") 新一代汽車(chē)數(shù)據(jù)網(wǎng)絡(luò)的穩(wěn)健連接解決方案
新一代汽車(chē)數(shù)據(jù)網(wǎng)絡(luò)的穩(wěn)健連接解決方案
隨著自動(dòng)駕駛的發(fā)展和越來(lái)越多的自動(dòng)駕駛功能,車(chē)輛中的高速數(shù)據(jù)傳輸通道與車(chē)輛安全的相關(guān)性越來(lái)越大。這意味著車(chē)輛零部件需要全新的設(shè)計(jì)特征,并且OEM必須在架構(gòu)定義和通信協(xié)議選擇期間考慮物理通道屬性的限制。
01
新一代汽車(chē)架構(gòu)A.分散與融合的架構(gòu)方法 現(xiàn)代豪華車(chē)可以包含多達(dá)100個(gè)基于多個(gè)專(zhuān)有操作系統(tǒng)的電子控制單元(ECU)。這涵蓋了簡(jiǎn)單的控制程序、復(fù)雜的實(shí)時(shí)多功能操作系統(tǒng),或支持日益復(fù)雜的信息娛樂(lè)和駕駛員輔助系統(tǒng)等的嵌入式平臺(tái)。 作為完全自動(dòng)駕駛系統(tǒng)的“前身”,今天,高級(jí)駕駛員輔助系統(tǒng)(ADAS)的數(shù)量和復(fù)雜性正在不斷增加,這導(dǎo)致基于ECU的傳統(tǒng)架構(gòu)負(fù)載已接近極限。因此,OEM需要開(kāi)發(fā)新的解決方案,用以管理更高復(fù)雜性和數(shù)據(jù)吞吐量。通過(guò)將功能聚合到域并融合ECU,OEM可以?xún)?yōu)化線束的重量并降低連接復(fù)雜性。這可以減少所需組件的數(shù)量和總體成本。經(jīng)典的分散架構(gòu)方法和全新的融合架構(gòu)方法之間的區(qū)別如圖1所示。
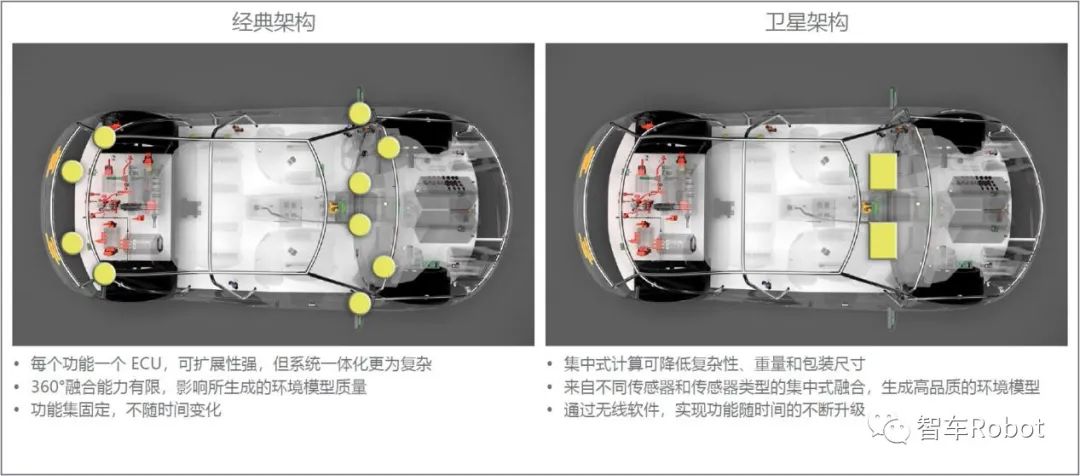
圖1:經(jīng)典架構(gòu)與衛(wèi)星架構(gòu) B.面向服務(wù)的架構(gòu) 在高速數(shù)據(jù)連接和計(jì)算性能方面,ADAS應(yīng)用集成是OEM在設(shè)計(jì)車(chē)輛架構(gòu)時(shí)面臨的最大挑戰(zhàn)之一。高分辨率攝像機(jī)和高性能傳感器(如RADAR和LIDAR)生產(chǎn)并需求大量數(shù)據(jù)。在車(chē)內(nèi),數(shù)據(jù)必須由強(qiáng)大的計(jì)算系統(tǒng)處理并遠(yuǎn)距離傳輸。出于安全原因,ADAS集群具有冗余計(jì)算平臺(tái)。高優(yōu)先級(jí)ADAS數(shù)據(jù)也會(huì)傳輸?shù)脚cADAS系統(tǒng)物理分離的輔助計(jì)算平臺(tái)。如果ADAS完全宕機(jī),該數(shù)據(jù)可用于激活緊急模式,以使車(chē)輛安全停車(chē)。 圖2顯示了可以在新一代車(chē)輛數(shù)據(jù)網(wǎng)絡(luò)架構(gòu)中實(shí)現(xiàn)的不同網(wǎng)絡(luò)技術(shù)的融合。作為主要控制單元,高速計(jì)算域需要對(duì)稱(chēng)、穩(wěn)健、易于實(shí)施且標(biāo)準(zhǔn)化的網(wǎng)絡(luò)技術(shù),以及高性能的骨干連接,如以太網(wǎng)。
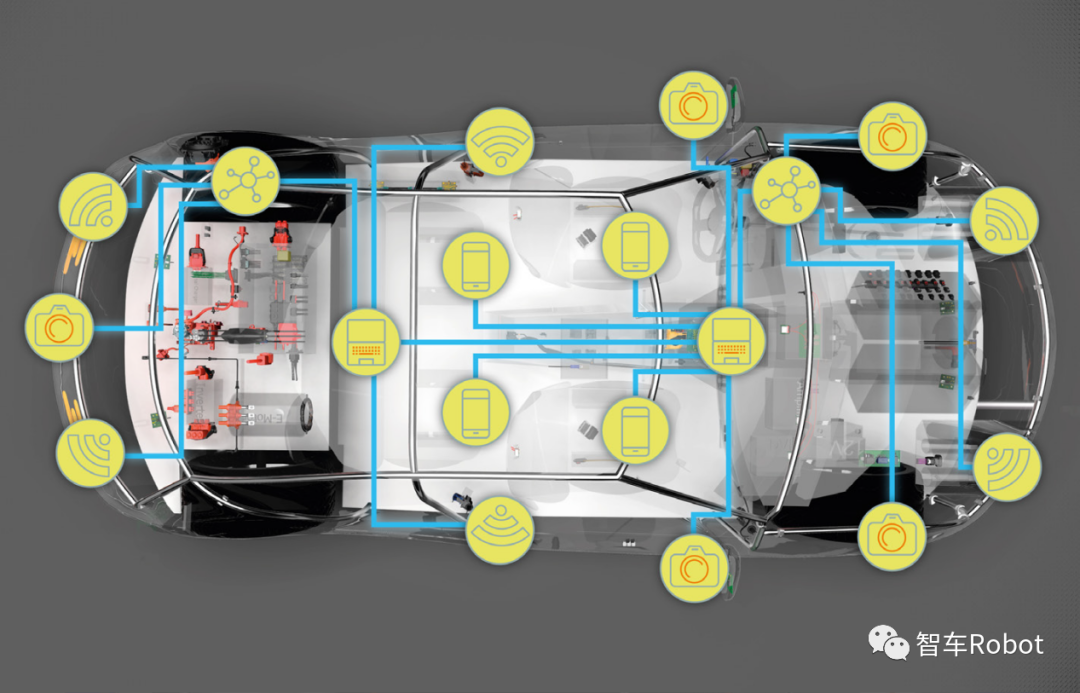
圖2-網(wǎng)絡(luò)技術(shù) 攝像機(jī)和顯示器通常需要具有單向高速數(shù)據(jù)速率的非對(duì)稱(chēng)鏈路。對(duì)于這些連接,近年來(lái)已經(jīng)建立了由序列化器和反序列化器芯片組構(gòu)成的簡(jiǎn)易化物理層。通常,其他傳感器和執(zhí)行器需要更低的數(shù)據(jù)速率,因此能夠使用更具成本效益且十分成熟的總線技術(shù),如CAN(-FD)或LIN。實(shí)現(xiàn)不同網(wǎng)絡(luò)技術(shù)和協(xié)議之間數(shù)據(jù)傳輸?shù)木W(wǎng)關(guān)將在這些新架構(gòu)概念中發(fā)揮重要作用。
02
面向下一代汽車(chē)的通信技術(shù)A.異構(gòu)高速芯片格局和標(biāo)準(zhǔn)化趨勢(shì) 多年來(lái),汽車(chē)行業(yè)早已部署了以太網(wǎng),目的是實(shí)現(xiàn)診斷并為信息娛樂(lè)系統(tǒng)提供支持。通過(guò)增添確定性時(shí)序功能,以太網(wǎng)的應(yīng)用范圍可顯著擴(kuò)大。例如,為降低成本,以太網(wǎng)可用作域間控制器網(wǎng)絡(luò)的網(wǎng)絡(luò)骨干介質(zhì),并用于代替現(xiàn)有串行網(wǎng)絡(luò)(如MOST和FlexRay)。 以太網(wǎng)在架構(gòu)設(shè)計(jì)方面具有靈活性,支持線形、星形和混合ECU連接結(jié)構(gòu)。因此,它被認(rèn)為是汽車(chē)應(yīng)用中眾多拓?fù)渑渲玫氖走x方案。 不過(guò),由于最初的以太網(wǎng)標(biāo)準(zhǔn)不是針對(duì)時(shí)間或安全關(guān)鍵型應(yīng)用而創(chuàng)建的,其在汽車(chē)應(yīng)用領(lǐng)域的適用性已成為電氣與電子工程師協(xié)會(huì)(IEEE)多個(gè)工作組的焦點(diǎn),他們致力于增添特別適用于汽車(chē)環(huán)境的功能。 最初用于建筑物的以太網(wǎng)電纜非常厚,具有雙屏蔽層,而且相當(dāng)不靈活。后來(lái)采用的是更輕便、更具成本效益的非屏蔽雙絞線電纜,這使得以太網(wǎng)在汽車(chē)市場(chǎng)越來(lái)越具有吸引力。 100BASE-T1 BroadR-Reach推出并推廣了最高數(shù)據(jù)速率可達(dá)100Mbps的100BASE-T1以太網(wǎng)技術(shù)。此項(xiàng)技術(shù)得到了OPEN聯(lián)盟特別興趣小組的進(jìn)一步支持,包括不同OEM以及ECU、芯片和連接器供應(yīng)商。100/1000BASE-T1的可行應(yīng)用包括:連接到具有360度全景視圖的后視攝像頭、基于雷達(dá)和激光雷達(dá)的防撞系統(tǒng)以及駕駛員駕駛艙系統(tǒng)和信息娛樂(lè)解決方案。
2017年,IEEE成立了新的工作組,旨在將汽車(chē)以太網(wǎng)數(shù)據(jù)速率提高到千兆級(jí)別。NGAUTO工作組正在開(kāi)發(fā)適合數(shù)據(jù)速率為2.5、5和10Gbps的全雙工屏蔽差分電纜的千兆位標(biāo)準(zhǔn)(IEEE P802.3ch)。10Gbps以太網(wǎng)標(biāo)準(zhǔn)的最新進(jìn)展包括初步通道規(guī)范的建立。 該規(guī)范根據(jù)適用的汽車(chē)級(jí)電纜以及通道分析數(shù)據(jù)(由作為該聯(lián)盟的積極參與者的TE提供),將使用的通道帶寬限制為4GHz(用于回波損耗和插入損耗)以及5.5GHz(用于耦合衰減)。 對(duì)于高分辨率攝像頭和顯示器連接,近幾年OEM并沒(méi)有選擇部署全面覆蓋式的以太網(wǎng),而是選擇了由發(fā)送器側(cè)的串行器芯片和接收器側(cè)的解串器(“SerDes”)組成的非對(duì)稱(chēng)點(diǎn)對(duì)點(diǎn)鏈路。采用APIX II、GMSL、FPD IIILink的最新一代產(chǎn)品可基于單根同軸電纜或差分電纜實(shí)現(xiàn)高達(dá)3Gbps的數(shù)據(jù)速率。2019-2020年,OEM將首次在汽車(chē)架構(gòu)中應(yīng)用采用此技術(shù)的下一代產(chǎn)品。 OEM可在一個(gè)通道上實(shí)現(xiàn)高達(dá)6Gbps的數(shù)據(jù)速率,或者在組合兩個(gè)通道的情況下實(shí)現(xiàn)12Gbps的數(shù)據(jù)速率。與以太網(wǎng)不同,SerDes協(xié)議尚未標(biāo)準(zhǔn)化。因此,芯片供應(yīng)商即將推出多種專(zhuān)利解決方案,這些解決方案通常彼此不兼容。許多OEM以及設(shè)備和芯片制造商已開(kāi)始致力于實(shí)現(xiàn)標(biāo)準(zhǔn)化,其中汽車(chē)顯示屏和攝像頭鏈路是重中之重,目的是減少市場(chǎng)上不兼容SerDes型號(hào)的數(shù)量。 SerDes IC通常支持用于攝像頭和顯示屏的同軸電纜和差分電纜。與以太網(wǎng)相比,SerDes系統(tǒng)提供非對(duì)稱(chēng)鏈路,這表示一個(gè)方向(下游通道)的數(shù)據(jù)速率遠(yuǎn)高于另一個(gè)方向(上游通道)的數(shù)據(jù)速率。對(duì)于此類(lèi)應(yīng)用,該配置已經(jīng)足夠,因?yàn)閿z像頭會(huì)提供高速數(shù)據(jù),但只接收具有更低數(shù)據(jù)速率的控制信號(hào)。而在另一邊,顯示單元為高速數(shù)據(jù)的接收器,但發(fā)送到ECU的僅為控制信號(hào)。(例如在使用觸摸屏功能的情況下) 這種非對(duì)稱(chēng)方法降低了物理復(fù)雜性和回波損耗方面的通道要求。因此,與具有相同數(shù)據(jù)速率且基于全雙工以太網(wǎng)的實(shí)現(xiàn)相比,OEM可創(chuàng)建更具成本效益且特定于應(yīng)用的系統(tǒng)。為此,下一代架構(gòu)可能兼具以太網(wǎng)和SerDes。 B.基于芯片實(shí)現(xiàn)和通道的系統(tǒng)性能 圖3所示為完整的數(shù)據(jù)通信系統(tǒng),其中包括物理層(PHY)內(nèi)的通道和收發(fā)器芯片組(集成電路,即IC)。通道包含兩個(gè)連接器(PCB連接器)和各種電纜段(具體取決于鏈路拓?fù)洌@些電纜段通過(guò)中間連接器連接。系統(tǒng)的最大可用數(shù)據(jù)速率由芯片復(fù)雜度和通道復(fù)雜度共同決定。
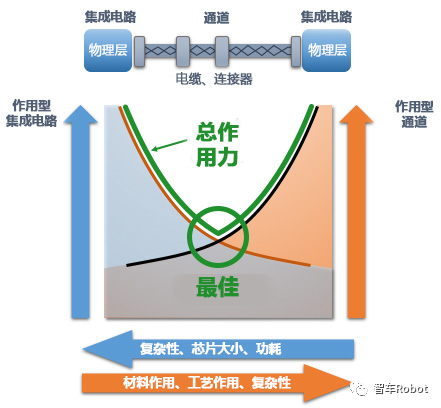
圖3 如想降低芯片組的成本、尺寸和功耗,可以通過(guò)簡(jiǎn)單調(diào)制(例如,具有兩個(gè)幅值的脈沖幅度調(diào)制,即PAM-2)降低均衡、濾波或數(shù)字信號(hào)處理的復(fù)雜度。然而,要利用此類(lèi)低復(fù)雜度方法來(lái)達(dá)到高數(shù)據(jù)速率,需要大帶寬下具有低衰減和線性頻率響應(yīng)的寬帶通道。 系統(tǒng)供應(yīng)商經(jīng)常遇到以下情況:通道僅提供有限帶寬,頻率響應(yīng)呈非線性或通道組件引起強(qiáng)回聲。可通過(guò)在芯片級(jí)增加實(shí)現(xiàn)復(fù)雜度來(lái)應(yīng)對(duì)此類(lèi)次優(yōu)場(chǎng)景。 為此,整個(gè)系統(tǒng)開(kāi)發(fā)聯(lián)盟的各方必須對(duì)芯片復(fù)雜度和通道復(fù)雜度之間的權(quán)衡加以分析,以便確定平衡解決方案,優(yōu)化系統(tǒng),從而實(shí)現(xiàn)目標(biāo)數(shù)據(jù)速率。例如,TE Connectivity和Fraunhofer Institute IIS根據(jù)汽車(chē)要求(例如鏈路長(zhǎng)度為10-15m的拓?fù)洹MI性能、信號(hào)完整性和IC實(shí)現(xiàn)限制)進(jìn)行了通道容量分析。此研究的目的是評(píng)估可用汽車(chē)通道的最大數(shù)據(jù)速率。
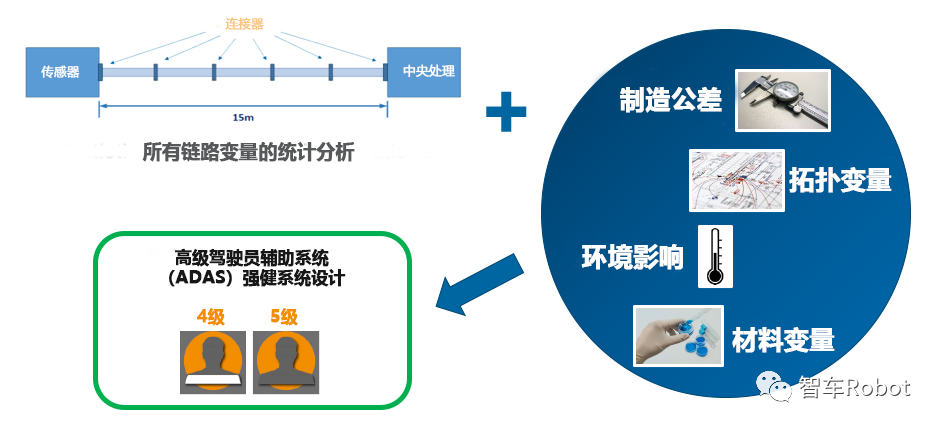
圖4
03
高性能通道設(shè)計(jì)的連接器穩(wěn)健性 隨著ADAS系統(tǒng)的功能級(jí)別變得越來(lái)越復(fù)雜,攝像頭和傳感器數(shù)據(jù)鏈路的性能和可靠性變得越來(lái)越重要。 同時(shí),高數(shù)據(jù)速率可充分利用通信鏈路的數(shù)據(jù)容量和芯片側(cè)更復(fù)雜的物理層實(shí)現(xiàn)。隨著市場(chǎng)需求不斷推動(dòng)解決方案逼近物理限制,實(shí)際系統(tǒng)性能已越來(lái)越接近物理極限。 因此,組件開(kāi)發(fā)人員的穩(wěn)健性評(píng)估和對(duì)所有關(guān)鍵容差的考量,變得越來(lái)越重要。此外,所需帶寬較大時(shí),鏈路預(yù)算較低,在進(jìn)行與組件選擇和最大鏈路長(zhǎng)度相關(guān)的架構(gòu)設(shè)計(jì)時(shí),自由度會(huì)受到限制。 圖5所示為典型的汽車(chē)以太網(wǎng)鏈路示例。左側(cè)在理想實(shí)驗(yàn)室條件下測(cè)得的通道性能是一個(gè)很好的例子,可證明鏈路性能和應(yīng)用限制線之間的差距較大。
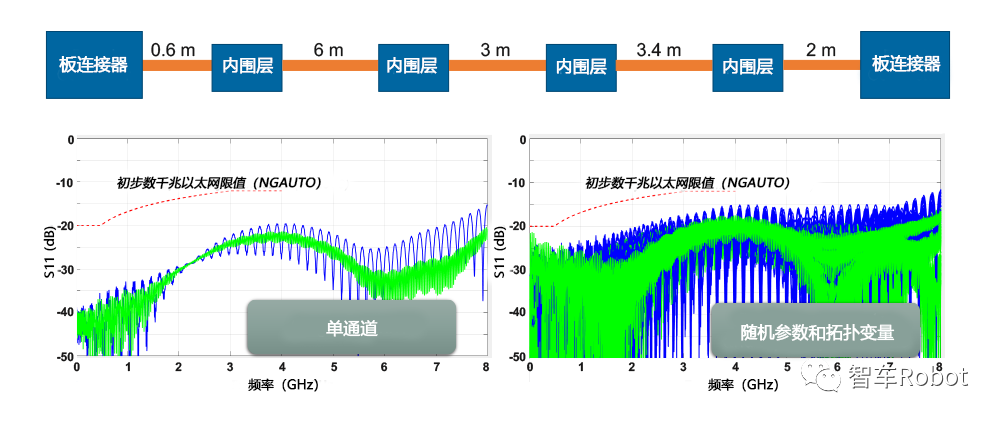
圖5 但是,當(dāng)考慮所有元件公差(例如,電纜和連接器阻抗)與環(huán)境影響(例如,溫度影響、濕度和老化)時(shí),差距會(huì)大大減小,如右側(cè)曲線陣列所示。因此,必須在系統(tǒng)設(shè)計(jì)過(guò)程中綜合考慮所有這些系統(tǒng)參數(shù),以便在考慮了所有上述影響的最差情況下也能滿足應(yīng)用要求。
04
可用通道B的帶寬與長(zhǎng)度限制 為了計(jì)算通信通道上可達(dá)到的最大數(shù)據(jù)速率,使用Shannon-Hartley數(shù)據(jù)容量定義定理,如表達(dá)式(1)所示:

表達(dá)式(1)以bit/s為單位描述通道的數(shù)據(jù)容量(C),其中高斯白噪聲作為基于信號(hào)(S)和噪聲(N)功率的給定頻率帶寬(BW)。按帶寬標(biāo)準(zhǔn)化表達(dá)式(1),得到上面表達(dá)式(2)所示的數(shù)據(jù)容量密度(C',單位為bit/s/Hz),即可計(jì)算噪聲功率分布與高斯白噪聲不同的實(shí)際通道的數(shù)據(jù)容量。
隨后可對(duì)信噪比進(jìn)行數(shù)值計(jì)算,以獲得足夠小的離散頻率帶寬步長(zhǎng),從而假定其中的高斯白噪聲。此計(jì)算的基礎(chǔ)是圖6所示的通道模型。總噪聲功率密度(PD Ntotal)是所有干擾的總和。在當(dāng)前的研究中考慮了外部EMI源(PDEMI)、雙工操作模式下的上游信號(hào)(PD Txup)和其他干擾(PD N),例如接收器噪聲。通道插入損耗函數(shù)(IL)也可以反向包括在總噪聲功率密度內(nèi)。 通過(guò)這種方式,可以利用成形發(fā)射器信號(hào)功率密度(PD Txshaped)和總噪聲來(lái)輕松地計(jì)算數(shù)據(jù)容量密度。成形發(fā)射器信號(hào)功率密度可以通過(guò)使用圖7所示的注水算法(注水算法是通信信道均衡策略通信系統(tǒng)設(shè)計(jì)和實(shí)踐中思想的總稱(chēng)。顧名思義,正如水即使在具有多個(gè)開(kāi)口的容器的一部分中也能找到其液位一樣,由于帕斯卡定律,通信網(wǎng)絡(luò)中繼器或接收器中的放大器系統(tǒng)將每個(gè)通道放大到所需的功率水平,以補(bǔ)償通道損傷)來(lái)確定。
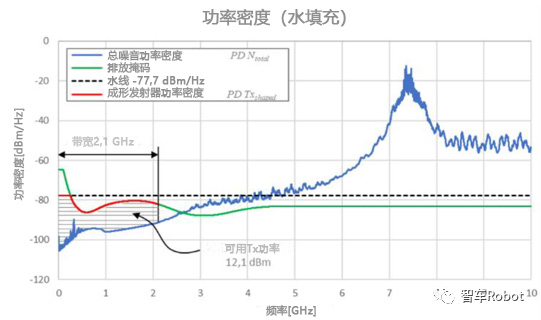
圖7 從最低級(jí)別開(kāi)始,該迭代方法試圖通過(guò)以超過(guò)噪聲功率的方式分配可用發(fā)射器(Tx)功率來(lái)確定功率密度函數(shù)。可以將該過(guò)程比擬成向池塘注水,其中噪聲功率密度標(biāo)記為池塘的底部。當(dāng)所有可用功率耗盡時(shí),算法完成。在此研究中,EMI輻射掩蔽用作額外約束,以確保滿足汽車(chē)EMI要求。 掩蔽標(biāo)記了注水算法允許的最大發(fā)射器功率密度。它是通過(guò)將汽車(chē)排放限值除以EMI出口傳遞函數(shù)(TFE)來(lái)計(jì)算的。圖7對(duì)相關(guān)算法進(jìn)行了說(shuō)明。 總的可用發(fā)射器功率取決于最大驅(qū)動(dòng)器電壓和通道阻抗。使用3.3V CMOS技術(shù)和差分信號(hào)的100Ω阻抗或同軸電纜的50Ω阻抗進(jìn)行數(shù) 據(jù)容量分析。系統(tǒng)開(kāi)發(fā)人員必須考慮雙工操作模式下的額外余量需求,以確保發(fā)送(下游)電壓和接收(上游)信號(hào)的疊加不超過(guò)電源電壓。 進(jìn)行12.1dBm發(fā)射器平均功率的典型計(jì)算時(shí),可得到100Ω差分對(duì)應(yīng)電纜上的峰值電壓為2.5V。峰值和平均(rms)功率之間的比率取決于調(diào)制格式,估計(jì)為6dB。此峰值電壓仍支持相反方向上數(shù)據(jù)速率不對(duì)稱(chēng)且發(fā)射器功率降低的雙工操作。在此示例中,為了反映需要低數(shù)據(jù)速率反向通道的現(xiàn)有用例,我們假設(shè)單工傳輸模式也存在1:20的上游和下游數(shù)據(jù)速率之比。 圖7中的示例給出了2.1GHz帶寬下超出噪聲功率密度(藍(lán)色曲線)的發(fā)射器總可用功率的分布,輻射掩蔽相當(dāng)于上限。結(jié)果為成形發(fā)射器功率密度(紅色曲線)。當(dāng)可用功率耗盡時(shí),在較低頻率范圍內(nèi)達(dá)到-77.7dBm/Hz的最大功率密度。 現(xiàn)在,我們可以通過(guò)確定所分析頻率帶寬上的數(shù)據(jù)容量密度的積分值來(lái)計(jì)算總數(shù)據(jù)容量(示例中為2.1GHz帶寬,9.7Gbit/s)。之后可以重復(fù)此迭代算法以增加帶寬,得到數(shù)據(jù)容量與帶寬的關(guān)系曲線,如圖8所示。
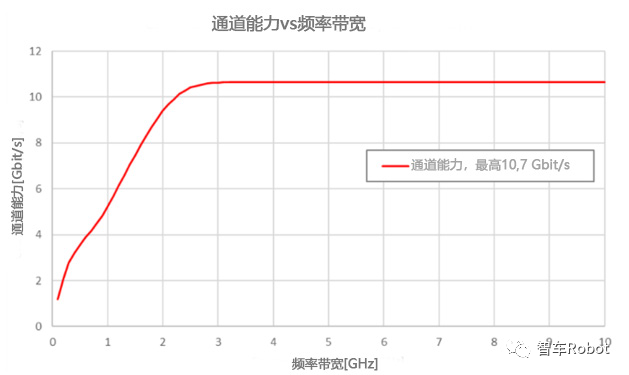
圖8 當(dāng)所示示例通道的可實(shí)現(xiàn)數(shù)據(jù)速率對(duì)應(yīng)的帶寬增加到2.7GHz,并且隨著頻率增加時(shí),容量不會(huì)再增大。主要原因是電纜的插入損耗增加,需要更高的發(fā)射器功率,而不是使用更高的頻率進(jìn)行數(shù)據(jù)傳輸。 銅介質(zhì)的最大可用頻率和可實(shí)現(xiàn)的數(shù)據(jù)速率取決于可用發(fā)射器功率,以及由電纜插入損耗以及鏈路長(zhǎng)度引起的衰減。所分析的汽車(chē)電纜具有0.14mm2的絞合線,在單工操作模式下可實(shí)現(xiàn)10Gbit/s的數(shù)據(jù)速率,最長(zhǎng)可達(dá)10m。 對(duì)于雙工操作或長(zhǎng)度增加10~15m的情況,則需要較大的橫截面積(0.22~0.35mm2)。所分析案例的最大可用頻率不超過(guò)4GHz。這需要使用更復(fù)雜的數(shù)據(jù)編碼和多級(jí)脈沖幅度調(diào)制(PAM)來(lái)實(shí)現(xiàn)PHY芯片。 如果OEM接受減小正在測(cè)試的特定應(yīng)用的通道長(zhǎng)度,則可以將數(shù)據(jù)速率提高到約20Gbit/s。這些通道還可使用兩級(jí)PAM實(shí)現(xiàn)復(fù)雜度較低的PHY芯片,數(shù)據(jù)速率為10到12Gbit/s。 從連接器的角度來(lái)看,限制參數(shù)是回波損耗。如果反射過(guò)高,則雙工操作的數(shù)據(jù)速率會(huì)顯著降低。模擬表明所使用的工作頻率帶寬內(nèi)所需的連接器回波損耗大于15到20dB,在單工操作的情況下可放寬要求。 對(duì)于上游和下游數(shù)據(jù)使用單獨(dú)鏈路的雙路應(yīng)用,這可能是一個(gè)有意義的選擇。它還允許OEM使用更簡(jiǎn)單、更實(shí)惠的PHY芯片組。在這種情況下,需要能夠針對(duì)一個(gè)通道支持多路的連接器。研究還表明,可實(shí)現(xiàn)的數(shù)據(jù)速率顯著依賴(lài)于EMI要求。因此,需要耦合衰減處于-60dB范圍或更優(yōu)范圍的完全屏蔽的電纜和連接器。通道容量分析無(wú)法體現(xiàn)STP與同軸電纜的偏好。不過(guò),它體現(xiàn)了與電纜直徑、系統(tǒng)成本和電子控制單元的EMI設(shè)計(jì)相關(guān)的因素,這些因素與汽車(chē)應(yīng)用中兩種替代方案的特定用例相對(duì)應(yīng)。圖9匯總了不同通道參數(shù)分析結(jié)果。
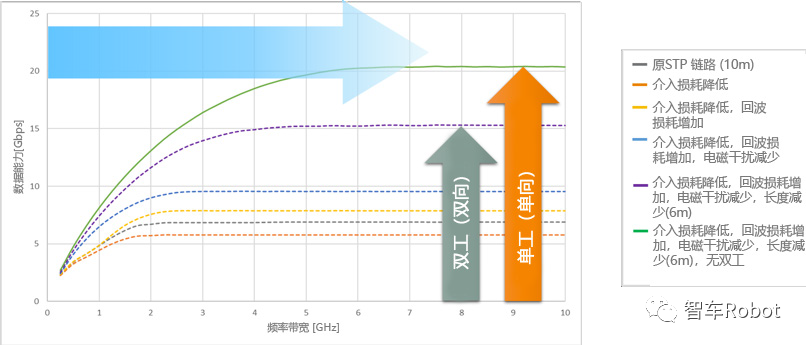
圖9
05
結(jié)論 綜上所述,可以得出結(jié)論,對(duì)于典型的汽車(chē)電纜,可用頻率帶寬保持在10GHz以下。根據(jù)電纜類(lèi)型和鏈路長(zhǎng)度,在芯片端采用適當(dāng)?shù)恼{(diào)制方案,單個(gè)通道上的數(shù)據(jù)速率可達(dá)到約20Gbit/s(參見(jiàn)圖9)。 但是很明顯,未來(lái)系統(tǒng)的性能要求會(huì)使汽車(chē)通道達(dá)到其物理限制。這意味著車(chē)載數(shù)據(jù)網(wǎng)絡(luò)架構(gòu)的設(shè)計(jì)人員需要仔細(xì)考慮適當(dāng)?shù)碾娎|類(lèi)型、鏈路長(zhǎng)度以及連接器的選擇。
-
通信
+關(guān)注
關(guān)注
18文章
6049瀏覽量
136220 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13899瀏覽量
166702
原文標(biāo)題:面向新一代汽車(chē)數(shù)據(jù)網(wǎng)絡(luò)的穩(wěn)健連接解決方案
文章出處:【微信號(hào):智能汽車(chē)電子與軟件,微信公眾號(hào):智能汽車(chē)電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
數(shù)據(jù)網(wǎng)絡(luò)分析儀的原理和應(yīng)用場(chǎng)景
信而泰網(wǎng)絡(luò)測(cè)試儀校準(zhǔn)解決方案
中科創(chuàng)達(dá)旗下Rightware發(fā)布新一代全沉浸式智能座艙解決方案
Garmin佳明和天馬推出新一代數(shù)字座艙解決方案
Garmin佳明和高通推出新一代數(shù)字座艙解決方案
5201B數(shù)據(jù)網(wǎng)絡(luò)測(cè)試儀(便攜式)

東軟發(fā)布新一代醫(yī)學(xué)影像解決方案
華為推出星脈PEN新一代全光校園網(wǎng)絡(luò)解決方案
Qorvo? 推出具有卓越能效的新一代 Matter? 解決方案
邁向新一代星地融合的高速測(cè)試解決方案
5201數(shù)據(jù)網(wǎng)絡(luò)測(cè)試儀
工業(yè)控制網(wǎng)絡(luò)和普通數(shù)據(jù)網(wǎng)絡(luò)的區(qū)別
一圖看懂華為新一代網(wǎng)絡(luò)人才培養(yǎng)解決方案

英飛凌攜手ETAS提升新一代AURIX微控制器的安全性
芯馳科技發(fā)布新一代區(qū)域控制器(ZCU)全系列協(xié)同解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論