") 用于激光雷達(dá)的硅光子技術(shù)
用于激光雷達(dá)的硅光子技術(shù)
原創(chuàng):《半導(dǎo)體芯科技》雜志 10/11月刊
作者:Dongjae Shin, Kyoungho Ha, Hyuck Choo,三星先進(jìn)技術(shù)研究所
現(xiàn)代電子學(xué)和光子學(xué)大約始于二十世紀(jì)中葉,分別是晶體管和激光器的發(fā)明。由于互補(bǔ)金屬氧化物半導(dǎo)體(CMOS)技術(shù)的不斷發(fā)展,使晶體管發(fā)生了革命性的變化,幾十年來,微電子學(xué)一直是創(chuàng)造當(dāng)今通信和計算系統(tǒng)以及無數(shù)其他創(chuàng)新的基礎(chǔ)之一[1]。
另一方面,光子學(xué)的發(fā)展速度相對較慢,而且與微電子學(xué)相比,它仍然局限于多樣化但相對較小的利基領(lǐng)域。硅光子學(xué)(SiP)就是在這種情況下誕生的。人們對于以下兩點的興趣不斷升高,即:硅光子學(xué)是否能縮小這兩種技術(shù)之間的差距?能否通過將CMOS的生產(chǎn)力嫁接到光子學(xué)上來實現(xiàn)光子器件的商品化?[2]
隨著CMOS行業(yè)對SiP給予更多的技術(shù)關(guān)注,重要的是找到能夠彌補(bǔ)技術(shù)之間差距的“殺手級應(yīng)用”,以使之成為有利可圖的商業(yè)機(jī)會,因為假如沒有盈利潛力,任何技術(shù)都不會得到快速發(fā)展。本文介紹了三星先進(jìn)技術(shù)研究所(SAIT)在支持專為光探測和測距(LiDAR)傳感器設(shè)計的光子集成電路方面的近期研究。
為了解釋為什么LiDAR是眾多應(yīng)用中光子集成的最佳成長機(jī)會之一,大致了解一下三星的產(chǎn)品開發(fā)歷史是有幫助的。SiP最具代表性的任務(wù)之一是解決DRAM-CPU互連瓶頸問題,這個問題是經(jīng)典馮·諾依曼計算架構(gòu)眾所周知的致命弱點。2010年前后,三星積極地進(jìn)行了嘗試。考慮到DRAM的成本限制,通過將PIC直接集成到DRAM芯片中(如圖1(a)所示)的做法,證明了在DRAM和CPU之間實現(xiàn)光子互聯(lián)的可行性[3][4]。盡管取得了如此重大的成就,但是,這些嘗試也揭示了CMOS和光子學(xué)在技術(shù)成熟度上的巨大差異,并沒有促成后續(xù)的全面發(fā)展。從該經(jīng)驗中得到的教訓(xùn)之一是,將新興的PIC技術(shù)直接應(yīng)用于已經(jīng)成熟了很久的傳統(tǒng)應(yīng)用是非常困難的。因此,三星認(rèn)為PIC技術(shù)在許多情況下最適合新興應(yīng)用。
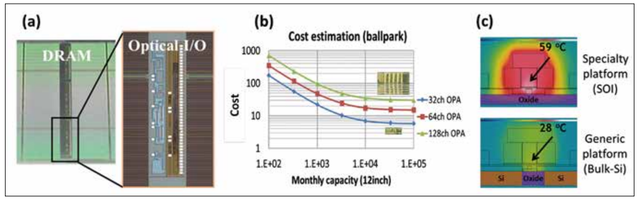
△圖1:(a)嵌入在65nm DRAM中的PIC。(b)LiDAR的估測產(chǎn)量-成本曲線。(c)通用平臺的熱力學(xué)優(yōu)勢。
在考慮的眾多新興應(yīng)用中,LiDAR被選中主要有三個原因。第一個原因是它可能有很高的產(chǎn)銷量。由于LiDAR在自動駕駛汽車、機(jī)器人和智能設(shè)備等各種應(yīng)用領(lǐng)域的需求量很高(或者將會很高),因此它很可能會達(dá)到證明實施CMOS大規(guī)模生產(chǎn)具有合理性的高產(chǎn)量。第二個原因是,從以摩爾定律為特征的CMOS演進(jìn)的角度來看,它的時機(jī)很好,而且它正朝著體積更小、速度更快、功耗更少、制備成本更低的器件不斷邁進(jìn)。LiDAR的廣泛部署由于其成本居高而被推遲,因此,如圖1(b)所示,從類似CMOS的生產(chǎn)工藝中獲得“產(chǎn)量增高-成本下降”的良性循環(huán)一直是LiDAR發(fā)展的一個迫切目標(biāo)。第三個原因是LiDAR與三星的PIC平臺有著良好的匹配。雖然硅光子行業(yè)的大多數(shù)廠商一直在基于各種專用襯底(如SOI)的平臺上開發(fā)PIC,但是,三星已經(jīng)在基于一種通用襯底的平臺上開發(fā)了面向傳統(tǒng)應(yīng)用的PIC,如圖1(c)所示[5]。由于硅的導(dǎo)熱性比氧化物高了大約100倍,因此三星的平臺可以提供更好的散熱效能,從而使其非常適合LiDAR應(yīng)用所需的熱敏激光器或放大器陣列。不過,該通用平臺暫時被擱置了,而專用平臺則用于研究目的。

在LiDAR領(lǐng)域,各種技術(shù)方案在性能和成本方面展開了競爭,而市場贏家目前仍不確定,特別是低端應(yīng)用。關(guān)于LiDAR架構(gòu)的大致共識是,最有可能勝出的是固態(tài)解決方案,而不是帶有活動部件的機(jī)械系統(tǒng)。在競爭中擁有優(yōu)勢的是不同技術(shù)的“整合”,而非“拼接”;不同角度的比較性探討正在積極地進(jìn)行之中。
通往優(yōu)化LiDAR解決方案的道路通常考慮三個最重要的視點:平面(XY)照明,軸向(Z)測距,以及波長,如圖2所示。照明通常采用閃光方案(flash scheme),同時對整個視場(FOV)進(jìn)行照明,而掃描方案則在包含F(xiàn)OV的每個方向上采用順序照明。通過利用現(xiàn)有的CMOS生態(tài)系統(tǒng),閃光方案已經(jīng)在短距離應(yīng)用中實現(xiàn)了商業(yè)化,而掃描方案則已在長距離無線電探測和測距(RADAR)應(yīng)用中得到了長期的證明。
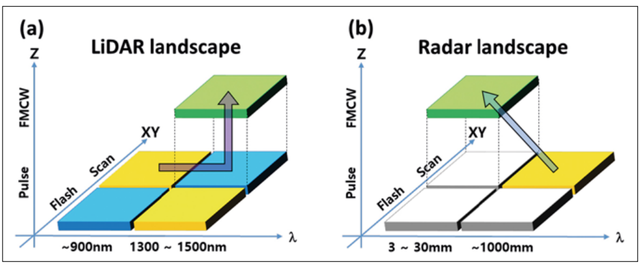
△圖2:LiDAR(a)和雷達(dá)(b)的技術(shù)狀況。
測距可能需要使用各種不同的方法,比如:飛行時間(TOF)方案發(fā)射短光脈沖,而頻率調(diào)制連續(xù)波(FMCW)方案則發(fā)射頻率調(diào)制光。考慮到雷達(dá)從TOF演進(jìn)到了FMCW,我們認(rèn)為LiDAR很有可能發(fā)生類似的技術(shù)演進(jìn)。
在波長方面,有兼容硅的~900nm波段和基于III/V族化合物半導(dǎo)體的1.3~1.5μm波段。從現(xiàn)有工業(yè)生態(tài)系統(tǒng)的角度來看,~900nm波段是有利的,但是,從人眼安全和抗環(huán)境光噪聲的角度來看,則1.3~1.5μm波段具備優(yōu)勢。SAIT一直在采用掃描方案和1.3μm波段,更注重長距離應(yīng)用;它正準(zhǔn)備從TOF向FMCW演進(jìn)。

正如在許多光子學(xué)應(yīng)用中受到推崇的那樣,為了最大限度地實現(xiàn)“產(chǎn)量增高-成本下降”的良性循環(huán),有必要將所有的光子器件集成在單顆芯片上。到目前為止,用于LiDAR發(fā)射器(Tx)的光子器件首先被集成到單顆芯片內(nèi),而接收器(Rx)光子器件則在消除了架構(gòu)上的不確定性后被集成。LiDAR Tx是一種光學(xué)相控陣(OPA),相當(dāng)于用于雷達(dá)的射頻相控天線陣列的光子版本。圖3從概念上說明了OPA芯片和主要的光子器件,如可調(diào)諧激光二極管(TLD)、半導(dǎo)體光放大器(SOA)、移相器(PS)和天線陣列。OPA通過總共36個SOA放大TLD的32路分離輸出,并利用32個移相器控制相位,從而減小了來自天線陣列的光束的擴(kuò)散角。接著,用移相器在水平方向上掃描光束,而用TLD在垂直方向上掃描光束,如圖3(d)和圖3(e)所示。TLD通過圖3(b)所示的兩個環(huán)形諧振器中的加熱器來控制激射波長。
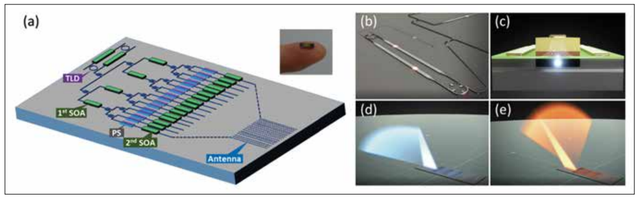
△圖3:(a)集成了TLD、SOA、PS和天線陣列的LiDAR芯片。(b)TLD平面結(jié)構(gòu)。(c)SOA垂直結(jié)構(gòu)。(d)在較低的仰角上用短波長進(jìn)行水平光束掃描。(e)在較高的仰角上用長波長進(jìn)行水平光束掃描。
在制備OPA時,采用的制程依次為硅工藝、硅基III-V族化合物半導(dǎo)體材料鍵合及III-V族化合物半導(dǎo)體工藝。這種硅基III-V族化合物半導(dǎo)體材料異質(zhì)集成對低成本制造是有利的,因為它簡化了后續(xù)的封裝。這項工作所使用的III-V族化合物半導(dǎo)體材料是由周期表中III族和V族的四種元素(如鋁、鎵、銦和砷)組合而成(生長在InP襯底上)。

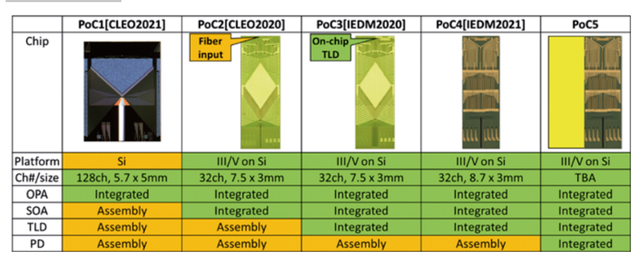
在邁向單芯片集成的過程中,迄今為止器件集成所取得的進(jìn)展匯總于圖4。從只集成了移相器和天線陣列(運用純硅工藝)的PoC1,到又集成了SOA的PoC2,再到進(jìn)一步集成了TLD的PoC3和PoC4組。這些PoC是通過硅基III-V族化合物半導(dǎo)體工藝制備的[6][7]。從PoC3到PoC4,電路的布局得到了改進(jìn),以減低片內(nèi)損耗和熱效應(yīng)[8][9]。具集成型光電二極管(PD)的PoC5也在考慮之中,但由于存在與一些LiDAR架構(gòu)問題有關(guān)的延遲,其集成化“仍在途中”。在PoC1中,使用相對簡單的純硅工藝,制備了具有128個天線的OPA,而從硅基III-V族化合物半導(dǎo)體工藝挑戰(zhàn)性較高的PoC2起,由于器件良率較低,因此制備的是具有32個天線的OPA。最佳的天線數(shù)量是作為性能-成本權(quán)衡折衷的一部分來確定的,預(yù)計會根據(jù)各種應(yīng)用所要求的探測距離而變化。
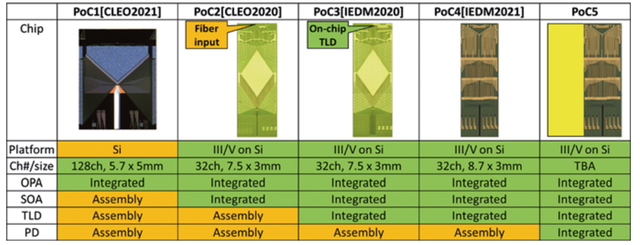
△圖4:LiDAR器件集成的進(jìn)展。
圖5總結(jié)了專為實現(xiàn)最佳LiDAR性能而設(shè)計的各種技術(shù)組合的成功。雖然PoC1組具有128個天線,分辨率還不錯,但是由于OPA輸出功率低和外部TLD速度慢,因此幀速率非常慢是不可避免的。在PoC2測試中,由于OPA的輸出功率通過SOA的集成得到了改善,每秒2幀的視頻記錄成為可能,不過由于天線數(shù)量的減少,分辨率有所降低。在PoC3測試中,由于額外集成了TLD,因此實現(xiàn)了每秒20幀的視頻記錄,并且通過數(shù)字信號處理(DSP)和圖像信號處理(ISP),使分辨率也得到了提高。在PoC4測試中,通過OPA的光學(xué)和熱學(xué)性能改進(jìn),增加了輸出功率,因而改善了探測范圍和FOV。目前正在努力優(yōu)化性能,以達(dá)到市場所要求的性能水平。特別地,如圖5所示,改善FOV是最緊迫的問題。
△圖5:LiDAR性能的進(jìn)步。
由于FOV和探測距離是相互關(guān)聯(lián)的,因此對FOV的改進(jìn)應(yīng)該伴隨著探測距離的改善。盡管TOF方法對于短距離應(yīng)用很可能是足夠的,但是,在長距離應(yīng)用中的效用則可能需要使用FMCW方法。因此,業(yè)界普遍認(rèn)為:相對復(fù)雜的FMCW的成本較低,而相對簡單的TOF的性能較高,這些對于LiDAR市場的初始分割將會是很重要的。

為了預(yù)測LiDAR的未來技術(shù)演進(jìn),有必要研究相關(guān)的先前技術(shù),比如那些對雷達(dá)和電信應(yīng)用的發(fā)展至關(guān)重要的技術(shù)。雷達(dá)的用途幾乎與LiDAR相同,并經(jīng)歷了100多年的技術(shù)發(fā)展。電信也使用了LiDAR常見的光學(xué)器件和模塊技術(shù),演進(jìn)歷史已超過50年。
圖6簡要總結(jié)了雷達(dá)和電信的主要演進(jìn)路徑。雷達(dá)在20世紀(jì)初開始使用TOF方法,由于高功率RF放大器的挑戰(zhàn),已經(jīng)發(fā)展到運用FMCW方案。FMCW雷達(dá)在20世紀(jì)70年代影響了電信技術(shù)的發(fā)展;當(dāng)時人們對類似FMCW的相干方案有著很高的興趣。
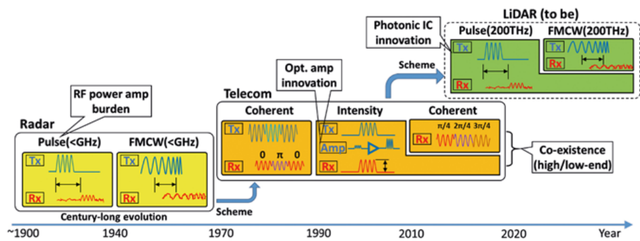
△圖6:從雷達(dá)和電信的演進(jìn)中獲得的啟示。
然而,由于基于光電的系統(tǒng)和眾所周知的光纖放大器的出現(xiàn),自20世紀(jì)90年代以來,電信市場一直被類似于TOF的強(qiáng)度方案(intensity schemes)所主導(dǎo)。從本世紀(jì)第一個十年開始,當(dāng)需要更多的性能改進(jìn)時,電信/數(shù)據(jù)通信應(yīng)用重新審視了一種相干方案,該方案現(xiàn)在與強(qiáng)度方案共存。這一演進(jìn)歷史的一個重要含義是,放大器技術(shù)對這些器件的發(fā)展方向和導(dǎo)致市場引入的開發(fā)時間安排產(chǎn)生了重大的影響,這種情況很可能會在LiDAR技術(shù)的演進(jìn)中再度出現(xiàn)。也就是說,TOF-FMCW過渡的時間選擇可以根據(jù)本文所述的基于SOA的分布式光放大技術(shù)的成功程度來確定。人們關(guān)注的焦點是這種技術(shù)的不確定性在未來的幾年里將對LiDAR技術(shù)的商業(yè)化產(chǎn)生怎樣的影響。
審核編輯 黃昊宇
-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3984瀏覽量
190054 -
硅光子
+關(guān)注
關(guān)注
6文章
87瀏覽量
14879
發(fā)布評論請先 登錄
相關(guān)推薦
使用單光子探測技術(shù)設(shè)計的數(shù)字混沌激光雷達(dá)系統(tǒng)

單光子激光雷達(dá):航空遙感技術(shù)的革命性突破

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)技術(shù)的發(fā)展趨勢
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
基于FPGA的激光雷達(dá)控制板

機(jī)載單光子激光雷達(dá)系統(tǒng)用于實現(xiàn)高分辨率3D成像

基于光子-電子集成回路的相干激光雷達(dá)引擎設(shè)計
硅基片上激光雷達(dá)技術(shù)綜述

硅基片上激光雷達(dá)的測距原理

歐洲汽車巨頭Stellantis投資FMCW激光雷達(dá)開發(fā)商SteerLight
激光雷達(dá)的探測技術(shù)介紹 機(jī)載激光雷達(dá)發(fā)展歷程

汽車激光雷達(dá):競爭格局和技術(shù)演進(jìn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論