 其他類型機器人抓手相比使用電動抓手的五大優勢
其他類型機器人抓手相比使用電動抓手的五大優勢
在電動夾爪或伺服夾爪中,電動機通過機器人控制器的電輸入來控制鉗口的運動。這些機器人手臂末端工具在工業市場中越來越多地出現。以下是與其他類型的機器人抓手相比使用電動抓手的五大優勢。
1、控制抓手手指的位置
通過使用編碼電機和適當的控制方案,可以使用電動夾具來確定鉗口的位置。相反,對于傳統的抓手,通常必須一直保持全行程。使用電動抓手時,可以靈活地僅使用最小的必要間隙來接近零件,然后進行最小的行程來拾取它。部分打開和關閉有助于選擇更大范圍的零件尺寸,而又不影響生產周期。
2、控制抓地力和速度
由于電動機電流與施加的轉矩成正比,因此可以控制the紙牙施加的grip紙力。閉合速度也是如此。例如,在處理易碎零件時,這可能會很有幫助。
3、無氣管:節省電力和維護費用
許多公司正在從氣動轉向電動,以降低運營成本。這一轉變的一個重要方面是降低了氣動硬件的成本和降低了能源成本。
4、檢測握力
使用編碼器,可以確定抓爪是否拾取了零件。一些電動抓具會將這些信息傳遞回機器人控制器。在許多應用中,為了防止錯誤,必須檢測手柄。在抓取器級別進行此操作可避免將其他傳感器放入回路中,簡化集成并降低總體成本。 
5、更清潔的抓手
某些應用需要清潔的環境,否則漏氣可能會導致污染。在這種情況下,電動抓爪是唯一可行的拾取零件的解決方案。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
電動機
+關注
關注
74文章
4109瀏覽量
96202
原文標題:工業機器人搭配伺服電動夾爪的五大優勢
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
醫療機器人有哪些_醫療機器人有哪些應用
醫療機器人是醫用機器人工程的重要應用,結合了各個學科最新研究和發展的成果,并廣泛應用于醫學診療、康復等醫學領域。醫療機器人的類型多種多樣,以下是主要的一些
機器人仿真的類型和優勢
機器人仿真使機器人工程師和研究人員能夠創建機器人及其環境的虛擬模型。這項技術支持在仿真的無風險環境中測試和驗證機器人設計與控制算法以及與各種元素進行交互。通過使用仿真軟件,可以預測和分

工業機器人常用的編程方式
工業機器人的編程是確保機器人能夠執行特定任務的關鍵步驟。編程方式多種多樣,每種方式都有其特定的應用場景和優勢。 工業機器人編程概述 工業機器人

MT6825 磁編碼 IC:全自動搬運抓手系統的關鍵力量
一、引言 在現代工業生產中,自動化程度的不斷提高成為了提升生產效率、保證產品質量的關鍵。全自動搬運抓手系統作為自動化生產線中的重要環節,其性能的優劣直接影響著整個生產流程的順暢與高效。而

國產工業機器人與進口機器人區別有哪些
? ? ? ? ? 國產工業機器人與進口機器人相比,技術性能。國產機器人技術水平不斷提高,但與國際先進水平相比仍有一定差距。 價格。國產
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多
發表于 07-05 08:52
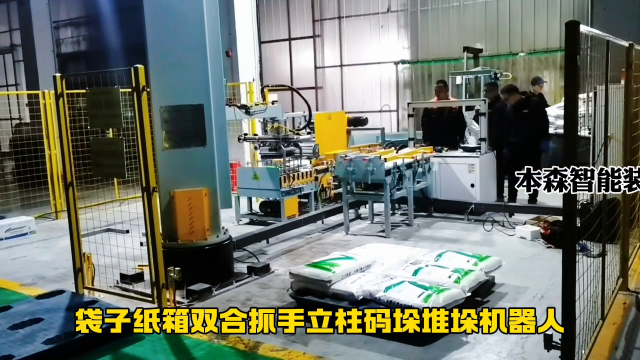
碼垛機器人紙箱碼垛優勢
隨著科技的不斷進步,越來越多的行業開始引入機器人技術以提高生產效率和降低成本。在物流、倉儲和制造業中,碼垛機器人已成為不可或缺的一部分。特別是在紙箱碼垛領域,碼垛機器人展現出了其有的優勢
國際機器人聯合會(IFR)近期發布2024全球五大機器人趨勢
國際機器人聯合會(IFR)近日列出今年的全球五大機器人趨勢,并將對自動化日益增長的需求歸因于技術創新。
AGV機器人的五大優勢與發展現狀
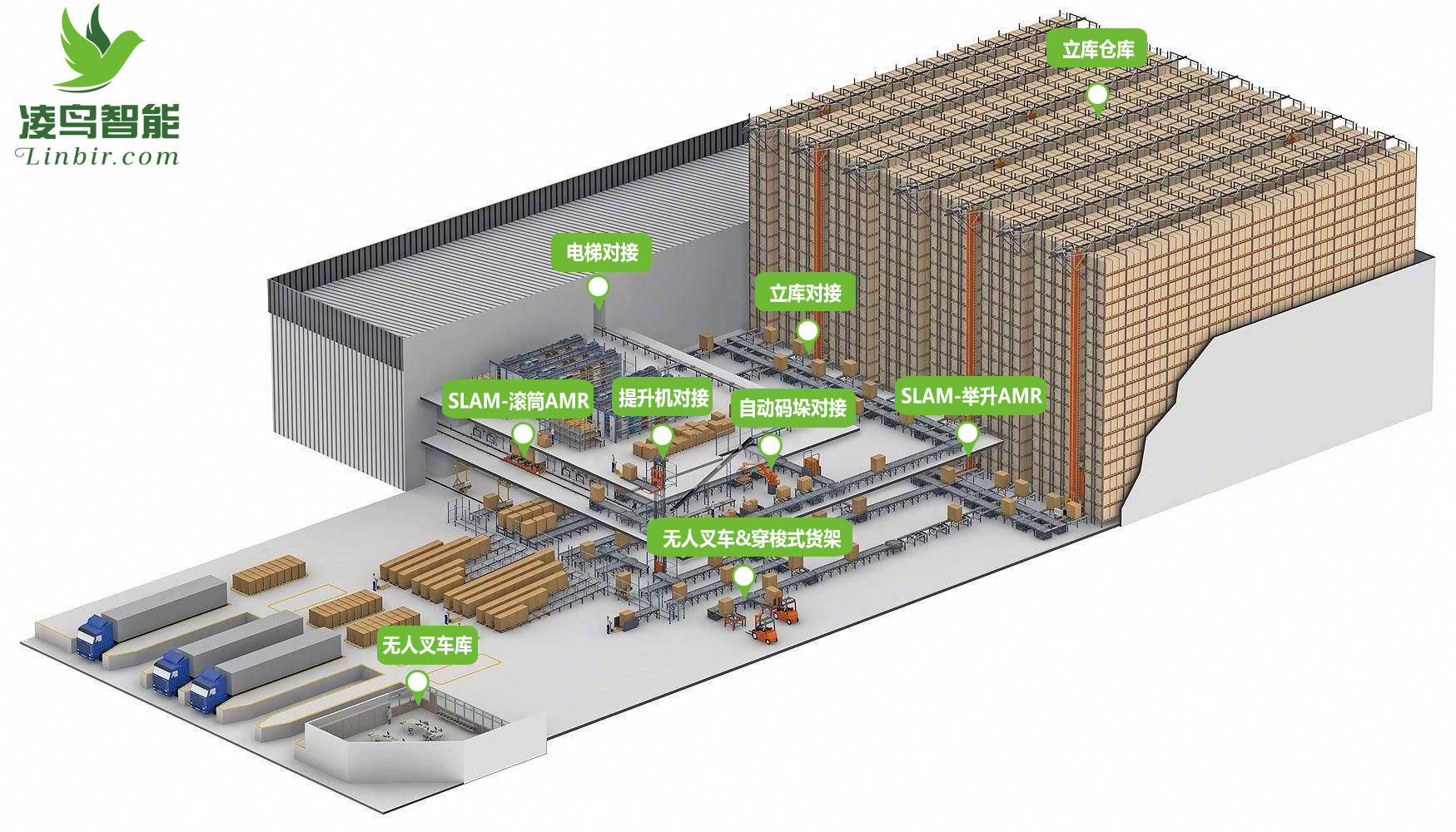
“中國制造2025”正在路上。 中國自動化產品與技術應用正迎來市場化的春天。 AGV智能立庫 隨著機器人時代的到來,各行各業逐漸開始使用智能機器人來代替人工,降低人工成本,提高生產效率。像傳統的倉庫






 工商網監
工商網監
評論