") 伺服系統(tǒng)構(gòu)成及其工作原理
伺服系統(tǒng)構(gòu)成及其工作原理
00
引言
“伺服(Servo)”一詞源于希臘語“奴隸”,意即“伺候”和“服從”,伺服系統(tǒng)就是指可以按照外部指令進(jìn)行人們所期望的運(yùn)動(dòng)的系統(tǒng),實(shí)現(xiàn)包括位置、方位、狀態(tài)等輸出量的自動(dòng)控制。它不僅是工業(yè)自動(dòng)化的關(guān)鍵環(huán)節(jié),也是實(shí)現(xiàn)精準(zhǔn)定位、精準(zhǔn)運(yùn)動(dòng)的必要途徑。作為伺服系統(tǒng)的執(zhí)行單元,伺服電機(jī)種類繁多,其中永磁同步伺服電機(jī)因其高效節(jié)能、操作簡(jiǎn)易等優(yōu)點(diǎn),逐漸成為市場(chǎng)主流。相比于步進(jìn)電機(jī),伺服電機(jī)在控制精度、穩(wěn)定輸出、過載能力等性能上優(yōu)勢(shì)明顯,在工業(yè)領(lǐng)域廣泛使用。本文將簡(jiǎn)單介紹伺服系統(tǒng)以及伺服電機(jī)的工作原理及其分類,并對(duì)伺服電機(jī)的常用性能指標(biāo)作出說明。
01
伺服系統(tǒng)構(gòu)成及其工作原理
伺服系統(tǒng)主要由伺服驅(qū)動(dòng)器、編碼器和伺服電機(jī)等部件構(gòu)成,其運(yùn)動(dòng)原理圖如下圖所示:
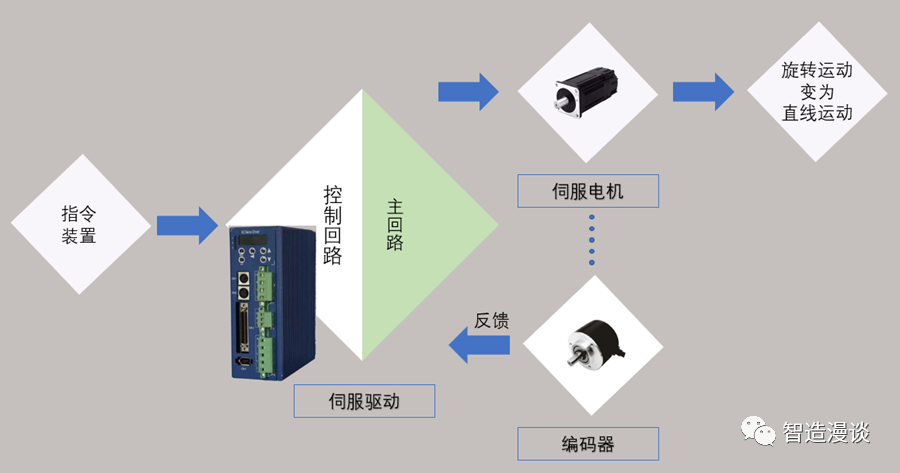
伺服系統(tǒng)是一種自動(dòng)控制系統(tǒng),能使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入目標(biāo)(或給定值)的變化而變化。伺服驅(qū)動(dòng)器在接收下達(dá)的控制命令后,會(huì)發(fā)出信號(hào)給伺服電機(jī)驅(qū)動(dòng)其轉(zhuǎn)動(dòng);與此同時(shí),嵌入電機(jī)的編碼器將伺服電機(jī)的運(yùn)動(dòng)參數(shù)反饋給伺服驅(qū)動(dòng)器,由伺服驅(qū)動(dòng)器完成對(duì)信號(hào)的匯總、分析和修正。由此,伺服系統(tǒng)以閉環(huán)的形式精確控制了執(zhí)行機(jī)構(gòu)(電機(jī)等機(jī)械傳動(dòng)裝置)的輸出變量。
伺服驅(qū)動(dòng)器、伺服電機(jī)及編碼器的功能介紹如下:
01
伺服驅(qū)動(dòng)器
1、構(gòu)成
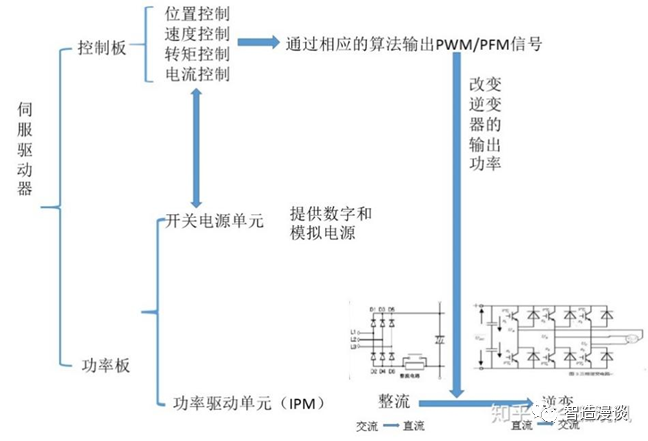
伺服驅(qū)動(dòng)器主要由伺服控制單元、功率驅(qū)動(dòng)單元、通訊接口單元組成。其中伺服控制單元包括位置控制器、速度控制器、轉(zhuǎn)矩和電流控制器等。
伺服驅(qū)動(dòng)器大體可以劃分為功率板和控制板兩個(gè)模塊。功率板是強(qiáng)電部分(功率大、電流大、頻率低的電力部分),其中包括兩個(gè)單元,一是功率驅(qū)動(dòng)單元IPM,用于電機(jī)的驅(qū)動(dòng),二是開關(guān)電源單元,為整個(gè)系統(tǒng)提供數(shù)字和模擬電源。控制板是弱電部分,是電機(jī)的控制核心,也是伺服驅(qū)動(dòng)器技術(shù)核心控制算法的運(yùn)行載體。控制板通過相應(yīng)的算法輸出脈沖寬度調(diào)制(PWM)或脈沖頻率調(diào)制(PFM)信號(hào),作為驅(qū)動(dòng)電路的驅(qū)動(dòng)信號(hào),來改變逆變器的輸出功率,以達(dá)到控制交流伺服電機(jī)的目的。其中,逆變器是把直流電能(電池、蓄電瓶)轉(zhuǎn)變成定頻定壓或調(diào)頻調(diào)壓交流電(一般為220V,50Hz正弦波)的轉(zhuǎn)換器。
伺服驅(qū)動(dòng)器主要材料成本中,IGBT和DSP芯片占總材料成本的50%以上。IGBT即絕緣柵雙極型晶體管,是由雙極型三極管和絕緣柵型場(chǎng)效應(yīng)管組成的復(fù)合全控型電壓驅(qū)動(dòng)式功率半導(dǎo)體器件,兼有金氧半場(chǎng)效晶體管的高輸入阻抗和電力晶體管的低導(dǎo)通壓降兩方面的優(yōu)點(diǎn),用于功率驅(qū)動(dòng)單元,能夠輔助直流電轉(zhuǎn)變?yōu)榻涣麟姟N覈鳬GBT市場(chǎng)90%以上被外資企業(yè)占領(lǐng),在短時(shí)間內(nèi)IGBT實(shí)現(xiàn)國產(chǎn)化較為困難。
2、工作原理
控制單元是整個(gè)交流伺服系統(tǒng)的核心,是系統(tǒng)位置控制、速度控制、轉(zhuǎn)矩和電流控制器。控制板所采用的數(shù)字信號(hào)處理器(DSP)除了具有快速的數(shù)據(jù)處理能力外,還集成了豐富的用于電機(jī)控制的專用集成電路,如AC/DC(交流直流)轉(zhuǎn)換器、PWM發(fā)生器、定時(shí)/計(jì)數(shù)器電路、異步通訊電路、CAN(控制局域網(wǎng)絡(luò))總線收發(fā)器以及高速的可編程靜態(tài)RAM(隨機(jī)存取存儲(chǔ)器)和大容量的程序存儲(chǔ)器等,可以實(shí)現(xiàn)比較復(fù)雜的控制算法,實(shí)現(xiàn)數(shù)字化、網(wǎng)絡(luò)化和智能化。
功率器件普遍采用以智能功率模塊(IPM)為核心設(shè)計(jì)的驅(qū)動(dòng)電路,IPM內(nèi)部集成了驅(qū)動(dòng)電路,同時(shí)具有過電壓、過電流、過熱、欠壓等故障檢測(cè)保護(hù)電路。功率驅(qū)動(dòng)單元首先通過三相全橋整流電路對(duì)輸入的三相電或者市電進(jìn)行整流,得到相應(yīng)的直流電。經(jīng)過整流好的三相電再通過逆變器變頻輸出交流電來驅(qū)動(dòng)伺服電機(jī)。功率驅(qū)動(dòng)單元的整個(gè)過程可以簡(jiǎn)單的說就是AC-DC-AC的過程。
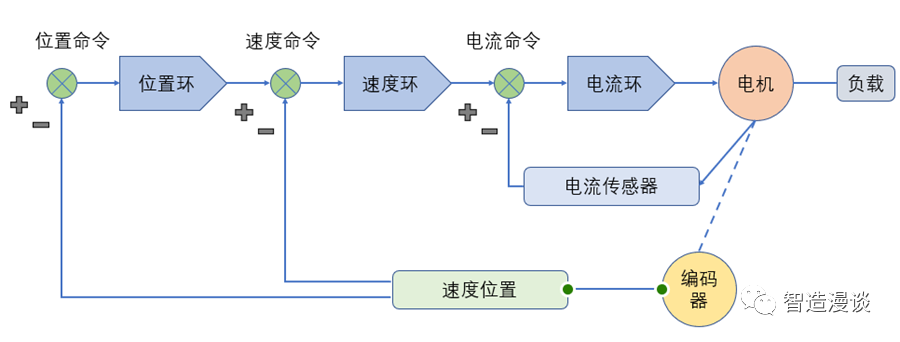
伺服回路可根據(jù)輸入命令信號(hào)提供電機(jī)的比例控制。簡(jiǎn)單的伺服驅(qū)動(dòng)器包含用于控制扭矩的單個(gè)伺服回路。更先進(jìn)的伺服驅(qū)動(dòng)器可增設(shè)速度環(huán),并且還可以包含位置環(huán)。在完整的伺服驅(qū)動(dòng)器系統(tǒng)中,運(yùn)動(dòng)控制器發(fā)出的數(shù)字信號(hào)將命令所需的運(yùn)動(dòng)軌跡利用這三個(gè)伺服回路來優(yōu)化性能。每個(gè)環(huán)路向后續(xù)環(huán)路發(fā)送信號(hào),并監(jiān)測(cè)適當(dāng)?shù)姆答佋瑥亩M(jìn)行實(shí)時(shí)更正,以匹配命令參數(shù)。
02
伺服電機(jī)
1、構(gòu)成
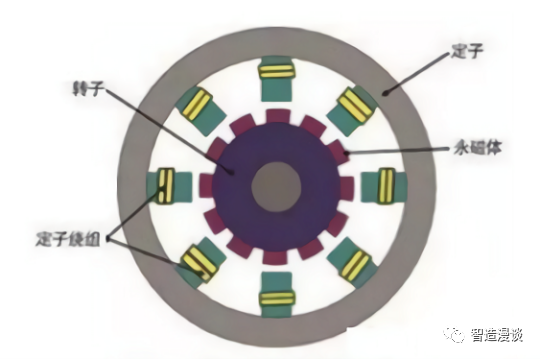
市場(chǎng)主流的交流伺服電機(jī)由前后端蓋、軸承、定子、轉(zhuǎn)子以及編碼器等部件組成,其核心部件是定子、轉(zhuǎn)子和編碼器(編碼器在下文單獨(dú)介紹)。交流伺服電機(jī)結(jié)構(gòu)圖如下圖所示:

定子主要由機(jī)座、定子鐵芯和定子繞組三部分組成,其中機(jī)座一般用鋁或不銹鋼制成,用于固定和支撐定子鐵芯;定子鐵芯由硅鋼片或鐵鎳合金疊壓而成,用于鑲嵌定子繞組;定子繞組是定子鐵芯上固定的線匝,均勻地分布在定子槽里,主要用于在通電后形成旋轉(zhuǎn)磁場(chǎng)。
永磁式同步伺服電機(jī)的轉(zhuǎn)子主要由轉(zhuǎn)子鐵芯、永磁體和轉(zhuǎn)軸組成,其中轉(zhuǎn)子鐵芯由硅鋼片疊成,能增加電感線圈(定子繞組)的磁通量,實(shí)現(xiàn)電磁功率的最大轉(zhuǎn)換;永磁體材料分為鋁鎳鈷系永磁合金、鐵鉻鈷系永磁合金、永磁鐵氧體、稀土永磁材料和復(fù)合永磁材料等,其內(nèi)部存在著分子電流,能夠形成磁場(chǎng);轉(zhuǎn)軸則用于輸出機(jī)械轉(zhuǎn)矩。異步交流電機(jī)的轉(zhuǎn)子沒有永磁體,但有轉(zhuǎn)子繞組,繞組由導(dǎo)線纏繞而成,用于切割旋轉(zhuǎn)磁場(chǎng)產(chǎn)生感應(yīng)電流。
2、交流伺服電機(jī)的工作原理
交流伺服電機(jī)按照轉(zhuǎn)子速度與旋轉(zhuǎn)磁場(chǎng)是否同步,可以分為交流同步電機(jī)和交流異步電機(jī)。其工作原理均基于電磁感應(yīng)定律,主要區(qū)別在于轉(zhuǎn)子轉(zhuǎn)動(dòng)的速度與旋轉(zhuǎn)磁場(chǎng)是否同步。具體如下:
(1)永磁式同步伺服電機(jī)
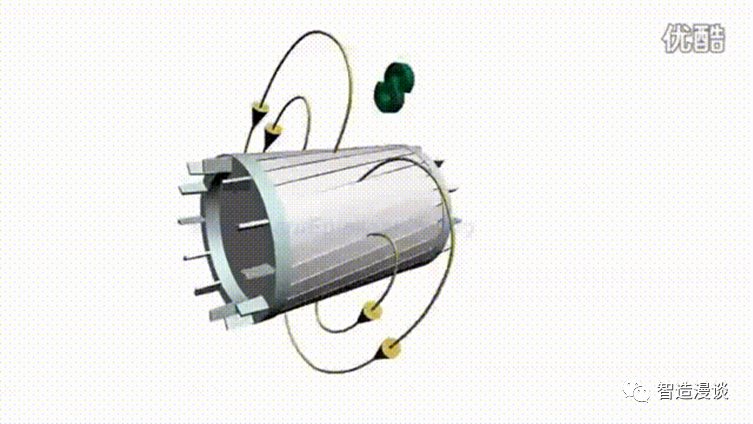
永磁式同步伺服電機(jī)的轉(zhuǎn)子中裝有永磁體,當(dāng)定子繞組接通控制電壓時(shí),產(chǎn)生的電流共同作用產(chǎn)生一個(gè)合成的旋轉(zhuǎn)磁場(chǎng),永磁體產(chǎn)生的磁場(chǎng)與旋轉(zhuǎn)磁場(chǎng)相互作用,使得轉(zhuǎn)子與旋轉(zhuǎn)磁場(chǎng)同步旋轉(zhuǎn)。

永磁同步電機(jī)的結(jié)構(gòu)圖和工作原理
(2)交流異步伺服電機(jī)
在異步交流伺服電機(jī)中,定子繞組接入交流電源,產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)被轉(zhuǎn)子繞組上的導(dǎo)條切割,從而使轉(zhuǎn)子繞組產(chǎn)生感應(yīng)電流,感應(yīng)電流在旋轉(zhuǎn)磁場(chǎng)的作用下產(chǎn)生電磁力,帶動(dòng)轉(zhuǎn)子隨著定子旋轉(zhuǎn)磁場(chǎng)轉(zhuǎn)向旋轉(zhuǎn),但轉(zhuǎn)子趕不上定子磁場(chǎng)變換的速度,或不同步,所以稱為做“異步”。如果轉(zhuǎn)子與旋轉(zhuǎn)磁場(chǎng)保持同步,轉(zhuǎn)子繞組將無法被旋轉(zhuǎn)磁場(chǎng)切割,感應(yīng)電流不會(huì)產(chǎn)生,轉(zhuǎn)子就不能保持勻速運(yùn)動(dòng)。
轉(zhuǎn)子繞組被旋轉(zhuǎn)磁場(chǎng)切割
(3)兩者之間的比較優(yōu)勢(shì)
由于永磁鐵材料價(jià)格昂貴,相比于異步伺服電機(jī),永磁式同步伺服電機(jī)的轉(zhuǎn)子的造價(jià)、維修費(fèi)用相對(duì)較高,且永磁體存在高溫退磁的風(fēng)險(xiǎn)。但也因?yàn)檗D(zhuǎn)子部分無需借助切割磁場(chǎng)獲得的感應(yīng)電流,永磁式同步伺服電機(jī)不需要考慮轉(zhuǎn)子銅耗(繞組電阻因發(fā)熱產(chǎn)生的損耗),且由永磁材料提供磁場(chǎng),功率密度高。
功率密度(計(jì)算公式:最大功率/電機(jī)體積或重量)衡量單位體積或重量產(chǎn)生的能量傳輸時(shí)間速率,電機(jī)功率越大且體積、質(zhì)量越小時(shí),功率密度越高。當(dāng)工業(yè)生產(chǎn)的空間有限時(shí),功率密度是重要的考慮因素。永磁同步交流電機(jī)的功率密度范圍在2左右,異步交流電機(jī)為0.3-1.0之間。隨著新型電機(jī)控制理論和稀土永磁材料的快速發(fā)展,永磁同步電機(jī)的體積和重量進(jìn)一步減小,性能也在持續(xù)提高。
03
編碼器
1、構(gòu)成
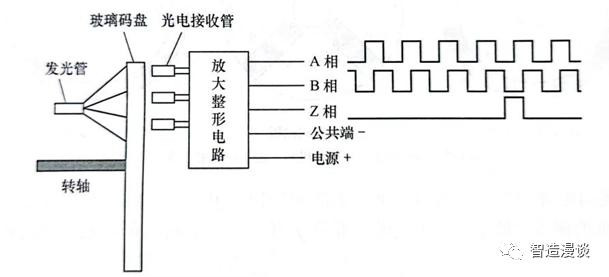
伺服電機(jī)編碼器主要由敏感元件、轉(zhuǎn)換元件和信號(hào)電路組成。編碼器的敏感元件由發(fā)光管和玻璃碼盤等部件組成,能將轉(zhuǎn)子轉(zhuǎn)軸的運(yùn)動(dòng)轉(zhuǎn)變?yōu)楣庑盘?hào);光電接收管即為轉(zhuǎn)換元件,能經(jīng)放大整形電流將光這一物理量轉(zhuǎn)變?yōu)殡娦盘?hào)。
2、工作原理
編碼器能夠檢測(cè)電機(jī)轉(zhuǎn)速和位置,實(shí)時(shí)發(fā)送反饋信號(hào)到伺服驅(qū)動(dòng)器,從而實(shí)現(xiàn)對(duì)伺服電機(jī)的閉環(huán)控制。因此,伺服電機(jī)的控制精確度很大程度取決于編碼器的精度。當(dāng)前廣泛使用的數(shù)字編碼器可以分為增量編碼器與絕對(duì)值編碼器兩種。
增量編碼器接在轉(zhuǎn)子轉(zhuǎn)軸上,每旋轉(zhuǎn)一定的角度或移動(dòng)一定的距離會(huì)產(chǎn)生一個(gè)脈沖,輸出脈沖隨著位移增加而不斷增多。以常用的光電編碼器為例,該編碼器主要由玻璃碼盤、發(fā)光管、光電接收管和整形電路組成,玻璃碼盤的結(jié)構(gòu)如下圖所示,黑色部分不透明,白色部分透明,可以通過光線,玻璃碼盤套在轉(zhuǎn)子中心的轉(zhuǎn)軸上,與伺服電機(jī)同步旋轉(zhuǎn)。編碼器的發(fā)光管發(fā)出光線照射玻璃碼盤,光線透過透明孔照射到光電接收管,從而得到脈沖,脈沖經(jīng)放大整形后輸出,反饋給伺服驅(qū)動(dòng)器。工作原理說明圖如下:

玻璃碼盤
編碼器旋轉(zhuǎn)一周產(chǎn)生的脈沖個(gè)數(shù)即分辨率。碼盤上刻出的透明孔越多,分辨率就越高。編碼器的分辨率越高,說明編碼器可讀取并輸出的電機(jī)最小角度就越小。
由于編碼器檢測(cè)電機(jī)的旋轉(zhuǎn)位移采用相對(duì)方式,若系統(tǒng)突然斷電,相對(duì)脈沖個(gè)數(shù)未儲(chǔ)存,再次通電后系統(tǒng)將無法知道執(zhí)行機(jī)構(gòu)的當(dāng)前位置,需要讓電機(jī)回到零位重新開始工作。絕對(duì)值編碼器解決了這一問題。以4位二進(jìn)制單圈絕對(duì)值編碼器的碼盤為例,該玻璃碼盤分為4個(gè)環(huán),每個(gè)環(huán)分成16等份,每個(gè)位置點(diǎn)都有唯一的編碼。通過編碼器輸出的代碼就能確定電動(dòng)機(jī)的當(dāng)前位置,輸出代碼的變化方向可以確定電動(dòng)機(jī)的轉(zhuǎn)向,如由0000往000[1][2] 1變化為正轉(zhuǎn),1100往0111變化為反轉(zhuǎn),通過檢測(cè)光電接收管產(chǎn)生的脈沖頻率就能確定電動(dòng)機(jī)的轉(zhuǎn)速。單圈絕對(duì)值編碼器定位不受斷電影響,再次通電后,編碼器當(dāng)前位置的編碼不變。

02
伺服電機(jī)的性能評(píng)價(jià)體系及產(chǎn)品對(duì)比
在選型時(shí),針對(duì)不同的應(yīng)用情境,對(duì)于伺服電機(jī)各項(xiàng)性能的考量也會(huì)有所不同。下面將對(duì)幾個(gè)常見的性能指標(biāo)作出說明:
01
額定轉(zhuǎn)矩
額定轉(zhuǎn)矩是電機(jī)在額定電壓、額定頻率下長(zhǎng)期工作軸上輸出的最大允許轉(zhuǎn)矩,決定了伺服電機(jī)能否持續(xù)以定額功率、定額電流、定額轉(zhuǎn)速輸出。額定轉(zhuǎn)矩越高,則電機(jī)的在一定電流比下的轉(zhuǎn)矩越大。
02
負(fù)載特性
負(fù)載特性是額定轉(zhuǎn)矩下電機(jī)持續(xù)負(fù)載運(yùn)行,同時(shí)峰值轉(zhuǎn)矩可滿足幾倍額定轉(zhuǎn)矩的短時(shí)指標(biāo)。負(fù)載特性越高,則伺服電機(jī)的過載能力越強(qiáng)。
02
編碼器分辨率
編碼器分辨率是指編碼器在伺服電機(jī)旋轉(zhuǎn)一圈所輸出的絕對(duì)位置,可以起到實(shí)時(shí)檢測(cè)伺服電機(jī)位置和速度的作用。編碼器的分辨率越高,伺服電機(jī)的最小刻度位置就越小,則伺服電機(jī)旋轉(zhuǎn)的角位移也就越小,控制的精度也就越高。
下表列出了幾款產(chǎn)品的指標(biāo)參數(shù):
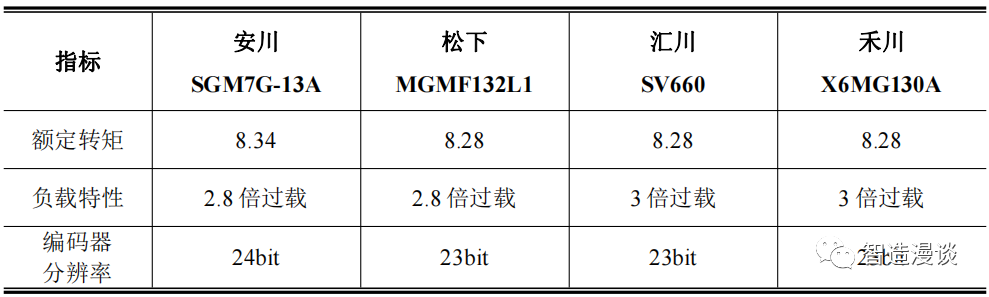
注:數(shù)據(jù)來源于禾川科技首次公開發(fā)行股票并在科創(chuàng)板上市招股說明書
除了上述指標(biāo)之外,伺服電機(jī)額定功率的大小、運(yùn)行噪音大小、體積與質(zhì)量等也常常成為選型時(shí)進(jìn)行比較的指標(biāo)。
除了上述指標(biāo)之外,伺服電機(jī)額定功率的大小、運(yùn)行噪音大小、體積與質(zhì)量等也常常成為選型時(shí)進(jìn)行比較的指標(biāo)。
03
伺服電機(jī)與步進(jìn)電機(jī)的對(duì)比
伺服電機(jī)與步進(jìn)電機(jī)都是當(dāng)前市面上常見的電機(jī)類型,但交流伺服在性能方面普遍優(yōu)于步進(jìn)電機(jī)。具體參數(shù)對(duì)比如下:

雖然在上述三個(gè)指標(biāo)中伺服電機(jī)表現(xiàn)更優(yōu),但步進(jìn)電機(jī)具有低價(jià)優(yōu)勢(shì)。一般來說,伺服電機(jī)的價(jià)格是步進(jìn)電機(jī)的 2-5 倍。
04
名詞解釋
1、漏電抗:漏電抗簡(jiǎn)稱漏抗是由漏磁通引起的。在電機(jī)的繞組中,通入電流,將產(chǎn)生磁通,根據(jù)磁通的路徑,可以分為主磁通和漏磁通兩部分。漏磁通則是只與產(chǎn)生它的繞組交鏈(只穿過產(chǎn)生它的繞組),漏磁通不起能量轉(zhuǎn)換、傳遞的作用,只產(chǎn)生自感電動(dòng)勢(shì),引起自感壓降。描述漏磁通可以用一個(gè)電抗表示,就是漏電抗。
2、轉(zhuǎn)矩:各種工作機(jī)械傳動(dòng)軸的基本載荷形式,與動(dòng)力機(jī)械的工作能力、能源消耗、效率、運(yùn)轉(zhuǎn)壽命及安全性能等因素緊密聯(lián)系,轉(zhuǎn)矩的測(cè)量對(duì)傳動(dòng)軸載荷的確定與控制、傳動(dòng)系統(tǒng)工作零件的強(qiáng)度設(shè)計(jì)以及原動(dòng)機(jī)容量的選擇等都具有重要的意義。
3、電磁轉(zhuǎn)矩:電磁轉(zhuǎn)矩是電動(dòng)機(jī)旋轉(zhuǎn)磁場(chǎng)各極磁通與轉(zhuǎn)子電流相互作用而在轉(zhuǎn)子上形成的旋轉(zhuǎn)力矩。是電動(dòng)機(jī)將電能轉(zhuǎn)換成機(jī)械能最重要的物理量之一。當(dāng)電樞繞組中有電樞電流流過時(shí),通電的電樞繞組在磁場(chǎng)中將受到電磁力,該力與電機(jī)電樞鐵心半徑之積稱為電磁轉(zhuǎn)矩。
4、負(fù)載:在物理學(xué)中指連接在電路中的兩端具有一定電勢(shì)差的電子元件,用于把電能轉(zhuǎn)換成其他形式的能的裝置;在電工學(xué)中指在電路中接收電能的設(shè)備,是各類用電器的總稱。
5、電機(jī)的機(jī)電時(shí)間常數(shù):機(jī)械時(shí)間常數(shù),是電動(dòng)機(jī)從啟動(dòng)到轉(zhuǎn)速達(dá)到空載轉(zhuǎn)速的63.2%時(shí)所經(jīng)歷的時(shí)間。
6、轉(zhuǎn)動(dòng)慣量:是剛體繞軸轉(zhuǎn)動(dòng)時(shí)慣性(回轉(zhuǎn)物體保持其勻速圓周運(yùn)動(dòng)或靜止的特性)的量度,用字母I或J表示。
7、功率因數(shù):功率因數(shù)是指交流電路有功功率對(duì)視在功率的比值。用戶電器設(shè)備在一定電壓和功率下,該值越高效益越好,發(fā)電設(shè)備越能充分利用。
8、脈沖當(dāng)量:當(dāng)控制器輸出一個(gè)定位控制脈沖時(shí),所產(chǎn)生的定位控制移動(dòng)的位移。對(duì)直線運(yùn)動(dòng)來說,是指移動(dòng)的距離,對(duì)圓周運(yùn)動(dòng)來說,是指其轉(zhuǎn)動(dòng)的角度。
審核編輯 :李倩
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6604瀏覽量
110576 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
572瀏覽量
39205
原文標(biāo)題:【行業(yè)深度 - 工控系統(tǒng)】聚焦伺服系統(tǒng)
文章出處:【微信號(hào):旺材伺服與運(yùn)動(dòng)控制,微信公眾號(hào):旺材伺服與運(yùn)動(dòng)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論