") 激光雷達和APD陣列的發(fā)展歷程及進展
激光雷達和APD陣列的發(fā)展歷程及進展
激光雷達(LiDAR)廣泛應(yīng)用于航天器導(dǎo)航、安防監(jiān)控、3D測繪、自動駕駛汽車、軍事裝備及機器人等領(lǐng)域,具有重要的軍事和民用價值。雪崩光電二極管(APD)陣列探測技術(shù)在激光雷達的發(fā)展過程中發(fā)揮著至關(guān)重要的作用。
據(jù)麥姆斯咨詢報道,近日,西南技術(shù)物理研究所的研究人員在《激光技術(shù)》期刊上發(fā)表了題為“APD陣列及其成像激光雷達系統(tǒng)的研究進展”的最新論文,首先介紹了激光雷達和APD陣列的應(yīng)用背景,其次綜述了APD陣列和激光雷達系統(tǒng)的發(fā)展歷程和最新進展,最后總結(jié)了APD陣列探測技術(shù)的發(fā)展前景和研究趨勢。
APD陣列國外研究現(xiàn)狀
APD探測器根據(jù)探測器的規(guī)模經(jīng)歷了單元、線列、小面陣到大面陣探測的發(fā)展歷程,受限于單元探測器的面積,其應(yīng)用存在諸多限制,但隨著壓縮感知理論的成熟和圖像處理算法的研究,單元探測技術(shù)仍然有應(yīng)用發(fā)展空間。APD線列、陣列探測器是目前激光雷達用探測器的主流發(fā)展方向之一,其主要由APD探測器件陣列和讀出電路(ROIC)兩部分構(gòu)成。外界環(huán)境噪聲的影響、APD陣列探測器像素單元的一致性、ROIC通道間的串?dāng)_是影響其性能和規(guī)模的關(guān)鍵因素。
線性模式APD陣列研究現(xiàn)狀
美國先進科學(xué)概念公司(ASC)基于線性模式的雪崩光電二極管陣列研制了TigerEYE和DragonEYE閃光激光雷達。
2012年,美國雷神公司為各種應(yīng)用開發(fā)了一系列高性能的脈沖激光雷達雪崩光電二極管陣列,如圖1所示,汞鎘汞紅外雪崩光電二極管陣列的尺寸包括32×2、10×10、2×128、64×48、4×256 和256×256。美國國家航空航天局自主精確著陸和危險探測回避技術(shù)項目所使用的雪崩探測器陣列是256×256雪崩探測器陣列,具有70%的量子效率。
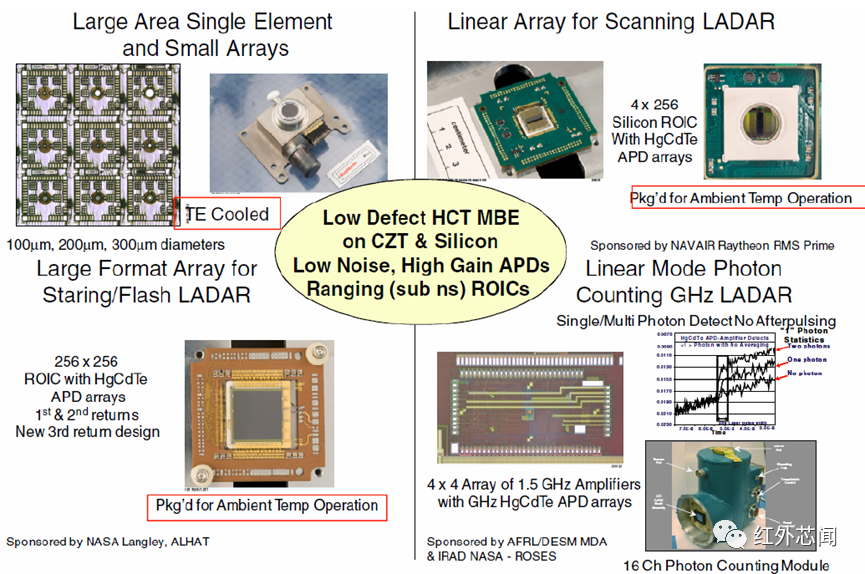
圖1 線性模式雪崩光電二極管陣列
2014年,美國DRS公司設(shè)計并制作了基于高密度垂直集成結(jié)構(gòu)的2×8線性模式HgCdTe APD陣列。該陣列可以探測從可見光到中頻中波紅外(MWIR)的光子。此外,還設(shè)計了用于近紅外門控主動/被動成像的128×128中波HgCdTeAPD陣列。該陣列的探測距離可達9公里,獲得了小于10光子的靈敏度。用CEA/LETI研制了一臺三維脈沖激光雷達,陣列長度為320×256,間距為30μm。能夠存儲每個像素中一個激光脈沖的TOF和強度。APD陣列在6V的低反向偏置電壓下,獲得了23的平均增益。探測距離超過40m,距離分辨率約為15cm。從三維視頻中提取的距離圖像如圖2所示。
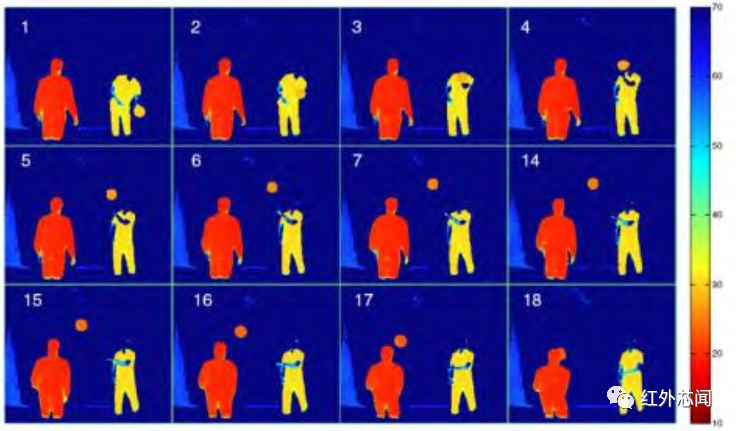
圖2 距離圖像序列
2019年,美國宇航局的孫曉麗、克雷蒙斯等人開發(fā)了一套線性模式單光計數(shù)HgCdTe APD焦平面陣列, HgCdTe APD陣列使用高密度垂直集成光電二極管架構(gòu),如圖3所示。集成探測器(含制冷器)組件的質(zhì)量為0.8kg,功耗7W左右,2×8像素HgCdTe APD FPA的尺寸為64μm×64μm,像素間距為 64μm,具有0.9~4.3μm波長的光譜響應(yīng),在250kHz的暗計數(shù)率下,光子探測效率高達70%,時間抖動<0.5ns。
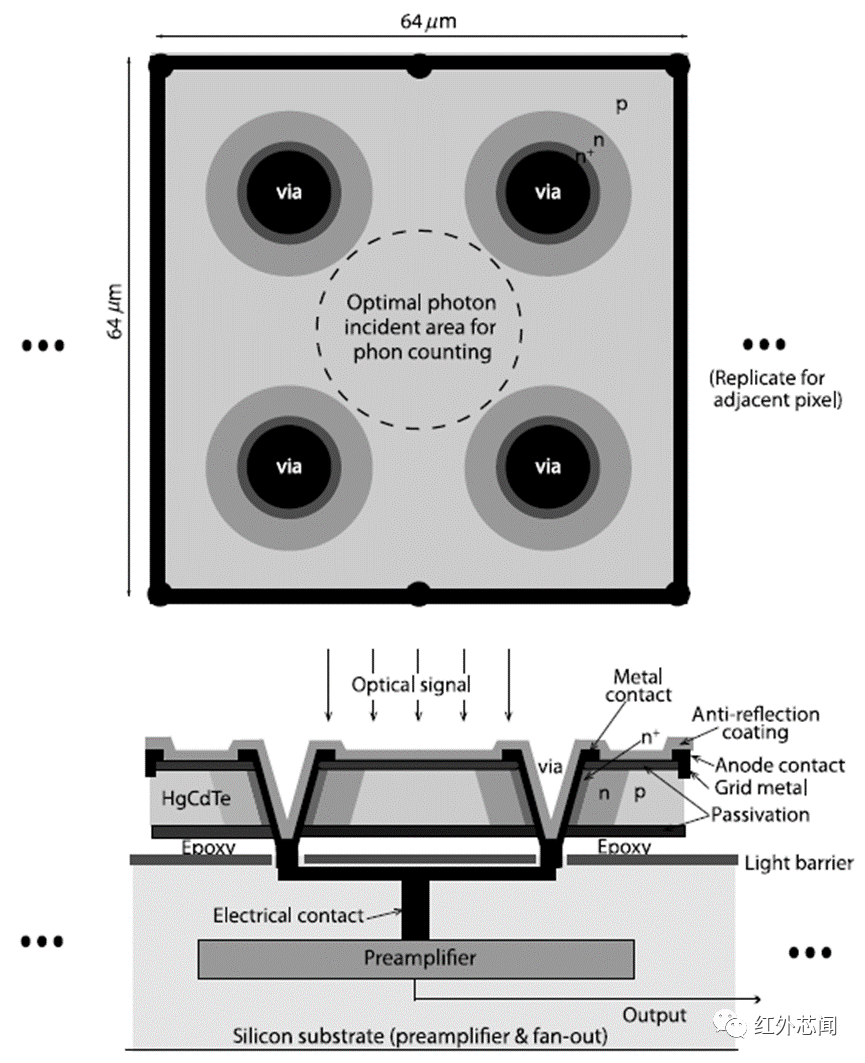
圖3HgCdTe APD的像素示意圖
2020年,美國宇航局蘭利研究中心的普拉薩德、納拉辛哈等人開發(fā)出一種創(chuàng)新的、非致冷的光子傳感集成電路(PSIC)異質(zhì)結(jié)光晶體管(HPT)器件。圖4展示了FPA的規(guī)格和集成的樣品,這種基于InGaAs的PSIC HPT設(shè)備是一種室溫檢測器和成像器,具有320×256規(guī)模和30μm尺寸的像素,并在0.9~1.7μm的短波紅外(SWIR)光譜區(qū)域工作。
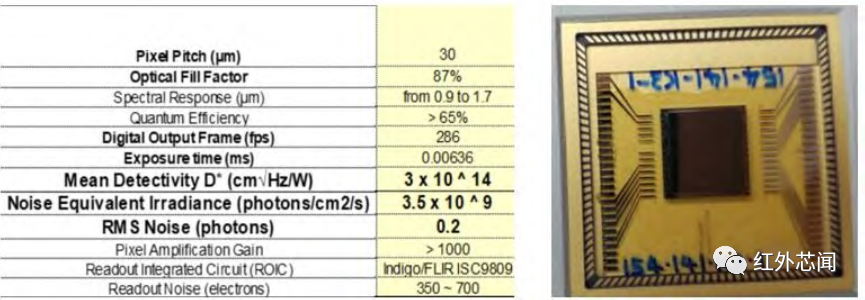
圖4 焦平面探測器規(guī)格和集成的樣品
2021年,美國宇航局的孫曉麗、克雷蒙斯、丹尼爾等人開發(fā)了一種新型太空激光雷達;它使用了2×8線性模式光子計數(shù)的HgCdTe雪崩光電二極管(APD)焦平面陣列探測器如圖5所示,提供了0.9~4.3μm波長的近量子限制的接收器靈敏度。通過調(diào)整激光功率和APD增益,可以提供六個數(shù)量級的動態(tài)范圍,能夠測量從數(shù)百公里到目標(biāo)表面附近的范圍和表面反射率。
蓋革模式APD陣列研究現(xiàn)狀
蓋革APD陣列可實現(xiàn)單光子探測的靈敏度,具有高的時間分辨率和距離分辨率,較高的探測效率,較低的功耗,體積小,增益高等特點,可以滿足遠距離高分辨率三維成像激光雷達的應(yīng)用需求。
1998-2003年林肯實驗室采用混合集成技術(shù)連續(xù)研制了GEN-I、GEN-II、GENIⅡ激光雷達。如圖6所示,GEN-III將32×32 APD陣列和32×32 CMOS計時電路陣列混合集成。2010年,該實驗室采用32×128的InP/InGaAsP蓋革APD陣列研制出機載三維成像激光雷達,能夠全天時在3km高空對地面進行2000km2/h的快速三維成像,距離精度為0.3m。2015年,該實驗室研究出近紅外波段響應(yīng)性能更佳的256像元×256像元InP/InGaAs-APD陣列。
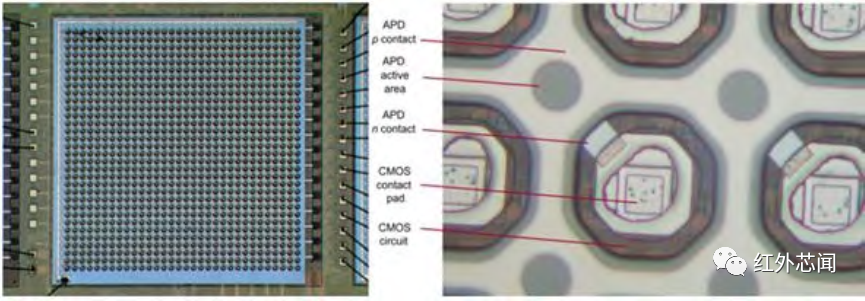
圖6 混合集成APD/CMOS器件的顯微照片
2014年,瑞士洛桑聯(lián)邦理工大學(xué)報道了一種基于0.18μm CMOS工藝的202像元×96像元SPAD陣列片上系統(tǒng)(SOC)探測器。在強太陽背景光下以10幀/秒的速度在100米范圍內(nèi)獲得了實時、準(zhǔn)確的距離圖像,分辨率為202像素×96像素。圖7左展示了它的系統(tǒng)芯片架構(gòu),圖7中為探測器的芯片照片,圖7右最上面部分為顏色編碼TOF距離成像,中間部分為信號穩(wěn)定性測量結(jié)果,最下面為攝像頭拍出的照片,可以清晰辨別出圖中的人物和車子。
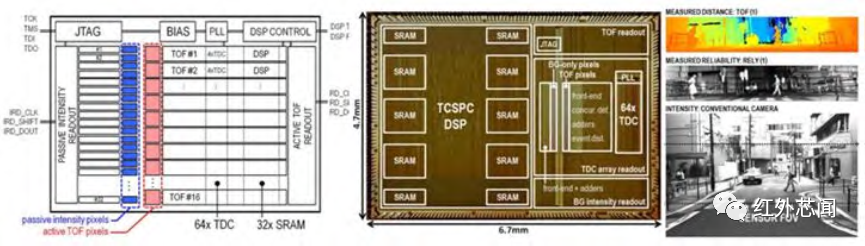
圖7 SOC探測器
2019年,英國的愛丁堡大學(xué)的山姆·哈欽斯等人報道了一種集成在三維疊層90nm 1P4M/40nm 1P8M工藝中的256×256單光子雪崩二極管(SPAD)傳感器,如圖8所示,用于LiDAR或高速直接TOF三維成像。傳感器底層由64×64個間距為36.72μm的模塊化光子處理單元組成,這些單元由共享的4×4個SPAD以9.18μm的間距和51%的填充系數(shù)運行。
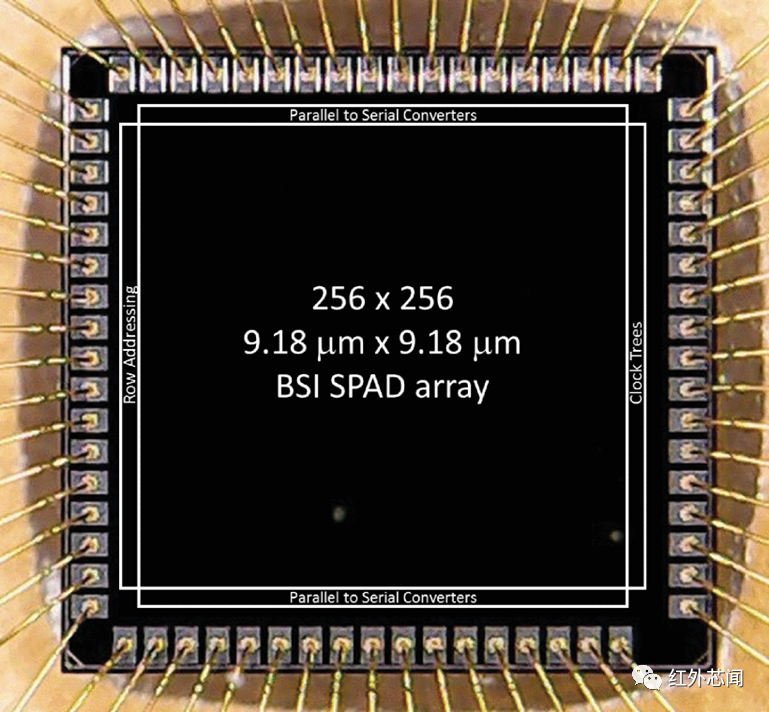
圖8 陣列照片
2020年,美國Acqubit的袁平等人開發(fā)了一種具有襯底去除結(jié)構(gòu)的GaAs基InGaP雪崩光電二極管,制作了32Gm×32Gm APD陣列,并與ROIC進行了集成,芯片尺寸約為3.75mm×3.75mm,比顯微鏡的正常視場(FOV)大。在室溫下,在50μm器件上測得的暗電流小于10pA。在532nm處,AR涂層器件的外部量子效率約為54%。圖9展示了它的焦平面圖片。
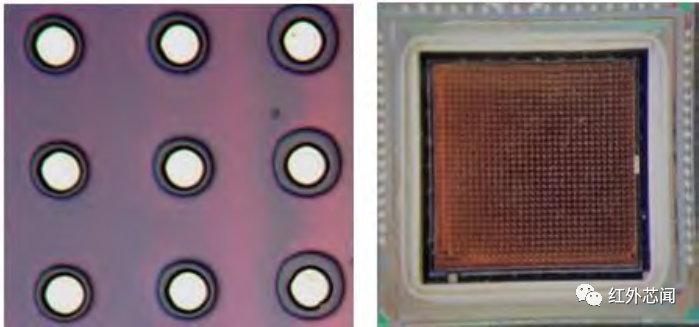
圖9 32×32陣列和焦平面
2022年,瑞士洛桑聯(lián)邦理工學(xué)院工程學(xué)院的趙久軒等人提出了一種基于標(biāo)準(zhǔn) 55nm Bipolar-CMOS-DMOS (BCD) 技術(shù)的模擬硅光電倍增管(SiPM),并且將SiPM集成到帶有時間相關(guān)單光子計數(shù)(TCSPC)模塊的同軸LiDAR系統(tǒng)中。SiPM由16×16 SPAD組成,尺寸為0.29mm×0.32mm。每個SPAD單元由一個3.3V的單片集成MOS管被動熄滅,在5V偏置電壓下測得的增益為 3.4×10?。在3.3V偏置電壓下,單光子計時分辨率為185ps,多光子計時分辨率為120ps。在室內(nèi)環(huán)境光條件下,25m距離測量時的精度為2cm和2mm。如圖10所示,在同軸掃描的情況下,128×256和256×512分辨率的復(fù)雜場景的強度和深度圖像。
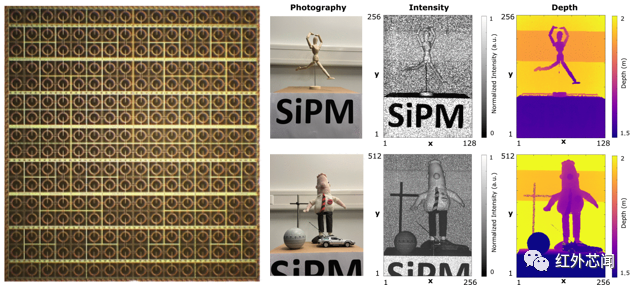
圖10 SiPM陣列圖和深度強度圖像
APD陣列國內(nèi)研究現(xiàn)狀
線性APD陣列研究現(xiàn)狀
2016年,南京大學(xué)開發(fā)了一種新型的激光雷達系統(tǒng),該系統(tǒng)使用4個線性模式APD探測器。利用調(diào)制和多路復(fù)用技術(shù),僅利用1×4個線性模式APD探即可實現(xiàn)每幀256個像素的檢測,脈沖激光閃光激光雷達的橫向分辨率約為15cm,測距精度約為4cm。
2018年,中國西南技術(shù)物理研究所研制了一種64×64線性模式InGaAs/InP 雪崩光電二極管陣列 ,與專用CMOS集成電路通過In柱倒裝互聯(lián)工藝混合集成的方式形成了LMAPD-FPA器件。該陣列的最小探測功率為400nW,讀出電路的時間分辨率為1ns。脈沖激光波長為1064nm,脈寬為5ns,單脈沖能量為100mJ,重復(fù)頻率為20Hz。檢測范圍為1公里,精度為15厘米。
2018年,北京理工大學(xué)提出了一種受復(fù)眼和人眼啟發(fā)的新型脈沖激光三維成像系統(tǒng)如圖11所示。接收光學(xué)系統(tǒng)由18×30個微透鏡組成,分布在曲面上,模擬復(fù)眼的大視場特征,整個視場達到52°。
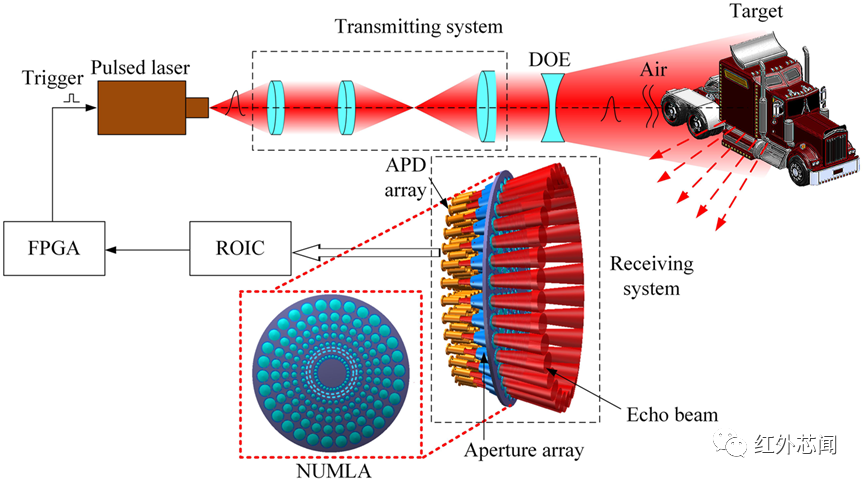
圖11 北京理工大學(xué)研制的脈沖激光閃光激光雷達原理圖
2020年,重慶光電技術(shù)研究所設(shè)計了128×2線性模式硅基雪崩光電二極管陣列。讀出電路采用單片集成技術(shù),將前置放大電路、TDC計時電路和ADC等功能模塊集成在單一硅片上。整個線性模式APD焦平面探測器可實現(xiàn)128×2 陣列規(guī)模的激光信號并行檢測。最小時間分辨率可達0.25ns,APD焦平面探測器的非均勻性為7%,串?dāng)_為0.15%。
蓋革模式APD陣列研究現(xiàn)狀
2016年,哈爾濱工業(yè)大學(xué)研制的閃光激光雷達采用第四十四研究所研制出的 32像元×32像元的InGaAsGm-APD焦平 面 探 測 器。脈沖激光波長為1570nm,脈沖能量為2mJ,脈沖寬度小于10ns。測量范圍距離可達3.9公里,幀速率為1kHz。
2019年,中國電子科技集團公司第三十八研究所研制了一種基于64×64 InGaAs蓋革模式雪崩光電二極管陣列的閃光激光雷達,其波長為1064nm,讀出電路的時間分辨率為2ns。實現(xiàn)了對大約300米外的目標(biāo)進行成像。
目前國內(nèi)對于SiPM器件的研究報道比較少,2018年,華中科技大學(xué)張璽等人基于0.18μm標(biāo)準(zhǔn)CMOS工藝的研制了SiPM器件;2020年,北京師范大學(xué)新器件實驗室成功研制出微單元尺寸為15μm、有效面積為9mm2的外延電阻淬滅型硅光電倍增器。
總之,國外對激光雷達的研究較早,在探測器技術(shù)方面有較多的技術(shù)儲備,目前研究的方向主要是提高探測器規(guī)模和成像性能,并實現(xiàn)大面陣,小型化、多波段、高幀頻及低功耗。在探測器技術(shù)研究方面,國內(nèi)與國外仍然存在著一定的差距,由于大規(guī)模的APD陣列探測器對各方面技術(shù)的要求高,在制作上更難實現(xiàn),特別是由于半導(dǎo)體工藝的限制以及國外的技術(shù)封鎖,國內(nèi)研究單位多集中于線列和小面陣探測的階段,需要進一步推進大面陣APD陣列探測器研制,提高激光雷達的集成性,實現(xiàn)快速三維成像。
總結(jié)
隨著激光器和探測器技術(shù)的不斷發(fā)展,成像激光雷達逐漸從小面陣掃描和線陣推掃式及面陣閃光成像發(fā)展,成像速度越來越快;隨著光電探測技術(shù)的成熟,探測靈敏度越來越高,使得激光雷達的體積、重量、功率進一步減小;這就要求探測器技術(shù)朝著增大陣列規(guī)模,減小像元間距,提高多功能集成度,豐富探測波段,超低功耗的方向發(fā)展。因為激光容易受到大氣狀況的干擾,現(xiàn)代探測技術(shù)的發(fā)展趨向于多種傳感器的融合探測獲取更豐富的目標(biāo)信息,三維成像趨向于主動多回波探測和被動成像相結(jié)合。
審核編輯:郭婷
-
探測器
+關(guān)注
關(guān)注
14文章
2633瀏覽量
73006 -
激光雷達
+關(guān)注
關(guān)注
968文章
3971瀏覽量
189837
原文標(biāo)題:綜述:APD陣列及其成像激光雷達系統(tǒng)的研究進展
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術(shù)的基于深度學(xué)習(xí)的進步
激光雷達技術(shù)的發(fā)展趨勢
光學(xué)雷達和激光雷達的區(qū)別是什么
一文看懂激光雷達

愛普生IMU產(chǎn)品在激光雷達測繪中的應(yīng)用

卷上天的激光雷達,現(xiàn)在發(fā)展到哪一步?研報推薦

基于FPGA的激光雷達控制板

硅基片上激光雷達技術(shù)綜述

硅基片上激光雷達的測距原理

激光雷達的探測技術(shù)介紹 機載激光雷達發(fā)展歷程

激光雷達LIDAR基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論