 如何使用Raspberry Pi3和藍牙構建遙控汽車
如何使用Raspberry Pi3和藍牙構建遙控汽車
Raspberry Pi 因其通過互聯網進行無線通信的無縫能力而在物聯網項目中非常受歡迎。Raspberry Pi 3內置Wi-Fi和藍牙,藍牙是一種非常流行的無線通信協議。今天我們將使用Raspberry Pi 3和藍牙構建遙控汽車,在這里我們將使用智能手機作為遙控器來控制汽車。
在這里,我們使用的是具有內置藍牙的Raspberry Pi 3,因此我們不需要使用任何外部USB藍牙加密狗。在這里,我們使用RFCOMM藍牙協議進行無線通信。
Python 中的藍牙編程遵循套接字編程模型,藍牙設備之間的通信通過 RFCOMM 套接字完成。RFCOMM(射頻通信)是一種藍牙協議,提供模擬RS-232串行端口,也稱為串行端口仿真。藍牙串行端口配置文件基于此協議。RFCOMM 因其廣泛的支持和公開可用的 API 而在藍牙應用中非常流行。它綁定到 L2CAP 協議。
安裝藍牙通信所需的軟件包:
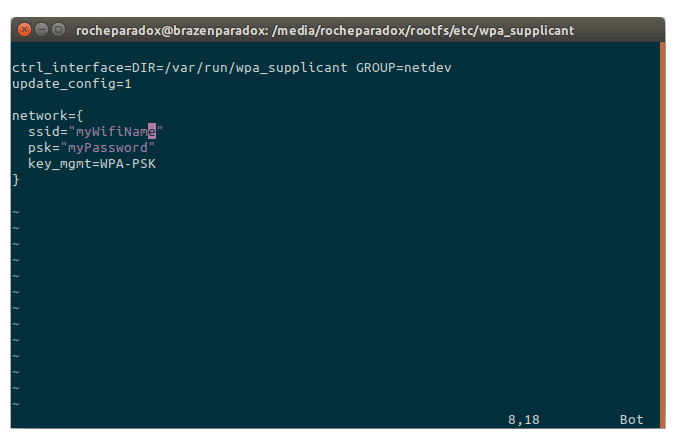
在開始之前,我們需要安裝一些軟件來在樹莓派中設置藍牙通信。您應該準備好Raspbian Jessie安裝的存儲卡和Raspberry Pi。
所以現在我們首先需要使用以下命令更新 Raspbian:
sudo apt-get update
sudo apt-get upgrade
然后我們需要安裝一些與藍牙相關的軟件包:
sudo apt-get install bluetooth blueman bluez
然后重新啟動樹莓派:
sudo reboot
BlueZ是一個開源項目和官方Linux藍牙協議棧。它支持所有核心藍牙協議,現在成為官方Linux內核的一部分。
Blueman 提供桌面界面來管理和控制藍牙設備。
最后,我們需要用于藍牙通信的python庫,以便我們可以使用Python語言通過RFCOMM發送和接收數據:
sudo apt-get install python-bluetooth
同時為 Raspberry Pi 安裝 GPIO 支持庫:
sudo apt-get install python-rpi.gpio
現在我們已經完成了在樹莓派中安裝藍牙通信所需的軟件包。
通過藍牙將設備與樹莓派配對:
將藍牙設備(如手機)與樹莓派配對非常容易。在這里,我們將Android智能手機與樹莓派配對。我們之前在 Pi 中安裝了 BlueZ,它提供了一個名為“藍牙ctl”的命令行實用程序來管理我們的藍牙設備。
現在通過以下命令打開藍牙 ctl 實用程序:
sudo bluetoothctl
您可以通過鍵入“幫助”來檢查藍牙ctl實用程序的所有命令。現在我們需要按給定順序輸入以下命令:
[bluetooth]# power on
[bluetooth]# agent on
[bluetooth]# discoverable on
[bluetooth]# pairable on
[bluetooth]# scan on
在最后一個命令“掃描”之后,您將在列表中看到您的藍牙設備(手機)。確保您的手機已開啟藍牙,并且附近的設備可以看到您的手機。然后復制設備的MAC地址并使用給定的命令進行配對:
pair
然后,系統會提示您在終端控制臺中輸入密碼或 PIN,然后在那里輸入密碼并按 Enter 鍵。然后在出現提示時在手機中輸入相同的密碼,您現在已成功與樹莓派配對。
如前所述,您還可以使用桌面界面配對手機。安裝 Blueman 后,您將在 Raspberry Pi 桌面的右側看到一個藍牙圖標,如下所示,您可以使用它輕松進行配對。
選擇玩具車:
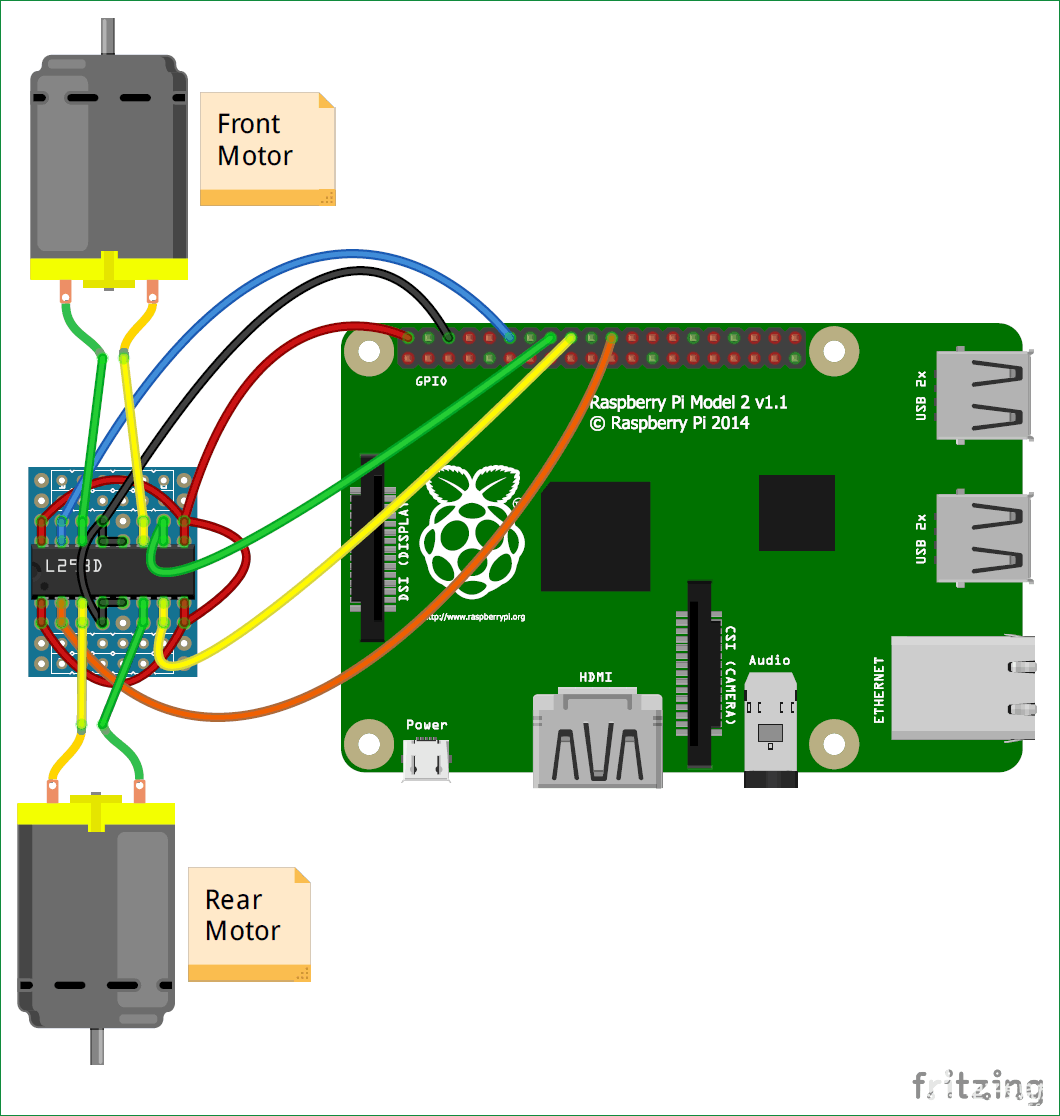
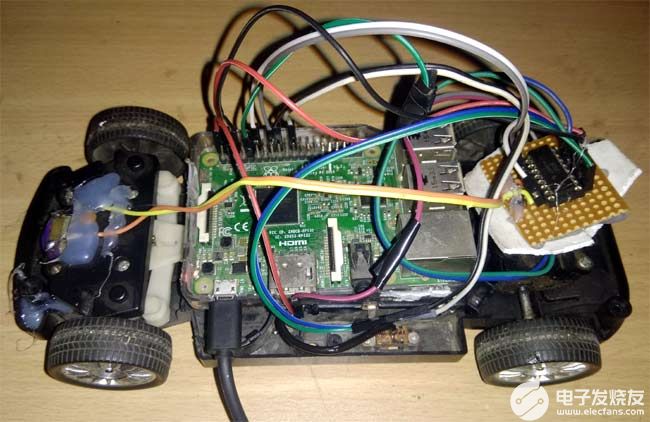
在這個樹莓派控制汽車項目中,我們使用玩具車進行演示。在這里,我們選擇了具有左右移動轉向功能的RF玩具車。購買這輛車后,我們用我們的樹莓電路更換了它的射頻電路。這輛車有兩個直流電機,一個旋轉兩個前輪,另一個旋轉兩個后輪。前側電機用于為汽車提供方向,即向左或向右轉(如真正的汽車轉向功能)。后側電機用于驅動汽車向前和向后方向。樹莓的藍牙用于從安卓手機無線接收命令以控制汽車。

您可以使用任何具有兩個直流電機的玩具車來旋轉前輪和后輪。
電路圖及說明:
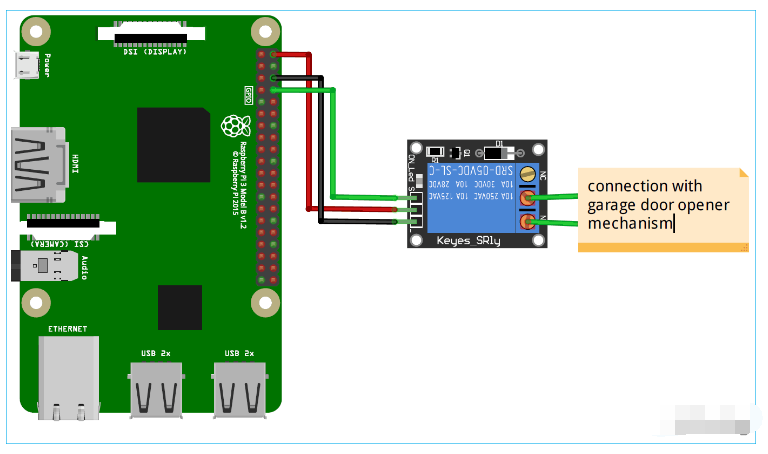
在這輛遙控車中,我們只需要使用L293D 模塊將樹莓派與兩個電機連接。為了給Raspberry Pi和汽車供電,我們使用了移動電源。移動電源足以為Raspberry Pi和汽車的電機供電,但是當我們把移動電源放在汽車上時,由于移動電源的重量很重,汽車將無法正常移動。因此,我們建議使用輕量電源或鋰電池為系統供電。所有連接如下圖所示。另請查看我們的機器人部分,了解有關使用不同技術控制電機的更多信息。
注意:不要在樹莓派上放置超過 5v 的電壓。
該電路已在 Perf 板上為該項目制作,因此汽車的重量更小。

使用安卓應用程序BlueTerm遠程控制汽車:
現在,在設置了所有內容并成功嘗試通過藍牙配對智能手機之后,我們需要安裝一個Android應用程序,以使用藍牙串行適配器與Raspberry Pi進行通信,以便我們可以控制Raspberry Pi的GPIO引腳。如前所述,RFCOMM / SPP協議模擬藍牙上的串行通信,因此我們在此處安裝了支持此協議的BlueTerm App。
您還可以使用任何其他支持通過RFCOMM插座進行通信的藍牙終端應用程序。
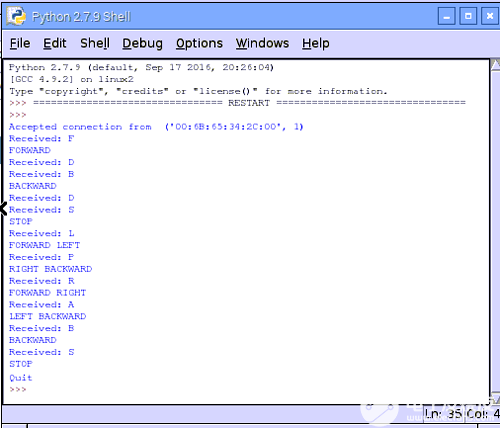
現在,下載并安裝BlueTerm應用程序后,從終端運行下面給定的Python程序,并同時從BlueTerm應用程序連接配對的覆盆子皮設備。
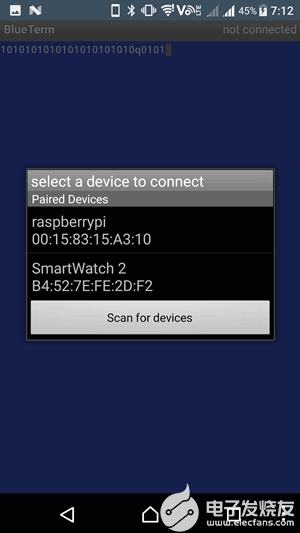
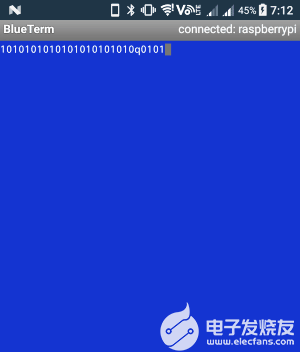
連接成功后,您將在應用程序的右上角看到connected:raspberrypi,如下所示:
現在,您只需從BlueTerm應用程序中輸入以下命令即可使汽車向所需方向移動。按“q”退出程序。您可以使用谷歌語音輸入鍵盤通過語音控制這輛車。
命令:
F – 向前移動
B – 向后移動
S – 停止
L – 向左移動
R – 向前右移動
A – 向后向左移動
P – 向后右移動
Q – 退出
蟒蛇編程:
用于控制Raspberry Pi GPIO與Android App的Python程序非常簡單且不言自明。只需要我們了解一點與藍牙射頻通信相關的代碼。否則,就像通過使電機的銷高或低來控制任何機器人或汽車一樣。
首先,我們需要導入藍牙套接字庫,它使我們能夠使用 Python 語言控制藍牙;我們已經在上一節中安裝了相同的庫。
import Bluetooth
然后我們加入了更多的頭文件,并定義了電機的引腳,將它們默認為低電平。
import bluetooth
import time
import RPi.GPIO as GPIO
m11=18
m12=23
m21=24
m22=25
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(m11, GPIO.OUT)
GPIO.setup(m12, GPIO.OUT)
GPIO.setup(m21, GPIO.OUT)
GPIO.setup(m22, GPIO.OUT)
GPIO.output(m11 , 0)
GPIO.output(m12 , 0)
GPIO.output(m21, 0)
GPIO.output(m22, 0)
以下是負責藍牙通信的代碼:
server_socket=bluetooth.BluetoothSocket( bluetooth.RFCOMM )
port = 1
server_socket.bind(("",port))
server_socket.listen(1)
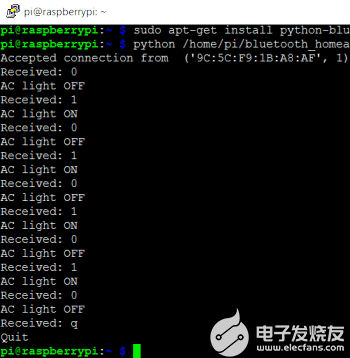
client_socket,address = server_socket.accept()
print "Accepted connection from ",address
在這里我們可以逐行理解它們:
server_socket=藍牙。藍牙插座(藍牙。RFCOMM):為藍牙RFCOMM通信創建套接字。
server_socket.bind((“”, port):- 服務器將主機 '' 上的腳本綁定到端口。
server_socket.聽(1):服務器偵聽一次接受一個連接。
client_socket, 地址 = server_socket.accept():服務器接受客戶端的連接請求并將 mac 地址分配給可變地址,client_socket是客戶端的套接字
在此之后,我們創建了一些負責向所需方向移動汽車的函數:def left_side_forward(),def right_side_forward(),def forward(),def left_side_reverse(),def right_side_reverse(),def reverse()def stop()。當我們從移動blueTerm應用程序中按L,R,F,A,P,B,S時,將分別調用這些函數,并且汽車將相應地移動。
data=""
while 1:
data= client_socket.recv(1024)
print "Received: %s" % data
if (data == "F"):
forward()
elif (data == "L"):
left_side_forward()
elif (data == "R"):
right_side_forward()
elif (data == "B"):
reverse()
elif (data == "A"):
left_side_reverse()
elif (data == "P"):
right_side_reverse()
elif data == "S":
stop()
elif (data == "Q"):
print ("Quit")
break
client_socket.close()
server_socket.close()
數據 = client_socket.recv(1024):通過客戶端套接字client_socket接收數據并將其分配給變量數據。一次最多可以接收 1024 個字符。
最后,在所有編程之后,使用以下代碼關閉客戶端和服務器連接:
client_socket.close()
server_socket.close()
import bluetooth
import time
import RPi.GPIO as GPIO
m11=18
m12=23
m21=24
m22=25
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(m11, GPIO.OUT)
GPIO.setup(m12, GPIO.OUT)
GPIO.setup(m21, GPIO.OUT)
GPIO.setup(m22, GPIO.OUT)
GPIO.output(m11 , 0)
GPIO.output(m12 , 0)
GPIO.output(m21, 0)
GPIO.output(m22, 0)
server_socket=bluetooth.BluetoothSocket( bluetooth.RFCOMM )
port = 1
server_socket.bind(("",port))
server_socket.listen(1)
client_socket,address = server_socket.accept()
print "Accepted connection from ",address
def left_side_forward():
print "FORWARD LEFT"
GPIO.output(m21 , 1)
GPIO.output(m22 , 0)
time.sleep(.5)
GPIO.output(m11 , 1)
GPIO.output(m12 , 0)
def right_side_forward():
print "FORWARD RIGHT"
GPIO.output(m21 , 1)
GPIO.output(m22 , 0)
time.sleep(.5)
GPIO.output(m11 , 0)
GPIO.output(m12 , 1)
def forward():
print "FORWARD"
GPIO.output(m11 , 0)
GPIO.output(m12 , 0)
GPIO.output(m21 , 1)
GPIO.output(m22 , 0)
def left_side_reverse():
print "BACKWARD LEFT"
GPIO.output(m21 , 0)
GPIO.output(m22 , 1)
time.sleep(.5)
GPIO.output(m11 , 1)
GPIO.output(m12 , 0)
def right_side_reverse():
print "BACKWARD RIGHT"
GPIO.output(m21 , 0)
GPIO.output(m22 , 1)
time.sleep(.5)
GPIO.output(m11 , 0)
GPIO.output(m12 , 1)
def reverse():
print "BACKWARD"
GPIO.output(m11 , 0)
GPIO.output(m12 , 0)
GPIO.output(m21 , 0)
GPIO.output(m22 , 1)
def stop():
print "STOP"
GPIO.output(m11 , 0)
GPIO.output(m12 , 0)
GPIO.output(m21 , 0)
GPIO.output(m22 , 0)
data=""
while 1:
data= client_socket.recv(1024)
print "Received: %s" % data
if (data == "F"):
forward()
elif (data == "L"):
left_side_forward()
elif (data == "R"):
right_side_forward()
elif (data == "B"):
reverse()
elif (data == "A"):
left_side_reverse()
elif (data == "P"):
right_side_reverse()
elif data == "S":
stop()
elif (data == "Q"):
print ("Quit")
break
client_socket.close()
server_socket.close()
-
遙控汽車
+關注
關注
0文章
8瀏覽量
6991 -
微藍牙
+關注
關注
0文章
2瀏覽量
6686
發布評論請先 登錄
相關推薦
【Raspberry Pi 3試用體驗】【一】Pi3開箱貼
【Raspberry Pi 3試用體驗】生逢其時第一站-開箱
【Raspberry Pi 3試用體驗】試用進程大匯總(2016.6.21已更新)
【Raspberry Pi 3試用體驗】樹莓pi2\pi3 model B型 橫向對比
微雪電子Raspberry Pi 3 Model主板簡介
微雪電子樹莓派3計算模塊Raspberry Pi3簡介

構建一個基于Raspberry Pi的藍牙揚聲器
使用Raspberry Pi構建一個智能車庫開門器






 工商網監
工商網監
評論