 【合宙Air105開發板試用體驗】+視角控制云臺的實現
【合宙Air105開發板試用體驗】+視角控制云臺的實現
本文來源電子發燒友社區,作者:李唐, 帖子地址:https://bbs.elecfans.com/jishu_2290781_1_1.html
當初為Air105 核心板所吸引的是它的攝像功能,就打算為它添加一個可控制攝像頭轉動的云臺,以獲取更大視角的觀察范圍。
在實施過程中,針對USB接口安裝2種驅程,以適應2種工作模式的使用。
這2種模式中,一種是用于程序下載與調試,另一種則是用于攝像頭的傳遞數據。
要進行程序下載與調試,需安裝CH340的驅動,見圖1所示。在完成驅動安裝后,將撥碼開關撥到ON的位置并連接USB,就可見到圖2所示的虛擬串口。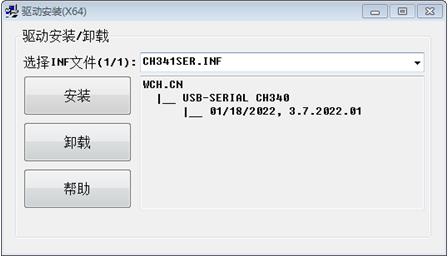
圖1 安裝CH340驅動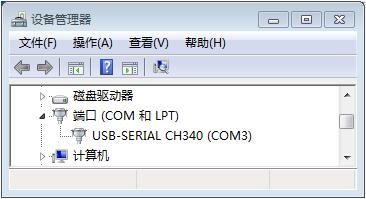
圖2 下載與調試串口
對于攝像頭串口,需使用Luatools_v2安裝usbcamera_1.0.0_LuatOS-SoC_V0006_AIR105.soc,將圖3所示。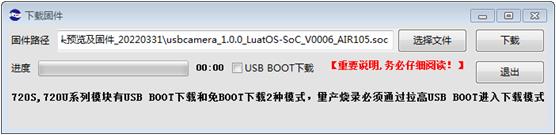
圖3 安裝固件
然后再安裝攝像頭驅動,它與“合宙Cat.1模塊PC 端 ”的USB驅動相同,其安裝界面如圖4所示。
圖4 安裝攝像頭驅動
完成安裝后,將撥碼開關撥離ON的位置,然后重新連接USB,則可見到圖5所示的攝像頭串口。
圖5 攝像頭串口
為了在電腦上查看拍攝的內容,需在電腦上安裝攝像頭預覽軟件。在完成安裝后,打開該軟件,即可見到圖6所示的拍攝效果。
圖6拍攝效果
以此為基礎,再為攝像頭添加一個步進電機作為云臺,就可達到設計的目標。
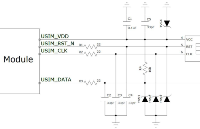
由于步進電機的工作電流較大,故需要由驅動模塊來拖動電機,該驅動模塊的核心芯片為ULN2003。使用的電機為4相5線制減速步進電機,其電路構成如圖7所示。
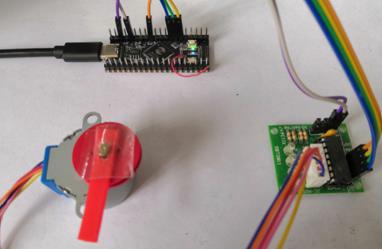
圖7電路構成
該步進電機的型號為28BYJ-48,它共有5條引線。其中VCC接電機的中心抽頭線(為紅色),其它4條線接電機的A、B、C、D相。該電機的直徑為28mm,電壓:5V,步進角度:5.625 x 1/64,減速比:1/64。
步進電機與開發板的連接關系為:
IN 4 ---橙---A--- PB4
IN 3 ---黃---B--- PB5
IN 2 ---粉---C--- PB2
IN1 ---藍---D--- PB3
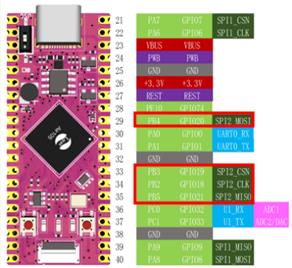
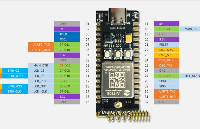
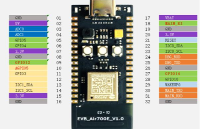
圖8 使用引腳
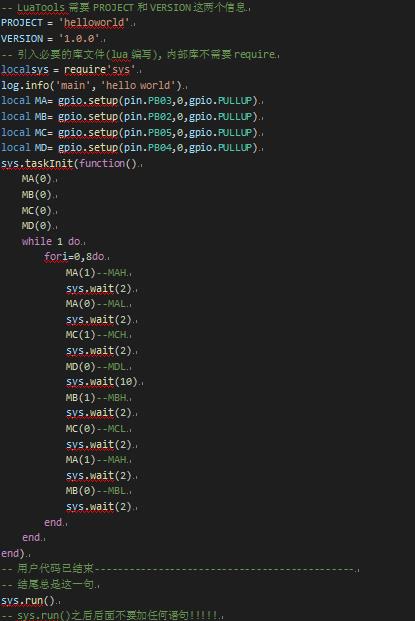
實現電機逆時針旋轉的程序為:
經運行和調試,電機電機開始轉動,見圖9所示。
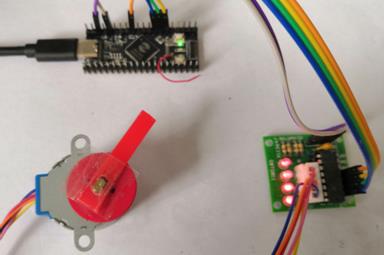
圖9 電機控制
若電機順時針旋轉,則程序為:
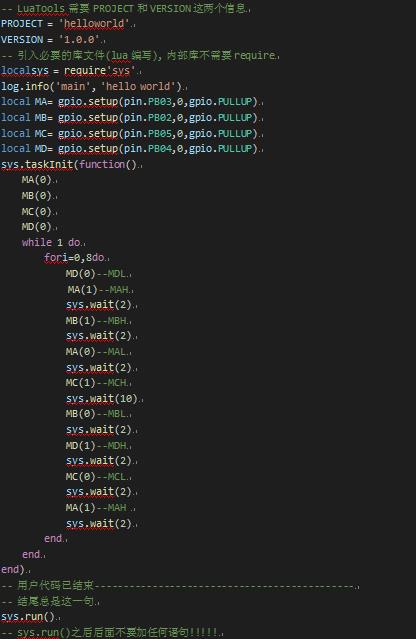
當然,若調整電機的快慢,則可通過調整延時函數sys.wait()來解決。
此外,為了便于控制云臺的旋轉,可配置正反轉及停止按鍵來輔助調節。
Air105是一款體型小巧的開發板,但又是一款功能強大的開發板,盡管因為首次使用上手比較慢了點,可還是很值得花時間去研究的,在此再次對活動的組織者和產品贊助者表示感謝!
演示視頻:
電機(開發板體驗視頻,詳見作者原文鏈接)
-
合宙通信
+關注
關注
0文章
147瀏覽量
1760 -
Air105
+關注
關注
0文章
48瀏覽量
305
發布評論請先 登錄
相關推薦
RNDIS網卡應用看這篇!合宙Air780EP低功耗4G模組AT開發示例

FTP應用看這篇!合宙Air780EP低功耗4G模組AT開發示例
合宙Air201資產定位模組LuatOS課程(六):PWRKEY控制解決關機難問題

合宙低功耗4G模組AIR780EX ——開發板使用說明

合宙LuatOS開發板Core_Air780EP使用說明


合宙Air780EP模塊——AT指令MQTT接入OneNET開發指南






 工商網監
工商網監
評論