") BLDC電機(jī)控制算法和正弦整流換向分析
BLDC電機(jī)控制算法和正弦整流換向分析
無刷電機(jī)屬于自換流型(自我方向轉(zhuǎn)換),因此控制起來更加復(fù)雜。
BLDC電機(jī)控制要求了解電機(jī)進(jìn)行整流轉(zhuǎn)向的轉(zhuǎn)子位置和機(jī)制。對于閉環(huán)速度控制,有兩個附加要求,即對于轉(zhuǎn)子速度/或電機(jī)電流以及PWM信號進(jìn)行測量,以控制電機(jī)速度功率。
BLDC電機(jī)可以根據(jù)應(yīng)用要求采用邊排列或中心排列PWM信號。大多數(shù)應(yīng)用僅要求速度變化操作,將采用6個獨(dú)立的邊排列PWM信號。這就提供了最高的分辨率。如果應(yīng)用要求服務(wù)器定位、能耗制動或動力倒轉(zhuǎn),推薦使用補(bǔ)充的中心排列PWM信號。
為了感應(yīng)轉(zhuǎn)子位置,BLDC電機(jī)采用霍爾效應(yīng)傳感器來提供絕對定位感應(yīng)。這就導(dǎo)致了更多線的使用和更高的成本。無傳感器BLDC控制省去了對于霍爾傳感器的需要,而是采用電機(jī)的反電動勢(電動勢)來預(yù)測轉(zhuǎn)子位置。無傳感器控制對于像風(fēng)扇和泵這樣的低成本變速應(yīng)用至關(guān)重要。在采有BLDC電機(jī)時,冰箱和空調(diào)壓縮機(jī)也需要無傳感器控制。
空載時間的插入和補(bǔ)充
大多數(shù)BLDC電機(jī)不需要互補(bǔ)的PWM、空載時間插入或空載時間補(bǔ)償。可能會要求這些特性的BLDC應(yīng)用僅為高性能BLDC伺服電動機(jī)、正弦波激勵式BLDC電機(jī)、無刷AC、或PC同步電機(jī)。
控制算法
許多不同的控制算法都被用以提供對于BLDC電機(jī)的控制。典型地,將功率晶體管用作線性穩(wěn)壓器來控制電機(jī)電壓。當(dāng)驅(qū)動高功率電機(jī)時,這種方法并不實(shí)用。高功率電機(jī)必須采用PWM控制,并要求一個微控制器來提供起動和控制功能。
控制算法必須提供下列三項(xiàng)功能:
用于控制電機(jī)速度的PWM電壓
用于對電機(jī)進(jìn)整流換向的機(jī)制
利用反電動勢或霍爾傳感器來預(yù)測轉(zhuǎn)子位置的方法
脈沖寬度調(diào)制僅用于將可變電壓應(yīng)用到電機(jī)繞組。有效電壓與PWM占空度成正比。當(dāng)?shù)玫竭m當(dāng)?shù)恼鲹Q向時,BLDC的扭矩速度特性與以下直流電機(jī)相同。可以用可變電壓來控制電機(jī)的速度和可變轉(zhuǎn)矩。
功率晶體管的換向?qū)崿F(xiàn)了定子中的適當(dāng)繞組,可根據(jù)轉(zhuǎn)子位置生成最佳的轉(zhuǎn)矩。在一個BLDC電機(jī)中,MCU必須知道轉(zhuǎn)子的位置并能夠在恰當(dāng)?shù)臅r間進(jìn)行整流換向。
BLDC電機(jī)的梯形整流換向
對于直流無刷電機(jī)的最簡單的方法之一是采用所謂的梯形整流換向。
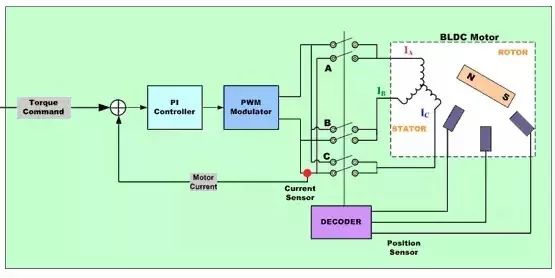
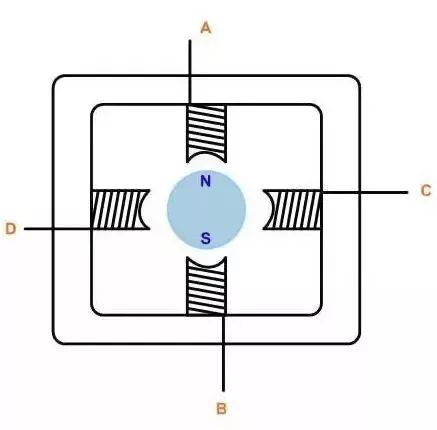
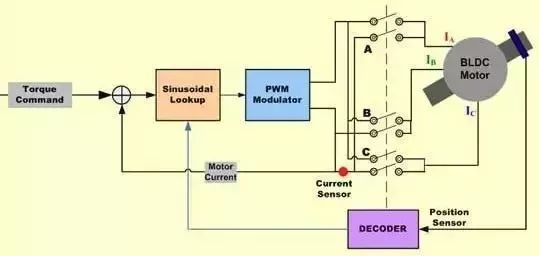
圖1:用于BLDC電機(jī)的梯形控制器的簡化框圖
在這個原理圖中,每一次要通過一對電機(jī)終端來控制電流,而第三個電機(jī)終端總是與電源電子性斷開。
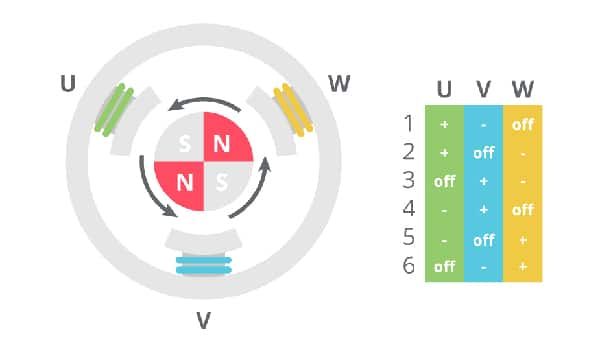
嵌入大電機(jī)中的三種霍爾器件用于提供數(shù)字信號,它們在60度的扇形區(qū)內(nèi)測量轉(zhuǎn)子位置,并在電機(jī)控制器上提供這些信息。由于每次兩個繞組上的電流量相等,而第三個繞組上的電流為零,這種方法僅能產(chǎn)生具有六個方向共中之一的電流空間矢量。隨著電機(jī)的轉(zhuǎn)向,電機(jī)終端的電流在每轉(zhuǎn)60度時,電開關(guān)一次(整流換向),因此電流空間矢量總是在90度相移的最接近30度的位置。
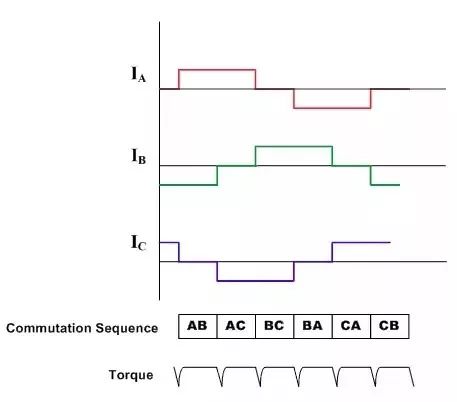
圖2:梯形控制:驅(qū)動波形和整流處的轉(zhuǎn)矩
因此每個繞組的電流波型為梯形,從零開始到正電流再到零然后再到負(fù)電流。
這就產(chǎn)生了電流空間矢量,當(dāng)它隨著轉(zhuǎn)子的旋轉(zhuǎn)在6個不同的方向上進(jìn)行步升時,它將接近平衡旋轉(zhuǎn)。
在像空調(diào)和冰箱這樣的電機(jī)應(yīng)用中,采用霍爾傳感器并不是一個不變的選擇。在非聯(lián)繞組中感應(yīng)的反電動勢傳感器可以用來取得相同的結(jié)果。
這種梯形驅(qū)動系統(tǒng)因其控制電路的簡易性而非常普通,但是它們在整流過程中卻要遭遇轉(zhuǎn)矩紋波問題。
BLDC電機(jī)的正弦整流換向
梯形整流換向還不足以為提供平衡、精準(zhǔn)的無刷直流電機(jī)控制。這主要是因?yàn)樵谝粋€三相無刷電機(jī)(帶有一個正統(tǒng)波反電動勢)中所產(chǎn)生的轉(zhuǎn)矩由下列等式來定義:
轉(zhuǎn)軸轉(zhuǎn)矩= Kt [IRSin(o) + ISSin(o+120) +ITSin(o+240)]
其中:
o為轉(zhuǎn)軸的電角度
Kt為電機(jī)的轉(zhuǎn)矩常數(shù)
IR, IS和IT為相位電流
如果相位電流是正弦的:IR = I0Sino; IS = I0Sin (+120o); IT = I0Sin (+240o)
將得到:轉(zhuǎn)軸轉(zhuǎn)矩= 1.5I0*Kt(一個獨(dú)立于轉(zhuǎn)軸角度的常數(shù))
正弦整流換向無刷電機(jī)控制器努力驅(qū)動三個電機(jī)繞組,其三路電流隨著電機(jī)轉(zhuǎn)動而平穩(wěn)的進(jìn)行正弦變化。選擇這些電流的相關(guān)相位,這樣它們將會產(chǎn)生平穩(wěn)的轉(zhuǎn)子電流空間矢量,方向是與轉(zhuǎn)子正交的方向,并具有不變量。這就消除了與北形轉(zhuǎn)向相關(guān)的轉(zhuǎn)矩紋波和轉(zhuǎn)向脈沖。
為了隨著電機(jī)的旋轉(zhuǎn),生成電機(jī)電流的平穩(wěn)的正弦波調(diào)制,就要求對于轉(zhuǎn)子位置有一個精確測量。霍爾器件僅提供了對于轉(zhuǎn)子位置的粗略計算,還不足以達(dá)到目的要求。基于這個原因,就要求從編碼器或相似器件發(fā)出角反饋。
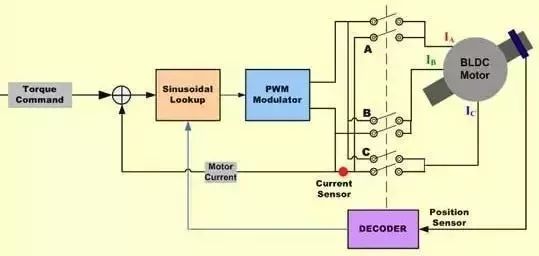
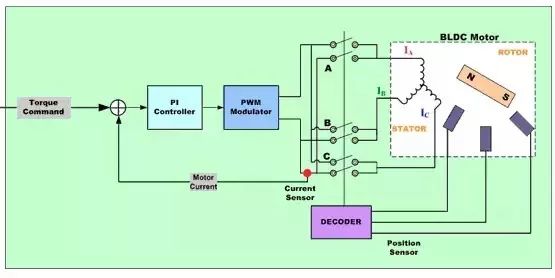
圖3:BLDC電機(jī)正弦波控制器的簡化框圖
由于繞組電流必須結(jié)合產(chǎn)生一個平穩(wěn)的常量轉(zhuǎn)子電流空間矢量,而且定子繞組的每個定位相距120度角,因此每個線組的電流必須是正弦的而且相移為120度。采用編碼器中的位置信息來對兩個正弦波進(jìn)行合成,兩個間的相移為120度。然后,將這些信號乘以轉(zhuǎn)矩命令,因此正弦波的振幅與所需要的轉(zhuǎn)矩成正比。結(jié)果,兩個正弦波電流命令得到恰當(dāng)?shù)亩ㄏ啵瑥亩谡环较虍a(chǎn)生轉(zhuǎn)動定子電流空間矢量。
正弦電流命令信號輸出一對在兩個適當(dāng)?shù)碾姍C(jī)繞組中調(diào)制電流的P-I控制器。第三個轉(zhuǎn)子繞組中的電流是受控繞組電流的負(fù)和,因此不能被分別控制。每個P-I控制器的輸出被送到一個PWM調(diào)制器,然后送到輸出橋和兩個電機(jī)終端。應(yīng)用到第三個電機(jī)終端的電壓源于應(yīng)用到前兩個線組的信號的負(fù)數(shù)和,適當(dāng)用于分別間隔120度的三個正弦電壓。
結(jié)果,實(shí)際輸出電流波型精確的跟蹤正弦電流命令信號,所得電流空間矢量平穩(wěn)轉(zhuǎn)動,在量上得以穩(wěn)定并以所需的方向定位。
一般通過梯形整流轉(zhuǎn)向,不能達(dá)到穩(wěn)定控制的正弦整流轉(zhuǎn)向結(jié)果。然而,由于其在低電機(jī)速度下效率很高,在高電機(jī)速度下將會分開。這是由于速度提高,電流回流控制器必須跟蹤一個增加頻率的正弦信號。同時,它們必須克服隨著速度提高在振幅和頻率下增加的電機(jī)的反電動勢。
由于P-I控制器具有有限增益和頻率響應(yīng),對于電流控制回路的時間變量干擾將引起相位滯后和電機(jī)電流中的增益誤差,速度越高,誤差越大。這將干擾電流空間矢量相對于轉(zhuǎn)子的方向,從而引起與正交方向產(chǎn)生位移。
當(dāng)產(chǎn)生這種情況時,通過一定量的電流可以產(chǎn)生較小的轉(zhuǎn)矩,因此需要更多的電流來保持轉(zhuǎn)矩。效率降低。
隨著速度的增加,這種降低將會延續(xù)。在某種程度上,電流的相位位移超過90度。當(dāng)產(chǎn)生這種情況時,轉(zhuǎn)矩減至為零。通過正弦的結(jié)合,上面這點(diǎn)的速度導(dǎo)致了負(fù)轉(zhuǎn)矩,因此也就無法實(shí)現(xiàn)。
AC電機(jī)控制算法
標(biāo)量控制
標(biāo)量控制(或V/Hz控制)是一個控制指令電機(jī)速度的簡單方法
指令電機(jī)的穩(wěn)態(tài)模型主要用于獲得技術(shù),因此瞬態(tài)性能是不可能實(shí)現(xiàn)的。系統(tǒng)不具有電流回路。為了控制電機(jī),三相電源只有在振幅和頻率上變化。
矢量控制或磁場定向控制
在電動機(jī)中的轉(zhuǎn)矩隨著定子和轉(zhuǎn)子磁場的功能而變化,并且當(dāng)兩個磁場互相正交時達(dá)到峰值。在基于標(biāo)量的控制中,兩個磁場間的角度顯著變化。
矢量控制設(shè)法在AC電機(jī)中再次創(chuàng)造正交關(guān)系。為了控制轉(zhuǎn)矩,各自從產(chǎn)生磁通量中生成電流,以實(shí)現(xiàn)DC機(jī)器的響應(yīng)性。
一個AC指令電機(jī)的矢量控制與一個單獨(dú)的勵磁DC電機(jī)控制相似。在一個DC電機(jī)中,由勵磁電流IF所產(chǎn)生的磁場能量ΦF與由電樞電流IA所產(chǎn)生的電樞磁通ΦA(chǔ)正交。這些磁場都經(jīng)過去耦并且相互間很穩(wěn)定。因此,當(dāng)電樞電流受控以控制轉(zhuǎn)矩時,磁場能量仍保持不受影響,并實(shí)現(xiàn)了更快的瞬態(tài)響應(yīng)。
三相AC電機(jī)的磁場定向控制(FOC)包括模仿DC電機(jī)的操作。所有受控變量都通過數(shù)學(xué)變換,被轉(zhuǎn)換到DC而非AC。其目標(biāo)的獨(dú)立的控制轉(zhuǎn)矩和磁通。
磁場定向控制(FOC)有兩種方法:
直接FOC: 轉(zhuǎn)子磁場的方向(Rotor flux angle) 是通過磁通觀測器直接計算得到的
間接FOC: 轉(zhuǎn)子磁場的方向(Rotor flux angle) 是通過對轉(zhuǎn)子速度和滑差(slip)的估算或測量而間接獲得的。
矢量控制要求了解轉(zhuǎn)子磁通的位置,并可以運(yùn)用終端電流和電壓(采用AC感應(yīng)電機(jī)的動態(tài)模型)的知識,通過高級算法來計算。然而從實(shí)現(xiàn)的角度看,對于計算資源的需求是至關(guān)重要的。
可以采用不同的方式來實(shí)現(xiàn)矢量控制算法。前饋技術(shù)、模型估算和自適應(yīng)控制技術(shù)都可用于增強(qiáng)響應(yīng)和穩(wěn)定性。
AC電機(jī)的矢量控制:深入了解
矢量控制算法的核心是兩個重要的轉(zhuǎn)換: Clark轉(zhuǎn)換,Park轉(zhuǎn)換和它們的逆運(yùn)算。采用Clark和Park轉(zhuǎn)換,帶來可以控制到轉(zhuǎn)子區(qū)域的轉(zhuǎn)子電流。這種做充許一個轉(zhuǎn)子控制系統(tǒng)決定應(yīng)供應(yīng)到轉(zhuǎn)子的電壓,以使動態(tài)變化負(fù)載下的轉(zhuǎn)矩最大化。
Clark轉(zhuǎn)換:Clark數(shù)學(xué)轉(zhuǎn)換將一個三相系統(tǒng)修改成兩個坐標(biāo)系統(tǒng):
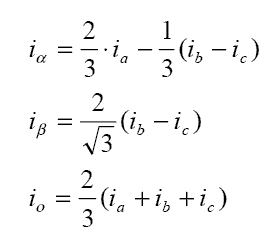
其中Ia和Ib正交基準(zhǔn)面的組成部分,Io是不重要的homoplanar部分
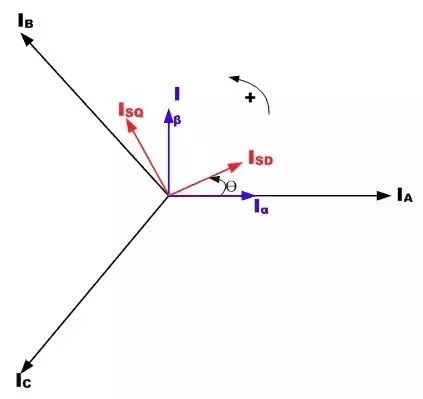
圖4:三相轉(zhuǎn)子電流與轉(zhuǎn)動參考系的關(guān)系
Park轉(zhuǎn)換:Park數(shù)學(xué)轉(zhuǎn)換將雙向靜態(tài)系統(tǒng)轉(zhuǎn)換成轉(zhuǎn)動系統(tǒng)矢量
兩相α, β幀表示通過Clarke轉(zhuǎn)換進(jìn)行計算,然后輸入到矢量轉(zhuǎn)動模塊,它在這里轉(zhuǎn)動角θ,以符合附著于轉(zhuǎn)子能量的d, q幀。根據(jù)上述公式,實(shí)現(xiàn)了角度θ的轉(zhuǎn)換。
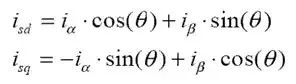
AC電機(jī)的磁場定向矢量控制的基本結(jié)構(gòu)
Clarke變換采用三相電流IA, IB 以及 IC,這兩個在固定座標(biāo)定子相中的電流被變換成Isd 和Isq,成為Park變換d, q中的元素。其通過電機(jī)通量模型來計算的電流Isd, Isq 以及瞬時流量角θ被用來計算交流感應(yīng)電機(jī)的電動扭矩。
圖2:矢量控制交流電機(jī)的基本原理
這些導(dǎo)出值與參考值相互比較,并由PI控制器更新。

基于矢量的電機(jī)控制的一個固有優(yōu)勢是,可以采用同一原理,選擇適合的數(shù)學(xué)模型去分別控制各種類型的AC, PM-AC 或者 BLDC電機(jī)。
BLDC電機(jī)的矢量控制
BLDC電機(jī)是磁場定向矢量控制的主要選擇。采用了FOC的無刷電機(jī)可以獲得更高的效率,最高效率可以達(dá)到95%,并且對電機(jī)在高速時也十分有效率。
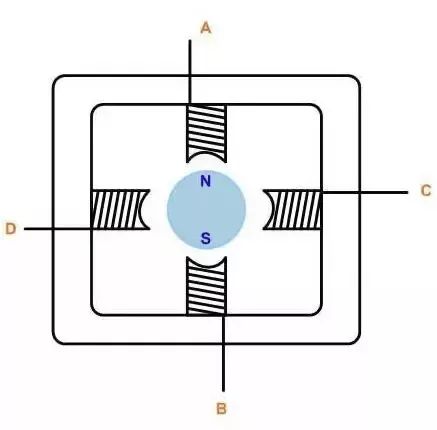
步進(jìn)電機(jī)控制通常采用雙向驅(qū)動電流,其電機(jī)步進(jìn)由按順序切換繞組來實(shí)現(xiàn)。通常這種步進(jìn)電機(jī)有3個驅(qū)動順序:
1.單相全步進(jìn)驅(qū)動:
在這種模式中,其繞組按如下順序加電,AB/CD/BA/DC (BA表示繞組AB的加電是反方向進(jìn)行的)。這一順序被稱為單相全步進(jìn)模式,或者波驅(qū)動模式。在任何一個時間,只有一相加電。
2.雙相全步進(jìn)驅(qū)動:
在這種模式中,雙相一起加電,因此,轉(zhuǎn)子總是在兩個極之間。此模式被稱為雙相全步進(jìn),這一模式是兩極電機(jī)的常態(tài)驅(qū)動順序,可輸出的扭矩最大。
3.半步進(jìn)模式:
這種模式將單相步進(jìn)和雙相步進(jìn)結(jié)合在一起加電:單相加電,然后雙相加電,然后單相加電…,因此,電機(jī)以半步進(jìn)增量運(yùn)轉(zhuǎn)。這一模式被稱為半步進(jìn)模式,其電機(jī)每個勵磁的有效步距角減少了一半,其輸出的扭矩也較低。
以上3種模式均可用于反方向轉(zhuǎn)動(逆時針方向),如果順序相反則不行。
通常,步進(jìn)電機(jī)具有多極,以便減小步距角,但是,繞組的數(shù)量和驅(qū)動順序是不變的。
通用DC電機(jī)控制算法
通用電機(jī)的速度控制,特別是采用2種電路的電機(jī):
相角控制
PWM斬波控制
相角控制
相角控制是通用電機(jī)速度控制的最簡單的方法。通過TRIAC的點(diǎn)弧角的變動來控制速度。相角控制是非常經(jīng)濟(jì)的解決方案,但是,效率不太高,易于電磁干擾(EMI)。
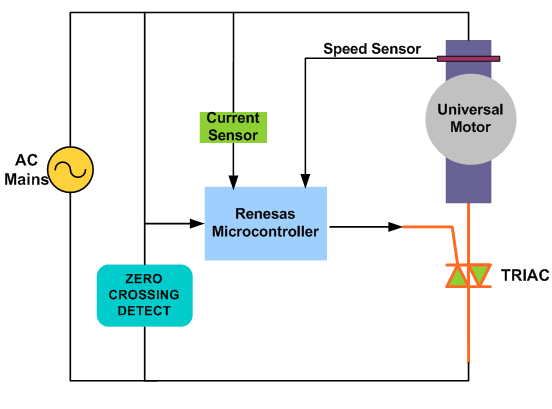
通用電機(jī)的相角控制
以上示圖表明了相角控制的機(jī)理,是TRIAC速度控制的典型應(yīng)用。TRIAC門脈沖的周相移動產(chǎn)生了有效率的電壓,從而產(chǎn)生了不同的電機(jī)速度,并且采用了過零交叉檢測電路,建立了時序參考,以延遲門脈沖。
PWM斬波控制
PWM控制是通用電機(jī)速度控制的,更先進(jìn)的解決方案。在這一解決方案中,功率MOFSET,或者IGBT接通高頻整流AC線電壓,進(jìn)而為電機(jī)產(chǎn)生隨時間變化的電壓。
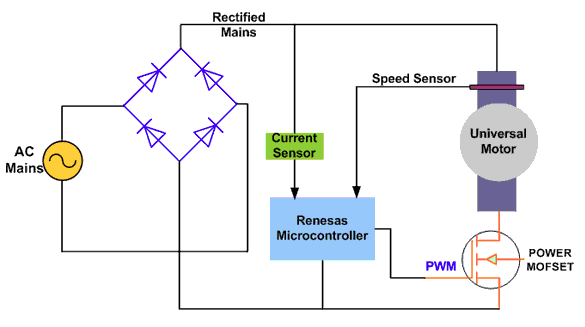
通用電機(jī)的PWM斬波控制
其開關(guān)頻率范圍一般為10-20 KHz,以消除噪聲。這一通用電機(jī)的控制方法可以獲得更佳的電流控制和更佳的EMI性能,因此,效率更高。
審核編輯:郭婷
-
電機(jī)
+關(guān)注
關(guān)注
142文章
9001瀏覽量
145337 -
BLDC
+關(guān)注
關(guān)注
206文章
800瀏覽量
96868
原文標(biāo)題:【干貨】最全面的電機(jī)控制總結(jié),收藏!
文章出處:【微信號:你身邊的機(jī)器人專家,微信公眾號:你身邊的機(jī)器人專家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
BLDC電機(jī)控制—梯形反電動勢BLDC電機(jī)控制技術(shù)
電動工具電機(jī)的塊換向與FOC控制解析

FOC電機(jī)與BLDC電機(jī)的比較
BLDC電機(jī)驅(qū)動電路圖 BLDC電機(jī)的工作原理和基本組成
電子換向器與直流電機(jī)有什么區(qū)別
bldc直流無刷電機(jī)怎么測量好壞呢
bldc電機(jī)和dd電機(jī)區(qū)別是什么
bldc變頻電機(jī)和fpa直驅(qū)變頻電機(jī)區(qū)別
bldc變頻電機(jī)是皮帶嗎 bldc電機(jī)是皮帶還是直驅(qū)
bldc變頻電機(jī)和直驅(qū)變頻電機(jī)區(qū)別與聯(lián)系是什么
一種更好的 BLDC 電機(jī)通信方法
BLDC電機(jī)的矢量控制介紹
BDLC電機(jī)的正弦整流換向介紹
BLDC電機(jī)的梯形整流換向





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論