 步進電機的結構、基本原理及應用分析
步進電機的結構、基本原理及應用分析
步進電機作為執行元件,是機電一體化的關鍵產品之一, 廣泛應用在各種自動化控制系統中。隨著微電子和計算機技術的發展,步進電機的需求量與日俱增,在各個國民經濟領域都有應用。作為電力人對步進電機的也不能僅限于認識而已,應該深入了解它的結構、基本原理以及應用,接下來將從三個方面帶大家全面認識步進電機。
PART1.
01什么是步進電機
步進電機是一種直接將電脈沖轉化為機械運動的機電裝置, 通過控制施加在電機線圈上的電脈沖順序、 頻率和數量, 可以實現對步進電機的轉向、 速度和旋轉角度的控制。在不借助帶位置感應的閉環反饋控制系統的情況下、 使用步進電機與其配套的驅動器共同組成的控制簡便、 低成本的開環控制系統, 就可以實現精確的位置和速度控制。
02基本結構和工作原理
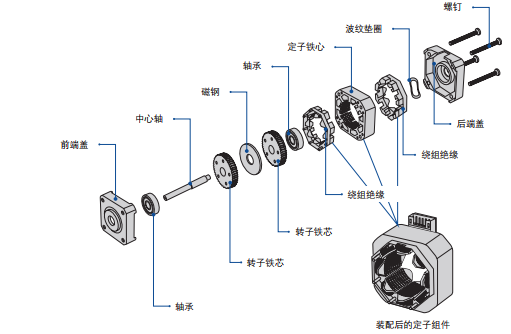
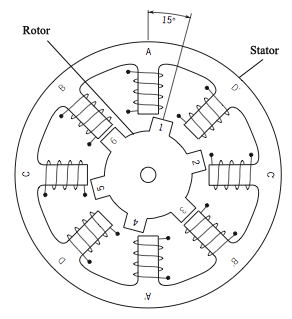
基本結構:
工作原理:
步進電機驅動器根據外來的控制脈沖和方向信號, 通過其內部的邏輯電路, 控制步進電機的繞組以一定的時序正向或反向通電, 使得電機正向/反向旋轉, 或者鎖定。 以1.8度兩相步進電機為例:當兩相繞組都通電勵磁時, 電機輸出軸將靜止并鎖定位置。在額定電流下使電機保持鎖定的最大力矩為保持力矩。如果其中一相繞組的電流發生了變向, 則電機將順著一個既定方向旋轉一步( 1.8度)。
同理, 如果是另外一項繞組的電流發生了變向, 則電機將順著與前者相反的方向旋轉一步( 1.8度)。當通過線圈繞組的電流按順序依次變向勵磁時, 則電機會順著既定的方向實現連續旋轉步進, 運行精度非常高。對于1.8度兩相步進電機旋轉一周需200步。 兩相步進電機有兩種繞組形式:雙極性和單極性。雙極性電機每相上只有一個繞組線圈, 電機連續旋轉時電流要在同一線圈內依次變向勵磁, 驅動電路設計上需要八個電子開關進行順序切換。
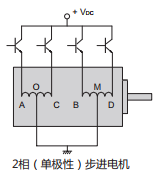
單極性電機每相上有兩個極性相反的繞組線圈, 電機連續旋轉時只要交替對同一相上的兩個繞組線圈進行通電勵磁。驅動電路設計上只需要四個電子開關。在雙極性驅動模式下, 因為每相的繞組線圈為100%勵磁, 所以雙極性驅動模式下電機的輸出力矩比單極性驅動模式下提高了約40%。 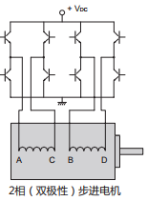
PART2.
01負載 A. 力矩負載(Tf)
Tf = G * rG:負載重量 r:半徑 B. 慣量負載(TJ)TJ = J * dw/dtJ = M * (R12+R22) / 2 (Kg * cm)M:負載質量 R1:外圈半徑 R2:內圈半徑 dω/dt:角加速度 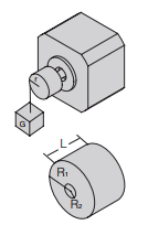 ?02?速度-力矩曲線? ? 速度-力矩曲線是步進電機輸出特性的重要表現形式。 ?
?02?速度-力矩曲線? ? 速度-力矩曲線是步進電機輸出特性的重要表現形式。 ?
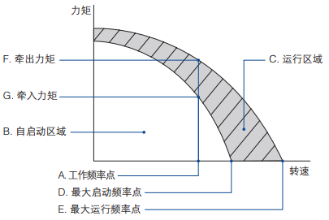
A. 工作頻率點
電機在某一點的轉速值。
n=q*Hz/(360*D)n: 轉/秒 Hz: 頻率值 D: 驅動電路細分值 q: 步距角 例如:距角1.8°的步進電機,在 1/2 細分驅動方式下(即每步0.9°),工作頻率 500Hz 時的轉速為1.25r/s. B. 自啟動區域
步進電機可以直接啟動和停止的區域。 C. 連續運行區域
在該區域內,電機無法直接啟動或停止。電機在該區域內運行必須先經過自啟動區域,然后經過加速達到該工作區域運行。同理,電機在該區域內也無法直接制動,否則容易造成電機失步,必須先經減速到達自啟動區域內再制動。 D. 最高啟動頻率
電機空載狀態下,保證電機不丟步運行的最大脈沖頻率。 E. 最高運行頻率
空載情況下,已勵磁電機運行而不丟步的最高脈沖頻率。 F. 啟動力矩/牽入力矩
滿足步進馬達在一定脈沖頻率下啟動并開始運行, 不失步的最大負載力矩。 G. 運行力矩/牽出力矩
滿足步進馬達在一定脈沖頻率下穩定運行,不失步的最大負載力矩。
03加速/減速運動控制 當電機運行頻率點在速度-力矩曲線的連續運行區域內時,如何縮短電機啟動或停止時的加速或減速時間,使電機更長時間地運行在最佳速度狀態,從而提高電機的有效運行時間是非常關鍵的。 如下圖所示,步進電機的動態力矩特性曲線,低速運行時曲線為水平直線狀態;高速運行時,由于受到電感的影響,曲線發生了指數下降。 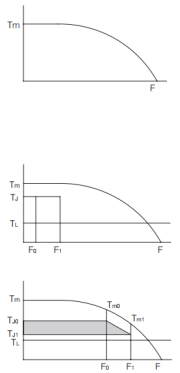 ?A.?低轉速狀態下的直線加速運行
?A.?低轉速狀態下的直線加速運行
已知電機負載為TL,假設想從F0在最短時間(t r)內加速到F1,如何來計算最短時間t r ?
(1)通常情況下TJ=70%Tm(2)tr=1.8*10-5*J*q*(F1-F0)/(TJ-TL)(3)F(t)=(F1-F0)*t/tr+F0,0
(1)通常情況下
TJ0=70%Tm0TJ1=70%Tm1TL=60%Tm1
(2)
tr=F4*In[(TJ0-TL)/(TJ1-TL)] (3)F (t) = F2 * [1 – e^(-t/F4)] + F0, 0
04振動與噪音 一般來講, 步進電機在空載運行情況下, 當電機的運行頻率接近或等于電機轉子的固有頻率時會發生共振,嚴重的會發生失步現象。
針對共振的幾種解決方案:
A. 避開振動區:使電機的工作頻率不落在振動范圍內
B. 采用細分的驅動模式:使用微步驅動模式, 將原來的一步細分為多步運行, 提高電機的每步分辨率, 從而降低振動。這可以通過調整電機的相電流比來實現的。微步并不會增加步距角精確度, 卻能使電機運行更加平穩, 噪音更小。一般電機在半步運行時, 力矩會比整步時小15%, 而采用正弦波電流控制時, 力矩將減小30%。
PART3.
01命名規則
03一般規格
04轉軸負載條件(單位:N)
免責聲明:本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,我們將根據您提供的證明材料確認版權并按國家標準支付稿酬或立即刪除內容!本文內容為原作者觀點,并不代表本公眾號贊同其觀點和對其真實性負責。
原文標題:電機講解丨步進電機
文章出處:【微信公眾號:電機技術及應用】歡迎添加關注!文章轉載請注明出處。
AM
17
HD
0
0
01
-
01
1
2
3
4
5
6
7
1
產業機器專用系列
2
機座號
電機外形尺寸 ( 機座尺寸為英制尺寸的 10 倍 )(6:14mm; 8:20 mm; 11:28mm; 14:35mm; 17:42mm; 23:56mm; 24:60mm;34:86mm; 42:110mm)
3
步距角代號
HY, HS, HD: 步距角 1.8°
4
鐵芯長度代號
5
引線數量
0: 表示插座式電機4: 引出線 4 根8: 引出線 8 根
6
性能代號
表示電機的電流,力矩等性能參數
7
機械代號
表示電機的出軸、引線、螺釘、剎車器及編碼器等機械參數-E1000D 編碼器型、 -PGXX 減速機型、 -BR01 永磁式制動器型
02接線圖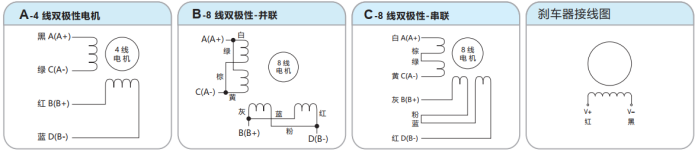
規格
電機部分
步距角精度
±5% ( 測試條件:恒流驅動器 /24V/ 兩相通電 / 額定電流 / 整步速度:1rps)
絕緣等級
B 級 (130°C)
使用環境(運行時)
環境溫度
-20 ~ +50°C ( 無結冰 )
環境濕度
85% 以下 ( 無結露 )
介質環境
無腐蝕性氣體及塵埃。不直接接觸水、 油等(標準型保護等級 IP65 規格:無腐蝕性氣體。不直接接觸油。)
溫度上升
溫升小于 80°C ( 溫升是指在一定環境溫度條件下, 線圈溫度增加的最大值。繞組溫度的測試采用電阻法。在恒壓驅動模式下,驅動電壓為額定電壓, 兩相通電, 轉速為 0pps。在恒流驅動模式下, 驅動電流為額定電流, 兩相通電, 轉速為空載起動頻率。散熱板:鋁板 160×160×t1.6(mm))
徑向跳動
0.050T.I.R.(mm)
徑向竄動
0.02mm Max.(500gf)
軸向竄動
0.08mm Max.(500gf)
安裝法蘭相對于轉軸的同軸度
0.075T.I.R.(mm)
安裝面相對于轉軸的垂直度
0.100T.I.R.(mm)
機座型號
允許徑向負載(距軸端的距離 L)
允許軸向負載
0mm
5mm
10mm
15mm
20mm
6HY
12
15
20
---
---
電機本身重量以下
8HY
12
15
20
---
---
11HS
20
25
34
52
---
14HS
20
25
34
52
---
17HD
20
25
34
52
---
23HS
50
60
75
100
150
24HS
61
73
90
110
160
34HD
260
290
340
390
480
42HS
390
435
510
585
720




-
線圈
+關注
關注
14文章
1831瀏覽量
44490 -
電機
+關注
關注
142文章
9028瀏覽量
145670 -
步進電機
+關注
關注
150文章
3112瀏覽量
147559
原文標題:電機講解丨步進電機
文章出處:【微信號:wwygzxcpj,微信公眾號:電機技術及應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
步進電機的控制技術及發展概況有哪些?
開關磁阻電機的基本原理、結構特點及控制策略
CNN模型的基本原理、結構、訓練過程及應用領域
卷積神經網絡的基本原理、結構及訓練過程
神經網絡的基本原理
什么是步進電機?步進電機的類型和結構





 工商網監
工商網監
評論