 什么是持續光電導效應
什么是持續光電導效應
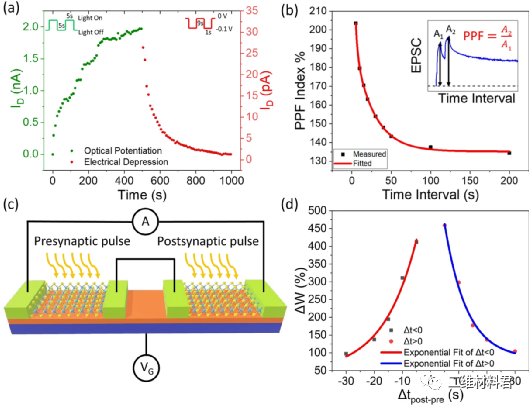
光學數據傳感、處理和視覺記憶是人工智能和具有自主導航功能的機器人的基本要求。在傳統的設計中,成像與模式識別電路分開。光電突觸具有將這兩部分集成到單層中的特殊潛力,利用單個器件記錄光學數據,將其轉換為電導狀態并存儲用于學習和模式識別,類似于人眼中的視神經。在這項工作中,利用N溝道MoS2晶體管MoS2/SiO2界面處光生載流子的捕獲和去捕獲來模擬光電突觸特性。單層MoS2晶體管(FET)表現出了光致短時程和長時程增強(STP/LTP),電致長時程抑制(LTD),雙脈沖易化(PPF),脈沖時間依賴可塑性(STDP)這些必要的突觸特性。此外,該器件保持一定電導狀態的能力可以通過柵極電壓進行調制,使該器件在正柵極電壓下表現為光電探測器,以及負柵極電壓下表現為光電突觸。
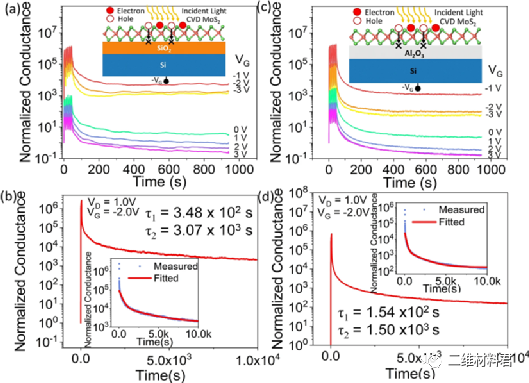
單層MoS2晶體管可以作為光電突觸來用的底層原理是——持續光電導效應。什么是持續光電導效應呢?簡單來說就是光照停止后材料的電導率還會維持在較高的一個狀態的現象。這篇文章給出的原理解釋是:在負的柵極電壓作用下,部分光生空穴向柵氧化層遷移被困在MoS2/SiO2界面處陷阱中心,因此,在光脈沖撤去后,與之對應的那部分光生電子無法與捕獲的空穴復合,有助于提高MoS2溝道的電導率,也就是形成了持續光電導。
這篇文章主要研究了以下幾件事:
第一個就是在正的柵電壓下,單層MoS2晶體管對光照的響應,此時是不存在持續光電導效應的,也就是說這個時候器件只能作為光電探測器來用,至于為什么正電壓沒有持續光電導效應,感興趣的同學可以深入思考一下告訴我答案~
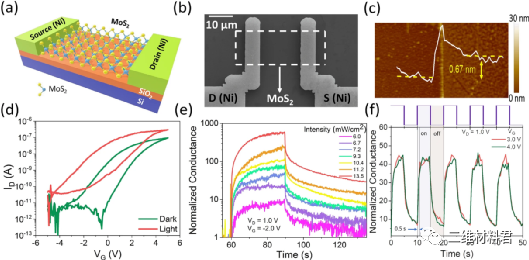
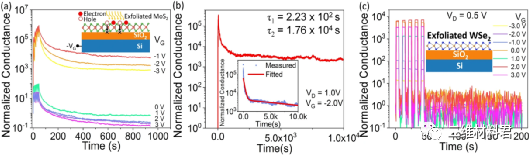
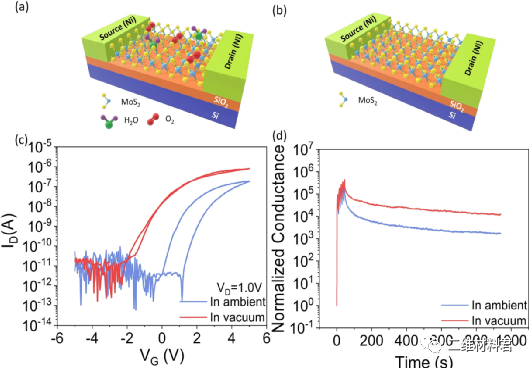
第二個就是在負的柵電壓下,單層MoS2晶體管對光照的相應,存在持續光電導效應,可以作為光電突觸來用。不同工作電壓對應的維持電導穩態是不相同的,至于為什么不是-3 V對應的穩態電導最大,可以思考下原因(跟工作電壓以及光生載流子等都有關系)。除了這些,作者還研究了溝道材料(CVD生長和機械剝離的MoS2,機械剝離的持續光電導效應更明顯,說明材料本身缺陷降低持續光電導效應),介質(影響不大),氛圍(真空or空氣,吸附的水汽和氧氣對持續光電導效應也是負作用),其他二維材料(沒有持續光電導效應),這些多場因素的研究大概就是這篇文章能發在Scientific Reports上的原因吧~大佬們做實驗就想著把能想到的都做完,挖坑填坑一步到位。除了讓人看到了一些研究的現象,也通過了對比實驗試圖去找到最優配置,以及嘗試解釋這些現象下的本質原因。
第三個就是研究了單層MoS2晶體管光電突觸脈沖雙脈沖易化以及時間依賴可塑性(STDP)。
-
機器人
+關注
關注
211文章
28512瀏覽量
207497 -
光電探測器
+關注
關注
4文章
267瀏覽量
20536 -
柵極電壓
+關注
關注
0文章
69瀏覽量
12820
原文標題:單層二硫化鉬晶體管秒變光電突觸
文章出處:【微信號:二維材料君,微信公眾號:二維材料君】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論