 一文讀懂自動駕駛汽車:軟硬結合 造就未來出行體驗(上篇)
一文讀懂自動駕駛汽車:軟硬結合 造就未來出行體驗(上篇)
在 GTC 2022 秋季大會上,NVIDIA 汽車部門營銷經理 Katie Burke Washabaugh,面向想要了解自動駕駛汽車、并有志于投身自動駕駛行業的觀眾,介紹了自動駕駛汽車的歷史、工作原理、相關技術以及發展前景。本文對此次分享的精華內容進行了匯總和整理,以幫助大家更好地了解自動駕駛與 AI 行業!
本文將分為上下兩篇,主要包括四個章節:
-
自動駕駛汽車的發展簡介,包括過去十年發生的重大事件以及技術突破。
-
自動駕駛汽車的工作原理,包括車輛中的硬件,如傳感器架構和車載計算,以及車輛中運行的軟件、深度神經網絡等。
-
自動駕駛汽車的訓練與仿真。
-
自動駕駛汽車未來的發展方向,包括“軟件定義汽車”,智能座艙等。
底蘊深厚,路徑明確
在深入了解自動駕駛汽車的歷史之前,先為大家簡要介紹一些專業用詞。
2014 年,美國汽車工程師學會將自動駕駛技術劃分為五個等級,用于描述車輛功能。L1 級和 L2 級表示車輛沒有自動駕駛功能,其中 L1 級表示完全沒有自動駕駛功能,駕駛員需要手動完成車輛中的每一項操作。L2 級則更多涉及主動安全功能和自動化功能,例如自動緊急制動和車道保持輔助,這些功能在如今的車輛中已為大眾所熟知。L3 級則擁有更多 AI 輔助駕駛功能,可讓車輛自行轉向和制動,但人們仍需負責駕駛全程。即使汽車能夠自己轉向和制動,駕駛員也須時刻準備接管控制權。當業內談及自動駕駛汽車時,則主要是在談論 L4 級和 L5 級的自動駕駛汽車。L4 級車輛可以在特定環境下實現完全的自動駕駛,例如,自動駕駛出租車車隊可在礦區、港口、機場、物流園區等封閉區域行駛。L5 級則代表著全自動駕駛,汽車可以隨時隨地進行自動駕駛,完全不需要真人駕駛員進行操作。
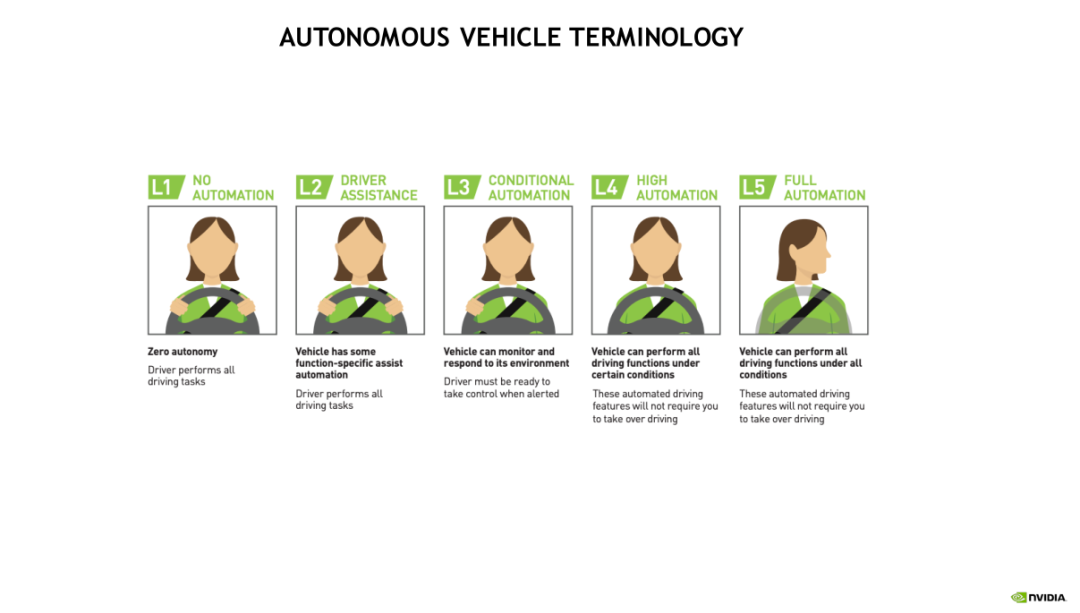
自動駕駛技術分級
早期自動駕駛探索:
算力和速度存在瓶頸
自動駕駛汽車的概念產生至今已有幾十年,科幻作品和電視節目中都曾提及該概念,例如電視劇《霹靂游俠》(Knight Rider)中高度人工智能的跑車 KITT。當前的自動駕駛技術應用主要來源于世界上第一個自動駕駛汽車長距離比賽,“美國無人駕駛挑戰賽”(DARPA Grand Challenge),特別是 2007 年的賽事,將自動駕駛汽車挑戰賽擴展到了一般路面和更多城市環境之中,開啟了自動駕駛產業的起源。
參加 2007 年城市挑戰賽的車輛非常笨重,車輛周身懸掛著多個極其昂貴的傳感器和硬件,同時車輛后備箱里裝滿了電腦設備。這些車輛尚未達到自動化級別,難以在極端環境運行。對于量產型車輛而言,必須擁有 10-11 年以上的使用壽命,并且在使用期需要能夠應對極端高溫、嚴寒、大雪等情況,城市挑戰賽的車輛顯然無法經受密歇根坑洼道路的考驗。城市挑戰賽中的優勝車輛在 4 小時內完成了近 96 千米( 60 英里)路程。事實上,開車是為實現方便高效,在 4 個小時內行駛 96 千米( 60 英里),既不方便也不高效。因此,早期車輛難以投入量產。然而,這些車輛卻推動了自動駕駛技術的快速發展,讓自動駕駛行業能獲得如今的成果。這里有幾個數據希望大家留意,后續我們會比較一下:2007 年的城市挑戰賽中,優勝車輛在 4 個小時內行駛了 96 千米( 60 英里),每秒可進行 230 億次運算(23 billion FLOPS)。
AI 技術突破,自動駕駛如有神助
得益于 AI 技術的突破,所有可移動的事物都將實現自動化。從乘用車、出租車,到商用卡車運輸、再到共享出行、公共交通,更加安全高效的自動駕駛技術正在改變交通運輸行業的各個方面,甚至農業也可通過自動駕駛實現徹底革新。
那么自動駕駛行業提到的 AI 究竟是什么意思呢?具體來說,指的是 AI 的一個子集,即深度學習,可使汽車如同人類一般進行學習和行動。汽車中的軟件則由深度神經網絡(DNN)組成,可驅動特定的任務,如感知、推理、駕駛,或是驅動、高精地圖以及車輛定位,又或者是汽車在空間中精確定位的能力。
為實現現實世界中的安全行駛,自動駕駛深度神經網絡必須能夠根據周圍環境推斷信息,例如,在駕駛過程中,如果看到路上有一個滾落的球,駕駛員根據以往的生活經驗可推斷出,球的后面很可能會跟著一個孩子,由此在通過時會減速稍等一會兒。但是,如何教會汽車以同樣的方式思考和行動呢?答案則是借助海量數據以涵蓋可能遇到的各種情況。DNN 在車輛中運行之前,會在數據中心大規模運行相關數據,并利用仿真對這些情境進行測試和驗證。最后,當這些網絡準備好“上車”時,則需要能夠運行各種神經網絡的集中式高性能計算平臺,保障能實時覆蓋每個必要的任務,以實現安全操作。
技術合力,助力自動駕駛汽車安全高效運行
那么,自動駕駛汽車的工作原理究竟是什么?
傳感器架構“保駕護航”
首先,人們在駕駛時依靠感官來感知周圍環境,眼觀六路,耳聽八方。真人駕駛員會時刻保持對提示物、標識牌以及其他車輛的警惕。自動駕駛汽車則是依靠傳感器獲取感知信息,以在駕駛環境中做出反應。這些傳感器必須具備兩個重要特性,即冗余和多樣化。
“冗余”指的是每個組件都有一個備份,來對傳感器探測到的數據進行查驗,從而確保檢測對象的真實存在。如果攝像頭看到陰影中存在某物,雷達則會進行雙重檢測,從而確保確實有物體存在,就算在攝像頭誤報時,汽車也能從其他傳感器處及時得到真實反饋。
所謂“多樣化”,是指每個組件都能處理在現實世界中運行時所需執行的各種任務。在冗余且多樣化的傳感器架構中,首先需要可充當視覺傳感器的攝像頭傳感器,用于檢測和分類靜態或靜止物體,以及動態或移動物體。上述物體包括交通標志、交通燈、車道邊界,以及行人、騎行者或動物。正如前文所述,此架構中還包含了雷達,可作為備用手段,在必要時替代攝像頭感知外界信息,協助測量周圍物體的距離和移動速度。目前,大家可能已經很熟悉用于其他行業或技術的攝像頭和雷達傳感器,但激光雷達對于部分人而言,可能是一個相對較新的術語。
激光雷達當前的工作原理是將多束激光同時發射到周圍環境中,并接收反射回來的激光。隨后,傳感器會根據激光反射回雷達所用的時間,基于任意兩次激光發射的時間間隔,構建出車輛周圍環境的 3D 圖像。除此之外,此架構還會使用通過聲波進行感知的超聲波設備,以及用于粗略定位和運動補償的 GNSS 和 IMU 傳感器。
AI 計算“智力無限”
上一部分討論了汽車的感知系統,也就是自動駕駛的“眼睛”和“耳朵”。接下來將為大家介紹汽車的“大腦”,即集中式 AI 計算平臺—自動駕駛汽車的計算平臺負責處理由冗余且多樣化的傳感器所采集的大量數據。
正如之前所說,汽車采用冗余且多樣化的傳感器架構,來生成海量數據。直觀地說,一輛用于測試的自動駕駛汽車運行 6 小時就能生成約 32TB 數據,相當于可填滿至少 256 部具有 128GB 內存的智能手機。此外,這種計算還必須能夠運行數十個深度神經網絡,以便在處理數據的同時,為車輛感知系統提供實時支持。
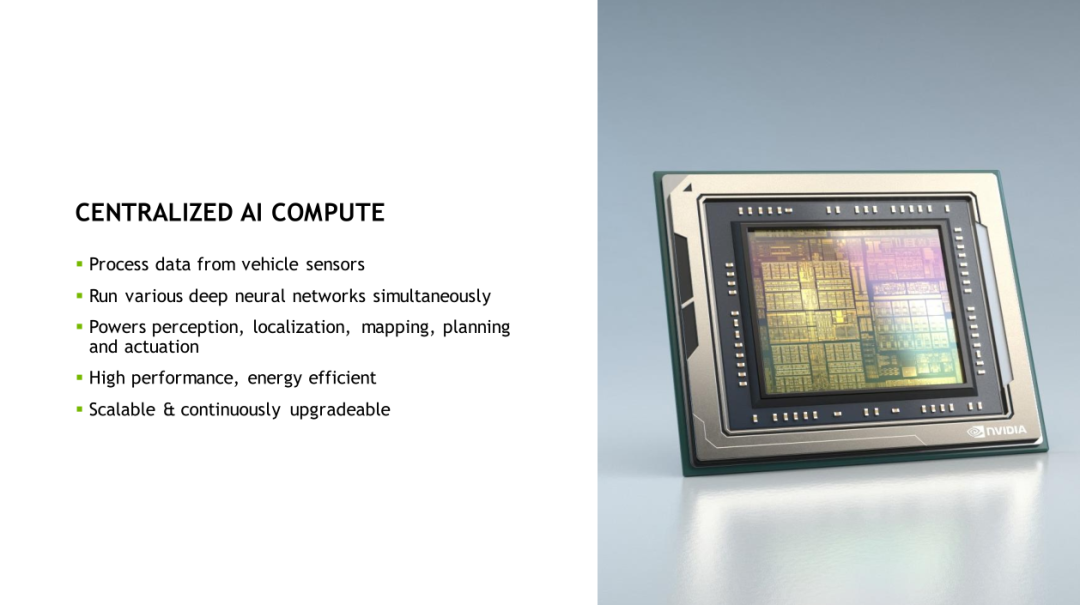
集中式 AI 計算
軟件定義“常用常新”
為應對自動駕駛帶來的挑戰,計算平臺必須具有超高性能,同時滿足節能和車規級要求。所謂車規級要求,是指能夠承受量產型汽車將面對的極端運行條件,以及因長途行車、糟糕路況和極端天氣造成的磨損。此外,該計算平臺還必須具有可擴展性以及持續升級的能力。這里所說的“可擴展性”是指計算平臺能夠與未來的新平臺兼容。計算技術在持續發展,因此軟件開發公司基于當前一代計算技術開發的產品,必須能夠兼容下一代產品,以便能夠充分利用最前沿和最出色的計算性能。而這里所說的“持續升級”,指的是計算平臺需要擁有足夠的空間,允許自動駕駛汽車通過 OTA 持續更新最新功能,從而實現軟件定義汽車,這意味著該計算平臺可基于最新的數據、體驗和功能,持續改進。
NVIDIA DRIVE Orin 是一款適用于自動駕駛汽車的先進的軟件定義平臺。大家還記得上文提到的幾個數字嗎?在 2007 年的城市挑戰賽中,優勝車輛每秒可進行 230 億次運算 (23 billion FLOPS);而現在,DRIVE Orin SoC 每秒可進行 254 萬億次運算(254 TOPS)。憑借當前的性能水平, DRIVE Orin 能夠處理車輛中同時運行的大量應用和深度神經網絡,且符合 ISO 26262 ASIL-D 等系統安全標準。
深度神經網絡 幫助汽車做決策
介紹完汽車的“大腦”之后,我們再來看下文中多次提及的深度神經網絡。深度神經網絡與傳感器一樣,需具備兩個重要特性:冗余且多樣化。這意味著,每個深度神經網絡都能作為其他神經網絡的一個備份,此外,每個深度神經網絡將專門承擔某項任務,以處理自動駕駛汽車在日常駕駛中可能遇到的各種場景。
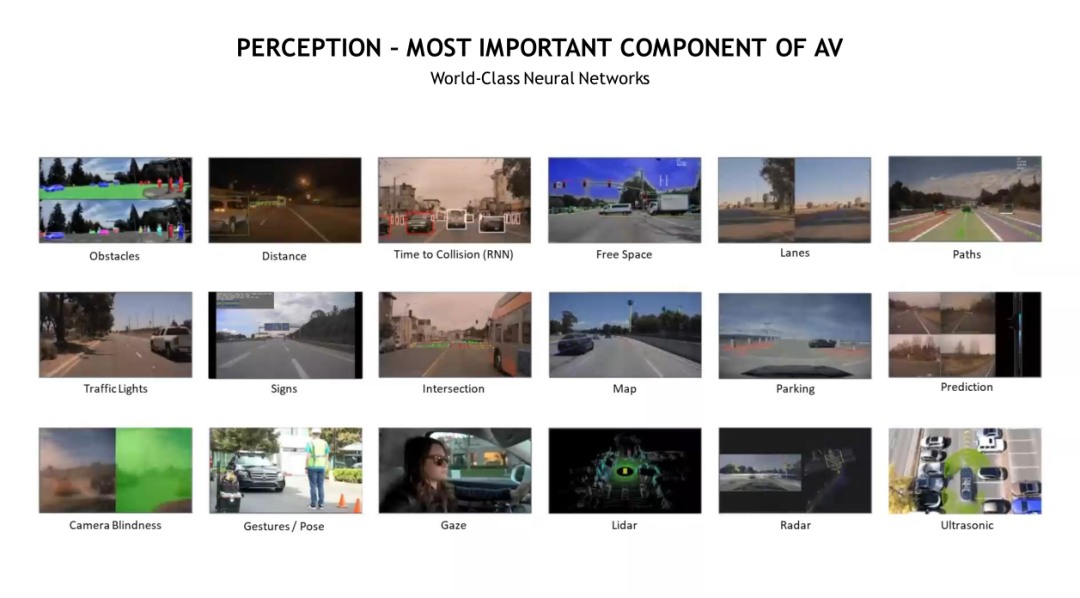
感知—自動駕駛汽車最重要的組成部分
例如,SightNet 深度神經網絡負責檢測交通標志,LightNet 網絡則檢測交通燈,而 LaneNet 網絡則負責檢測車道邊界和可行駛路徑,此外,還有用于檢測交叉路口的 WaitNet 深度神經網絡。前三種網絡會通過協同工作,檢查 WaitNet 網絡所檢測到的交叉路口場景,是否包含該交叉路口中的所有交通燈、交通標志和車道邊界。自動駕駛汽車能夠基于檢查結果做出相應的反應,并安全地通過交叉路口。這些網絡能夠在各種天氣及照明條件下運行。不僅能適應極端天氣,還能應對眩光和攝像頭視野盲區。經過專門訓練的深度神經網絡,能夠應對自動駕駛汽車可能會遇到的各種駕駛狀況,確保汽車安全行駛。
以上是自動駕駛汽車的各個組成部分,但它又是如何學習的呢?這就涉及到自動駕駛汽車的訓練與仿真,我們將在下篇詳細敘述,敬請期待。
AI 賦能交通運輸新時代
AI 揭開物流和出行新篇章
點擊查看往期精彩內容
一:強勢登場:Lucid 集團發布首款電動 SUV Gravity 和新款轎車 Air,基于 NVIDIA DRIVE 打造而成
二:步入 AI 新紀元:全新沃爾沃 EX90 SUV 基于 NVIDIA DRIVE 打造而成
三:容量大,電力足:Polestar 3 為高端電動 SUV 設定新標準
四:智控未來:路特斯 Eletre 搭載 NVIDIA DRIVE Orin,專為極致駕駛體驗和高速 AI 計算而生
五:智能汽車“觸手可及”:哪吒汽車基于 NVIDIA DRIVE Orin 打造 AI 賦能的汽車
六:Hello,World:蔚來通過智能駕乘體驗拓展全球市場
原文標題:一文讀懂自動駕駛汽車:軟硬結合 造就未來出行體驗(上篇)
文章出處:【微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉載請注明出處。
-
英偉達
+關注
關注
22文章
3771瀏覽量
90998
原文標題:一文讀懂自動駕駛汽車:軟硬結合 造就未來出行體驗(上篇)
文章出處:【微信號:NVIDIA_China,微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文聊聊自動駕駛測試技術的挑戰與創新

Lyft攜手Mobileye推動自動駕駛出行服務規模化發展
重塑線控底盤技術:自動駕駛的未來支柱

線路板廠一文詳解PCB軟硬結合板優缺點
自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
小馬智行自動駕駛出行服務接入高德平臺
自動駕駛的未來之路:智能網聯與單車智能的交融
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
理想汽車加速自動駕駛布局,成立“端到端”實體組織
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
邊緣計算與自動駕駛系統如何結合





 工商網監
工商網監
評論