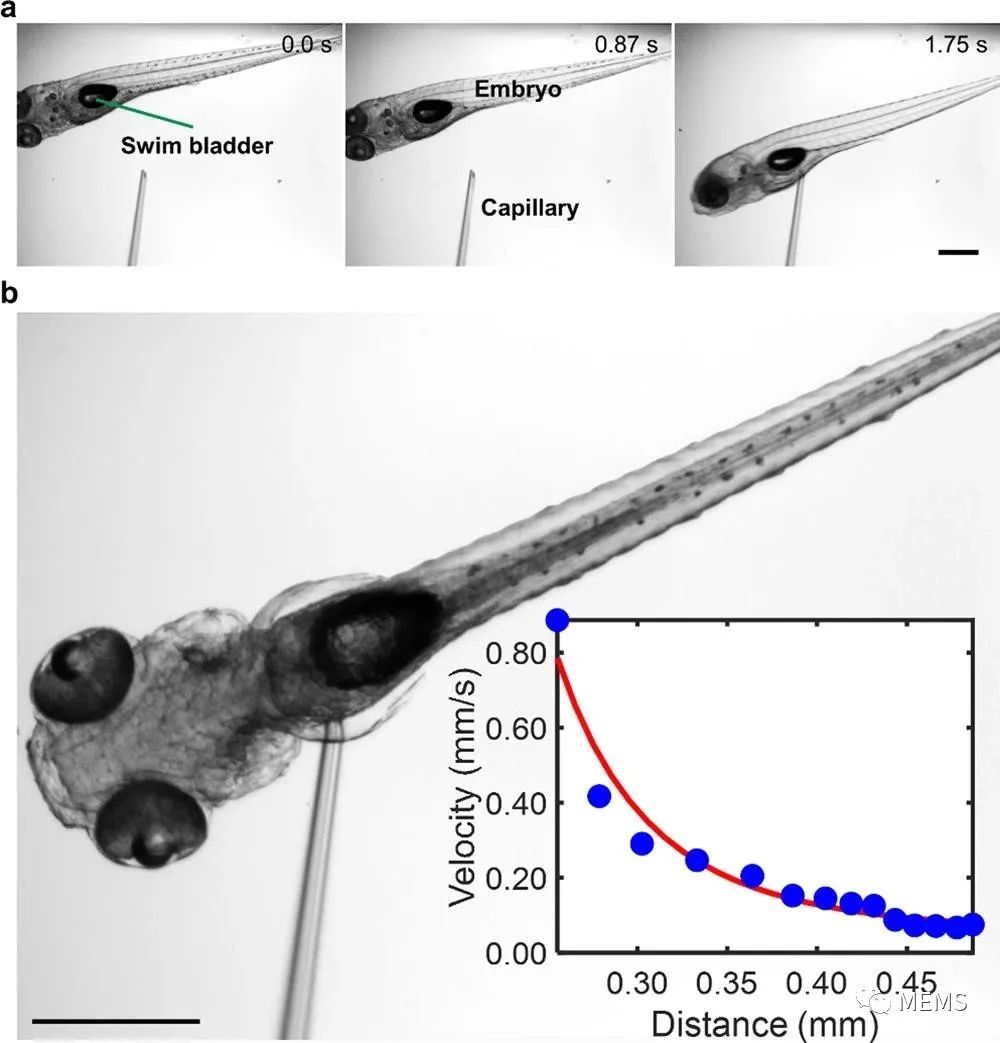
利用機器人輔助的聲流控末端效應器捕捉斑馬魚胚胎
綜上所述,該論文介紹了首個結合機械臂的聲流控末端效應器,從而實現了宏觀級機器人與微觀級液體和粒子操縱技術之間的連接。機器人輔助的聲流控末端效應器是一個多功能平臺,可以廣泛應用于化學、生物學和生命科學等領域。這種新型基于毛細管的聲流控裝置產生兩種不同的穩定渦旋流曲線:(i)沿毛細管的螺旋流或螺旋狀運動;(ii)毛細管尖端的與頻率相關的3D流曲線。
為了證明該系統的通用性性和多功能性,研究人員對粘性液體進行了泵送、液滴合并、選擇性微粒捕集和移動混合。他們進一步演示了斑馬魚胚胎的捕獲。最后,他們對機器人輔助的聲流控末端效應器進行了預編程,使其能夠在孔板中實現粘性液體的自動混合,證明了其在化學過程自動執行中的多功能性。
該聲流控裝置的制造成本不到20美元,可以連接到任何商用機械臂上,并實現自動化和多功能性,值得注意的是,操作的精度取決于機械臂。盡管如此,由于其易于構建,多功能機器人輔助的聲流控末端效應器在需要重復樣品制備的基礎步驟或轉化研究中可能會更有價值,特別是涉及微量移液,以及其它通常由人工操作執行的研究。
審核編輯:劉清
-
VPP
+關注
關注
0文章
7瀏覽量
9497 -
換能器
+關注
關注
8文章
346瀏覽量
29480 -
微流控器件
+關注
關注
0文章
40瀏覽量
3186
原文標題:機器人輔助的聲流控末端效應器,可用于胚胎捕獲、液體混合及微量移液
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
基于漩渦湍流輔助的微流控平臺,可實現類精子結構的微型機器人一步成型






 工商網監
工商網監
評論