") 自動(dòng)駕駛系統(tǒng)中的Planning and Controlling模塊介紹
自動(dòng)駕駛系統(tǒng)中的Planning and Controlling模塊介紹
普遍來說,在自動(dòng)駕駛系統(tǒng)的整個(gè)鏈條中,感知子系統(tǒng)的曝光度通常會(huì)比其他子系統(tǒng)更高一些。這里的原因很多,比如Tesla主動(dòng)挑起的純視覺傳感器路線之爭,再比如日進(jìn)千里的激光雷達(dá)上車工程進(jìn)度,再比如AI在計(jì)算機(jī)視覺領(lǐng)域取得的一個(gè)又一個(gè)偉大的技術(shù)進(jìn)展,再比如技術(shù)表達(dá)能力超強(qiáng)的Andrew Karpathy的個(gè)人魅力……相比較之下,自動(dòng)駕駛系統(tǒng)中的規(guī)劃和控制子系統(tǒng)——Planning and Controlling模塊則相對(duì)默默無聞。小編想,這里面很多原因,不一而足。
從規(guī)劃系統(tǒng)Planning來說,傳統(tǒng)的機(jī)器人領(lǐng)域中成熟的路徑搜索方案并不適用于真正的乘用車(高速高安全)自動(dòng)駕駛領(lǐng)域。不論從安全性還是實(shí)時(shí)性來看,距離可廣泛推廣的商用系統(tǒng)性能還差距遙遠(yuǎn)。尤其在感知系統(tǒng)的整體水平邁向新臺(tái)階的當(dāng)前階段,規(guī)劃和控制系統(tǒng)如果還是停留在傳統(tǒng)機(jī)器人系統(tǒng)的技術(shù)水準(zhǔn),端到端的整體上就略顯失調(diào)了。
從另一個(gè)角度看,AI到底以何種方式可以解決當(dāng)前主要的自動(dòng)駕駛規(guī)劃問題,從而達(dá)到類似于感知系統(tǒng)那個(gè)級(jí)別的AI化,還沒有技術(shù)定論或者一個(gè)普遍被接受的技術(shù)方案:比如Waymo的ChauffeurNet采用BehaviorCloning模仿學(xué)習(xí),起點(diǎn)上就有其先天的不足,能否克服長尾問題而實(shí)現(xiàn)批量部署還有待觀察;再比如強(qiáng)化學(xué)習(xí)Reinforcement Learning雖然在技術(shù)原理上先天適合部署在自動(dòng)駕駛場(chǎng)景,但具體是個(gè)什么模式還有不小的爭議。
配套的仿真系統(tǒng)是否足夠好地模擬現(xiàn)實(shí),高價(jià)值的訓(xùn)練數(shù)據(jù)如何獲取,這都是阻撓RL在自動(dòng)駕駛領(lǐng)域落地的主要絆腳石。相對(duì)規(guī)劃系統(tǒng)來說,倒是單純的控制系統(tǒng)所面臨的問題較少。默默無聞主要是因?yàn)檐囕v動(dòng)力學(xué)發(fā)展歷史悠久,人類已經(jīng)積累了對(duì)于車輛實(shí)體進(jìn)行控制的足夠理論和經(jīng)驗(yàn)。
故從本期開始,在這個(gè)大的主題下我們將不定期地介紹和討論各個(gè)主流玩家在規(guī)劃和控制系統(tǒng)上的技術(shù)現(xiàn)狀和進(jìn)展,力圖將我們的視線從感知系統(tǒng)擴(kuò)展到規(guī)控系統(tǒng)。這種從頭至尾的端到端地技術(shù)觀察,會(huì)給我們帶來更豐富的知識(shí)體驗(yàn)和更全面的系統(tǒng)級(jí)理解。
當(dāng)然,在本系列中我們會(huì)依然保留車右智能在公眾號(hào)文章中的一貫準(zhǔn)則:內(nèi)容上不會(huì)大段堆砌論文而太過沉重,但技術(shù)實(shí)現(xiàn)思路上必須清晰和連貫。希望讀者能跟得上和跟得緊,有問題請(qǐng)?jiān)诤笈_(tái)和小編暢所欲言。
想想還是從Tesla開始吧!后續(xù)我們根據(jù)讀者的反饋和熱度,再?zèng)Q定涉及哪些其它主流的自動(dòng)駕駛廠家。
Tesla在規(guī)控模塊上的線索
2021年Tesla AI Day上Karpathy的演講受到很多追捧,尤其Transformer第一次被介紹用于BEV視覺矢量場(chǎng)信息的復(fù)現(xiàn)。自那之后的相關(guān)復(fù)盤和分析文章簡直汗牛充棟了。但相對(duì)來說,Ashok主持的Planning and Controlling部分受到的關(guān)注就少多了(小編:有句剛句,Ashok一個(gè)是表達(dá)能力有限,另一個(gè)是印度英語確實(shí)太難懂了)。我們寫了這么多關(guān)于Tesla的技術(shù)分析文章,也基本沒有涉及過Planning & Controlling部分,算是一直以來的一塊空白拼圖了。
歷史上,我們也幾乎沒有看到過Tesla主動(dòng)站出來介紹自己在Planning and Controlling上的技術(shù)進(jìn)展,只是有一些不嚴(yán)肅的只言片語,一帶而過而已。但其實(shí)我們每個(gè)人都明白,P&C規(guī)控部分的重要性不言而喻。所以今天我們就從Tesla主持這一塊研發(fā)的Ashok入手,開始今天的話題……
Ashok是誰?
按照Elon Musk的公開說法,Ashok Elluswamy是Tesla開始籌備Autopilot團(tuán)隊(duì)以來所招募的第一位員工,可謂資深(小編:Elon Musk在一次播客的直播采訪中,特意糾正訪問人的問題,強(qiáng)調(diào)說Ashok的貢獻(xiàn)并不比Karpathy小)。在AI Day的自我介紹上,Ashok說他是“1 Planning and controlling team、2 Auto-labeling team以及3 Simulation platform(Dojo)的技術(shù)負(fù)責(zé)人。”這應(yīng)該是基本涵蓋了除Karpathy的identification team和Milan的Hardware team以外,Tesla自動(dòng)駕駛部門全部的技術(shù)力量了。
從技術(shù)角度看,因?yàn)榉浅>o密的技術(shù)耦合關(guān)系,這幾塊技術(shù)細(xì)分板塊也確實(shí)適合歸到一個(gè)部門來統(tǒng)一領(lǐng)導(dǎo)。讀者可以這么理解Ashok的工作范圍:通過auto labeling將合格的視覺數(shù)據(jù)(特征數(shù)據(jù))完成有效標(biāo)注之后,可以用于Planning(含預(yù)測(cè))和Controlling模塊的能力訓(xùn)練和建立。
在能力建立之中和建立完畢之后,利用simulation平臺(tái)可以提供測(cè)試和驗(yàn)收。這個(gè)過程屬于我們?cè)跉v史文章中多次強(qiáng)調(diào)過的Tesla的Data Engine循環(huán)中的一部分,Tesla正是通過這個(gè)完備的Data Engine循環(huán),來同時(shí)鑄造Autopilot的感知和規(guī)控模塊能力的。
因?yàn)锳shok的個(gè)人曝光度很低,在2021年度的AI Day之后,Elon Musk特意通過微博回答了一些讀者對(duì)印度小哥Ashok技術(shù)背景信息的提問。如上圖2的推文中寫道:“Tesla Autopilot技術(shù)核心負(fù)責(zé)人分別是Ashok、Andrej Karpathy和Milan(小編:Ashok的資歷和貢獻(xiàn)其實(shí)還排在Karpathy之前),他們歸屬部門之間的協(xié)調(diào)關(guān)系更類似于一種圓桌騎士般的平等和協(xié)作結(jié)構(gòu)。”
自動(dòng)駕駛的核心任務(wù)
注:從本章節(jié)開始的后續(xù)章節(jié),專業(yè)術(shù)語較多,但串起這些專業(yè)術(shù)語的技術(shù)思路并不算復(fù)雜,需要讀者耐心辨識(shí)和記憶每一個(gè)術(shù)語,以便更好理解。
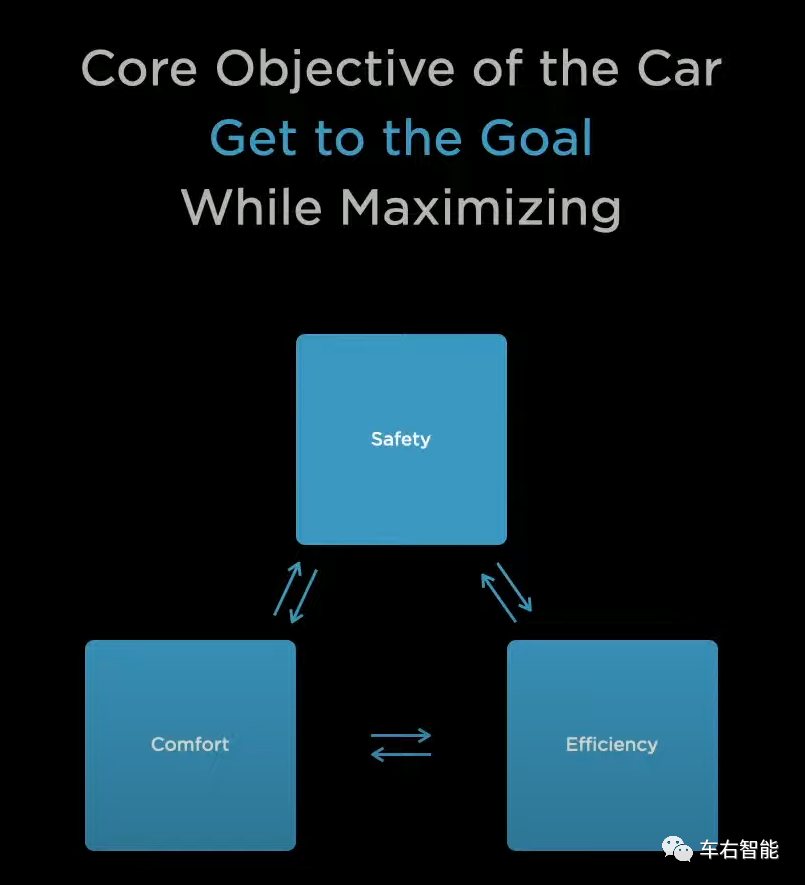
自動(dòng)駕駛系統(tǒng)的核心任務(wù)就是實(shí)現(xiàn)車輛自動(dòng)抵達(dá)預(yù)定目標(biāo),同時(shí)需要滿足同時(shí)最大化以下三個(gè)目標(biāo):
圖三【control and planning-4.png】來自Tesla 2021 AI Day演講視頻截圖,取自URL:https://www.youtube.com/watch?v=j0z4FweCy4M&t=4380s;
可能有些老生常談,但未必每個(gè)讀者都能真正意識(shí)到以上三目標(biāo)之間的真正關(guān)聯(lián)。安全性Safety——舒適性Comfort——效能Efficiency,三者之間兩兩相關(guān)緊密耦合,但同時(shí)達(dá)到三者各自的最大值是不現(xiàn)實(shí)的,例如:當(dāng)在無法預(yù)測(cè)的突發(fā)狀態(tài)下,車輛會(huì)犧牲行車效能Efficiency和駕乘舒適性Comfort,而采取高能耗、且劇烈的規(guī)避動(dòng)作。在確保乘客人身安全的前提下,會(huì)同時(shí)犧牲乘客舒適體驗(yàn)和車輛的行駛效率。相仿地,從舒適性和效能出發(fā),我們也可以得到類似極端場(chǎng)景的結(jié)論。因此最大化自動(dòng)駕駛?cè)貎r(jià)值的核心,是需要系統(tǒng)在保障行車安全性的前提下,在三者之間尋求妥協(xié)和折中之后的整體價(jià)值最大化。
商業(yè)版本的Autopilot在目前技術(shù)狀態(tài)下可實(shí)現(xiàn)標(biāo)準(zhǔn)的Level-2自動(dòng)駕駛功能,依賴導(dǎo)航系統(tǒng)的Route Path Planning輸出結(jié)果,甚至可以在結(jié)構(gòu)化良好的高速公路場(chǎng)景上,相對(duì)于L2更進(jìn)一步實(shí)現(xiàn)相當(dāng)自動(dòng)化的道路行駛、自動(dòng)化變道和出入高速公路的上下匝道口。
已經(jīng)較好地在封閉道路環(huán)境下,統(tǒng)一了Safety——Comfort——Efficiency三者之間的關(guān)系。但對(duì)于更普及和關(guān)鍵的City road社區(qū)道路場(chǎng)景下,自動(dòng)駕駛的規(guī)劃和控制模塊能力,還有相當(dāng)?shù)那啡薄_@里尤其突出的核心問題就是,對(duì)于Planning規(guī)劃模塊來說,其所面臨的道路行駛場(chǎng)景的復(fù)雜程度是大大地增加了。
Tesla如何處理規(guī)劃Planning中的關(guān)鍵問題
對(duì)于自動(dòng)駕駛系統(tǒng)的核心能力——Planning規(guī)劃功能模塊,其本質(zhì)是要在復(fù)雜的、高時(shí)變性的外部環(huán)境下,尋找出“自車ego”——自動(dòng)駕駛車輛的可行駛軌跡,且具備(小編:應(yīng)該是絕對(duì)的必備!)上一章節(jié)中我們提到的安全性(實(shí)時(shí)性)、舒適性和高效能(合理性)。Tesla認(rèn)為這種軌跡規(guī)劃能力和對(duì)應(yīng)的車輛控制能力,可以等效理解為一種需要實(shí)時(shí)解決的映射問題:即從反應(yīng)外部世界真實(shí)狀態(tài)的狀態(tài)空間S,到?jīng)Q定自車軌跡的動(dòng)作空間A之間的映射能力。這種能力可以保證自車ego系統(tǒng)對(duì)于外部瞬息萬變的道路環(huán)境及時(shí)響應(yīng),尋找出最佳的運(yùn)動(dòng)軌跡——Trajectory,從而形成對(duì)于車輛控制的明確輸入。
注:我們?cè)谖闹锌赡軙?huì)多次使用路徑——Path、軌跡——Trajectory的概念,基本上我們認(rèn)為它們是等效的,都是區(qū)別于長距導(dǎo)航路徑——Navigation Route的實(shí)時(shí)概念。車輛控制系統(tǒng)將會(huì)根據(jù)規(guī)劃模塊的Path or Trajectory輸出,形成具體的方向、油門和剎車指令,來完成對(duì)于車輛的控制。
Ashok在AI Day上談及Trajectory Planning功能的問題時(shí)談到,從外部環(huán)境的狀態(tài)空間S到車輛運(yùn)動(dòng)的動(dòng)作空間A的映射,涉及的問題主要是:第一,動(dòng)作空間的輸出往往是個(gè)非凸問題-Non-Convex,即存在多個(gè)可行的解(小編:在我們的問題里對(duì)應(yīng)可行的軌跡選擇可能不止一條),因此在數(shù)學(xué)上,你很難確定哪個(gè)“最小解”才是全局最優(yōu)的最佳軌跡選擇;第二,動(dòng)作空間的輸出軌跡,在時(shí)間尺度和控制參數(shù)尺度上看,都具備比較沉重的多維輸出性質(zhì)。具體講,需要覆蓋長達(dá)10-15秒內(nèi),軌跡上的每一個(gè)軌跡點(diǎn)的位置、速度、加速度和加加速度(Jerk)參數(shù)的求解。毫無疑問這是一個(gè)需要實(shí)時(shí)計(jì)算、和高頻率迭代更新的密集計(jì)算工作量。
因此,一個(gè)合理的、混合型的Planning規(guī)劃解決方案,在Ashok看來,是必須的。
圖四【control and planning-5.png】來自Tesla 2021 AI Day演講視頻截圖和后期加工,取自URL:https://www.youtube.com/watch?v=j0z4FweCy4M&t=4380s;
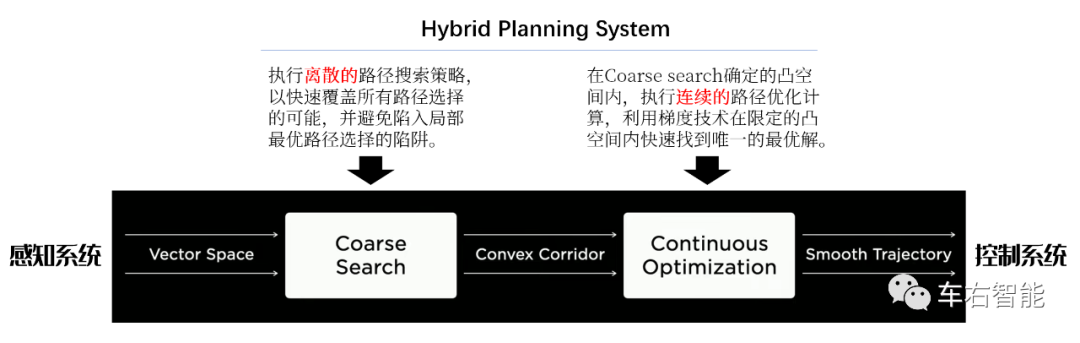
上圖4繪制出從左側(cè)感知系統(tǒng)輸出,到最右側(cè)車輛控制系統(tǒng)輸入之間的規(guī)劃Planning流程。它是一個(gè)在結(jié)構(gòu)上分步驟、功能上混合搭配的規(guī)劃流程。
Coarse Search階段,負(fù)責(zé)將感知系統(tǒng)提供的環(huán)境矢量空間數(shù)據(jù),從一個(gè)非凸問題轉(zhuǎn)換為凸問題(小編:讀者可以將凸問題理解為界定一個(gè)有唯一最優(yōu)解存在的問題邊界)。所采用的具體的離散化搜索方案,可以確保規(guī)劃系統(tǒng)在大范圍內(nèi)快速將問題簡化為凸問題,構(gòu)造出所謂的Convex Corridor;后續(xù)的Continuous Optimization階段中,則采取完全相反的連續(xù)路徑優(yōu)化計(jì)算(對(duì)應(yīng)于階段一中的離散方法),利用成熟的梯度Gradient方法,在Convex Corridor內(nèi)快速計(jì)算出最優(yōu)的行駛軌跡,并最終交付給車輛控制系統(tǒng)。(小編:從現(xiàn)有市場(chǎng)資料看,我們似乎還不能確定規(guī)控模塊的輸出是軌跡點(diǎn),還是直接的油門、剎車和方向控制數(shù)據(jù),真正的端到端系統(tǒng)應(yīng)該是直接的控制數(shù)據(jù)輸出,而非中間狀態(tài)的Trajectory軌跡點(diǎn)數(shù)據(jù)。)
基本上,在階段一,通過離散方法保障快速覆蓋整體路徑搜索空間;在階段二,通過連續(xù)優(yōu)化方法以低計(jì)算成本尋找最優(yōu)路徑。這是一個(gè)很合理的前后呼應(yīng),互相彌補(bǔ)的Hybrid混合路徑規(guī)劃方案,成功地規(guī)避了離散方法和連續(xù)方法各自的不足。Ashok隨后舉例一個(gè)比較常規(guī)的實(shí)際規(guī)劃場(chǎng)景——自主換道左轉(zhuǎn),來證實(shí)這個(gè)Hybrid Planning方案的可行性和性能優(yōu)勢(shì)。
換道左轉(zhuǎn)場(chǎng)景下Hybrid Planning的表現(xiàn)
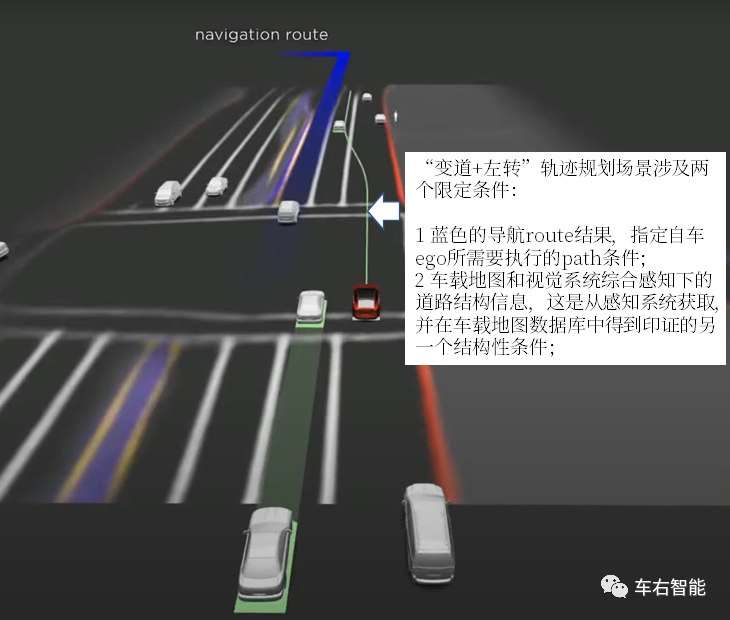
以下圖5中顯示了一個(gè)高度結(jié)構(gòu)化的換道+左轉(zhuǎn)場(chǎng)景。構(gòu)成這個(gè)結(jié)構(gòu)化場(chǎng)景的兩個(gè)要素,一個(gè)是導(dǎo)航結(jié)果輸出,藍(lán)色寬線條顯示。它在地理大尺度上表征自動(dòng)駕駛車輛的未來路徑/Path,哪個(gè)路口直行通過,哪個(gè)路口需要執(zhí)行轉(zhuǎn)彎操作,都在Path級(jí)別上有完整定義;另一個(gè)是道路結(jié)構(gòu)化信息的確立,車道數(shù)、車道左右轉(zhuǎn)屬性、車道最高限速、車道在路口和紅綠燈的對(duì)應(yīng)關(guān)系……等等。
這些信息一部分來自于車載地圖(小編:對(duì)于Tesla的Autopilot來說,這并非屬于嚴(yán)格意義上的HDmap),另一部分來自于主車的視覺識(shí)別系統(tǒng),這一部分的優(yōu)先級(jí)和確定語義權(quán)重往往更高,即當(dāng)視覺識(shí)別系統(tǒng)輸出和車載地圖不符合時(shí),以視覺識(shí)別系統(tǒng)輸出為準(zhǔn)。
圖五【control and planning-6.png】來自Tesla 2021 AI Day演講視頻截圖和后期加工,取自URL:https://www.youtube.com/watch?v=j0z4FweCy4M&t=4380s;
Tesla的Hybrid Planning規(guī)劃方案需要解決圖5中的場(chǎng)景,在滿足安全性——舒適性——效能綜合最大化的前提下,完成換道和左轉(zhuǎn)操作。嚴(yán)格講,這是一個(gè)不“顯式/explicit”考慮道路其他參與目標(biāo)(小編:比如左右側(cè)車道的其它車輛)狀態(tài)的、過于理想的Path planning能力展示。
參考下圖我們做進(jìn)一步解釋:
圖六【control and planning-7.png】來自Tesla 2021 AI Day演講視頻截圖和后期加工,取自URL:https://www.youtube.com/watch?v=j0z4FweCy4M&t=4380s;
圖6中的主車ego一旦獲取導(dǎo)航模塊的route輸出,和當(dāng)前行駛路段的道路結(jié)構(gòu)信息之后,即可以發(fā)起Path planning規(guī)劃工作。回想圖4當(dāng)中的Hybrid planning混合規(guī)劃方式的第一步——從Vector(和導(dǎo)航Route輸出)中獲取信息,然后在Coarse Search階段中執(zhí)行離散化的路徑搜索策略,以快速覆蓋所有路徑選擇的可能,并避免陷入局部最優(yōu)路徑選擇的陷阱。
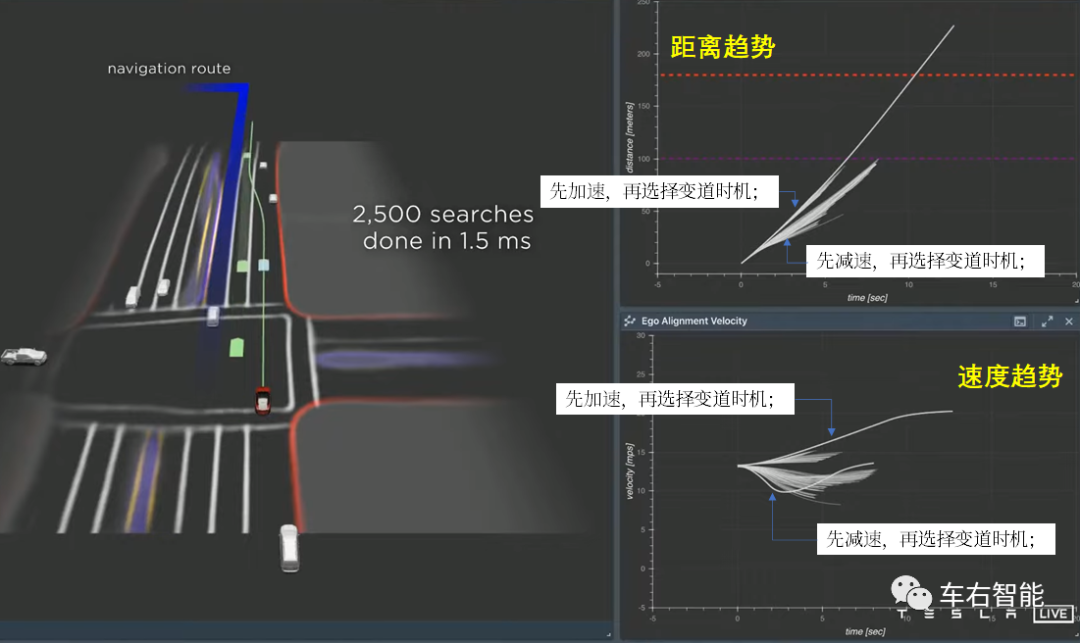
這種快速離散化路徑搜索的起點(diǎn)和終點(diǎn)定義邏輯非常簡單,可以參見上圖6中右側(cè)在距離(自車ego距離路口的實(shí)際距離)和速度(自車ego的運(yùn)行速度)變化趨勢(shì):即自車ego先踩剎車再尋機(jī)變道、還是自車ego先加速再選擇變道時(shí)機(jī)。
在兩種極限操作所塑造的車輛運(yùn)動(dòng)軌跡空間以內(nèi)(小編:上圖6中的兩個(gè)扇形區(qū)域內(nèi)),自動(dòng)駕駛系統(tǒng)需要最終根據(jù)安全——效能——舒適度三要素綜合最大化的原則,來最終確定選取哪一條路徑最合時(shí)宜。讀到這里讀者還是需要關(guān)注的兩個(gè)小重點(diǎn):
1 離散化的路徑生成和搜索方法并不復(fù)雜,在當(dāng)前的計(jì)算硬件上可以實(shí)現(xiàn)非常高的計(jì)算效率。如果以這個(gè)換道+左轉(zhuǎn)場(chǎng)景為例,它可以在1.5ms內(nèi)生成2500條可行的可選路徑;
2 這僅僅是Hybrid planning規(guī)劃算法的第一步,只是在較大的地理尺度上挑選并確定了候選路徑,或者說是一條Convex Corridor(小編:克服了非凸問題的凸走廊),這個(gè)路徑在后續(xù)并非一成不變,而只是一個(gè)基準(zhǔn)的參考路徑。為后續(xù)的Continuous Optimization連續(xù)優(yōu)化埋下伏筆。
這里一定會(huì)有讀者提問,這種Planning規(guī)劃的階段輸出,只考慮固定的道路結(jié)構(gòu)和導(dǎo)航輸出Route所產(chǎn)生的恒定的操作空間(比如左轉(zhuǎn)右轉(zhuǎn)直行),而沒有考慮道路上其它資源使用者的動(dòng)態(tài)信息,這是否可行?其實(shí)這就是Ashok沒有表達(dá)出來的含義,這種Planning規(guī)劃模塊的工作模式都是迭代的,迭代周期非常短(小編:可能在ms或者百ms級(jí)別),它在每一個(gè)規(guī)劃任務(wù)要求的時(shí)間間隔上都會(huì)重新進(jìn)行路徑規(guī)劃Coarse Search計(jì)算,并產(chǎn)生輸出。
理想如高速公路直行行駛時(shí),這種迭代結(jié)果趨同,我們從規(guī)劃結(jié)果上就很難看出這種迭代效果;對(duì)比如果在路口、或者復(fù)雜干擾物存在的道路環(huán)境下,路徑規(guī)劃模塊就會(huì)在統(tǒng)計(jì)上體現(xiàn)出快速的迭代效果,極端情況下就是我們經(jīng)常能看到的路徑輸出“劇烈擺動(dòng)”效應(yīng)
當(dāng)車輛直行且道路環(huán)境單純,動(dòng)態(tài)合作目標(biāo)的數(shù)量很少的時(shí)間段內(nèi),自車ego的規(guī)劃模塊輸出將長時(shí)間保持恒定。以Tesla的FSD展示來看,其車載中控屏幕上的藍(lán)色線段即為指定時(shí)間窗內(nèi)的路徑規(guī)劃輸出,長時(shí)間保持恒定。
圖8視頻片段中,當(dāng)車輛執(zhí)行右轉(zhuǎn)操作,發(fā)現(xiàn)路口環(huán)境被臨時(shí)阻擋、且有動(dòng)態(tài)的行人目標(biāo)參與時(shí),自車ego的路徑規(guī)劃模塊在每一個(gè)時(shí)間間隔內(nèi)都會(huì)隨著車輛運(yùn)動(dòng)而不斷刷新規(guī)劃結(jié)果。結(jié)果在Hybrid Planning的第一階段,就不斷更改所謂的最佳路徑搜索結(jié)果,每一個(gè)時(shí)間間隔都會(huì)重新計(jì)算并得到更新的Convex Corridor。這樣所造成的視覺效果即“劇烈抖動(dòng)”。
由彼及此,讀者需要認(rèn)真思考,類似這種Hybrid Planning在復(fù)雜的交通場(chǎng)景下,可用性到底有多高呢?如果圖6中的場(chǎng)景中,相鄰車道存在大量高速和密集的其他車輛,同樣會(huì)造成Hybrid Planning第一階段Coarse Search的搜索結(jié)果巨幅跳動(dòng),遲遲給不出可以執(zhí)行的Convex Corridor結(jié)果,也就無法進(jìn)入第二階段的Continuous Optimization。
實(shí)際上在互聯(lián)網(wǎng)上大量存在的FSD beta測(cè)試視頻中,確實(shí)有不少關(guān)于Tesla FSD beta因?yàn)殄e(cuò)誤的行駛車道選擇,而最終在路口區(qū)域錯(cuò)過左轉(zhuǎn)或者右轉(zhuǎn)機(jī)會(huì)的。所以Tesla顯然還有技術(shù)后手,這就是所謂的“聯(lián)合預(yù)測(cè)”。
針對(duì)多道路參與者的聯(lián)合預(yù)測(cè)和規(guī)劃
預(yù)測(cè)模塊Prediction module是規(guī)劃和控制行為發(fā)生的前提,尤其在相對(duì)復(fù)雜的道路環(huán)境下。預(yù)測(cè)功能出現(xiàn)在每一個(gè)自動(dòng)駕駛系統(tǒng)提供商的技術(shù)框圖之中,不可或缺,但表現(xiàn)形式各不相同。比如Cruise所能提供的復(fù)雜而全面的預(yù)測(cè)體系,包括對(duì)道路參與目標(biāo)的各種類別的行為預(yù)測(cè)都有具體定義和實(shí)現(xiàn);再比如Waymo的預(yù)測(cè),使其關(guān)鍵的ChauffeurNet模仿學(xué)習(xí)駕駛網(wǎng)絡(luò)(小編:等同于規(guī)控模塊)可以工作在一個(gè)很高的可靠性水準(zhǔn)之上。
只有充分的和準(zhǔn)確的預(yù)測(cè)系統(tǒng),才可以讓ChauffeurNet將從人類駕駛員這里模仿而來的技能發(fā)揮到最好水平;還有就是本文的焦點(diǎn)——Tesla FSD系統(tǒng)的預(yù)測(cè)模塊能力,是建立在感知模塊對(duì)于時(shí)間上不連續(xù)和視線遮擋條件下的各種道路參與者強(qiáng)大的感知能力基礎(chǔ)之上的(小編:這部分由Karpathy負(fù)責(zé))。
“Need to plan for ourselves & everyone else Jointly”,圖9給出Tesla的預(yù)測(cè)能力體現(xiàn)為一種對(duì)于自車ego和它車的聯(lián)合運(yùn)動(dòng)規(guī)劃和預(yù)測(cè)(小編:不難理解,對(duì)于自車ego是規(guī)劃plan,對(duì)于它車是預(yù)測(cè)prediction)。對(duì)于聯(lián)合規(guī)劃和預(yù)測(cè),Ashok給出的樣本場(chǎng)景如下圖:
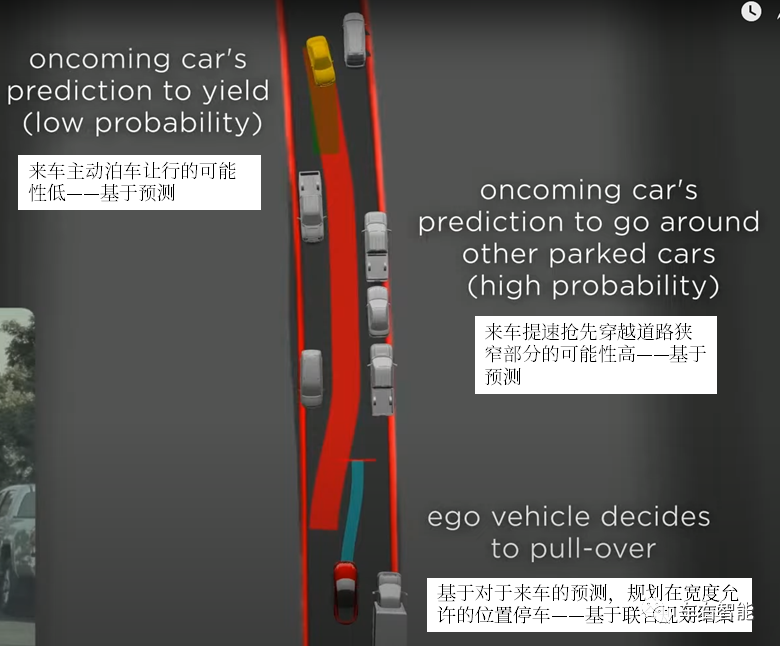
圖十【control and planning-11.png】來自Tesla 2021 AI Day演講視頻截圖和后期加工,取自URL:https://www.youtube.com/watch?v=j0z4FweCy4M&t=4380s;
圖10顯示,自車ego的規(guī)控輸出,是基于對(duì)于道路參與目標(biāo)的預(yù)測(cè)行為而聯(lián)合計(jì)算得出。在來車方向上,如果感知系統(tǒng)給出對(duì)向來車明顯表現(xiàn)出高置信度的某種行為預(yù)測(cè)結(jié)論——道路狹窄部搶行企圖,則自車ego需要據(jù)此預(yù)測(cè)結(jié)果來給出對(duì)應(yīng)的規(guī)劃結(jié)果——上圖為自車ego停車讓行。
這種看著非常類似人類司機(jī)的行為,可謂相當(dāng)智能。但實(shí)際上這在當(dāng)下的自動(dòng)駕駛產(chǎn)業(yè)界是一種主流規(guī)控實(shí)現(xiàn)方式,原理上并沒有什么特立獨(dú)行之處。Tesla的優(yōu)勢(shì)在于,由于市場(chǎng)保有車隊(duì)數(shù)量龐大,所以Tesla確實(shí)有機(jī)會(huì)獲取更大量的外界數(shù)據(jù)實(shí)例。只要“影子模式”的觸發(fā)點(diǎn)足夠細(xì)膩和準(zhǔn)確、數(shù)據(jù)標(biāo)注手段足夠豐富和準(zhǔn)確,Tesla獲取到比競(jìng)爭對(duì)手更多的實(shí)際人類駕駛意圖的機(jī)會(huì)更大更多也很正常(小編:但是目前我們尚未感受到FSD beta展現(xiàn)出更高的行駛能力,這也是事實(shí))。
路徑規(guī)劃中的博弈現(xiàn)象
前述Tesla強(qiáng)調(diào)的Jointly Planning聯(lián)合規(guī)劃,如果再往高級(jí)的形式演化,就是人類獨(dú)有的“博弈行為”在道路駕駛策略上的一種智能體現(xiàn)。以上圖11的視頻中,就是對(duì)應(yīng)圖10當(dāng)中3D形式表現(xiàn)的聯(lián)合規(guī)劃場(chǎng)景實(shí)景。我們可以從視頻中感受到,F(xiàn)SD beta的自車ego通過“博弈”勝了第一輛對(duì)向車輛,迫使對(duì)方率先選擇讓路/Yield行為;但自車ego也主動(dòng)選擇避讓了第二輛車輛(小編:主動(dòng)避讓也可以看作博弈的勝利,避讓行為并不是關(guān)鍵,主動(dòng)選擇才是關(guān)鍵行為)……當(dāng)ego的感知系統(tǒng)收到第二輛車的人類司機(jī)明確的讓行意圖之后,再次起步。
去年夏天,華為極狐曾在上海車展前期有幾段上海金橋地區(qū)的自動(dòng)駕駛demo視頻流出。小編記得極狐可以做到在通過十字路口無保護(hù)左轉(zhuǎn)時(shí),做出類似人類的壓線動(dòng)作——左轉(zhuǎn)車輛會(huì)選擇緩慢切入并擠占對(duì)向直行車輛的正常行駛直線,從而盡快獲取快速通過的機(jī)會(huì)。這也是人類經(jīng)常采用的一種博弈行為,可以說是交通繁忙地段的約定俗成。當(dāng)然,我們并不知道華為的自動(dòng)駕駛系統(tǒng)路徑規(guī)劃方案在這種“博弈”現(xiàn)象的背后的實(shí)現(xiàn)機(jī)制和訓(xùn)練機(jī)制(小編:如果是模仿學(xué)習(xí)的結(jié)果,類似waymo的chauffeurNet,則不足為奇)。
暫時(shí)的段落
好!截至目前,我們已經(jīng)研究了Hybrid Planning方法在第一階段——Coarse Search和聯(lián)合規(guī)劃和預(yù)測(cè)方面的技術(shù)細(xì)節(jié),F(xiàn)SD在這個(gè)階段可以給出Convex Corridor路徑選擇(范圍)了,這是個(gè)基礎(chǔ)中的基礎(chǔ)。并且FSD可以在標(biāo)準(zhǔn)道路和相對(duì)復(fù)雜的路況下利用預(yù)測(cè)能力自如規(guī)劃了…….但是,人類世界的路況永遠(yuǎn)是復(fù)雜的、多樣的,我們不可能假設(shè)所有人都遵循規(guī)則,且交通永遠(yuǎn)井井有條如“預(yù)測(cè)”般發(fā)展。所以在后面章節(jié)我們會(huì)介紹Tesla是如何針對(duì)復(fù)雜交通環(huán)境,進(jìn)一步給出解決方法的。
審核編輯:劉清
-
視覺傳感器
+關(guān)注
關(guān)注
3文章
250瀏覽量
22903 -
自動(dòng)駕駛系統(tǒng)
+關(guān)注
關(guān)注
0文章
65瀏覽量
6781
原文標(biāo)題:有板有眼、中規(guī)中矩——記Tesla Autopilot的規(guī)劃和控制系統(tǒng)(上)
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛識(shí)別技術(shù)有哪些
自動(dòng)駕駛的傳感器技術(shù)介紹
深度學(xué)習(xí)在自動(dòng)駕駛中的關(guān)鍵技術(shù)
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
邊緣計(jì)算與自動(dòng)駕駛系統(tǒng)如何結(jié)合
自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論