") ADAS/AD系統(tǒng)架構(gòu)、功能及芯片平臺分析
ADAS/AD系統(tǒng)架構(gòu)、功能及芯片平臺分析
1 ADAS/AD概述
智能化是實現(xiàn)汽車作為人們第三生活空間這一目標(biāo)的重要技術(shù)路徑,當(dāng)前汽車智能化主要有兩大發(fā)展方向:駕駛自動化和座艙智能化。自動駕駛(ADAS/AD)的使命是將人的腳(縱向控制)、手(橫向控制)、眼(感知)和腦(決策)等從駕駛?cè)蝿?wù)中解放出來。人的精力被釋放出來后,進(jìn)一步促進(jìn)了人在汽車內(nèi)辦公、休閑和娛樂的需求,這些需求推動了汽車座艙的數(shù)字化、信息化以及新興的人機(jī)交互模式等技術(shù)的蓬勃發(fā)展,這也就是“智能座艙(Intelligent Cockpit)”技術(shù)。
目前自動駕駛技術(shù)在全球范圍內(nèi)已經(jīng)進(jìn)入快速發(fā)展期。隨著搭載L1/L2級別ADAS功能的汽車進(jìn)入大規(guī)模量產(chǎn),L1/L2級別ADAS功能的市場滲透率將快速提升。而L3/L4級別自動駕駛系統(tǒng)仍處于小規(guī)模原型測試階段。當(dāng)今的自動駕駛行業(yè),中國市場絕對是主力。今年中國L2的搭載量預(yù)計突破80萬,中國品牌占據(jù)絕大部分份額。
ADAS功能市場滲透率的快速提升來自幾個方面的驅(qū)動力:
1. ADAS相關(guān)的軟硬件技術(shù)越來越成熟和穩(wěn)定,成本也越來越低。比如:毫米波雷達(dá)跟五年前相比下降了超過50%。
2. 一些基本的ADAS功能(比如:自動緊急剎車AEB)被納入到了各國的汽車評測體系(比如:C-NCAP)中,這在客觀上極大的推動了這些ADAS功能的普及。
3. 中低端車競爭加劇,ADAS功能可以有效地提升品牌的科技感和駕車體驗,造成主流合資品牌和自主品牌的重點車型甚至超過了一些國際上的高端品牌。
未來中國市場ADAS功能的滲透率還將持續(xù)快速提高,中低端汽車所配置的ADAS功能將逐步增多。根據(jù)艾瑞咨詢研究報告顯示,預(yù)計2025年ADAS功能在乘用車市場可以達(dá)到65%左右的滲透率。L3級別的高速自動領(lǐng)航HWP功能和L4級別的AVP自動泊車功能,目前車型滲透率較低,未來提升空間較大。
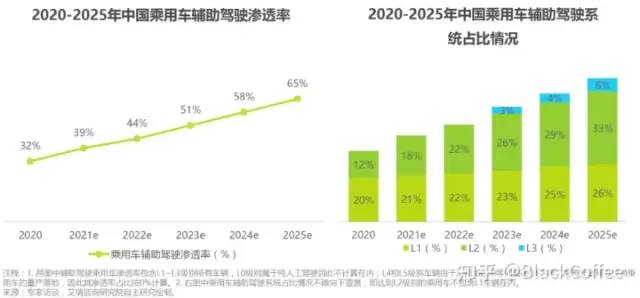
圖3-1 ADAS功能市場滲透率預(yù)測
1.1 ADAS/AD功能匯總
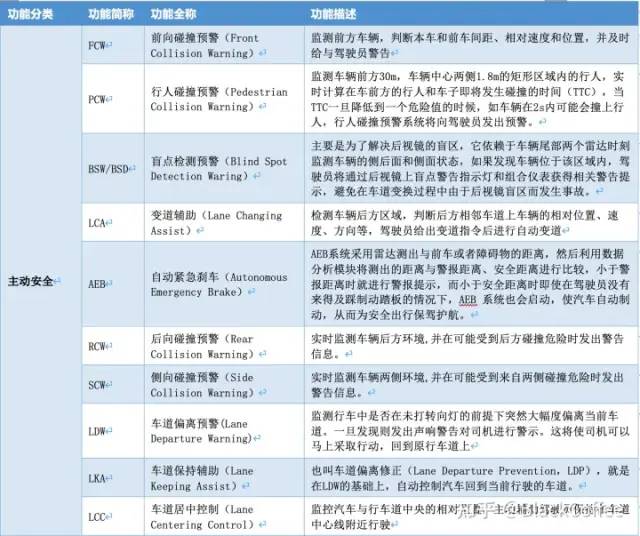
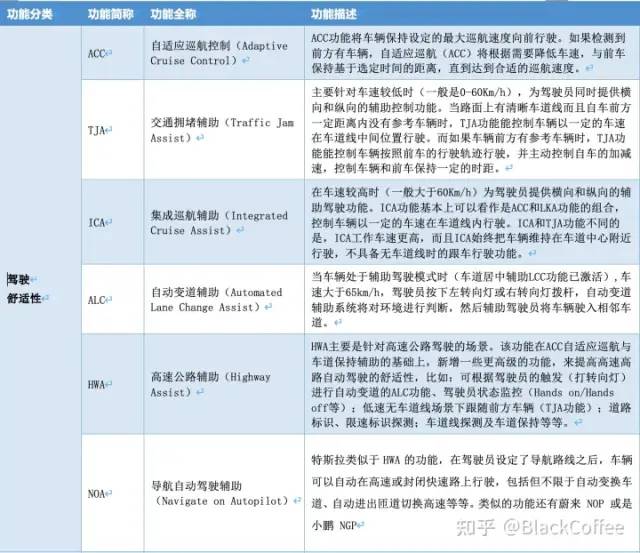
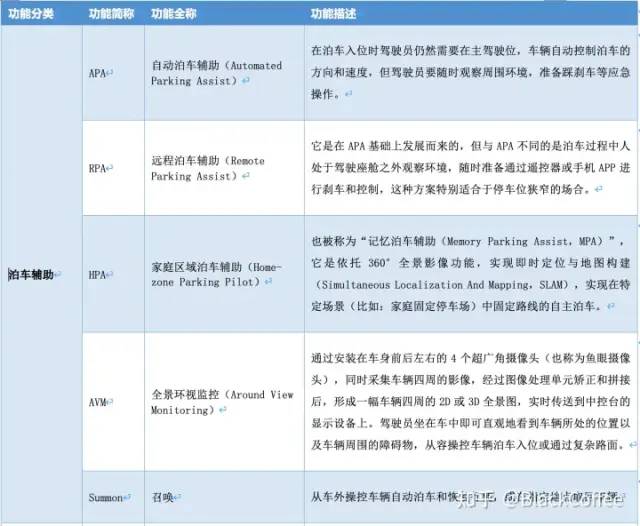
目前行業(yè)內(nèi)的ADAS系統(tǒng)實現(xiàn)了很多輔助駕駛的功能,總體上這些功能按照用途可以分為這么幾類:主動安全功能、舒適性輔助駕駛功能、泊車輔助功能和監(jiān)督/無監(jiān)督自動駕駛功能等。
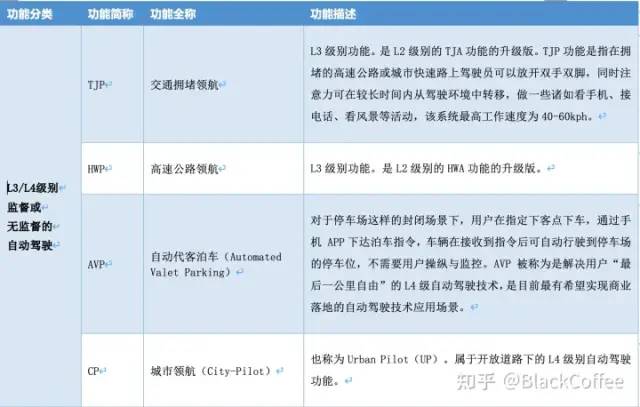
通常,L0-L2級自動駕駛,習(xí)慣用ADAS表征;L2+級自動駕駛,用ADAS/AD表征,以示過渡;L3-L4級自動駕駛,用AD表征。
1.2 ADAS/AD系統(tǒng)架構(gòu)
智能駕駛系統(tǒng)本質(zhì)上就是要解決三個問題:1)我在哪?2)我去哪?3)我該如何去?基于這樣一個系統(tǒng)模型,典型的智能駕駛系統(tǒng)或者自動駕駛系統(tǒng)通常由三部分組成:
1. 環(huán)境感知:感知系統(tǒng)依靠各種傳感器(包括:攝像頭、毫米波雷達(dá)、超聲波雷達(dá)、激光雷達(dá)、高精地圖/IMU/GPS等)來獲取汽車所處環(huán)境信息和周邊車輛、行人、交通信號燈和路標(biāo)等信息,為汽車的綜合決策提供數(shù)據(jù)支撐,解決“我在哪”的核心問題。
2. 決策規(guī)劃:通過環(huán)境感知的結(jié)果進(jìn)行數(shù)據(jù)融合,結(jié)合高精地圖數(shù)據(jù)確定合適的工作模型,決定相應(yīng)的軌跡規(guī)劃方案,以達(dá)到替代人類作出駕駛決策的目的,將智能汽車以擬人化的方式融入整個交通流當(dāng)中,解決“我去哪”的核心問題。
3. 控制執(zhí)行:也就是對一個具體的最小決策規(guī)劃結(jié)果的實際執(zhí)行,從而達(dá)到規(guī)劃的目的。具體在車上,通常體現(xiàn)為通過各種控制理論和算法來控制車輛的驅(qū)動、制動和轉(zhuǎn)向系統(tǒng),從而實現(xiàn)車輛的橫向及縱向控制,使汽車精準(zhǔn)地按照決策規(guī)劃實現(xiàn)有效的避讓、減速、車距保持、轉(zhuǎn)向等動作,解決“我該如何去”的核心問題。

圖3-2 典型自動駕駛系統(tǒng)的系統(tǒng)模型
2 ADAS/AD感知系統(tǒng)
自動駕駛的感知系統(tǒng)其實包括:環(huán)境感知、車輛自身狀態(tài)感知以及車輛定位等幾大模塊。傳感器是車輛感知系統(tǒng)收集環(huán)境信息、車輛自身狀態(tài)信息和位置信息等的重要手段。自動駕駛車輛所配備的傳感器可以分為三類:
車輛自身狀態(tài)感知傳感器(簡稱:自感知傳感器):自感知使用本體感應(yīng)傳感器來測量車輛的當(dāng)前狀態(tài),包括:車輛的速度、加速度、橫擺和轉(zhuǎn)向角等。本體感應(yīng)西西里通常使用預(yù)先安裝的測量單元來獲取信息,比如:里程表、慣性測量單元(IMU)、陀螺儀(Gyroscopes)和來自控制器局域網(wǎng)(CAN)總線的信息。
定位傳感器(Localization):定位傳感器使用GPS等外部傳感器(Exteroceptive Sensor)或慣性測量單元讀數(shù)的航位推算進(jìn)行定位,可以確定車輛的全球和本地位置。車輛高精度定位通常會基于多個傳感器信息的組合來進(jìn)行,比如:GPS、IMU、里程表和攝像頭等。對多個傳感器的數(shù)據(jù)融合可以最大限度減少單個傳感器的局限性和缺點,提高定位的精度和可靠性。
環(huán)境感知傳感器(Surrounding-sensing):環(huán)境感知傳感器主要有攝像頭、超聲波雷達(dá)、毫米波雷達(dá)和激光雷達(dá)等四種。
環(huán)境感知系統(tǒng)依靠這些環(huán)境感知傳感器來采集車輛所處環(huán)境信息數(shù)據(jù),并對其進(jìn)行一些列的計算和處理,從而對周圍環(huán)境進(jìn)行精確建模,其輸出結(jié)果是一個環(huán)境模型。所謂環(huán)境模型是指車輛外部物理世界的數(shù)字表示,它包括道路、要避開的物體(比如:其它車輛、易受傷害的道路使用者等)以及可駕駛的“自由空間(Freespace)“的表示。
不同傳感器特點各異
不同的傳感器由于其工作原理不同,因此具有不同的特性。主機(jī)廠為了保證ADAS感知系統(tǒng)的冗余和魯棒性,通常會采取多種傳感器融合的配置方案。下表總結(jié)了ADAS系統(tǒng)中常見的各類傳感器的特點:
| 傳感器類別 | 優(yōu)點 | 缺點 | 探測范圍 | 功能 |
| 攝像頭 | 對物體集合特征、表面紋理等信息進(jìn)行識別,通過算法實現(xiàn)對障礙物的探測。技術(shù)成熟、成本低 | 受光照強(qiáng)度變化影響大,容易收到惡劣天氣干擾 | 最遠(yuǎn)可超過500米 | 障礙物識別、車道線識別、輔助定位、道路信息讀取、地圖構(gòu)建等 |
| 毫米波雷達(dá) | 對煙霧、灰塵等穿透力強(qiáng),抗干擾能力較強(qiáng)、對相對速度、距離和角速度的測量準(zhǔn)確度高 | 測量范圍相對激光雷達(dá)更窄,難以識別大小和形狀 | 15-250米 | 障礙物探測 |
| 超聲波雷達(dá) | 技術(shù)成熟、成本低、受天氣干擾小,抗干擾能力強(qiáng) | 測量精度差、范圍小、距離近 | 小于10米 | 障礙物探測 |
| 激光雷達(dá) | 精度高、探測范圍較廣、克構(gòu)建測量周圍環(huán)境3D模型 | 容易收到雨雪、大霧等天氣影響,技術(shù)程度低,成本高 | 小于300米 | 障礙物探測識別、輔助定位、地圖構(gòu)建 |
| 衛(wèi)星+慣導(dǎo) | 通過對衛(wèi)星三角定位和慣性導(dǎo)航進(jìn)行結(jié)合實現(xiàn)車輛精確定位 | 容易受到城市建筑、隧道等障礙物的干擾使得車輛精度大打折扣 | 高精度定位保持窄10米內(nèi) | 車輛導(dǎo)航、定位 |
2.1 ADAS系統(tǒng)傳感器布局方案
主流的ADAS系統(tǒng)從L0級別發(fā)展到目前的L2+級別,技術(shù)方案已經(jīng)發(fā)生了巨大的變化,從早起的分布式智能傳感器方案演變到現(xiàn)在基于ADAS域控制器的ADAS域集中式方案。相應(yīng)的傳感器布局也有了很大的變化。
下面是常見的一些ADAS傳感器布局中的術(shù)語簡稱:
FCM:Front Camera Module,前視攝像頭總成,有單目(Mono)、雙目(Stereo)、雙焦(Bi-Focals)和三焦(Tri-Focals)4種形態(tài)。
FCR:Front Central Radar,前雷達(dá)模塊,有MRR (中距,Mid-Range Radar) 和 LRR (長距,Long-Range Radar) 2種形態(tài)。一般1R1V方案(后續(xù)會詳細(xì)解釋該方案)中常選擇MRR作為前雷達(dá)模塊,5R1V方案中,常選擇LRR作為前雷達(dá)。
SRRs:Side-Rear Radars,側(cè)后雷達(dá)模塊(左、右,一般左master右slave),有SRR (短距Short-Range Radar) 和MRR (中距Mid-Range Radar) 2種形態(tài);SRR常為24G毫米波,MRR常為77-79G毫米波。這里SRR縮寫就有兩個含義,可能是指側(cè)后雷達(dá)模塊,也可能是指短距離毫米波雷達(dá),因此加s區(qū)分側(cè)后雷達(dá)模塊(SRRs)。
USS:Ultra Sonic Sensor,超聲波雷達(dá)傳感器。
早期的L0-L2級別的ADAS系統(tǒng)是由幾個互相獨立的子系統(tǒng)組成的,每個子系統(tǒng)實現(xiàn)相應(yīng)獨立的ADAS功能,因此也稱為分布式的ADAS系統(tǒng)方案。
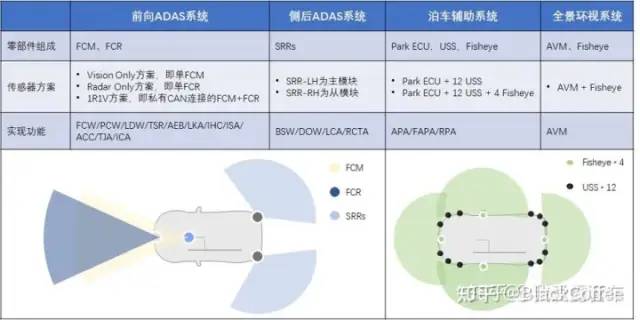
圖3-3 早期的L0-L2級別的ADAS系統(tǒng)實現(xiàn)方案
前向ADAS系統(tǒng):一般由單FCR,或者單FCM組成;當(dāng)前主流配置是FCR+FCM組成的1R1V方案,能夠支持到TJA/ICA的L2 ADAS(單車道駕駛輔助)。后續(xù)伴隨視覺檢測能力的提高,在L0-L2級ADAS/AD定位的車型上,有向單FCM發(fā)展趨勢,因為車道線等橫向控制所需感知信息,只有視覺能提供;省掉雷達(dá)能降低系統(tǒng)成本。
側(cè)后ADAS系統(tǒng)。一般由側(cè)后方兩個SRRs組成,實現(xiàn)大部分側(cè)后向ADAS功能。
自動泊車系統(tǒng)。即泊車控制器+12顆超聲波傳感器(USS)組成的APA(自動泊車輔助)系統(tǒng);實現(xiàn)功能主要是APA和FAPA等。
全景環(huán)視系統(tǒng)。即由全景環(huán)視控制器(實際現(xiàn)在該控制器目前已很少見,該零部件實體已經(jīng)被吸收合并到其他控制器節(jié)點上了;主要由車機(jī)、泊車控制器或者域控制器所取代)+ 四個魚眼攝像頭組成。實現(xiàn)AVM功能(Around View Monitoring,環(huán)視監(jiān)控)。
其中,前兩個系統(tǒng)常稱之為行車ADAS系統(tǒng)(Driving ADAS System),有時候這種行車ADAS方案也常被稱作3R1V方案,3 Radar 1 Vision方案;后兩個常稱之為泊車ADAS系統(tǒng)(Parking ADAS System)。
到L2+級別的ADAS系統(tǒng),集成度更高、性能更強(qiáng)大的ADAS域控制器整合了原來分散的ADAS子系統(tǒng),原本分散系統(tǒng)所獨占的傳感器數(shù)據(jù)可以被多個ADAS功能所復(fù)用。
L2+級別的ADAS系統(tǒng)主要有兩大類:1)多雷達(dá)域集中式方案,主要是5雷達(dá)方案,常見的有5R1V、5R2V、5R5V等方案;2)多視覺的域集中式方案,是指基于多雷達(dá)方案的繼續(xù)演進(jìn),形成多視覺感知+雷達(dá)冗余感知的系統(tǒng),比如5R12V方案。
下圖是L2+級別ADAS/AD系統(tǒng)最大化的傳感器架構(gòu)方案——5R-12V-12USS方案。這個傳感器布局架構(gòu)的上限就是“堅決不上激光雷達(dá)”。只要上了激光雷達(dá)(一般是前向激光雷達(dá)),就到了L3級AD系統(tǒng)的傳感器架構(gòu);
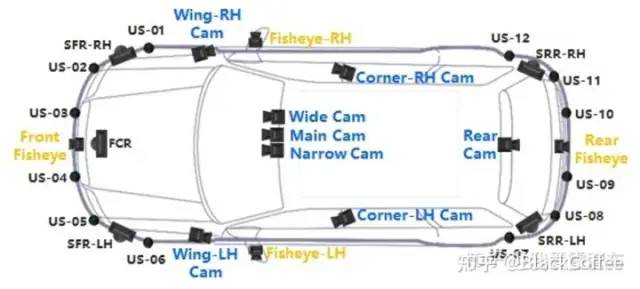
圖3-4 L2+級別ADAS系統(tǒng)的終極傳感器布局架構(gòu)
前視主攝像頭(Main Camera, x1):主攝像頭在L0-L2階段對應(yīng)FCM總成,即單目前視方案;在L2+域控方案中,作為dummy Camera,采用LVDS與域控制器連接。常見的HFOV(水平視場角,Horizontal Field Of View)主要有30° - 50° - 60° - 100° - 120°等核心設(shè)計值,一般較為圓整化。實際工程實現(xiàn)值,會根據(jù)具體光學(xué)鏡頭的不同,有48°/52°(設(shè)計值50°)、28°(設(shè)計值30°)等規(guī)格。攝像頭色彩矩陣(Patten)通常為RCCB或RCCC,有向RYYCy發(fā)展的趨勢。RYYCy沒有Clear,色彩信息未丟失,可以保證色彩還原性能。檢測距離150-170米。
前視窄角攝像頭(Narrow Camera, x1):30°左右的前視攝像頭,用來觀察紅綠燈/車輛/行人等關(guān)鍵目標(biāo)。一般與前視主攝像頭會采用相同的圖像傳感器(比如同為1.3MP,或同為2MP,甚至同為8MP的Image sensor),縮小FOV后,像素密度變大,檢測距離相對Main Camera更遠(yuǎn);Patten常為RCCB或RCCC。檢測距離250米。
前視廣角攝像頭(Wide Camera, x1):HFOV約140°,類似特斯拉的三焦視攝像頭中的廣角攝像頭。在上了8MP攝像頭后,Main Camera的FOV都能達(dá)到120°了,Wide Camera可能就不需要了。
側(cè)前(左右兩顆)攝像頭(Corner Camera, x2):HFOV約70°-80°,后續(xù)會升級到約100°;類似特斯拉的B柱攝像頭,向側(cè)前方看,主要關(guān)注近距離車輛cut-in和自車變道需求。Patten常為RCCB或RCCC。
側(cè)后(左右兩顆)攝像頭(Wing Camera,x2):HFOV約80°-90°,后續(xù)可能會統(tǒng)一到100°。Patten常為RCCB或RCCC;關(guān)注側(cè)邊和側(cè)后方目標(biāo),滿足變道需求。
后視攝像頭(Rear Camera):同前向Main Camera,用于后方目標(biāo)檢測。
以上這些攝像頭,也常稱為Driving Cameras(行車攝像頭,多用于行車功能)。
前向魚眼攝像頭(Front Fisheye Camera):魚眼環(huán)視攝像頭之一,用于全景環(huán)視功能的Display(給人看的,顯示功能,HMI),以及融合泊車功能的視覺Detection(給“車”看的,視覺感知,目標(biāo)檢測);常用色彩矩陣為RGGB,因為有色彩還原需求。若使用8MP攝像頭,并使用像素合并技術(shù)降低到2MP使用,則可以選擇RYYCy。
左側(cè)魚眼攝像頭(Left Fisheye Camera):同上。
右側(cè)魚眼攝像頭(Right Fisheye Camera):同上。
后向魚眼攝像頭(Rear Fisheye Camera):同上。
以上這四顆魚眼攝像頭,也常稱為Parking Cameras(泊車攝像頭,多用于泊車功能);當(dāng)然L2+階段各個傳感器不斷融合,目前Driving Camera和Parking Camera的界限已經(jīng)漸漸模糊了。泊車功能也常用前視攝像頭做記憶泊車(MPA,Memory Park Assist);行車功能也常用側(cè)邊魚眼攝像頭檢測車道線做safety stop。
除以上視覺傳感器,還有很多主動型傳感器:
前向毫米波雷達(dá)(Front Central Radar):一般為LRR(Long-Range Radar),負(fù)責(zé)前方目標(biāo)檢測,具備良好的測距測速性能,也不容易被遮擋;
側(cè)前角雷達(dá)(Side-Front Radar, SFR x2)和側(cè)后角雷達(dá)(Side-Rear Radar, SRR x2): 車輛四角,一般由SRR(Short-Range Radar)或MRR(Middle-Range Radar)充當(dāng)。可以提供雙模檢測模式,Long Range Mode和Short Range Mode;長距離模式FOV小,檢測距離遠(yuǎn);短距離模式FOV大,檢測距離近。在域控制器方案中,雷達(dá)不分Master和Slave。在分布式方案中,一般左側(cè)雷達(dá)為Master,右側(cè)雷達(dá)為Slave。
超聲波傳感器(Ultra Sonic Sensor, USS):12顆,側(cè)邊4個長距離,前后8個短距的。
除了上訴環(huán)境感知傳感器之外,L2+及以上ADAS/AD系統(tǒng)還需要GNSS定位、IMU(一般信號來源于安全氣囊控制器或者ESP系統(tǒng))、高精地圖等不同感知數(shù)據(jù)源。
3 ADAS/AD域控芯片及方案
(一)L0-L2級別的ADAS方案
正如前所述,早期大多數(shù)L0-L2級別的ADAS系統(tǒng)都是基于分布式控制器架構(gòu),整個ADAS系統(tǒng)由4-5個ADAS子系統(tǒng)組成,每個子系統(tǒng)通常是個一體機(jī)整體方案(可以被看作是一個smart sensor),子系統(tǒng)獨占所配置的傳感器,通常相互之間是獨立的。
以智能前視攝像頭模塊(Intelligent Front Camera Module,F(xiàn)CM)為例,整個子系統(tǒng)ECU主板上包含2顆芯片:一顆是安全核(Safety Core);另一個顆是性能核(Performance Core)。安全核一般由英飛凌TC297/397之類的MCU充當(dāng),承載控制任務(wù),因此需要較高的功能安全等級需求;性能核通常是具有更高性能算力的多核異構(gòu)MPU,會承載大量的計算任務(wù)。
下面是一個對L0-L2級別方案的總結(jié):
L0級別方案:實現(xiàn)各種ADAS報警功能,比如:FCW、LDW、BSW、LCA等。分布式架構(gòu),通常由FCM、FCR、SRRs、AVS、APA等幾大硬件模塊組成。
L1級別方案:完成各種ADAS單縱向核單橫向控制功能,比如:ACC、AEB、LKA等。也是分布式架構(gòu),硬件模塊組成與L0級別方案大致相同。
L2級別方案:完成ADAS縱向+橫向組合控制功能。比如:基于FCM+FCR融合系統(tǒng),融合前向視覺感知和前雷達(dá)目標(biāo)感知信息,實現(xiàn)TJA/ICA等功能;或者基于AVS+APA的融合系統(tǒng),實現(xiàn)自動泊車功能。
(二)L2+以上級別的ADAS方案
分布式架構(gòu)的ADAS系統(tǒng)存在兩個致命缺點:1)各個子系統(tǒng)互相獨立,無法做多傳感器之間的深度融合。2)各子系統(tǒng)獨占所配置的傳感器,因此無法實現(xiàn)跨多個不同子系統(tǒng)傳感器的復(fù)雜功能。
當(dāng)整車EE架構(gòu)演進(jìn)到域集中式EEA之后,ADAS域控制器中配置了集成度更高、算力性能更高的計算處理器平臺,進(jìn)而可以支撐更復(fù)雜的傳感器數(shù)據(jù)融合算法,以實現(xiàn)更高級級別的ADAS功能,比如:HWP、AVP等。
集中式ADAS域控制器方案從最早的四芯片方案,過渡到三芯片方案,再到當(dāng)前業(yè)界主流的兩芯片方案,如下圖3-5所示:
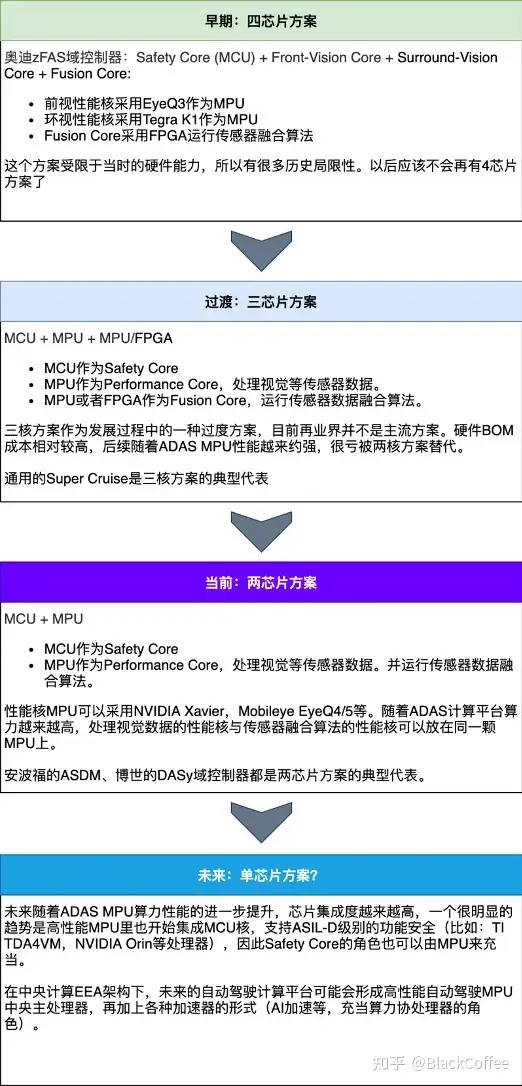
圖3-5 ADAS域控制器方案演進(jìn)歷史
下圖3-6是一個典型的車載ADAS域功能結(jié)構(gòu)示意圖,無論硬件方案如何變化,各方案所需實現(xiàn)的功能結(jié)構(gòu)都是類似的。
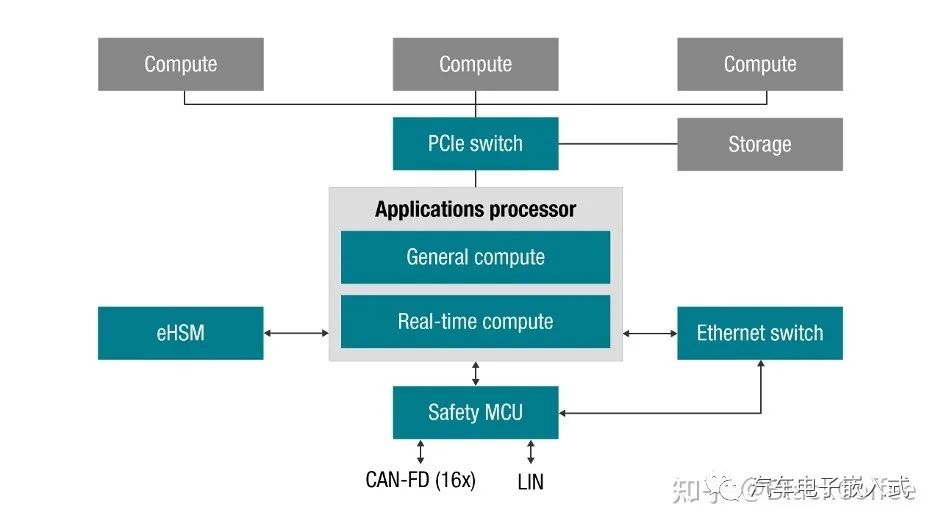
圖3-6 典型的車載ADAS域功能結(jié)構(gòu)示意圖
3.1 Mobileye EyeQ系列芯片方案
Mobileye成立于1999年,是以色列提供基于視覺算法分析和數(shù)據(jù)處理來提供ADAS/AD解決方案的全球領(lǐng)先者。其EyeQ系列芯片產(chǎn)品截止2021年底已經(jīng)總計出貨接近一億片。盡管在L3/L4領(lǐng)域被英偉達(dá)和高通壓制,但是在主流的L2級別ADAS市場,仍然是霸主,其市場占有率高達(dá)75%。2021年出貨量高達(dá)2810萬片。
Mobileye一直采用“傳感器+芯片+算法”綁定的軟硬件一體化的ADAS解決方案模式。這種“黑盒”商業(yè)模式的優(yōu)點是開發(fā)周期短,客戶可以快速出產(chǎn)品,比較受轉(zhuǎn)型較晚或者軟件/算法能力較弱的傳統(tǒng)主機(jī)廠或者Tier 1廠商歡迎。但是缺點是導(dǎo)致客戶開發(fā)靈活度下降,不能滿足客戶差異化定制產(chǎn)品的需求。越來越多的主機(jī)廠希望采用更開放的平臺,把“芯片和算法剝離開,采用可編程的芯片,從而通過OTA來實現(xiàn)持續(xù)的算法迭代升級”。這也是軟件定義汽車的思路。
下面是其EyeQ4/5/6三代產(chǎn)品的基本情況:
| 系列 | 量產(chǎn)時間 | CPU | 功耗 | 算力(INT8) | 制程工藝 | ADAS等級 | 功能安全 |
| EyeQ Ultra | 2025 | RISC-V | 176TOPS | 5nm | L4 | ||
| EyeQ6 | 2023/2024 | MIPS I6500-F | 48TOPS | 7nm | L3/L4 | ASIL-D | |
| EyeQ5 | 2020 | MIPS I6500 | 10W | 24TOPS | 7nm | L2+/L3 | ASIL-D |
| EyeQ4 | 2018 | MIPS M5150 | 3W | 2.5TOPS | 28nm | L2/L2+ |
(一)EyeQ4芯片平臺
EyeQ4新品配置了4個MIPS CPU核、6個矢量微碼處理器(VMP)以及兩個可編程宏陣列(PMA)。每個CPU核擁有4個硬件線程。總計2.5TOPS的算力,可以實現(xiàn)以每秒36幀的處理速度處理8路攝像頭的視頻信息。總體性能相比EyeQ3提升8倍之多,此外,EyeQ4還引入“路網(wǎng)采集管理(REM)”系統(tǒng),它利用縱包數(shù)據(jù)的方法將路標(biāo)、車道線等進(jìn)行壓縮,最終聚合成路書,從而為自動駕駛汽車提供更精確的定位。
下圖是EyeQ4新品的功能模塊圖。
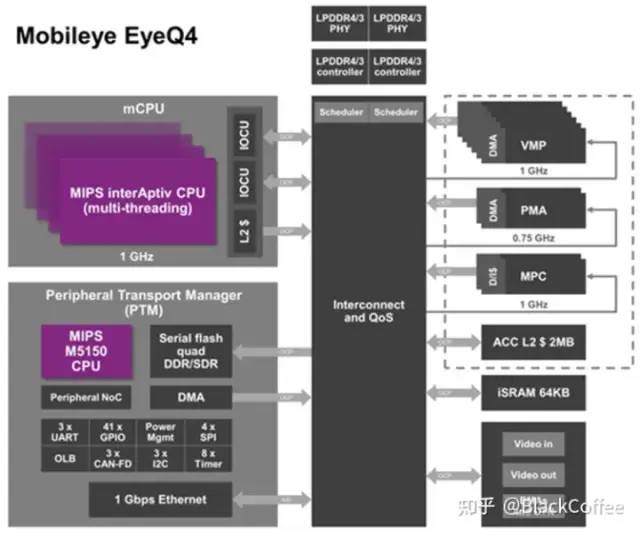
圖3-7 EyeQ4芯片功能模塊圖
(二)EyeQ5芯片平臺
EyeQ5主要有4個模塊:CPU核、計算機(jī)視覺處理器(CVP)、深度學(xué)習(xí)加速器(DLA)和多線程加速器(Multithreaded Accelerator,MA)。其中,CPU和CVP是大頭。
EyeQ5選擇了Imagination的MIPS I6500作為CPU內(nèi)核,每個MIPS I6500內(nèi)核都擁有2個硬件線程。總共配置8個CPU內(nèi)核,可提供高達(dá)52000 DMIPS算力。
EyeQ5總共配置18個CVP內(nèi)核。CVP是Mobileye針對很多傳統(tǒng)計算機(jī)視覺算法設(shè)計的新一代視覺處理器。Mobileye從公司成立時起就以自己的CV算法而聞名,也因為用專用的ASIC來運(yùn)行這些CV算法而達(dá)到極低的功耗而聞名。
EyeQ5采用了7nm的制程工藝,總計可提供高達(dá)24TOPS的算力,并且只有10W左右的TDP功耗,因此有著極為出色的能效比。EyeQ5最多支持20個外部傳感器,包括:攝像頭、雷達(dá)或者激光雷達(dá)等。出色的計算性能使得我們在EyeQ5上進(jìn)行深度的傳感器融合,以實現(xiàn)更復(fù)雜的L2+/L3級別ADAS功能。
下圖是EyeQ5的芯片功能模塊圖:
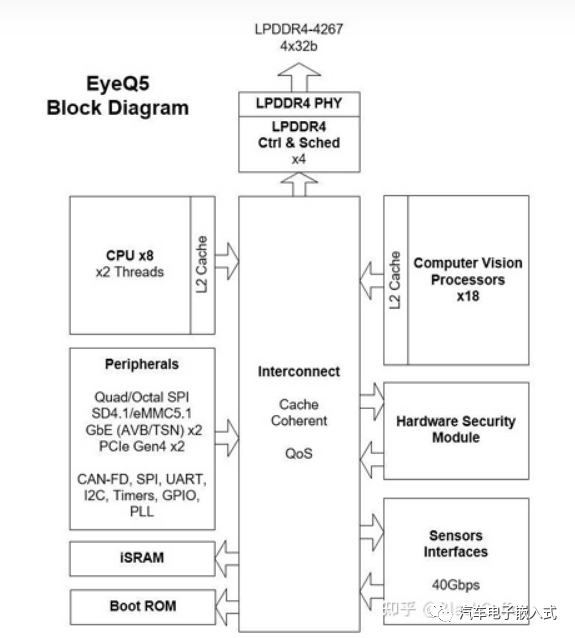
圖3-8 EyeQ5 Block Diagram
(三)EyeQ6芯片平臺
EyeQ6H與Mobileye之前的芯片最大的不同就是加入了兩個小算力規(guī)模的GPU,一個是ARM Mali GPU,算力為64GFLOPS,預(yù)計用于ADAS的AR圖像疊加輸出。另一個是Imagination的BXS 1024 MC-2,算力為1000GFLOPS,預(yù)計用于OpenCL加速引擎。
CPU仍然是EyeQ5的MIPS I6500-F架構(gòu),不同之處在每個CPU內(nèi)核的線程數(shù)從2個增加到4個,總共是8核32線程。
EyeQ6H可以用比EyeQ5多25%的功耗,提供比3倍于EyeQ5的算力性能。

圖3-9 EyeQ6 ADAS域控處理器
Mobileye芯片平臺最大優(yōu)點是產(chǎn)品成本低,開發(fā)周期很短,開發(fā)費用極低,絕大部分功能都經(jīng)過驗證,沒有風(fēng)險。而缺點是系統(tǒng)非常封閉,難以搞特色功能,迭代困難,出了問題,較難改進(jìn)或提升。對于傳統(tǒng)車廠而言,Mobileye基本是唯一選擇,對于總想與眾不同的新興造車廠家來說就有點無法適應(yīng)。然而新興造車企業(yè)畢竟還是極少數(shù)。Mobileye霸主地位至少五年內(nèi)穩(wěn)如泰山。
3.2 TI Jacinto 7芯片平臺
2020年初的CES大會上,TI發(fā)布了其最新的Jacinto 7架構(gòu)的系列車載芯片。上一代的Jacinto 6架構(gòu)主要聚焦在車載Infotainment(信息娛樂)的功能,例如更炫的UI(用戶界面)、更多的顯示屏等。隨著新一代Jacinto 7架構(gòu)芯片的發(fā)布,可以看出TI已經(jīng)基本放棄智能座艙和IVI市場,而重點轉(zhuǎn)向ADAS域控和汽車網(wǎng)關(guān)域方向。
Jacinto 7系列芯片包含兩顆車規(guī)級芯片:(1)用于高級輔助駕駛(ADAS)系統(tǒng)的TDA4VM芯片;(2)用于網(wǎng)關(guān)系統(tǒng)的DRA829V處理器。這兩款處理器都包含了用于加速數(shù)據(jù)密集型計算任務(wù)的專用加速器(如計算機(jī)視覺和深度學(xué)習(xí)等),而且它們也都集成了支持ISO26262功能安全的MCU核,使得我們可以用一顆芯片來同時承載ASIL-D高級別功能安全的控制任務(wù)和傳感器數(shù)據(jù)處理這樣的計算密集型任務(wù)。
3.2.1 TDA4VM ADAS芯片
基于Jacinto 7架構(gòu)的TDA4VM處理器專為L2+或以上級別的集中式ADAS域控制器平臺而設(shè)計的,它集成了各種加速器、深度學(xué)習(xí)處理器和片上內(nèi)存,具有強(qiáng)大的數(shù)據(jù)分析和處理能力,是一個全功能、可編程的高集成度ADAS域控處理器平臺。
這種多級處理能力使得TDA4VM能夠勝任ADAS域的各種中心處理單元角色。比如:TDA4VM處理器支持接入8MP(800萬像素)高分辨率的攝像頭,更強(qiáng)大的前視攝像頭可以幫助車輛看得更遠(yuǎn),因此可以開發(fā)出更強(qiáng)的輔助駕駛增強(qiáng)功能。用戶也可以用TDV4VM處理器同時操作4到6個300萬像素的攝像頭,并還可以將毫米波雷達(dá)、超聲波雷達(dá)和激光雷達(dá)等其它多種傳感器數(shù)據(jù)處理在一個芯片平臺上進(jìn)行深度融合(后融合)。還可以將TDA4VM處理器用作自動泊車系統(tǒng)中的中心處理器,實現(xiàn)360度的環(huán)視感知能力,從而可以開發(fā)出用戶體驗更好的360度全屏泊車系統(tǒng)。
以下框圖的左邊是當(dāng)前典型的ADAS 系統(tǒng)框圖,主要數(shù)據(jù)處理部分是由GPU或NPU完成,在這顆應(yīng)用處理器外,會集成MCU、外部ISP、以太網(wǎng)交換機(jī)和PCIe交換機(jī)等。右邊是使用TDA4VM后的ADAS系統(tǒng)框圖。TDA4把原來外部需要的上述模塊集成到芯片中,其中包含通用處理部分的CPU、實時MCU、功能安全MCU、C7x DSP、MMA深度學(xué)習(xí)加速器、VPAC DMPAC視覺加速器、內(nèi)部的ISP和以太網(wǎng)交換機(jī),以及PCIe交換機(jī)等等。顯然使用TDA4VM可以大大簡化ADAS系統(tǒng)的硬件復(fù)雜度。
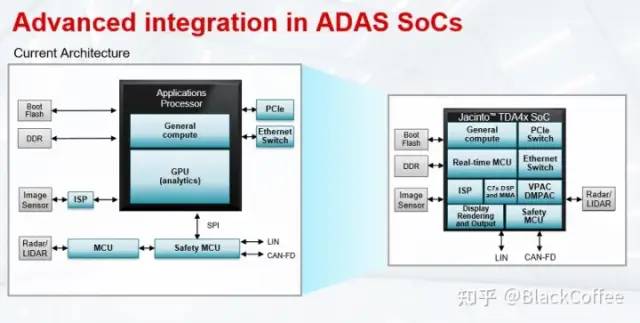
圖3-10 TDA4x域控處理器簡化ADAS系統(tǒng)架構(gòu)
下圖是TDA4VM處理器的Block Diagram。其芯片中關(guān)鍵特性如下:
具有兩個64位 Arm Cortex-A72微處理器子系統(tǒng),工作頻率高達(dá)1.8GHz,22K DMIPS;
每個Cortex-A72核集成了32KB L1 D-Cache和48KB L1 I-Cache。
每個雙核Cortex-A72 Cluster共享一個1MB大小的L2 Cache。
有六個Arm Cortex-R5F MCU,工作頻率高達(dá)1.0GHz,12 K DMIPS;
每個核存儲器為64K L2 RAM
隔離安全島中的MCU子系統(tǒng)有兩個Arm Cortex-R5F MCU
通用計算部分有四個Arm Cortex-R5F MCU
兩個C66x浮點DSP,工作頻率高達(dá)1.35 GHz, 40 GFLOPS, 160 GOPS;
C7x浮點,矢量DSP,高達(dá)1.0 GHz, 80 GFLOPS, 256 GOPS;
深度學(xué)習(xí)矩陣乘法加速器(MMA),1.0GHz高達(dá)8 TOPS (INT8);
視覺處理加速器(VPAC)和圖像信號處理器(ISP)和多個視角輔助加速器;
深度和運(yùn)動處理加速器(DMPAC);
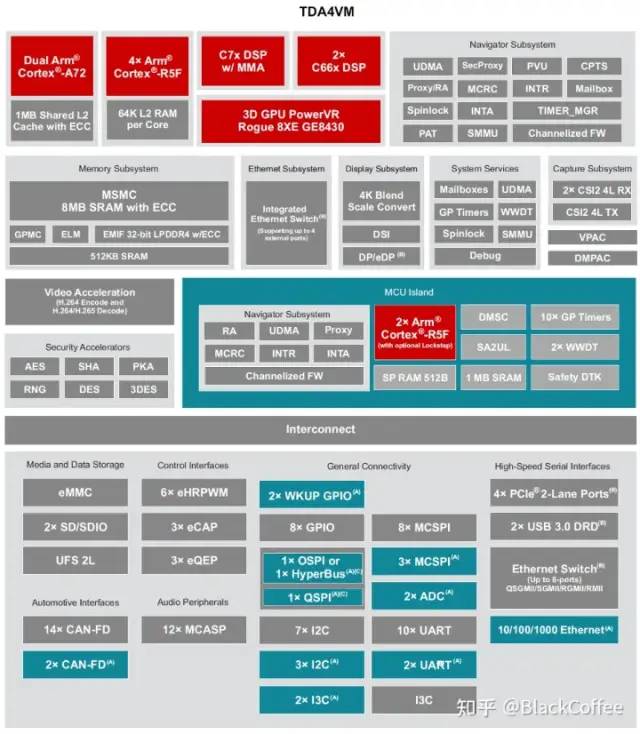
圖3-11 TI TDA4x處理器功能模塊圖
“C7x”是TI的下一代DSP,它將TI 行業(yè)領(lǐng)先的DSP 和EVE 內(nèi)核整合到單個性能更高的內(nèi)核中并增加了浮點矢量計算功能,從而實現(xiàn)了對舊代碼的向后兼容性,同時簡化了軟件編程。新型“MMA”深度學(xué)習(xí)加速器可在業(yè)界最低功率包絡(luò)內(nèi)實現(xiàn)高達(dá)8TOPS 的性能。專用的ADAS/AV 硬件加速器可提供視覺預(yù)處理以及距離和運(yùn)動處理。
TDA4VM處理器還能很好地滿足整個系統(tǒng)的功耗要求,當(dāng)勝任這些ADAS域控所需的高性能計算,TDA4VM處理器僅需5到20W的功耗,因此無需主動冷卻。比如:Momenta曾在2020年CES有一個演示,在現(xiàn)場有客戶觸摸TDA4 的芯片外殼,發(fā)現(xiàn)芯片外殼上沒有做任何的散熱,可見功耗是非常低的。
TDA4VM處理器內(nèi)的功能安全設(shè)計包括兩部分:1)隔離的功能安全島中集成了兩個支持雙核鎖步模式的Cortex-R5F核,可以實現(xiàn)ASIL-D級別的功能安全;2)其余主處理器部分可以達(dá)到ASIL-B功能安全。
隔離的功能安全島中集成了兩個支持雙核鎖步模式的Cortex-R5F核,可以實現(xiàn)ASIL-D級別的功能安全;
功能安全島中的兩個ARM Cortex-R5F核帶有浮點協(xié)處理器,支持雙核鎖步運(yùn)行模式。
512字節(jié)的Scratchpad RAM內(nèi)存
高達(dá)1MB、帶有ECC支持的片上SRAM
安全島內(nèi)專用的電壓與時鐘域(獨立于主處理器)
安全島內(nèi)專用的內(nèi)存和接口設(shè)計(獨立于主處理器)
主處理器的其余部分可以達(dá)到ASIL-B功能安全:
片上內(nèi)存和互聯(lián)都帶有ECC保護(hù)
內(nèi)置自檢機(jī)制(Built-in Self-Test,BIST)
3.2.2 DRA829V網(wǎng)關(guān)芯片
傳統(tǒng)汽車過去一直在使用低速網(wǎng)絡(luò)(比如:CAN/LIN等)進(jìn)行通信,因此如果要對整車所有電控單元進(jìn)行軟件升級將會是非常緩慢的(如下圖的左邊部分)。當(dāng)現(xiàn)代汽車演進(jìn)到域集中式EEA之后,比如常見的三域EE架構(gòu)(ADAS域、座艙域、整車控制域),域與域之間的通信就需要非常高速的通信總線(如下圖右邊),因此就需要中央網(wǎng)關(guān)跨域通信的網(wǎng)絡(luò)協(xié)議轉(zhuǎn)換和包轉(zhuǎn)發(fā)功能。DRA829V處理器就是用于這個場景。

圖3-12 DRA829V作為汽車域和域之間的通信網(wǎng)關(guān)
DRA829V處理器是業(yè)界第一款集成了片上PCIe交換機(jī)的處理器,同時,它還集成了支持8端口千兆支持TSN的以太網(wǎng)交換機(jī),進(jìn)而能夠?qū)崿F(xiàn)更快的高性能計算和整車通信。
下圖的左邊是TI理解的整個車身運(yùn)算平臺的框架,在這個框架應(yīng)用處理器外需要接上外部的PCIe交換機(jī)、以太網(wǎng)交換機(jī),也需要外部的信息安全模塊(eHSM),外部的MCU。而下圖的右邊用DRA829V處理器把上述外部需要集成的IP模塊全部集成進(jìn)來,因此大大降低了硬件復(fù)雜度,提高了可靠性。TI汽車網(wǎng)關(guān)處理器最核心的一點是高性能處理器,同時需要功耗非常低。
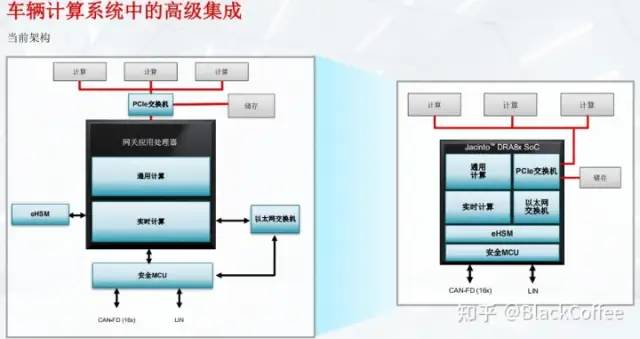
圖3-13 TI DRV8x系列網(wǎng)關(guān)芯片簡化網(wǎng)關(guān)系統(tǒng)架構(gòu)
DRA829V SoC 通過提供計算資源、在車輛計算平臺中高效移動數(shù)據(jù)以及在整個車輛網(wǎng)絡(luò)中進(jìn)行通信,解決了新型車輛計算架構(gòu)帶來的難題,可以看到DRA829V 主要是處理數(shù)據(jù)交換和安全的問題。
與NXP S32G2/S32G3相比,雖然這兩款芯片都是針對汽車中央網(wǎng)關(guān)場景,但是設(shè)計特點是不同。
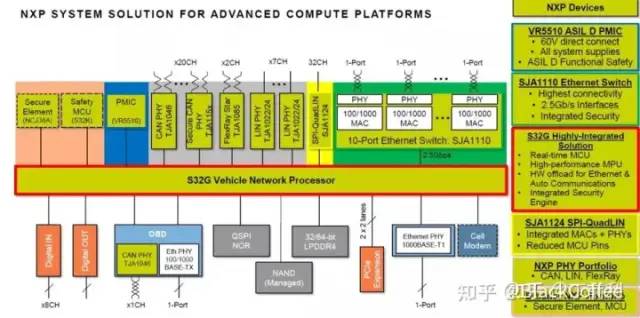
圖3-14 NXP S32G中央網(wǎng)關(guān)處理器
NXP的S32G是作為一個成熟的網(wǎng)絡(luò)處理器設(shè)計的,最大的特色是通過網(wǎng)絡(luò)卸載引擎來加速3層的協(xié)議轉(zhuǎn)換和包轉(zhuǎn)發(fā)。它完全是作為汽車域集中式EE架構(gòu)中的中央網(wǎng)關(guān)場景量身設(shè)計的,可以有效處理各控制器的OTA升級、數(shù)據(jù)網(wǎng)關(guān)的交互,安全信息的傳輸?shù)热蝿?wù)。
而DRA829V 更多是車內(nèi)高速信號的集聯(lián)和轉(zhuǎn)發(fā),這些能力使DRA829V更適合充當(dāng)域內(nèi)的高速信號的集聯(lián)和轉(zhuǎn)發(fā)節(jié)點(注意:這不同于NXP S32G的中央網(wǎng)關(guān)角色,可以認(rèn)為是域主控處理器所需要的網(wǎng)關(guān)功能)。當(dāng)然,DRA829V也可以作為中央網(wǎng)關(guān)的角色,但是因為缺乏類似于NXP S32G網(wǎng)關(guān)中包轉(zhuǎn)發(fā)引擎,因此這并不是DRA829V的主打功能。
3.3 NVIDIA Xavier/Orin的方案
英偉達(dá)是全球最大的智能計算平臺公司。公司早期專注于PC圖形計算,后來利用其適合大規(guī)模并行計算的GPU架構(gòu),逐步將業(yè)務(wù)重點拓展到云端的AI加速、HPC高性能計算、AR/VR等領(lǐng)域。除了優(yōu)秀的硬件平臺架構(gòu)和性能之外,NVIDIA在軟件和生態(tài)上也具有巨大的優(yōu)勢。基于NVIDIA GPU架構(gòu)的CUDA軟件開發(fā)平臺,是業(yè)界事實標(biāo)準(zhǔn)的異構(gòu)計算框架。NVIDIA在CUDA計算框架的基礎(chǔ)上,開發(fā)出了DNN加速庫、編譯器、開發(fā)調(diào)試工具以及TensorRT推理引擎等。
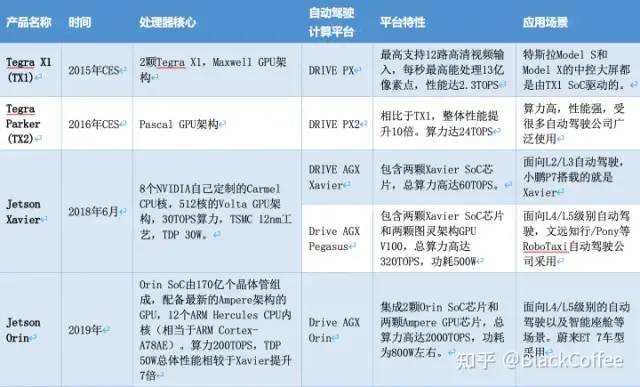
NVIDIA 2015年正式發(fā)布其面向移動端/機(jī)器人/自動駕駛等領(lǐng)域的智能處理器Tegra X1,它內(nèi)置集成了當(dāng)時NVIDIA最先進(jìn)的Maxwell架構(gòu)的GPU核。這顆SoC處理器的發(fā)布也在全球開啟了嵌入式領(lǐng)域的AI計算時代。
借助于它在云端積累的CUDA+TensorRT生態(tài)優(yōu)勢,NVIDIA在自動駕駛領(lǐng)域提供“芯片+完全自動駕駛軟件棧”端到端解決方案,包括:Drive AV軟件平臺、Drive IX軟件平臺、Drive Sim等完整的軟件生態(tài)。
3.3.1 Xavier自動駕駛計算平臺
NVIDIA在2018年CES上推出了Xavier平臺,作為Driver PX2 的進(jìn)化版本。NVIDIA稱Xavier 是“世界上最強(qiáng)大的SoC(片上系統(tǒng))”,Xavier可處理來自車輛雷達(dá)、攝像頭、激光雷達(dá)和超聲波等傳感器的自主駕駛感知數(shù)據(jù),能效比市場上同類產(chǎn)品更高,體積更小。“NVIDIA Jetson AGX Xavier 為邊緣設(shè)備的計算密度、能效和 AI 推理能力樹立了新的標(biāo)桿。”
2020年4月上市的小鵬汽車 P7,成為首款搭載 NVIDIA DRIVE AGX Xavier 自動駕駛平臺的量產(chǎn)車型,小鵬 P7 配備了13 個攝像頭、5 個毫米波雷達(dá)、12 個超聲波雷達(dá),集成開放式的 NVIDIA DRIVE OS 操作系統(tǒng)。
Xavier SoC基于臺積電12nm FinFET工藝,集成90億顆晶體管,芯片面積350平方毫米,CPU采用NVIDIA自研8核ARM64架構(gòu)(代號Carmel), 集成了Volta架構(gòu)的GPU(512個CUDA核心),支持FP32/FP16/INT8,20W功耗下單精度浮點性能1.3TFLOPS,Tensor核心性能20TOPs,解鎖到30W后可達(dá)30TOPs。
Xavier是一顆高度異構(gòu)的SoC處理器,集成多達(dá)八種不同的處理器核心或者硬件加速單元。使得它能同時、且實時地處理數(shù)十種算法,以用于傳感器處理、測距、定位和繪圖、視覺和感知以及路徑規(guī)劃等任務(wù)負(fù)載。
八核CPU:八核 “Carmel” CPU 基于ARMv8 ISA
深度學(xué)習(xí)加速器(DLA):5 TOPS (FP16) | 10 TOPS (INT8)
Volta GPU:512 CUDA cores | 20 TOPS (INT8) | 1.3 TFLOPS (FP32)
視覺處理器:1.6 TOPS
立體聲和光流引擎(SOFE):6 TOPS
圖像信號處理器(ISP):1.5 Giga Pixels/s
視頻編碼器:1.2 GPix/s
視頻解碼器:1.8 GPix/s
Xavier的主處理器可以達(dá)到ASIL-B級別的功能安全等級需求。
下面是Xavier SoC的Block Diagram:
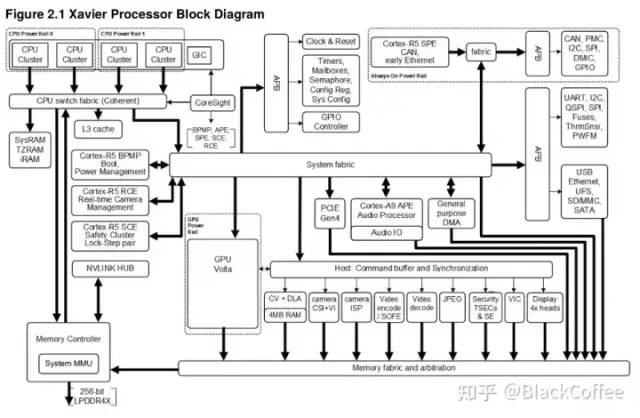
圖3-15 NVIDIA Xavier處理器功能模塊圖
除了強(qiáng)大的計算資源外,Xavier SoC擁有豐富的IO接口資源:
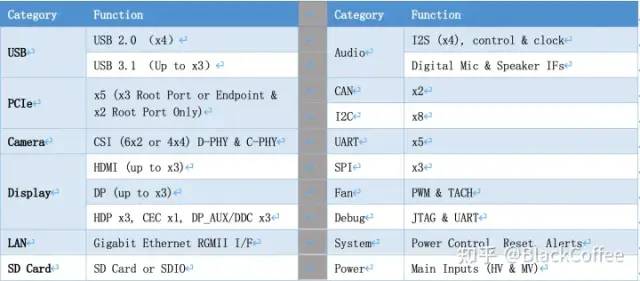
Xavier有兩個版本的片上系統(tǒng)(System On Module),分別是Jetson AGX Xavier 8GB和Jetson AGX Xavier:
Jetson AGX Xavier 8GB:是一款價格實惠的低功耗版的Jetson AGX Xavier,在軟硬件上與現(xiàn)有的 Jetson AGX Xavier 完全兼容。其整個模塊最高消耗 20W 功率,同時提供高達(dá) 20 TOPS 的 AI 性能。
Jetson AGX Xavier:作為世界上第一個專為自主機(jī)器人設(shè)計的智能計算平臺,Jetson AGX Xavier可以提供很高的計算性能,同時保持較低的功耗。Jetson AGX Xavier平臺可以預(yù)設(shè)10W、15W和30W三種運(yùn)行模式,Jetson AGX Xavier Industrial(工業(yè)版)則提供兩種可選的功耗模式:20W和40W。
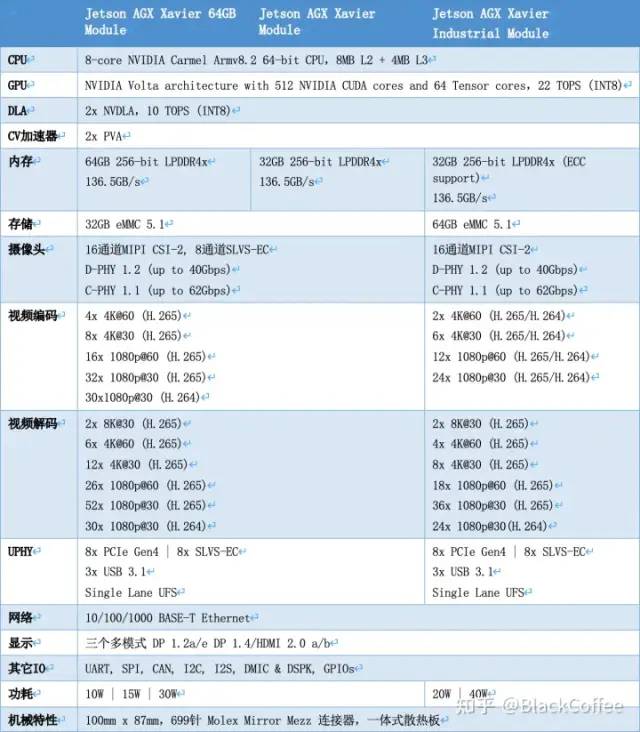
下面是各不同版本的Jetson AGX Xavier片上系統(tǒng)的性能參數(shù)對比:
基于Xavier的ADAS DCU方案
Ecotron(ecotron.ai/)是美國一家專注于ADAS DCU(ADCU)的制造商。它于2019年9月發(fā)布了EAXVA03型ADAS域控制器,這是一款采用NVIDIA Xavier SoC和Infineon TC297 MCU打造、面向L3/L4級別自動駕駛領(lǐng)域的高性能中央計算平臺。按照設(shè)計方案考慮,Xavier智能處理器用于環(huán)境感知、圖像融合、路徑規(guī)劃等,TC297 MCU用于滿足ISO26262功能安全需求(ASIL-C/D級別)的控制應(yīng)用場景(也即作為Safety Core),比如安全監(jiān)控、冗余控制、網(wǎng)關(guān)通訊及整車控制。
目前最新的型號已經(jīng)發(fā)展到EAXVA04和EAXVA05。EAXVA04是EAXVA03的升級版,還是一顆Xavier+一顆TC297的方案,而EAXVA05則采用了兩顆Xavier+TC297的方案,因而可以提供更大的算力。下面是EAXVA04 ADAS域控制器的結(jié)構(gòu)圖:
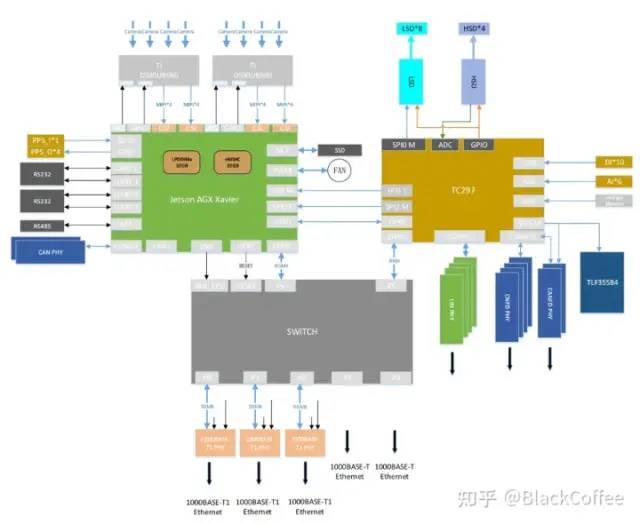
圖3-16 EAXVA04的方案結(jié)構(gòu)圖
下面是EAXVA05 ADAS域控制器雙Xavier+TC297 MCU的方案結(jié)構(gòu)圖:
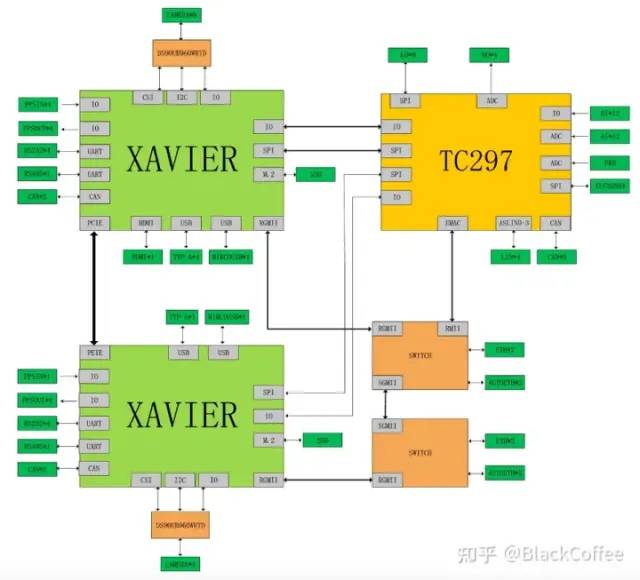
圖3-17 EAXVA05 ADAS域控制器結(jié)構(gòu)圖
3.3.2 Orin自動駕駛計算平臺
2019年12月英偉達(dá)發(fā)布了新一代面向自動駕駛和機(jī)器人領(lǐng)域Orin芯片和計算平臺。具有ARM Hercules CPU內(nèi)核和英偉達(dá)下一代GPU架構(gòu)。Orin SoC包含170億晶體管,晶體管的數(shù)量幾乎是Xavier SoC的兩倍,具有12個ARM Hercules內(nèi)核,將集成Nvidia下一代Ampere架構(gòu)的GPU,提供200 TOPS@INT8性能,接近Xavier SoC的7倍,Orin SOC將在2021年提供樣片,2022年正式面向車廠量產(chǎn)。
2020年5月GTC上,英偉達(dá)介紹了即將發(fā)布的新一代自動駕駛Drive AGX Orin平臺,它可以搭載兩個Orin SoC和兩塊NVIDIA Ampere GPU,可以實現(xiàn)從入門級ADAS解決方案到L5級自動駕駛出租車(Robotaxi)系統(tǒng)的全方位性能提升,平臺最高可提供2000TOPS算力。未來L4/L5級別的自動駕駛系統(tǒng)將需要更復(fù)雜、更強(qiáng)大的自動駕駛軟件框架和算法,借助強(qiáng)勁的計算性能,Orin計算平臺將有助于并發(fā)運(yùn)行多個自動駕駛應(yīng)用和深度神經(jīng)網(wǎng)絡(luò)模型算法。
作為一顆專為自動駕駛而設(shè)計的車載智能計算平臺,Orin可以達(dá)到ISO 26262 ASIL-D 等級的功能安全標(biāo)準(zhǔn)。
借助于先進(jìn)的7nm制程工藝,Orin擁有非常出色的功耗水平。在擁有200TOPS的巨大算力時,TDP僅為50W。
下圖是Orin SoC的Block Diagram:
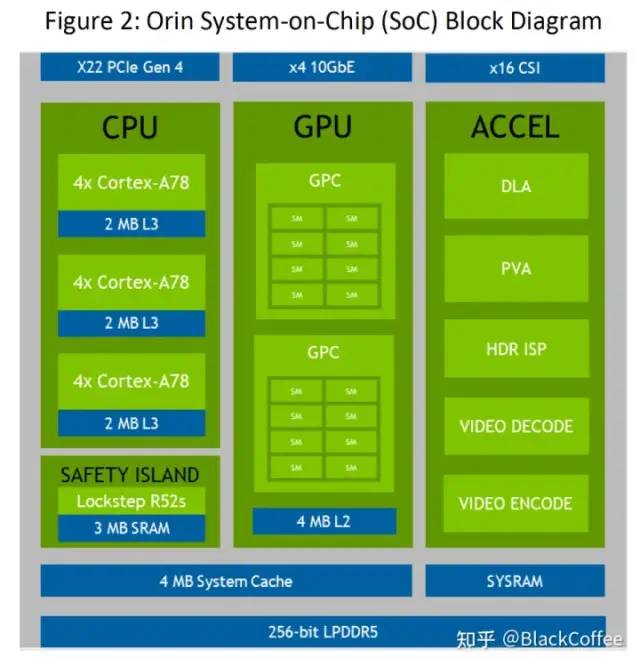
圖3-18 NVIDIA Orin處理器功能模塊圖
下表是Jetson AGX Orin的片上系統(tǒng)的性能參數(shù):

3.4 高通Snapdragon Ride自動駕駛平臺
2020年12月30日,長城汽車召開智能駕駛戰(zhàn)略升級發(fā)布會,正式發(fā)布全新的咖啡智駕“331戰(zhàn)略”。會上,長城還與高通達(dá)成戰(zhàn)略合作關(guān)系,決定在量產(chǎn)車上搭載高通Snapdragon Ride自動駕駛平臺。長城汽車計劃在2022年推出全球首個基于高通Snapdragon Ride平臺的L4級量產(chǎn)車。搭載IBEO的4D全半導(dǎo)體真固態(tài)激光雷達(dá),也就是Flash激光雷達(dá),最遠(yuǎn)有效距離可達(dá)300米。
高通Snapdragon Ride自動駕駛平臺在硬件方面由兩塊芯片構(gòu)成:1)SA8540主處理器(作為ADAS域應(yīng)用主處理器,滿足系統(tǒng)級安全需求);2)SA9000B加速器,提供自動駕駛系統(tǒng)所需的算力。全部達(dá)到ASIL-D,可支持L1~L5級別的自動駕駛。單板的AI算力是360TOPS(INT8),整體功耗65瓦,計算能效比約為5.5TOPS/W,通過PCIe交換機(jī)可以增加到4套計算平臺,四加速器的AI算力總計達(dá)1440TOPS。
ADAS應(yīng)用處理器:Kryo CPU、Adreno GPU、神經(jīng)處理器、嵌入式視覺處理器
自動駕駛專用加速器(ASIC):神經(jīng)網(wǎng)絡(luò)處理器陣列
L1/L2級ADAS:面向具備AEB、TSR和LKA等駕駛輔助功能的汽車。硬件支持:1個ADAS應(yīng)用處理器,可提供30 TOPS的算力
L2+級ADAS:面向具備HWA(高速輔助)、自動泊車APA以及TJA(低速輔助)功能的汽車。所需硬件支持:2個或多個ADAS應(yīng)用處理器,期望所需算力要求60~125 TOPS的算力
L4/L5級自動駕駛:面向在城市交通環(huán)境中的自動駕駛乘用車、機(jī)器人出租車和機(jī)器人物流車;所需硬件支持:2個ADAS應(yīng)用處理器 + 2個自動駕駛加速器(ASIC),可提供700TOPS算力,功耗為130W
到目前為止,高通還未公開其SA8540P和SA9000B兩款芯片的信息,高通單獨為L3/L4自動駕駛開發(fā)全新芯片的可能性極小,所以我們可以根據(jù)高通的其它相關(guān)芯片產(chǎn)品來大致推測一下。高通在2021年上半年正式商業(yè)化一款A(yù)I 100邊緣計算套件,采用驍龍865做應(yīng)用處理器,AI 100做加速器,在M.2 edge接口下,算力為70TOPS,在PCIe接口16核心下,算力可達(dá)400TOPS。
根據(jù)長城的宣傳圖片,8540和9000都是7納米,AI 100和驍龍865也是7納米,PCIe也在長城的宣傳圖片上可以看到。當(dāng)然為了車規(guī),必須犧牲一點性能,通過降頻來降低功耗,達(dá)到車規(guī),因此性能降到了360TOPS。驍龍865是高通7納米芯片中最頂級的,870的頻率更高,最高達(dá)3.2GHz,功耗勢必更高,因此8540最有可能是驍龍865的車規(guī)版芯片,當(dāng)然X55的Modem可以去掉。高通只有一款加速器,SA9000B很可能就是AI 100的車規(guī)版。

圖3-19 高通Cloud A100 AI加速處理器
高通AI 100的核心走的是DSP路線,單芯片最多有16個AI核心。每個AI核的SRAM是9MB,16個就是144MB,特斯拉FSD是64MB,基本上AI 100是特斯拉的兩倍。高通套件用的是12GB的LPDDR5,特斯拉FSD只能對應(yīng)LPDDR4。
高通當(dāng)然不會只提供硬件,而是會提供全套軟硬件解決方案,包括軟件SDK、工具和仿真等。
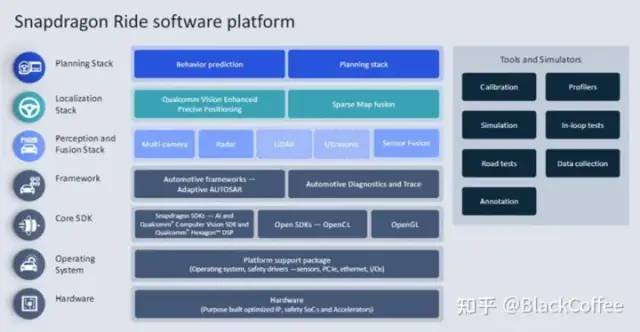
圖3-20 高通Snapdragon Ride自動駕駛軟件棧架構(gòu)
高通自動駕駛平臺的合作伙伴,重點是其視覺感知和駕駛策略軟件棧Arriver。實際Arriver就是Veoneer的軟件品牌,泊車方面主要是法雷奧,Park4u是法雷奧泊車系統(tǒng)的名稱。DMS方面主要合作伙伴是Seeing Machines,即凱迪拉克DMS供應(yīng)商。
總體來看,高通的策略是自己提供端到端的完整軟硬件解決方案,并同時積極布局上下游相應(yīng)的生態(tài)合作伙伴。
4 ADAS/AD芯片的關(guān)鍵指標(biāo)
作為整個汽車的大腦,自動駕駛域控制器通常要連接多個攝像頭、毫米波雷達(dá)、激光雷達(dá)以及IMU等傳感器設(shè)備,并對來自這些傳感器的大量數(shù)據(jù)進(jìn)行處理和計算。尤其是攝像頭和激光雷達(dá)所產(chǎn)生的數(shù)據(jù)量非常大,因此需要配置一個核心運(yùn)算性能越來越強(qiáng)勁的自動駕駛主處理器。
下面我們總結(jié)一下自動駕駛主處理器所應(yīng)具有的關(guān)鍵指標(biāo):
(一)CPU核心
在汽車電子領(lǐng)域,通常以DMIPS(Dhrystone MIPS)來測量CPU核心的整數(shù)計算能力。
Dhrystone標(biāo)準(zhǔn)的測試方法很簡單,就是單位時間內(nèi)跑了多少次Dhrystone程序,其指標(biāo)單位為DMIPS/MHz。MIPS是Million Instructions Per Second的縮寫,每秒處理的百萬級的機(jī)器語言指令數(shù)。DMIPS中的D是Dhrystone的縮寫,它表示了在Dhrystone標(biāo)準(zhǔn)的測試方法下的MIPS。
除了Dhrystone Benchmark之外,CoreMark是另一套在嵌入式領(lǐng)域常見的CPU核心性能的測試基準(zhǔn)。CoreMark是由嵌入式微處理器基準(zhǔn)評測協(xié)會EEMBC的Shay Gla-On于2009年提出的一項基準(zhǔn)測試程序,其主要目標(biāo)是測試處理器核心性能,這個標(biāo)準(zhǔn)被認(rèn)為比陳舊的Dhrystone標(biāo)準(zhǔn)更有實際價值。
(二)Memory帶寬
自動駕駛芯片平臺因為要接入大量的傳感器數(shù)據(jù),因此內(nèi)存的壓力非常大。整個系統(tǒng)往往呈現(xiàn)出Memory-Bound系統(tǒng)的特點,因此內(nèi)存帶寬通常決定了系統(tǒng)性能的理論上限。
比如常見的256-bit LPDDR4@4266,其帶寬為:(256 * 4266)/ (8 * 1000)= 136.5GB/s。256-bit LPDDR5@6400的帶寬為:(256 * 6400) / (8 * 1000) = 204.8 GB/s。
(三)AI算力
自動駕駛系統(tǒng)因為要處理各種各樣的傳感器數(shù)據(jù),因此對算力需求很大。其中當(dāng)屬對來自攝像頭的視覺圖像數(shù)據(jù)的處理最為消耗算力。
自動駕駛級別每升高一個級,其所需算力至少增加數(shù)倍。比如:L2級別需要10+ TOPS的算力,L3需要100 TOPS左右的算力,L4級別可能需要500 TOPS左右的算力,L5級別甚至需要1000+ TOPS以上的算力。
除了理論硬件算力之外,實際的算力利用率也至關(guān)重要。不同AI加速器的架構(gòu)設(shè)計通常會導(dǎo)致不同的硬件算力實際利用率,因而相同的神經(jīng)網(wǎng)絡(luò)模型在兩款具有相同硬件理論算力的AI加速器上跑出不同的實測性能。
(四)能效比
能效比是算力與TDP功耗之比,也即每瓦功耗所能貢獻(xiàn)的理論算力值,這是衡量AI加速器設(shè)計好壞的一個非常重要指標(biāo)。比如:NIVIDA Orin芯片的算力為200TOPS,TDP是50W,其能效比約為4TOPS/W。
(五)車規(guī)與功能安全
與消費電子產(chǎn)品相比,汽車芯片在安全性和可靠性上有這個最高的要求。
汽車芯片長年工作在“-40℃到125℃”高低溫以及劇烈震動的惡劣環(huán)境下,為了保證汽車電子產(chǎn)品達(dá)到對工作溫度、可靠性與產(chǎn)品壽命的高標(biāo)準(zhǔn)質(zhì)量要求,國際汽車電子協(xié)會(Automotive Electronics Council,AEC)建立了相關(guān)的質(zhì)量認(rèn)證標(biāo)準(zhǔn),其中AEC-Q100是針對于車載集成電路壓力測試的認(rèn)證標(biāo)準(zhǔn)。AEC-Q100標(biāo)準(zhǔn)經(jīng)過多年發(fā)展,已經(jīng)成為汽車電子產(chǎn)品在可靠性和產(chǎn)品壽命等方面的工業(yè)事實標(biāo)準(zhǔn)。
除了滿足車規(guī)級要求之外,自動駕駛芯片也需要滿足由ISO 26262標(biāo)準(zhǔn)定義的“功能安全(Function Safety,簡稱Fusa)”的認(rèn)證要求。功能安全對芯片上的設(shè)計要求是要盡可能找出并糾正芯片的失效(分為:系統(tǒng)失效和隨機(jī)失效)。系統(tǒng)失效本質(zhì)上是產(chǎn)品設(shè)計上的缺陷,因此主要依靠設(shè)計和實現(xiàn)的流程規(guī)范來保證,而隨機(jī)失效則更多依賴于芯片設(shè)計上的特殊失效探測機(jī)制來保證。
ISO 26262對安全等級做了劃分,常見的是ASIL-B和ASIL-D級別。ASIL-B要求芯片能覆蓋90%的單點失效場景,而ASIL-D則要求能達(dá)到99%。芯片面積越大,晶體管越多,相應(yīng)的失效率越高。
(六)視覺接口與處理能力
攝像頭接入目前通常采用MIPI-CSI2接口標(biāo)準(zhǔn)。MIPI CSI(Camera Serial Interface)是由MIPI聯(lián)盟下 Camera 工作組指定的接口標(biāo)準(zhǔn)。CSI-2 是 MIPI CSI 第二版,主要由應(yīng)用層、協(xié)議層、物理層組成,最大支持4通道數(shù)據(jù)傳輸、單線傳輸速度高達(dá)1Gb/s。同時接入的攝像頭路數(shù)是自動駕駛芯片的一個重要指標(biāo)。比如:NVIDIA的Xavier/Orin都允許同時接入16路攝像頭。
ISP作為視覺成像處理的核心芯片,也是非常重要的。自動駕駛芯片通常內(nèi)置集成的ISP模塊。通過MIPI-CSI-2接口所連接的攝像頭Sensor,先把Raw圖像數(shù)據(jù)送給ISP進(jìn)行處理,ISP處理過后的RGB/YUV圖像數(shù)據(jù)再送給其它模塊,比如:CODEC或CV加速器等。為了得到更好的圖像效果,自動駕駛汽車上對ISP的要求非常高。
此外,跟視覺處理相關(guān)的重要特性還包括:圖像繪制加速GPU,顯示輸出接口以及視頻編解碼等。
(七)豐富的IO接口資源
自動駕駛的主控處理器需要豐富的接口來連接各種各樣的傳感器設(shè)備。目前業(yè)界常見的自動駕駛傳感器主要有:攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)、組合導(dǎo)航、IMU以及V2X模塊等。
對攝像頭的接口類型主要有:MIPI CSI-2、LVDS、FPD Link等。
激光雷達(dá)一般是通過普通的Ethernet接口來連接。
毫米波雷達(dá)都是通過CAN總線來傳輸數(shù)據(jù)
超聲波雷達(dá)基本都是通過LIN總線
組合導(dǎo)航與慣導(dǎo)IMU常見接口是RS232
V2X模塊一般也是采用Ethernet接口來傳輸數(shù)據(jù)
除了上述傳感器所需IO接口外,常見的其它高速接口與低速接口也都是需要的,比如:PCIe、USB、I2C、SPI、RS232等等。
審核編輯:郭婷
-
adas
+關(guān)注
關(guān)注
309文章
2185瀏覽量
208697 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13845瀏覽量
166575 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1047瀏覽量
64411
原文標(biāo)題:深度分析汽車芯片的現(xiàn)狀與發(fā)展(三)ADAS/AD域控制器及芯片平臺分析
文章出處:【微信號:汽車電子嵌入式,微信公眾號:汽車電子嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于risc-v架構(gòu)的芯片與linux系統(tǒng)兼容性討論
智能網(wǎng)聯(lián)汽車云控系統(tǒng)第1部分:系統(tǒng)組成及基礎(chǔ)平臺架構(gòu)
康謀分享 | AD/ADAS的性能概覽:在AD/ADAS的開發(fā)與驗證中“大海撈針”!

IIOT云平臺是什么?有什么功能?
康謀分享 | 直面AD/ADAS快速開發(fā)挑戰(zhàn):IVEX自動駕駛場景管理及分析平臺!

智慧水利物聯(lián)網(wǎng)平臺的功能及應(yīng)用場景
能耗監(jiān)測管理平臺的功能和應(yīng)用場景
詳解工業(yè)網(wǎng)關(guān)在線探測功能及用途

交換芯片架構(gòu)設(shè)計
fpga芯片架構(gòu)介紹
中心能源管控平臺架構(gòu)與功能





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論