 下方進行ABB機器人IRB1200轉數計數器操作方法
下方進行ABB機器人IRB1200轉數計數器操作方法
在以下情況需要對機械原點位置進行轉數計數器更新操作:
1.更換伺服電機轉數計數器電池后。
2.當轉數計數器發生故障,修復后。
3.轉數計數器與測量板之間斷開過以后
4.斷電后,機器人關節軸發生了位移。
5.當系統報警提示“10036轉數計數器未更新”時。
下方進行ABB機器人IRB1200轉數計數器操作方法
01
key:使用手動操縱讓機器人各關節軸運動到機械原點刻度位置的順序是:4—5—6—1—2—3。
機器人六個關節軸的機械原點刻度位置如下圖所示。

02
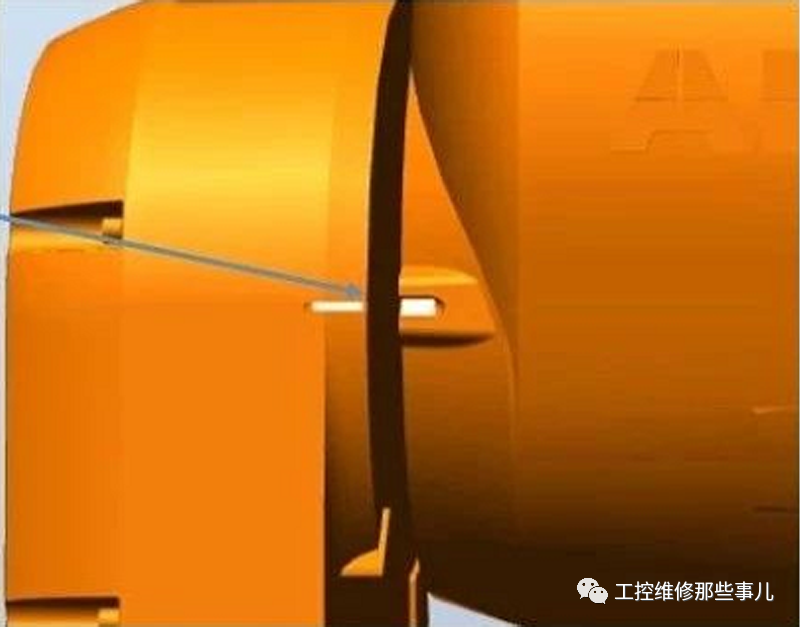
在手動操縱菜單中,動作模式選擇“軸4-6”,將關節軸4運動到機械原點的刻度位置(下圖箭頭所示)。

03
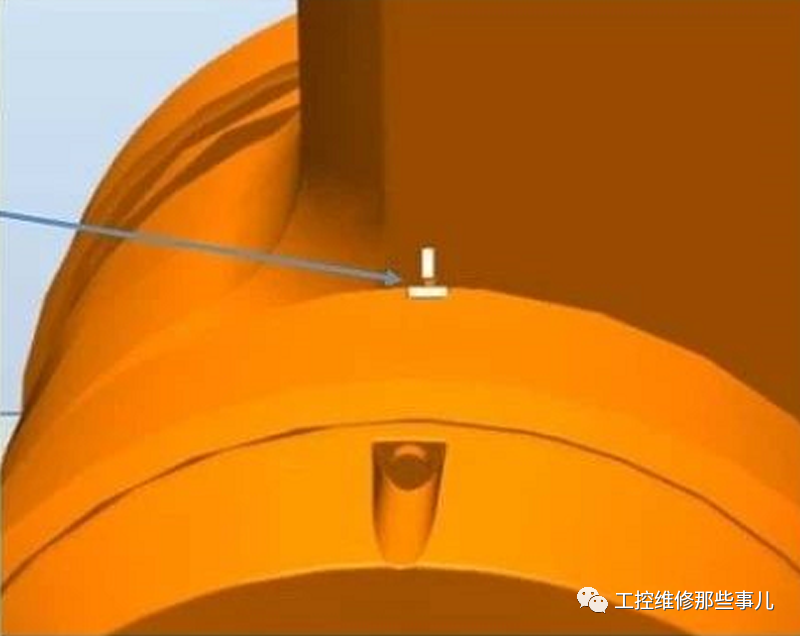
在手動操縱菜單中,動作模式選擇“軸4-6”,將關節軸5運動到機械原點的刻度位置(下圖箭頭所示)。

04
在手動操縱菜單中,動作模式選擇“軸4-6”,將關節軸6運動到機械原點的刻度位置(下圖箭頭所示)。
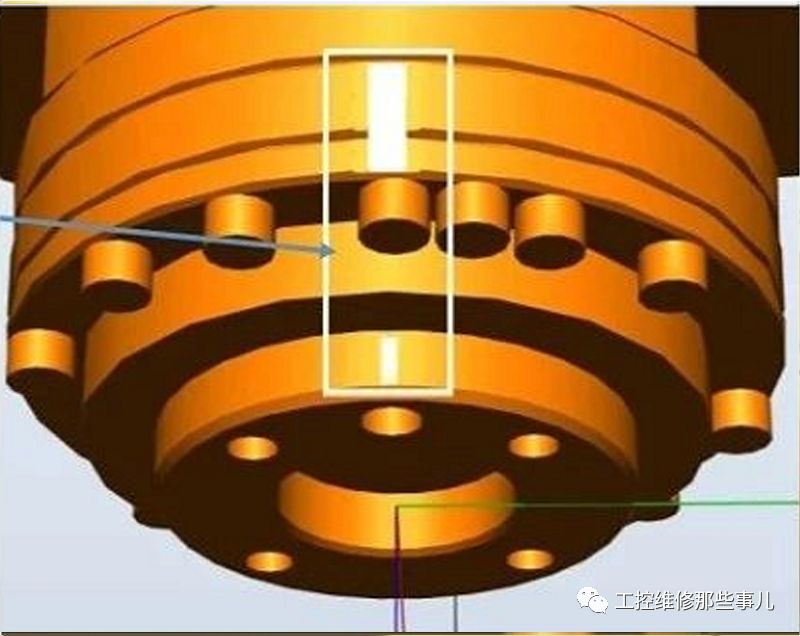
05
在手動操縱菜單中,動作模式選擇“軸4-6”,將關節軸1運動到機械原點的刻度位置(下圖箭頭所示)。

06
在手動操縱菜單中,動作模式選擇“軸4-6”,將關節軸2運動到機械原點的刻度位置(下圖箭頭所示)。
07
在手動操縱菜單中,動作模式選擇“軸4-6”,將關節軸3運動到機械原點的刻度位置(下圖箭頭所示)。
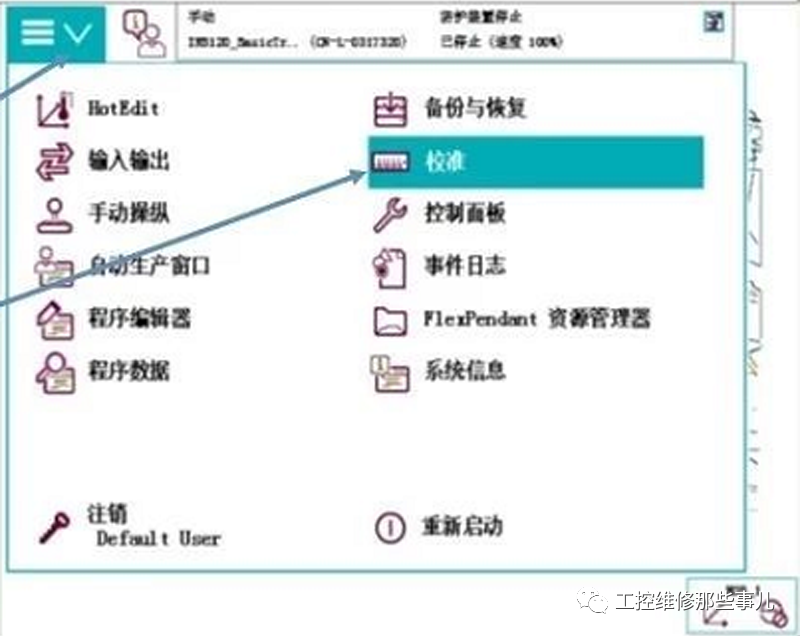
08
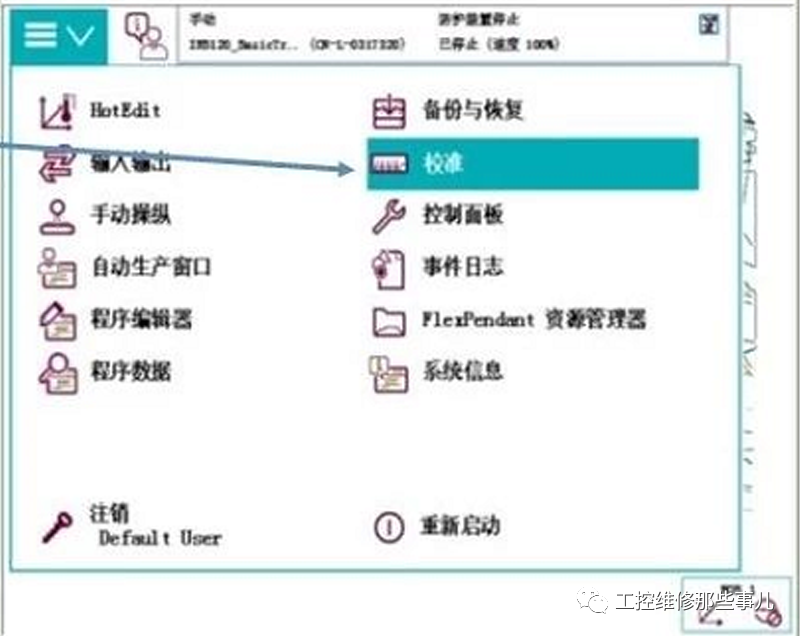
先點擊左上角的主菜單
然后選擇“校準”。
09
點擊“POB_01”

10
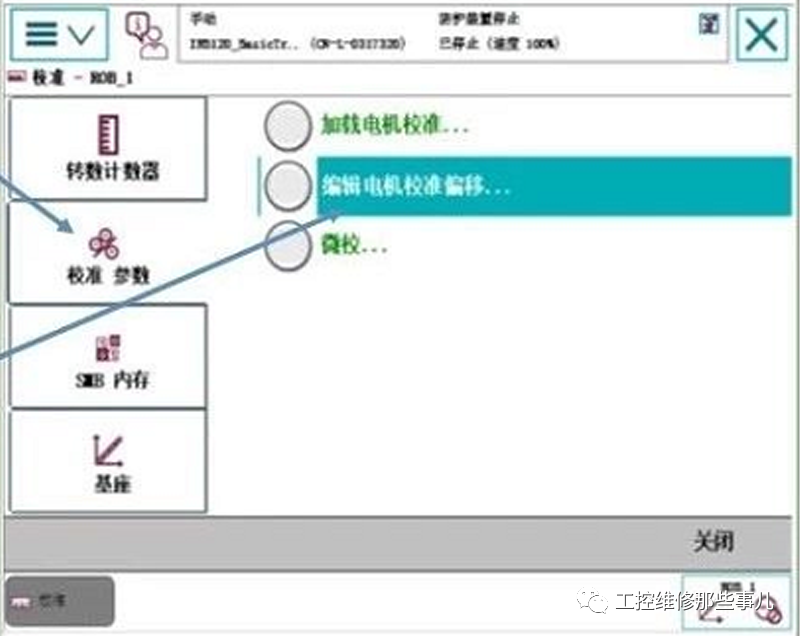
先選擇“校準參數”。
再選擇“編輯點擊校準偏移”。
11
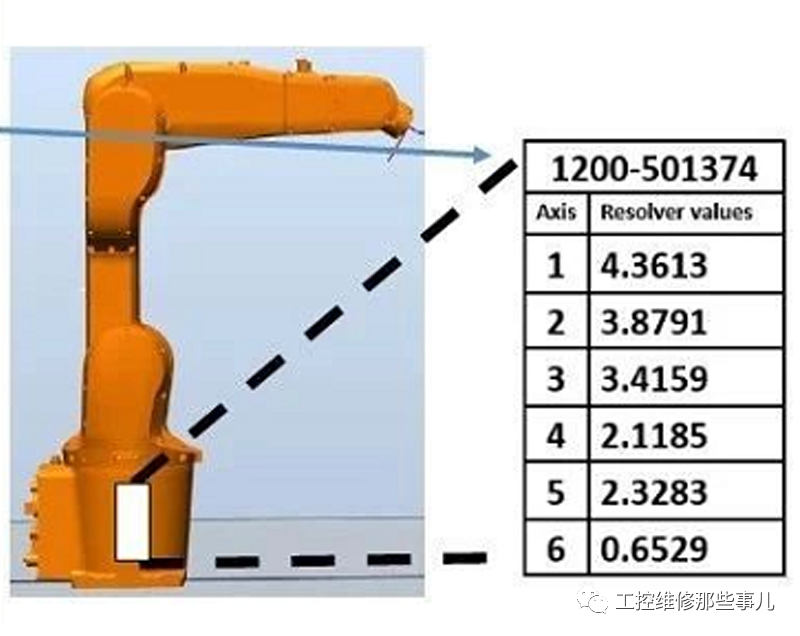
將機器人本體上電機校準偏移記錄下來,后面會用到。
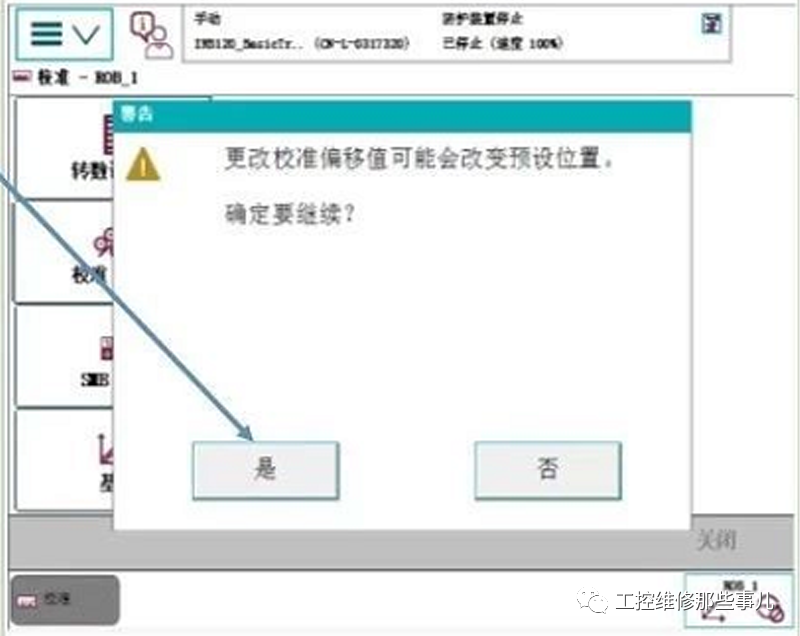
12
點擊“是”
13
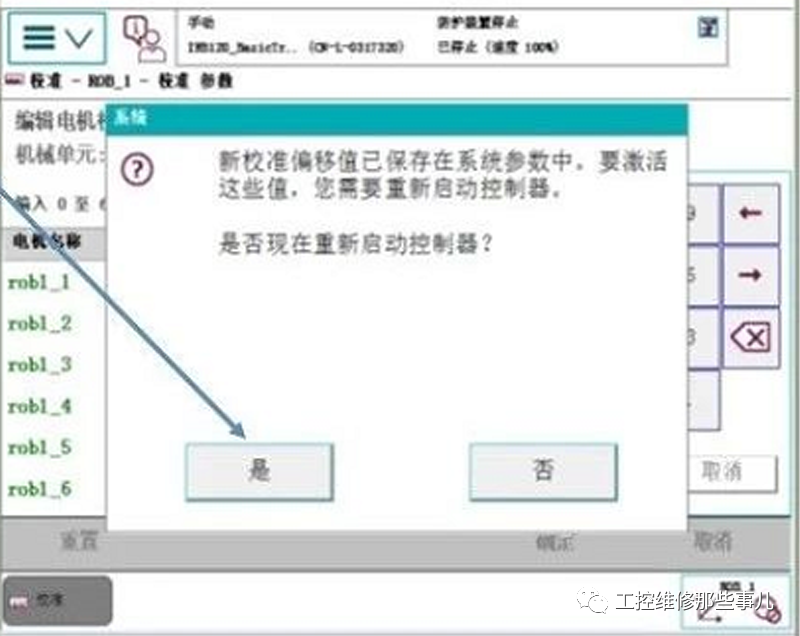
輸入剛才從機器人本體記錄的電機校準偏移數據,然后點擊“確定”。
如果示教器中顯示的數值與本體上的標簽數值相同,則不需修改,直接點擊“取消”退出,跳到第17步。

14
點擊“是”
15
重新啟動控制器后,點擊“校準”。
16
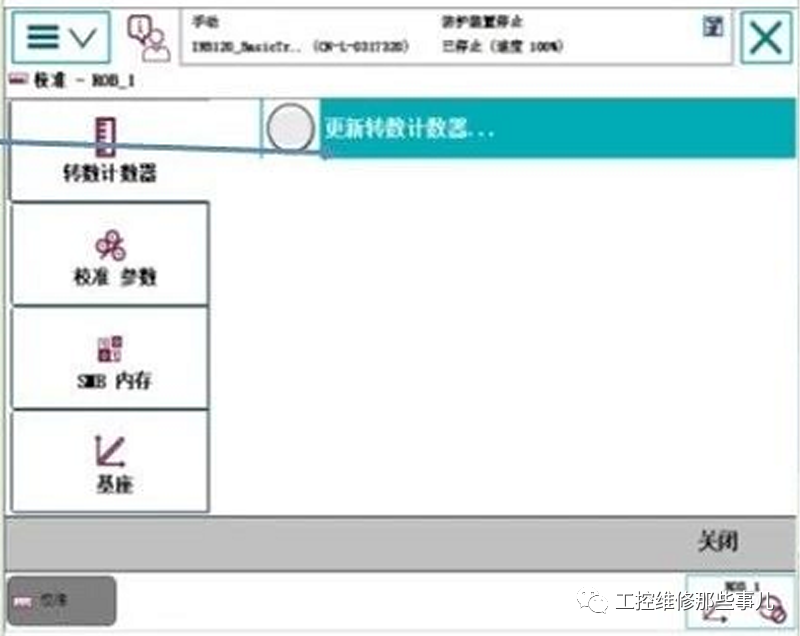
點擊“ROB_1”

17
點擊“更新轉數計數器”。
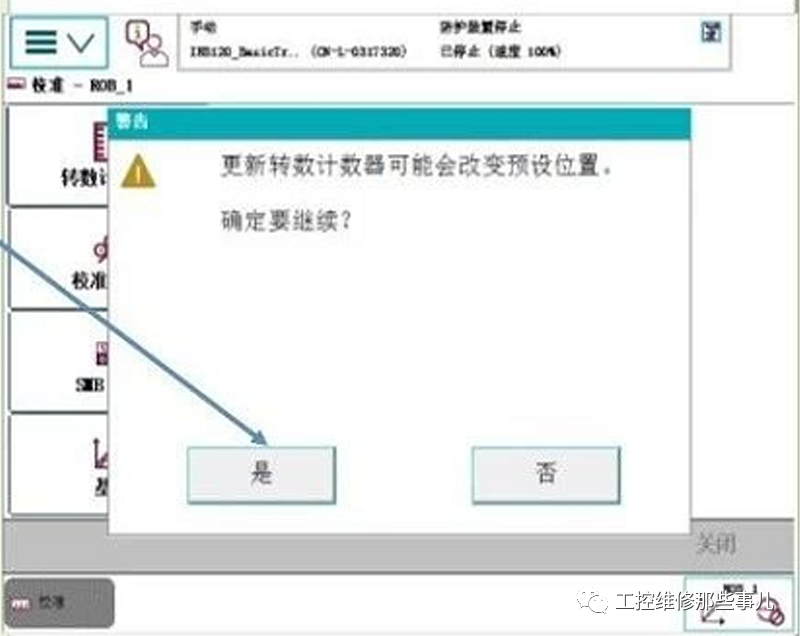
18
點擊“是”
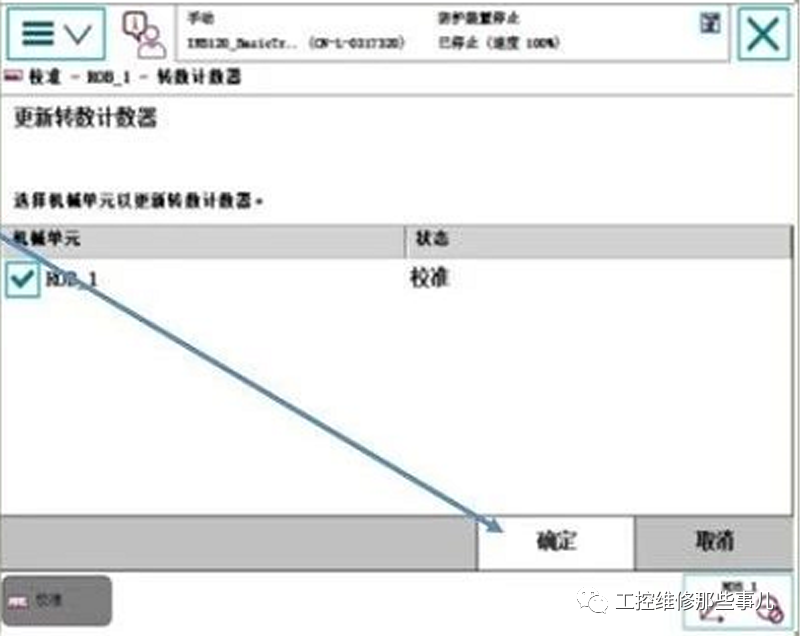
19
點擊“確認”。
20
key:如果機器人由于安裝位置的關系,無法六個軸同時到達機械原點刻度位置,則可以逐個對關節軸進行轉數計數器更新。
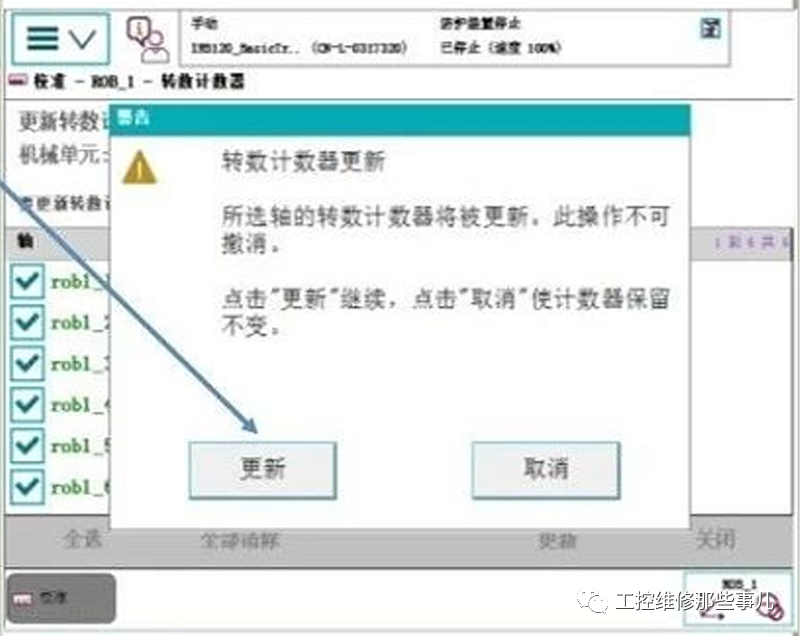
點擊“全選”,然后點擊“更新”。

21
點擊“跟新”。
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
機械
+關注
關注
8文章
1570瀏覽量
40523 -
計數器
+關注
關注
32文章
2256瀏覽量
94478
原文標題:下方進行ABB機器人IRB1200轉數計數器操作方法
文章出處:【微信號:pcb_repaired,微信公眾號:工控維修那些事兒】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
RobotStudio 6.08的手動操作方法






 工商網監
工商網監
評論