一、什么是“關(guān)聯(lián)速度”問題
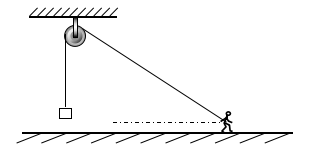
所謂“關(guān)聯(lián)速度”就是兩個通過某種方式聯(lián)系起來的速度。比如一根繩兩端的速度通過繩發(fā)生聯(lián)系。 如下圖所示,人通過跨過光滑定滑輪的輕繩拖動重物,人向右勻速運動,當繩與水平方向的夾角為θ角時,物塊上升的速度是多少。
二、已經(jīng)掌握的知識
1、兩個物體用不可伸長輕繩連接在一起,在水平面上運動,這兩個物體任何時刻速度相等。因為輕繩是理想化模型,不可發(fā)生明顯形變,所有任何一段時間兩物體的位移必相同,由此判定速度必相同,并且兩個物體的速度與繩上任意一點的速度都相同。

2、不可伸長的輕繩一端固定在天花板上,另一端連接小球,讓小球在豎直平面內(nèi)擺動,繩上各點的運動情況(線速度)就不同了,離懸點越遠的點線速度越大。
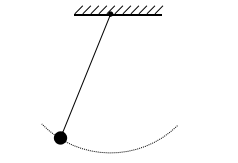
以上兩個實例告訴我們,同一繩子上各點的速度不一定相同。只有當繩子上各點都沿繩的方向運動時,各點的速度大小才相同,而當繩子繞點轉(zhuǎn)動時繩上各點的線速度大小不同。
三、可以這樣分解合速度
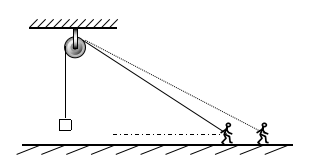
基于以上的前提知識,我們假設(shè)人站在原地不動,雙手收繩子而使物體上升,則物塊上升的速度與人收繩子的速度相等;假如人以滑輪為懸點,保持懸點到人手之間的繩長不變,在豎直平面內(nèi)轉(zhuǎn)動繩子,則物塊不會上升。也就是說,繩子的轉(zhuǎn)動不會改變物塊的速度,只有沿繩方向收繩子時物塊才會上升。
所以,當人運動拉繩時,繩子沿繩的方向運動,同時繞懸點旋轉(zhuǎn)。此時可以把人看做繩上的一個點,人的運動可以看作合運動,能分解為沿繩的方向的運動和繞懸點的轉(zhuǎn)動。物塊上升的速度與人的速度沿繩方向的分量大小相等,從而得出物塊的速度v 物 =v人cosθ。
四、也可以用“微元法”求解
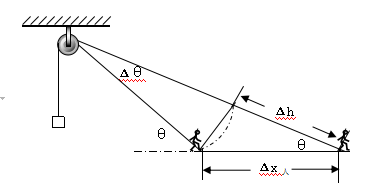
用數(shù)學方法更容易表述物理思想。取很短的時間Δt研究,在該時間內(nèi)人運動的位移
Δx 人 =V人Δt
由于Δt趨近于零,故繩子轉(zhuǎn)過的角度Δθ也趨近于零,物體上升的高度Δh
Δh=Δx人cosθ
而物體的速度可以這樣表示
v 物 =Δh /Δt
綜合以上關(guān)系式得到 v 物 =v人cosθ
這樣理解關(guān)聯(lián)速度是不是很容易?
審核編輯:劉清
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
相關(guān)推薦
orcad和allergo如何相互關(guān)聯(lián)
發(fā)表于 05-26 00:38
MATLAB\R2012a怎么關(guān)聯(lián)文件/
發(fā)表于 05-30 10:49
在浩辰CAD軟件中標注關(guān)聯(lián)就是標注跟圖形相關(guān)連,例如你捕捉一條直線的兩個端點進行標注,當你拖動直線的夾點改變直線的長度時,標注會自動跟隨變化。很顯然這樣可以提高編輯圖紙的效率,改了圖形不必重新
發(fā)表于 05-19 15:14
STM32的__main與main怎么關(guān)聯(lián)的
發(fā)表于 09-21 07:17
關(guān)聯(lián)規(guī)則的研究目前已經(jīng)能夠從含有缺失值的數(shù)據(jù)間建立關(guān)聯(lián)性,但缺失值填充的完整性仍顯不足。該文利用規(guī)則回收技術(shù),以回收組合的方法將已往在挖掘過程中被刪除掉的關(guān)聯(lián)
發(fā)表于 04-18 08:59
?8次下載
關(guān)聯(lián)挖掘的目的是從大量數(shù)據(jù)中發(fā)現(xiàn)對用戶有用、新穎、重要的關(guān)聯(lián)規(guī)則。傳統(tǒng)的關(guān)聯(lián)挖掘算法會產(chǎn)生大量對用戶而言顯而易見的平凡規(guī)則,使那些真正對用戶有用的新穎規(guī)則被
發(fā)表于 05-25 14:24
?15次下載
本文在針對關(guān)聯(lián)規(guī)則的Apriori 算法的基礎(chǔ)上,為了提高用戶數(shù)據(jù)挖掘的人機交互性能,解決關(guān)聯(lián)規(guī)則挖掘產(chǎn)生冗余規(guī)則的問題,提出了基于用戶導向的關(guān)聯(lián)規(guī)則挖掘方法SQL-IIAR 算法
發(fā)表于 08-26 11:41
?11次下載
關(guān)聯(lián)規(guī)則是數(shù)據(jù)挖掘研究的一個重要分支。Apriori算法是關(guān)聯(lián)規(guī)則挖掘中最有影響的經(jīng)典算法。本文在介紹了關(guān)聯(lián)規(guī)則的概念,在分析Apriori算法的基礎(chǔ)上提出一種基于劃分的Apriori改進算
發(fā)表于 05-13 16:37
?0次下載
數(shù)據(jù)挖掘( data mining)又稱做知識發(fā)現(xiàn)(knowledge disco-ver in database,KDD),其目的在于發(fā)現(xiàn)大量數(shù)據(jù)集中有價值的隱含信息。常見的數(shù)據(jù)挖掘任務(wù)有關(guān)聯(lián)規(guī)則
發(fā)表于 01-10 15:22
?1次下載
伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關(guān)聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內(nèi)。
![的頭像]() 發(fā)表于
發(fā)表于 09-27 15:05
?2350次閱讀
模糊航跡關(guān)聯(lián)算法在處理密集環(huán)境下以及機動航跡較多的濾波結(jié)果時,能夠表現(xiàn)出比基礎(chǔ)航跡關(guān)聯(lián)算法更理想的關(guān)聯(lián)效果。但當模糊因素集中因素數(shù)目較多且模糊因素權(quán)值分布相對均衡時,會使評價結(jié)果難以分辨、航跡
發(fā)表于 03-16 10:58
?6次下載
伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關(guān)聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內(nèi)。
![的頭像]() 發(fā)表于
發(fā)表于 11-04 15:00
?772次閱讀
數(shù)據(jù)挖掘中應(yīng)用較多的技術(shù)是機器學習。機器學習主流算法包括三種:關(guān)聯(lián)分析、分類分析、聚類分析。本文主要介紹關(guān)聯(lián)分析。
![的頭像]() 發(fā)表于
發(fā)表于 03-25 14:13
?1867次閱讀
伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關(guān)聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內(nèi)。
發(fā)表于 09-29 10:54
?593次閱讀

本文旨在探討電機速度變慢的原因,以及如何通過分析和解決這些問題來提高電機的性能。我們將從電機的基本原理、電氣系統(tǒng)、機械系統(tǒng)、環(huán)境因素等多個方面進行詳細分析。 一、引言 電機作為現(xiàn)代工業(yè)和日常生活中
![的頭像]() 發(fā)表于
發(fā)表于 06-05 11:21
?1617次閱讀
") 什么是關(guān)聯(lián)速度問題
什么是關(guān)聯(lián)速度問題





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論