 基于微慣性傳感器的高靈敏度隨動控制技術
基于微慣性傳感器的高靈敏度隨動控制技術
隨著現代軍事裝備的智能化升級,武器裝備對感知認知與智能控制提出了更高需求。隨動裝備作為一種典型的智能化裝備,通過多種技術手段把受控對象與操控人員的肢體動作直接結合,實現自然的人機交互方式,提升作戰效率。
在隨動控制系統中,隨動精度與隨動時延均為關鍵性指標,二者共同決定了隨動控制裝備的人機交互體驗,需要機電系統既能滿足實時性需求,又能滿足精度指標。因此兼顧實時性與準確性的系統方案成為隨動系統的設計難點。
據麥姆斯咨詢報道,為了解決隨動精度與隨動時延問題,中國兵器工業計算機應用技術研究所、北京衛星導航中心的研究人員提出一種基于微慣性器件與模糊控制云臺的低延遲體感隨動控制技術。該技術使用微慣性單元(MEMS IMU)獲取高靈敏度體感姿態數據,并使用該姿態數據對雙軸云臺進行實時高精度隨動控制。通過低成本高采樣頻率的姿態算法與高實時性與響應精度的小型雙軸云臺模糊控制算法改進,能夠在88.17 ms內實現均方根誤差(RMSE)1.478°的隨動控制。該隨動控制系統可以滿足無人機控制與觀察、車載雷達與武器站控制等領域,可大幅降低設備操控復雜度,提升控制特性。相關研究成果已發表于《兵工學報》期刊。
該項工作中,研究人員選取微慣性傳感器與小型云臺構成的隨動系統作為研究對象,分別對實時姿態采集算法與云臺控制方案進行設計,提升隨動系統實時性與準確性。在姿態解算方面,選用低成本小型六軸微機電慣性測量單元作為傳感單元,通過姿態解算與互補濾波獲取實時準確的姿態信息。在云臺控制方面,使用模糊控制PID高頻位置閉環算法改善現有雙軸云臺的機電控制系統,兼顧非線性輸入下機電響應的實時性與準確性。
小型云臺結構示意圖
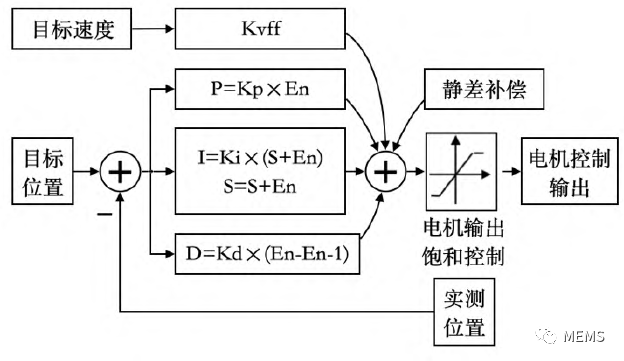
數字PID控制器設計
為了對基于微慣性器件與模糊控制云臺的隨動系統控制實時性與準確性進行驗證,研究人員設計了三項實驗。首先是“姿態測量精度實驗”,使用高精度雙軸轉臺對慣性器件的短時測量精度進行驗證,驗證隨動系統的姿態測量精度。其次是“頭部運動測量實驗”,利用第一項實驗中的姿態測量系統對人體頭部運動進行測量,獲取人體頭部運動的典型參數。最后結合第二項實驗中的人體頭部運動典型參數,設計“位置隨動控制實驗”,對微慣性器件與模糊控制云臺隨動系統性能進行綜合表征,驗證隨動系統的實時性與準確性。
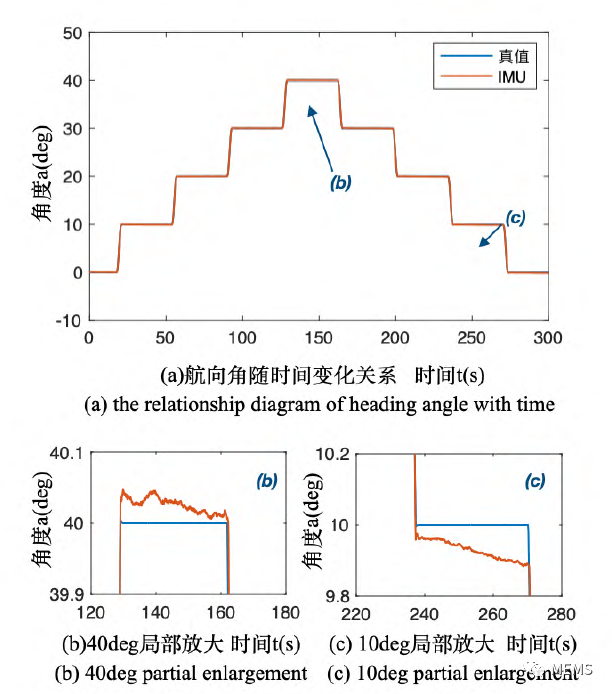
姿態測量精度實驗

頭部運動測量實驗設備
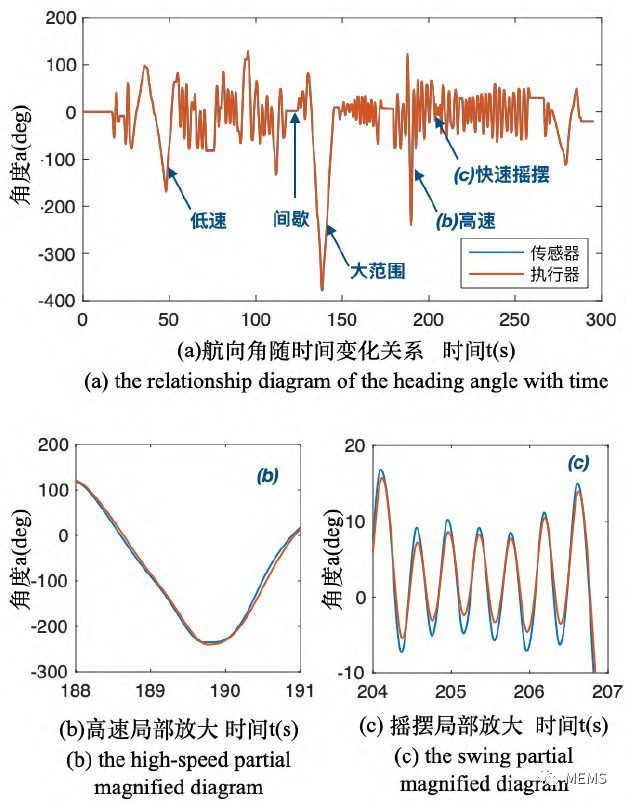
位置隨動響應實驗
結果表明,在實驗過程300 s內,綜合低速、間歇、大范圍、高速、搖擺等運動形式,隨動系統精度較高,能夠在88.17 ms內實現均方根誤差(RMSE)1.478°的隨動運動精度,可以滿足位置隨動控制精度需求。該精度主要受限于機電控制環節,提升響應速度與精度一方面可以通過載荷、編碼器、機械結構、線纜減重以降低轉動慣量實現;另一方面,提升電機效率,能在單位轉動慣量下實現更高功率輸出,也能改善隨動系統的機電特性。
該項工作通過傳感器的實時采集算法改進與云臺的高頻位置閉環模糊PID控制設計,用低成本實現了低延遲高精度隨動控制功能。研究人員稱,后續將繼續開展相應優化工作,一方面圍繞慣性系統濾波修正,引入觀察量提升隨動控制的長期穩定性;另一方面繼續提升執行器機電性能,提升隨動控制的響應速度與精度。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2557文章
51729瀏覽量
758802 -
控制技術
+關注
關注
3文章
348瀏覽量
33295
原文標題:基于微慣性傳感器的高靈敏度隨動控制技術
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
傳感器的靈敏度
MDT高靈敏度卓越性能的Z軸TMR傳感器
高靈敏度光纖光柵壓力傳感器及其壓力傳感特性的研究
高靈敏度微機械薄膜的設計、模擬與優化
FKS高靈敏度氣壓傳感器
CMOS工藝中的高靈敏度垂直霍爾傳感器的資料詳細說明






 工商網監
工商網監
評論