 在電力電子電路應用中為什么需要驅動芯片并聯使用呢
在電力電子電路應用中為什么需要驅動芯片并聯使用呢
本文主要闡述了在電力電子電路應用中,為什么需要驅動芯片并聯使用,芯片能夠并聯使用應具備什么特征,以及驅動芯片并聯使用應注意的問題點。
01
驅動芯片與功率管的配合
功率器件在工業、能源、汽車等應用中被廣泛的使用以實現各種的功率變換,同時隨著社會的迅速發展,功率變換的功率等級也越來越高。在大功率的功率因數校正電路 (PFC),低壓大電流的同步整流電路中, 往往需要多個功率管并聯以滿足電路功率輸出的需求。
多個功率管并聯,導致功率管的QGC,QGE變大,若選用驅動芯片的驅動電流較小,則功率管開通時間很長,此時會導致功率管損耗很大,發熱嚴重。驅動輸出進行并聯來驅動功率管是一種解決方案。
02
驅動芯片并聯使用
如上述所,當功率管的門極電荷比較大,而驅動芯片能力不足時,為了選擇合適的開關速度和性能,需要將驅動芯片輸出端并聯使用。
但驅動芯片并聯時,對驅動芯片要求較高,并不是所有的驅動芯片都適合并聯使用。
圖1.顯示了驅動芯片并聯使用時的示意圖。由于是并聯使用,要求內部的MOSFET M1與M3,M2與M4同時開通,同時關斷,否則OUTA與OUTB之間必然存在電位差,導致M1與M4或者M2與M3同時導通,從而導致共通的現象而損壞驅動芯片。
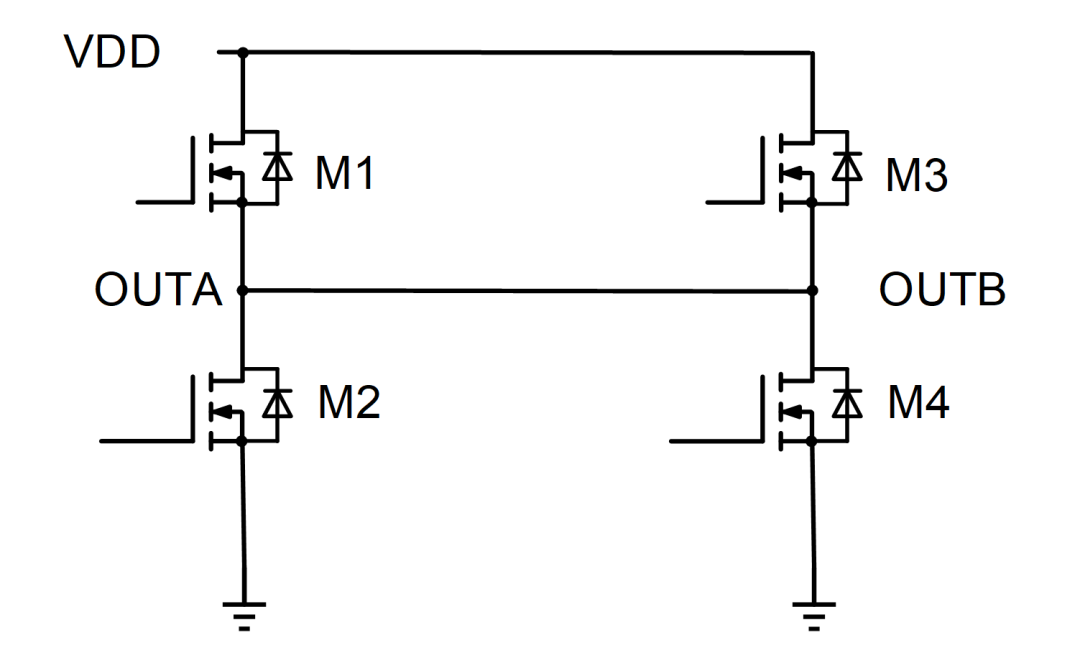
圖 1. 驅動芯片并聯使用示意圖
因此,在驅動芯片并聯的應用中需要特別關注以下幾點:
(1)驅動芯片本身的對稱問題。兩個驅動通道的參數要一致,每路驅動的輸入到輸出的延時、輸入的翻轉電平以及輸出的上升、下降時間要一致。
(2)兩路輸入信號的短接點要盡量靠近芯片的管腳,并且輸入信號要有快速的dv/dt。
(3)芯片的外圍應用電路上,可以在外部增加一個電阻,用來限制直通電流。
下面以SLM27524芯片為例來說明驅動并聯應用中要注意的一些問題。
03
驅動芯片的一致性
驅動芯片并聯對芯片本身的一致性是有要求的,如果兩路驅動的一致性不好,在并聯時會導致驅動芯片的損壞。SLM27524在設計的時候已經考慮了這種并聯應用的需求,因此在兩路驅動的延時上做了比較好的匹配。
圖2和圖3顯示了SLM27524在給同一個輸入信號時,兩路驅動輸出在開通、關斷時的波形。從波形測試上看,SLM27524的兩路驅動在開通延時、關斷延時、上升時間和下降時間上都有很好的一致性。
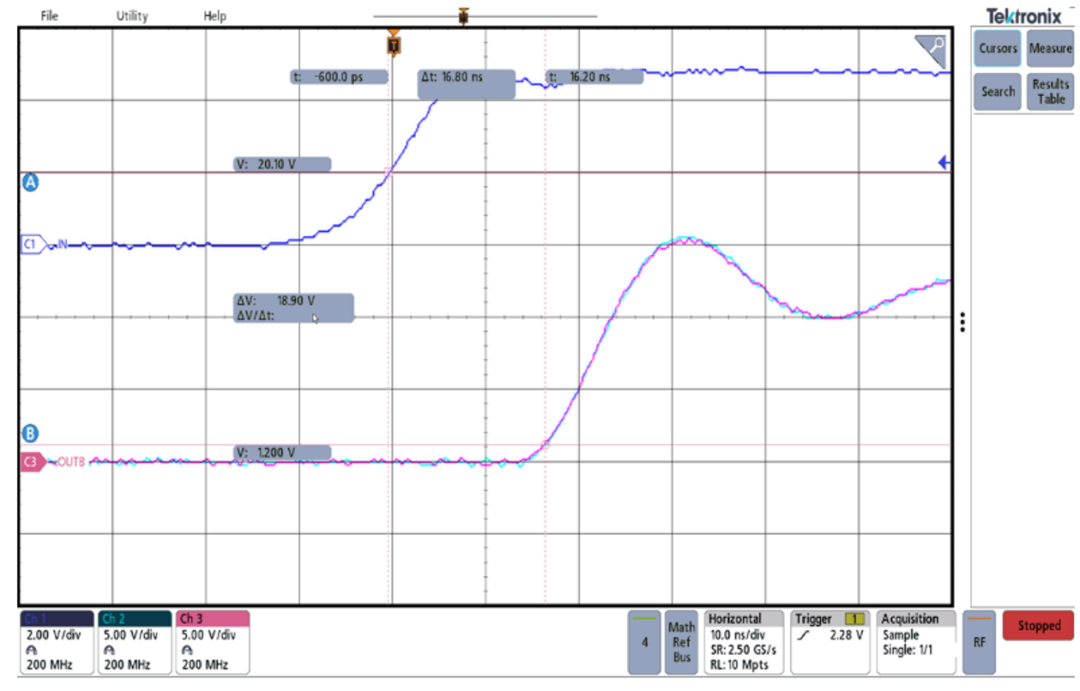
圖 2. SLM27524通道開通時的波形
CH1: 驅動輸人IN 丨 CH2: 驅動輸出OUTA
CH3: 驅動輸出OUTB
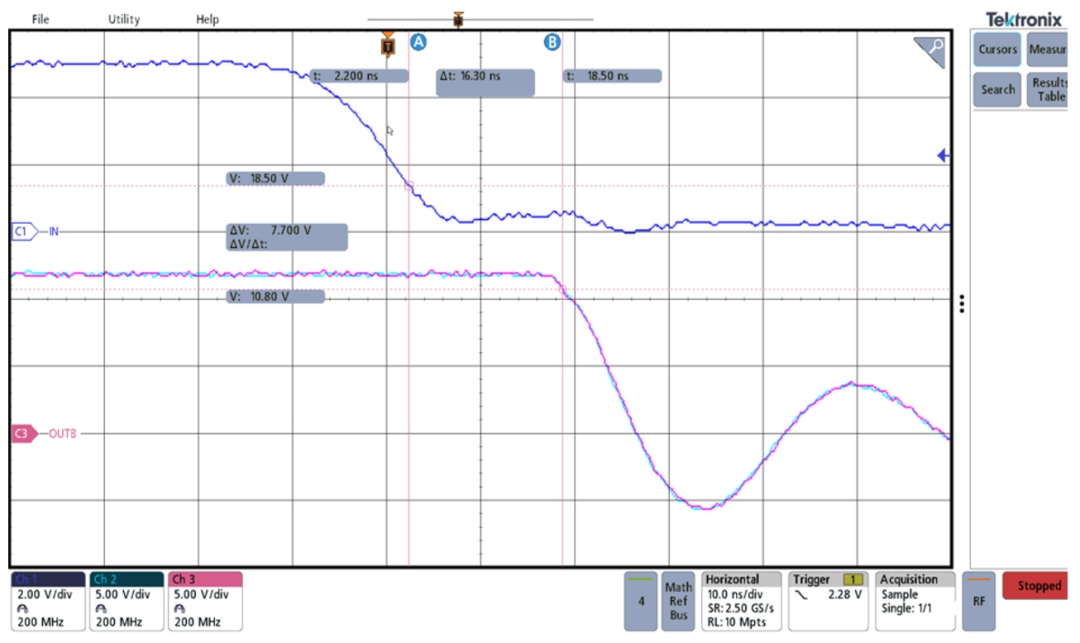
圖 3. SLM27524通道關斷時的波形
CH1: 驅動輸人IN 丨 CH2: 驅動輸出OUTA
CH3: 驅動輸出OUTB
圖4顯示了SLM27524兩個通道的輸入閾值。從測試的波形上看,兩個通道的輸入閾值是一致的。
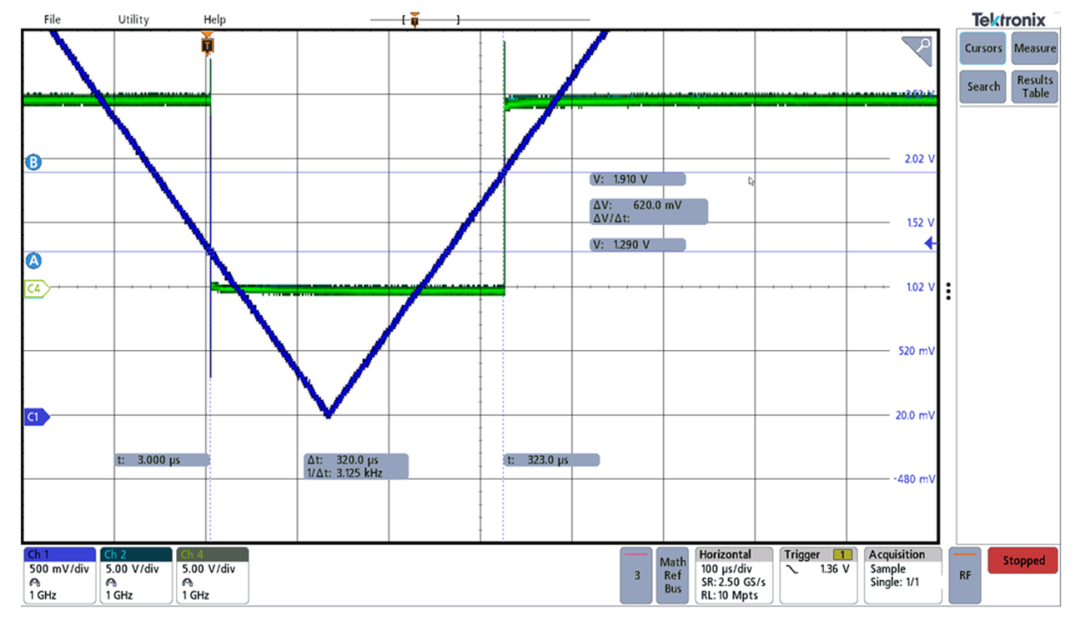
圖 4. SLM27524 輸入閾值門限波形
CH1: 驅動輸人IN 丨 CH2: 驅動輸出OUTA
CH4: 驅動輸出OUTB
為了驗證SLM27524兩個通道直接并聯應用的有效性,人為在兩路輸入信號上加入延時,并按下圖5進行試驗。當改變電阻RA、RB的阻值時,就改變了通道A、B之間的輸入時間差。
圖6到圖9顯示了通道A和通道B在不同的輸入延時情況下的輸出波形。
在一定輸入延時差范圍內,無論是INA超前還是滯后INB,芯片直接并聯仍然正常輸出波形。這說明SLM27524具有較強的魯棒性,能夠容忍一定程度的輸入信號延時差。
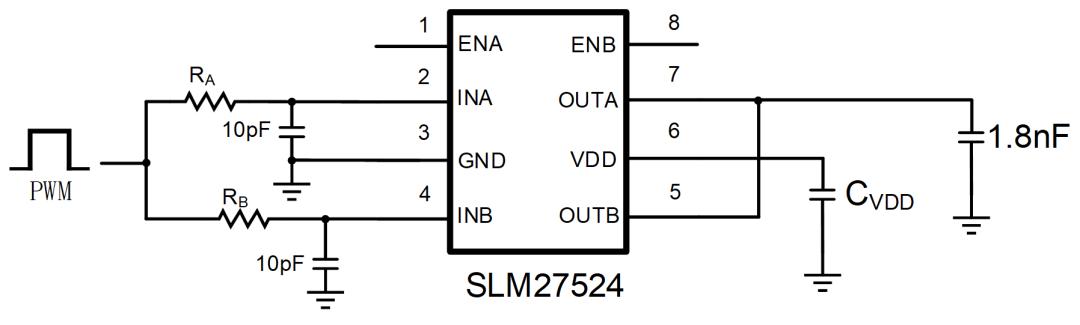
圖 5. SLM27524并聯魯棒試驗電路
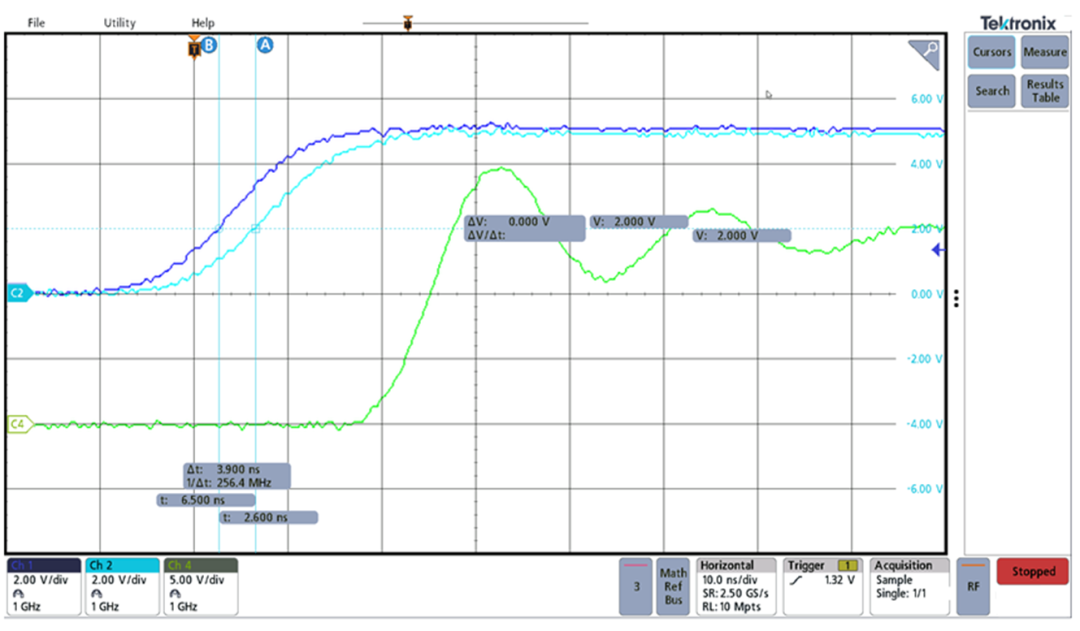
圖 6. SLM27524 INA超前INB 3.9ns并聯波形
CH1: 驅動輸人INA 丨 CH2: 驅動輸入INB
CH4:驅動輸出OUT
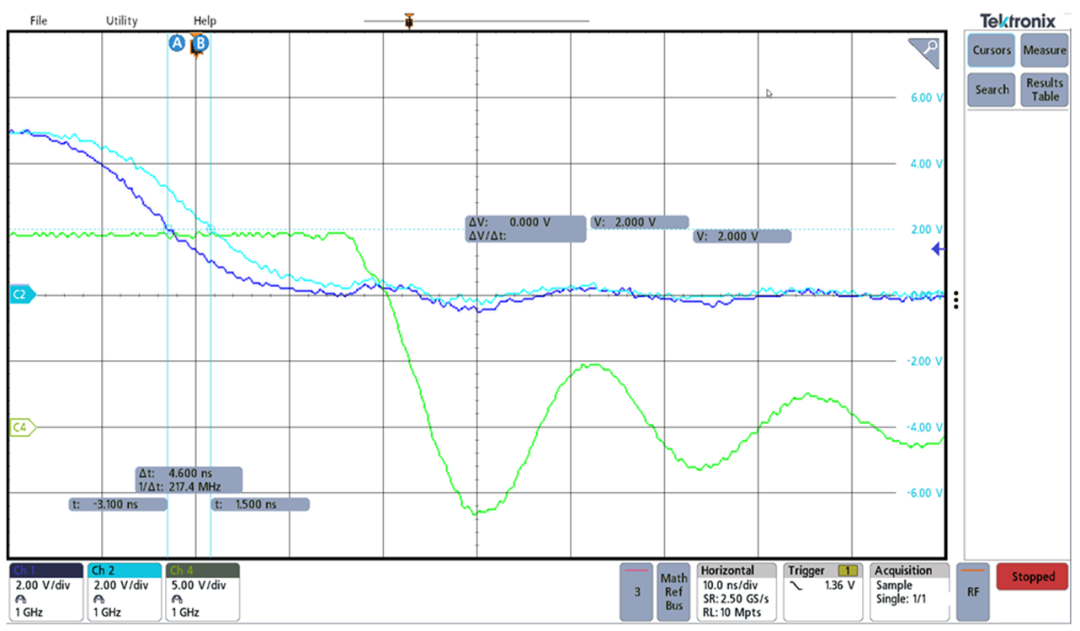
圖 7. SLM27524 INA超前INB 4.6ns并聯波形
CH1: 驅動輸人INA 丨 CH2: 驅動輸入INB
CH4:驅動輸出OUT
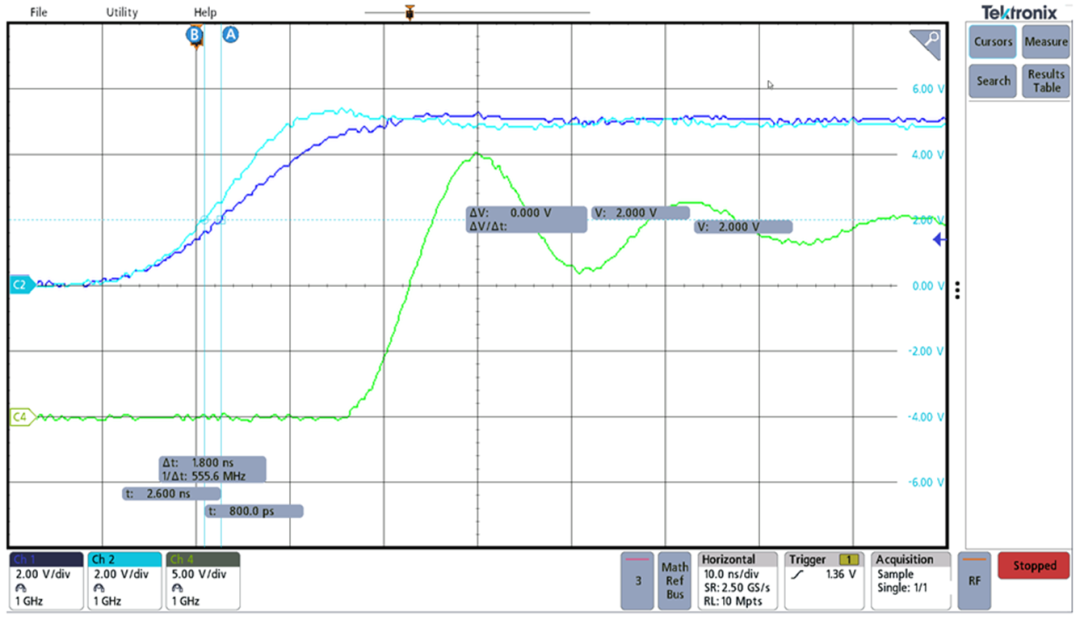
圖 8. SLM27524 INA滯后INB 1.8ns并聯波形
CH1: 驅動輸人INA 丨 CH2: 驅動輸入INB
CH4:驅動輸出OUT
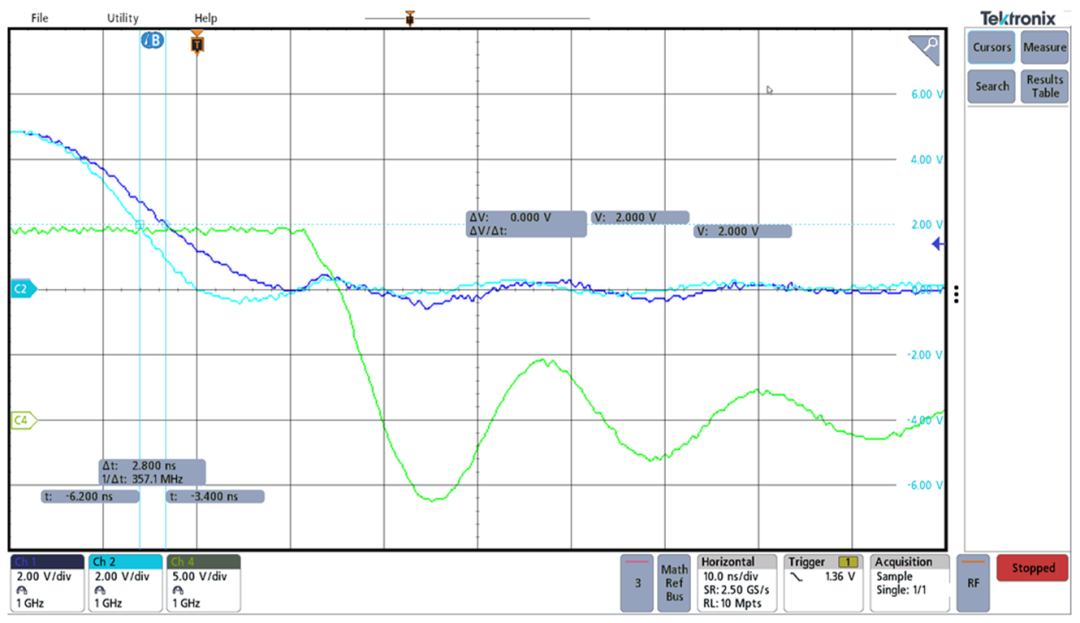
圖 9. SLM27524 INA滯后INB 2.8ns并聯波形
CH1: 驅動輸人INA 丨 CH2: 驅動輸入INB
CH4:驅動輸出OUT
04
驅動芯片并聯應用技巧
在驅動芯片并聯時,外部的一些應用條件和應用技巧也同樣的重要。
首先,對于輸入信號的處理,在PCB上應盡量靠近芯片管腳處進行并聯。如果離芯片管腳距離較遠處并聯后再分開到各個輸入管腳,那就容易存在PCB走線上的延時誤差。
其次,輸入通道的門限閾值不完全一致時,會導致輸出延時不一樣。為了降低此影響,需增強輸入信號的上升下降速度。在使用SLM27524時,推薦輸入信號變化速度不低于50V/us.
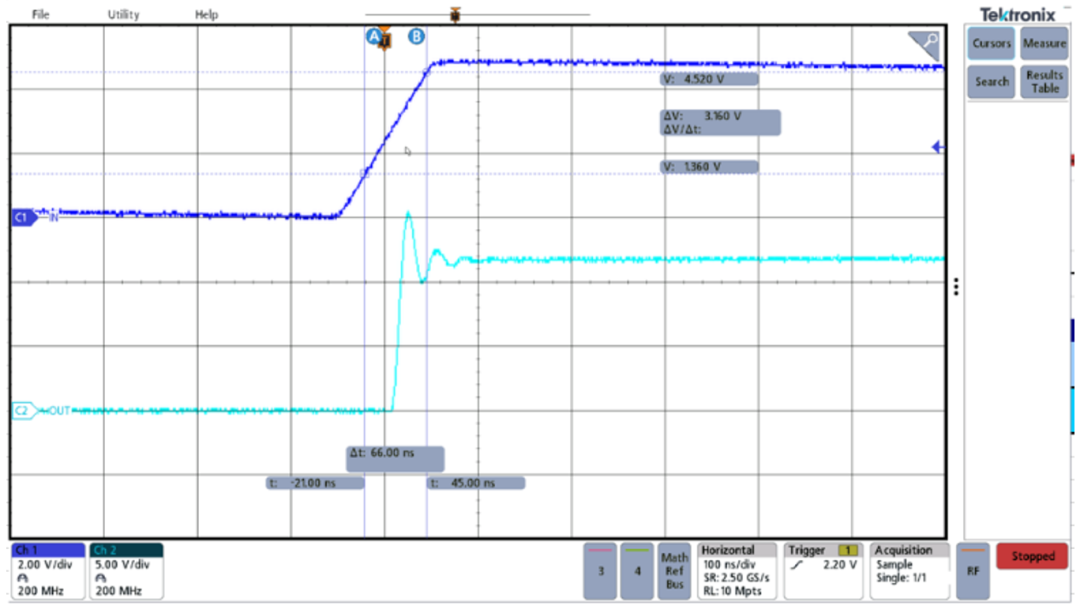
圖 10. SLM27524 47V/us上升波形
CH1: 驅動輸人IN 丨 CH2:驅動輸出OUT
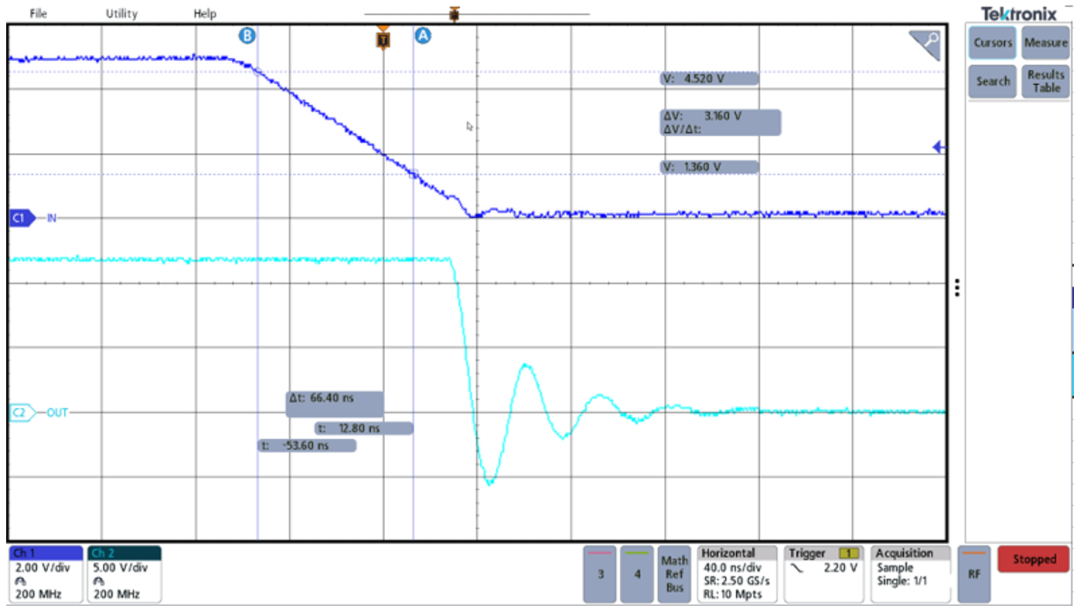
圖 11. SLM27524 47V/us下降波形
CH1: 驅動輸人IN 丨 CH2:驅動輸出OUT
最后,為了更好的使芯片在應用端使用,推薦在輸出端之間串聯電阻后再進行并聯,按如圖12所示。如果需要OUTA,OUTB進行直接并聯,則R1=R2=0。另外可以調整R1,R2參數,限制直通時電流值,保護驅動控制芯片。圖13與圖14顯示了INA,INB之間有17.8ns的延時,如果OUTA,OUTB直接并聯,芯片可能會燒毀,但OUTA,OUTB之間串接5.1Ω電阻,此時能夠保證芯片正常工作而不損壞。
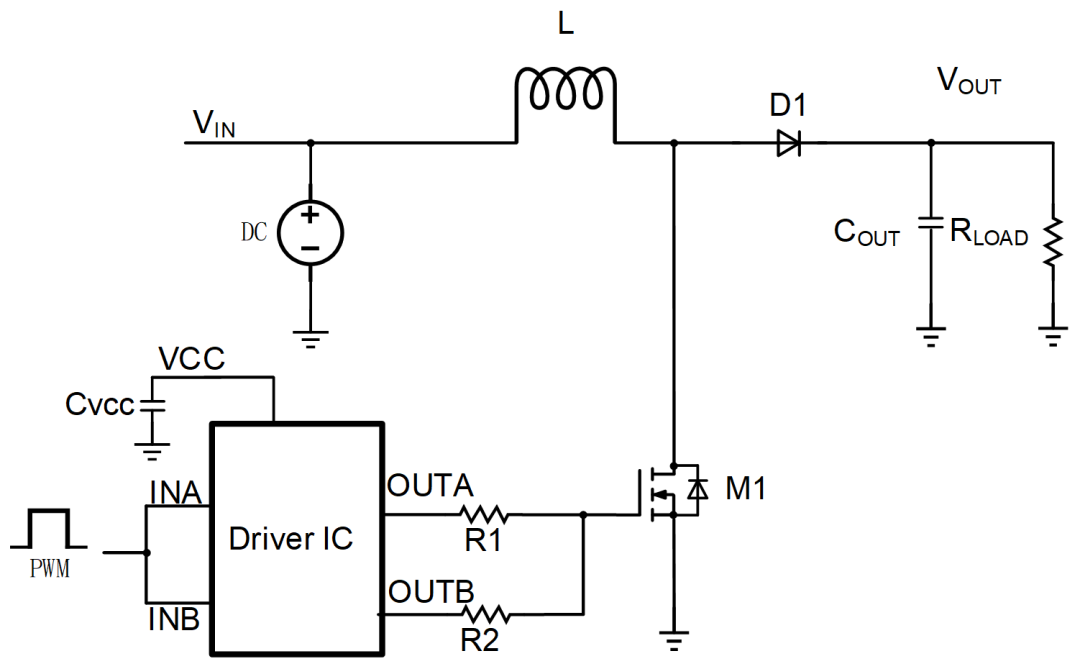
圖 12. 芯片輸出端增加輸出電阻
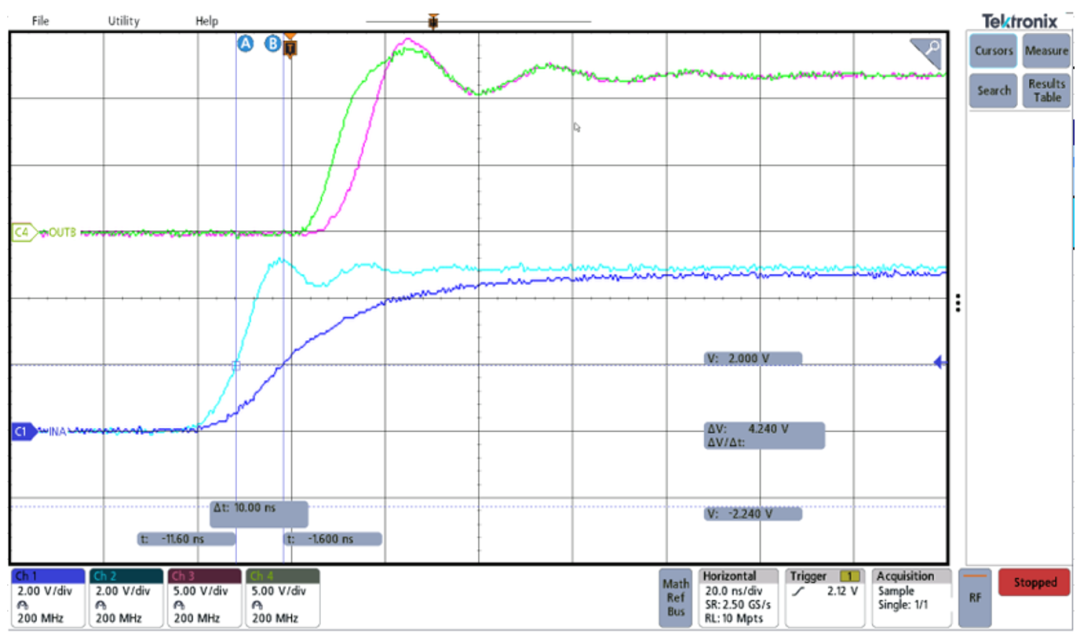
圖 13. SLM27524 INA滯后INB
且OUTA與OUTB串接5.1Ω并聯波形
CH1: 輸人INA 丨 CH2: 輸入INB
CH3:輸出OUTA 丨 CH4:輸出OUTB
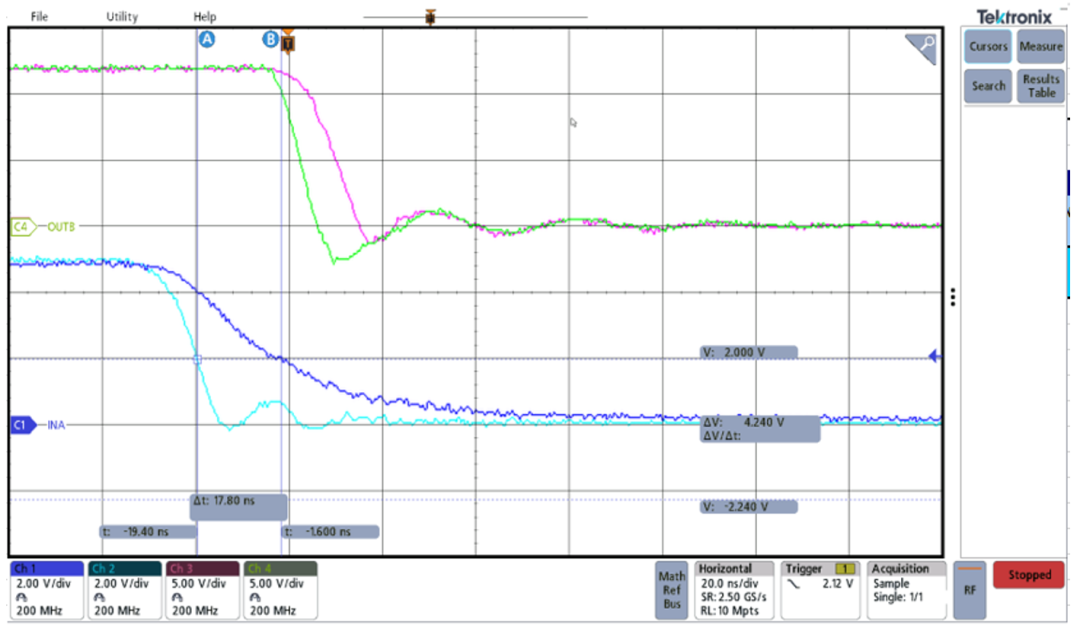
圖 14. SLM27524 INA超前INB
且OUTA與OUTB串接5.1Ω并聯波形
CH1: 輸人INA 丨 CH2: 輸入INB
CH3:輸出OUTA 丨 CH4:輸出OUTB
05
測試總結
綜上所述,在采用驅動芯片并聯去驅動功率管的應用中,除了注意PCB布線布局外,對芯片對稱性有較高要求;另外增大輸入信號變化斜率以及在芯片輸出端串接電阻,可以增強輸出并聯的可靠性。
審核編輯:劉清
-
PFC
+關注
關注
47文章
994瀏覽量
106675 -
PCB布線
+關注
關注
21文章
463瀏覽量
42219 -
校正電路
+關注
關注
2文章
32瀏覽量
27437 -
電子電路
+關注
關注
78文章
1231瀏覽量
67174 -
驅動芯片
+關注
關注
13文章
1322瀏覽量
55174
原文標題:應用筆記 丨 驅動的并聯使用
文章出處:【微信號:數明半導體,微信公眾號:數明半導體】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
二極管反接有電壓嗎?二極管在電子電路中有哪些應用?
MOSFET并聯在高功率設計中的應用

電子電路中的地是什么?什么是數字地和模擬地







 工商網監
工商網監
評論