

線掃相機——機器視覺中無限制物體的檢測
在機器視覺中,在檢測連續物體或者滾動物體時,線掃相機是最佳的解決方案。通常,它們能提供很高的分辨率,因為它們要求很高的速度和數據率。
一、多條窄帶拼成一副圖像
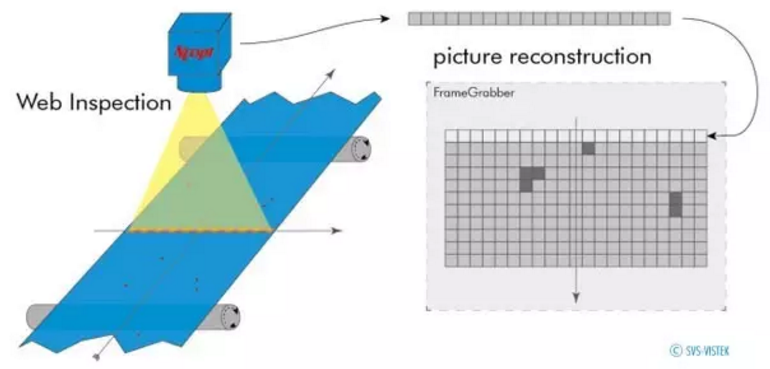
線掃相機只抓取一行作為圖像發送到電腦,主機電腦將所有的行進行組織拼接。如果不停止抓取,幾乎可以創建一個無限大的圖像。在印刷行業、紡織、旋轉或者移動物體的檢測應用時,線掃相機是最佳的解決方案。
二、詳解線掃相機
1.線掃相機的歷史
可以檢測黑白單線CCD芯片隨著傳真機第一次進入市場。事實上,目前大部分文件掃描儀依然基于這個原理。這種情況下,條狀傳感器是位于物體下方的。隨著傳感器的微型化和分辨率的提高,傳感器已經進一步遠離物體。今天,線掃相機被集成到傳統相機上,可以搭配標準的鏡頭進行操作。
2.線掃相機的光學設計
(1)相機—物體關系
人眼或者標準的照相機在一個時刻獲取一幅圖像,對于靜止物體和運動物體是沒有區別的。同一時刻,所有的圖像數據都會被收集。
線掃相機需要物體或者相機運動,最后的圖像大小一方面取決于相機的分辨率,另一方面取決于主機拼接的線數。有兩種搭建線掃相機的方式:
相機靜止,物體運動
相機運動,物體靜止
相機和物體同時移動,在大多數場合下沒有意義。
線掃相機一次只取圖像的一行,隨著被檢測物體運動,一行接一行地采集,因此用線掃相機采集的一個2D圖像的每一行都是在不同時間點采集的。這與面陣相機來或者人眼采集圖像在機器視覺軟件理解的意義上來說,是不一樣的。
(2)線掃鏡頭
從上到下文件掃描儀對比,線掃相機需要鏡頭,這與面陣相機是完全相同的。但是作為線掃相機,提供很高的分辨率(最高16K/線),相機需要擁有高質量鏡頭與合適的MTF。
(3)線掃光源
與面陣相機最大的不同就是光源的搭建,為了獲取相同的行(物體運動很快),你必須要照亮一條線,但由于速度很快(一般在us級別),因此線掃相機經常需要很高亮度的光照(高達1000000lux)。
3.讀取和抓取
因為芯片只抓取一行,相比大的面陣相機,讀取這些數據就很簡單了。不管是用CCD還是CMOS技術都沒有什么區別,當分辨率高且運動速度很快時,數據頻率也是很高的,你需要一個抓幀器(通常稱為采集卡)來讀取相機的數據到電腦。
(1)線掃需要脈沖
使用線掃相機的一個決定性的特點就是可以構建很大(無限)的圖像。在高頻下,一些非常細窄的線被拼接到一條線上,為了解決這個問題,與運動物體經過的速度保持同步來抓取這些線很重要。大多數場合下,與傳送帶集成在一起的脈沖發生器(也就是我們說的編碼器)產生脈沖信號傳遞到相機。這樣,相機的線頻率就與物體的速度一致了。
4.多行線掃相機
除了上面談到的單線的線掃相機外,也有其他線數的相機:
(1)多行線掃相機
雙線或者更多線的相機有更高的同步要求,增加了物體可能的最大速度,在HDR模式下提高了圖像的動態范圍。
TDICCD線通過芯片顯著地拓寬了線掃相機的動態范圍。
(2)彩色線掃相機
像大面陣相機一樣,線掃相機可以搭配單色(Monochrome)或者彩色(Color)的芯片。RGB的過濾片作為Bayer 模板覆蓋在像素上,或者分布在線上。這些線分配了特定的顏色,通常在過濾片的下面。生成的原始圖像作為單色信息傳輸,然后在采集卡上轉換為彩色圖像。
另一種選擇,2條或3條線,每條線指定了顏色,被用于彩色線掃相機。這種配置的問題是作為同一個像素的顏色不得不考慮對象相關的時間差異。好處是,一種顏色的分辨率是芯片的全分辨率。
NEopt允許將雙線相機配置為只有兩個顏色,這種情況下,紅色和藍色兩種顏色構成不如說是兩個相機。
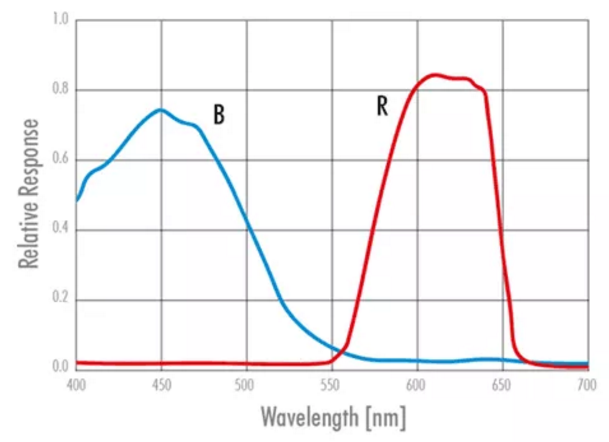
NeOpt NCAM2-BRLD-08K07CL光譜靈敏度
5.線掃相機速率和分辨率
就像大面陣相機一樣,線掃相機的速率由接口決定,通常的接口如GigE 和CameraLink。速率可以通過線的水平分辨率(線的總像素個數)和每秒的線數計算出來,表達為行頻kHz/行/s。
例子:NCAM2-BLS,Camera Link接口:8K,70kHz
每秒采集70,000行,如果用在100km/h的傳輸帶和一米寬的物體上,可以推算出垂直方向的分辨率0.125mm/s,水平方向的分辨率0.514mm/s:
垂直方向:100km/h / 70,000 lines/s=27.78m/s / 70,000 lines/s=0.397mm
水平方向:1m/8000pix=0.125mm/pix
速度:70,000 lines/s x 8000 pixels=534 MB/s
審核編輯:郭婷
-
相機
+關注
關注
4文章
1405瀏覽量
54277 -
機器視覺
+關注
關注
163文章
4462瀏覽量
121510
原文標題:線掃相機——機器視覺中無限制物體的檢測
文章出處:【微信號:www_51qudong_com,微信公眾號:機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業相機與采集卡配套方案:構建高性能機器視覺系統的核心要素

內置推掃式高光譜相機:VIX-S315無需外置推掃裝置,1秒內完成一次全譜推掃成像
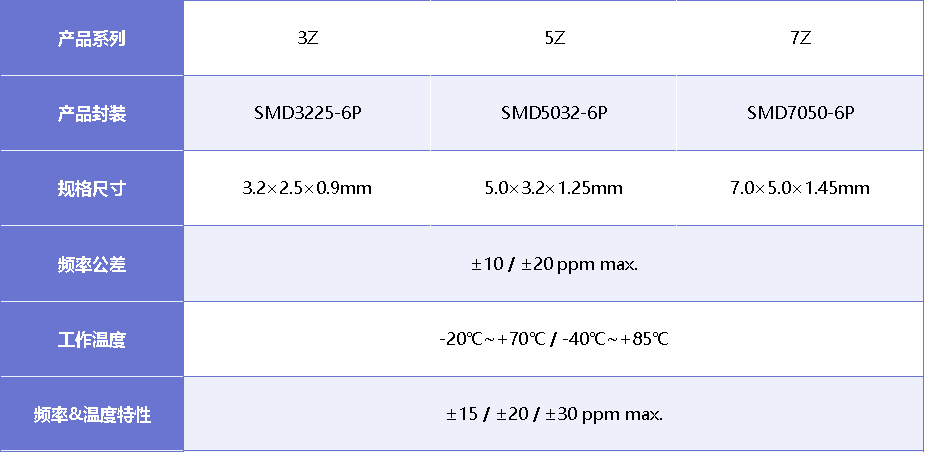
石英晶振在智能相機中的應用
視覺檢測是什么意思?機器視覺檢測的適用行業及場景有哪些?
AMEYA360:廣和通端側AI解決方案助智能相機捕捉關鍵瞬間
機器視覺檢測技術在工業自動化中的應用
如何通過視覺檢測確保eMMC存儲芯片質量?






 工商網監
工商網監

評論