") 工業(yè)數(shù)字相機的技術(shù)應(yīng)用及選擇
工業(yè)數(shù)字相機的技術(shù)應(yīng)用及選擇
一、相機的選擇
(1)工業(yè)數(shù)字相機的分類:
工業(yè)相機按照芯片類型可以分為CCD相機、CMOS相機;
按照輸出色彩可以分為單色(黑白)相機、彩色相機;
按照傳感器的結(jié)構(gòu)特性可以分為線陣相機(黑白攝像機、3Line彩色相機、3CCD彩色相機(分光棱鏡)、面陣相機(黑白攝像機、Bayer彩色相機、3CCD彩色相機(分光棱鏡)
按照輸出信號方式可以分為模擬相機(PAL(黑白為CCIR))、NTSC(黑白為EIA))、數(shù)字相機(IEEE1394、USB2.0、Camera Link、GigE);
按照掃描方式可以分為隔行掃描相機、逐行掃描相機;
按照分辨率大小可以分為普通分辨率相機、高分辨率相機;
按照輸出信號速度可以分為普通速度相機、高速相機;
按照響應(yīng)頻率范圍可以分為可見光(普通)相機、紅外相機、紫外相機等。
(2)相機的主要參數(shù)
相機的主要參數(shù):
①分辨率;②速度(幀頻/行頻);③噪聲;(三) 曝光方式(Exposure)和快門速度(Shutter);④信噪比;⑤動態(tài)范圍;⑥像元深度;⑦光譜響應(yīng);⑧光學(xué)接口。
①分辨率
分辨率是相機最基本的參數(shù),由相機所采用的芯片分辨率決定,是芯片靶面排列的像元數(shù)量。
通常面陣相機的分辨率用水平和垂直分辨率兩個數(shù)字表示,如:1920(H)x 1080(V),前面的數(shù)字表示每行的像元數(shù)量,即共有 1920 個像元,后面的數(shù)字表示像元的行數(shù),即 1080 行。現(xiàn)在相機的分辨率通常表示多少 K,如1K(1024),2K(2048), 3K(4096)等。
在采集圖像時,相機的分辨率對圖像質(zhì)量有很大的影響。在對同樣大的視場(景物范圍)成像時,分辨率越高,對細節(jié)的展示越明顯。
②速度(最大幀率(Frame Rate)/行頻(Line Rate))
機的幀頻/行頻表示相機采集圖像的頻率,通常面陣相機用幀頻表示,單位 fps(Frame Per second),如 30fps,表示相機在1秒鐘內(nèi)最多能采集 30 幀圖像;線陣相機通常用行頻便是單位 KHz,如 12KHz 表示相機在1秒鐘內(nèi)最多能采集 12000 行圖像數(shù)據(jù)。
相機采集傳輸圖像的速率,對于面陣相機一般為每秒采集的幀數(shù)(Frames/Sec.),對于線陣相機為每秒采集的行數(shù)(Lines/Sec.)。
速度是相機的重要參數(shù),在實際應(yīng)用中很多時候需要對運動物體成像。相機的速度需要滿足一定要求,才能清晰準確的對物體成像。相機的幀頻和行頻首先受到芯片的幀頻和行頻的影響,芯片的設(shè)計最高速度則主要是由芯片所能承受的最高時鐘決定。
(三) 曝光方式(Exposure)和快門速度(Shutter)
對于線陣相機都是逐行曝光的方式,可以選擇固定行頻和外觸發(fā)同步的采集方式,曝光時間可以與行周期一致,也可以設(shè)定一個固定的時間;面陣相機有幀曝光、場曝光和滾動行曝光等幾種常見方式,數(shù)字相機一般都提供外觸發(fā)采圖的功能。
快門速度一般可到10微秒,高速相機還可以更快。
③噪聲
相機的噪聲是指成像過程中不希望被采集到的,實際成像目標外的信號。
根據(jù)歐洲相機測試標準EMVA1288 中,定義的相機中的噪聲從總體上可分為兩類:一類是由有效信號帶來的符合泊松分布的統(tǒng)計漲落噪聲,也叫散粒噪聲(shot noise),這種噪聲對任何相機都是相同的,不可避免,有其確定的計算公式(噪聲的平方=信號的均值);第二類是相機自身固有的與信號無關(guān)的噪聲,它是由圖像傳感器讀出電路、相機信號處理與放大電路等帶來的噪聲,每臺相機的固有噪聲都不一樣。另外,對數(shù)字相機來說,對視頻信號進行模擬轉(zhuǎn)換時會產(chǎn)生量化噪聲,量化位數(shù)越高,噪聲越低。
④信噪比
相機的信噪比定義為圖像中信號與噪聲的比值(有效信號平均灰度值與噪聲均方根的比值),代表了圖像的質(zhì)量,圖像信噪比越高,圖像質(zhì)量越好。(信噪比高的相機性能較好)
⑤動態(tài)范圍
相機的動態(tài)范圍表明相機探測光信號的范圍,動態(tài)范圍可用兩種方法來界定,一種是光學(xué)動態(tài)范圍,指飽和時最大光強與等價于噪聲輸出的光強的比值,由芯片的特性決定。另一種是電子動態(tài)范圍,是指飽和電壓和噪聲電壓之間的比值。
對于固定相機其動態(tài)范圍是一個定值,不隨外界條件變化而變化。在線性響應(yīng)處,相機的動態(tài)范圍定義為飽和曝光量與噪聲等效曝光量的比值:

動態(tài)范圍可用倍數(shù)、dB 或 Bit 等方式來表示。動態(tài)范圍大,則相機對不同的光照強度有更強的適應(yīng)能力。
⑥像元/像素深度
數(shù)字相機輸出的數(shù)字信號,即像元灰度值,具有特殊的比特位數(shù),稱為像元深度。即每像素數(shù)據(jù)的位數(shù),一般常用的是8Bit,對于數(shù)字相機機一般還會有10Bit、12Bit、14Bit等。
對于黑白相機這個值的方位通常是 8-16bit。像元深度定義了灰度由暗道亮的灰階數(shù)。例如,對于 8bit 的相機 0 代表全暗而 255代表全亮。介于 0 和 255 之間的數(shù)字代表一定的亮度指標。10bit 數(shù)據(jù)就有 1024 個灰階,而 12bit 有 4096 個灰階。每一個應(yīng)用我們都要仔細考慮是否需要非常細膩的灰度等級。從 8bit 上升到 10bit 或者 12bit 的確可以增強測量的精度,但是也同時降低了系統(tǒng)的速度,并且提高了系統(tǒng)集成的難度(線纜增加,尺寸變大),因此我們也要慎重選擇。
⑦光譜響應(yīng)
光譜響應(yīng)是指相機對于不同波長光線的響應(yīng)能力,通常指其所采用芯片的光譜響應(yīng)。通常用光譜曲線表示,橫軸表示不同波長,縱軸表示量子效率。按照響應(yīng)光譜不同也把相機分為可見光相機(400nm—1000nm,峰值在 500nm—600nm 之間),紅外相機(響應(yīng)波長在 700nm 以上),紫外相機(可以響應(yīng)到 200nm—400nm的短波),我們需要根據(jù)接收被測物發(fā)光波長的不同來選擇不同的光譜響應(yīng)的相機。
⑧光學(xué)接口/接口類型
光學(xué)接口是指相機與鏡頭之間的借口,常用的鏡頭的借口有 C 口,CS 口,F(xiàn) 口。下表提供了關(guān)于鏡頭安裝及后焦距的信息。其中 M42 鏡頭適配器源于高端攝像標準。另一方面,相機的 Z 軸均依據(jù)所提供的適配器而進行了優(yōu)化,一般情況下不要輕易拆卸鏡頭適配器。
| 接口類型 | 后截距 | 接口 |
| C口 | 17.526mm | 螺口 |
| CS口 | 12.5mm | 螺口 |
| F口 | 46.5mm | 卡口 |
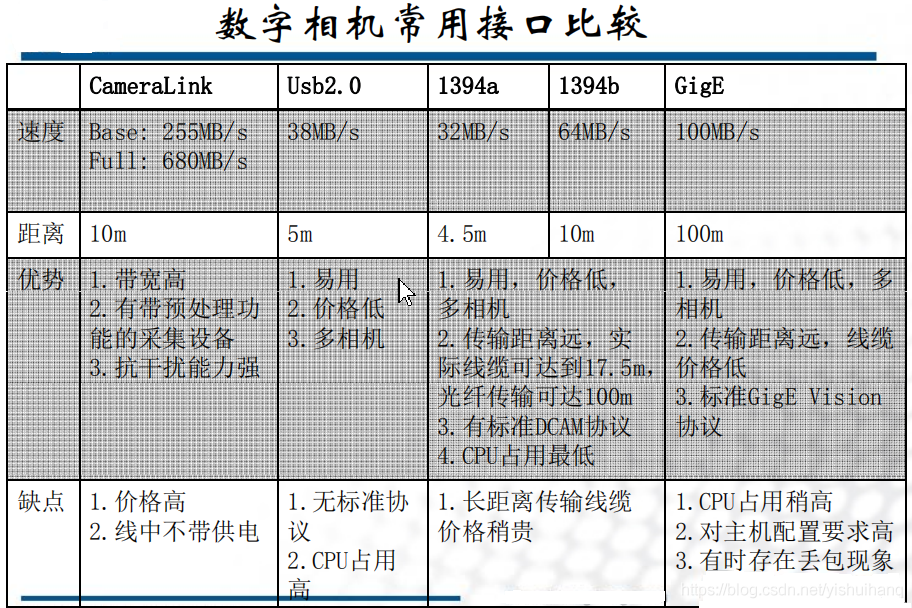
(3)工業(yè)數(shù)字攝像機主要接口類型
主要有:Usb2.0、IEEE 1394、CameraLink、GiggE。
目前市面上工業(yè)相機大多是基于CCD或CMOS芯片的相機。
CCD攝像機,CCD稱為電荷耦合器件,CCD實際上只是一個把從圖像半導(dǎo)體中出來的電子有組織地儲存起來的方法。優(yōu)點:圖像質(zhì)量高、靈敏度高、對比度高;缺點:有Blooming現(xiàn)象、不能直接訪問每個像素、沒有片上處理功能。
CMOS攝像機,CMOS稱為“互補金屬氧化物半導(dǎo)體”,CMOS實際上只是將晶體管放在硅塊上的技術(shù),沒有更多的含義。CMOS可以將光敏元件、放大器、A/D轉(zhuǎn)換器、存儲器、數(shù)字信號處理器和計算機接口控制電路集成在一塊硅片上。優(yōu)點:體積小結(jié)構(gòu)簡單、片上處理功能多、低功耗、沒有Blooming現(xiàn)象、能直接訪問單個像素、高動態(tài)范圍(120dB)、幀率可以更高;缺點:一致性差、光靈敏度差、噪聲大。
CCD傳感器相機適合高速動態(tài);
CMOS傳感器相機適合低速動態(tài)或靜止。
相對于CCD傳感器,CMOS傳感器的隨機讀取特性使其容易實現(xiàn)圖像的矩形感興趣區(qū)域(AOI)讀出方式。這一特性使得CMOS能針對較小的AOI時可以獲得更高的幀率。CMOS傳感器的另一優(yōu)點就是,讀出速度快。CMOS傳感器的缺點是填充因子很低,通常使用微鏡來提高其填充因子。
CCD和COMS區(qū)別:
? CCD的優(yōu)勢在于成像質(zhì)量好;
? CMOS價格比CCD便宜;
? CMOS電源消耗量比CCD低;
? CCD用于動態(tài)測量;
? CMOS 用于低速或靜態(tài)測量。但是現(xiàn)在全
局曝光的CMOS也可用于動態(tài)測量;
? 現(xiàn)在CCD是主流,但CMOS正在趕上,而且CMOS是未來。
注:CCD是全局曝光,而CMOS既存在全局曝光又有卷簾曝光。
如何選擇工業(yè)相機:
首先要弄明白的是自己的檢測任務(wù),是靜態(tài)拍照還是動態(tài)拍照、拍照的頻率是多少、是做缺陷檢測還是尺寸測量或者是定位、產(chǎn)品的大小(拍攝視野)是多少、需要達到的精度多少、所用軟件的性能、現(xiàn)場環(huán)境情況如何、有沒有其它的特殊要求等。
如果是動態(tài)拍照,運動速度是多少,根據(jù)運動速度選擇最小曝光時間以及是否需要逐行掃描的相機;而相機的幀率(最高拍照頻率)跟像素有關(guān),通常分辨率越高幀率越低,不同品牌的工業(yè)相機的幀率略有不同。
根據(jù)檢測任務(wù)的不同、產(chǎn)品的大小、需要達到的分辨率以及所用軟件的性能可以計算出所需工業(yè)相機的分辨率;現(xiàn)場環(huán)境最要考慮的是溫度、濕度、干擾情況以及光照條件來選擇不同的工業(yè)相機。
考慮待觀察或待測量物體的精度,根據(jù)精度選擇工業(yè)相機分辨率。
相機像素精度=單方向視野范圍大小/相機單方向分辨率。
則相機單方向分辨率=單方向視野范圍大小/理論精度。

實例1:
實例2:
假設(shè)檢測一個物體的表面劃痕,要求拍攝的物體大小為10*8mm,而要求的檢測精度是0.01mm。
首先假設(shè)要拍攝的視野范圍在1210mm,那么相機的最低分辨率應(yīng)該選擇在:(12/0.01)(10/0.01)=1200*1000,約為120萬像素的相機,也就是說一個像素對應(yīng)一個缺陷檢測的話那么最低分辨率必須不少于120萬像素,但市面上常見的是130萬像素的相機,因此一般而言是選用130萬像素的相機。
但實際問題是如果一個像素對應(yīng)一個缺陷的話,那么這樣的系統(tǒng)一定會極不穩(wěn)定,因為隨便的一個干擾像素點都可能被誤認為缺陷,所以為了提高系統(tǒng)的精準度和穩(wěn)定性,最好取缺陷的面積在3到4個像素以上,這樣選擇的相機也就在130萬乘3以上,即最低不能少于300萬像素,通常采用300萬像素的相機為最佳(我見過最多的人抱著亞像素不放說要做到零點幾的亞像素,那就不用這么高分辨率的相機了。
相機的曝光時間
相機的最小曝光時間,可以決定目標的運動速度。或者反過來說,目標的運動速度,對相機的最小曝光時間提出了要求。假設(shè)我們的目標運動速度是1mm/S,我們的測量精度是0.01mm/pixel,那么我們必須考慮,物體的運動引起的拖影必須要小于我們的精度0.01mm,目標移動0.01mm,需要用時10ms,這就要求我們的相機的曝光時間必須小于10ms,如果大于這個曝光時間,那么僅僅物體運動引起的模糊就會大于0.01,這時我們的精度已經(jīng)無法達到0.01了。
通常來說,物體運動引起的模糊應(yīng)該比我們要求的測量精度小一個數(shù)量級,這樣可以減少其對系統(tǒng)的影響,一般我們的工業(yè)相機最快曝光時間可以達到幾十至一百多微秒的樣子。如此短的曝光時間,對光能量要求比較大,因此需要選擇合適的光源與光源控制器。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2552文章
51217瀏覽量
754611 -
晶體管
+關(guān)注
關(guān)注
77文章
9705瀏覽量
138467 -
CMOS傳感器
+關(guān)注
關(guān)注
4文章
118瀏覽量
24535
原文標題:機器視覺工業(yè)缺陷檢測的那些事(相機)
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
深視智能高速相機觀測水滴滴落過程#高速相機 #高清高速相機 #高速工業(yè)相機 #工業(yè)相機 #機器視覺 #傳感器
工業(yè)相機的幀率是不是越高越好

工業(yè)相機測長儀的組成部分
VGA接口的工業(yè)相機方案5MP/1080P VGA工業(yè)相機方案
工業(yè)相機該選擇哪種圖像采集卡?

Dragonfly S 5MP工業(yè)相機 機器視覺應(yīng)用的新選擇

凌科LP16 Type-C3.1系列工業(yè)級連接器工業(yè)相機應(yīng)用案例解析
VSP2560/62/66數(shù)字相機混合信號處理IC數(shù)據(jù)表

數(shù)字設(shè)備中采集數(shù)字圖像的兩種方法是什么
工業(yè)相機單目和雙目的區(qū)別

工業(yè)相機的常見基礎(chǔ)問答
選擇工業(yè)相機的10大要素!
工業(yè)相機為什么使用圖像緩沖技術(shù)?

- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論