 【產品應用】三個步驟,讓你的EtherCAT電機轉起來
【產品應用】三個步驟,讓你的EtherCAT電機轉起來
 前言
前言
說了這么多,這和EtherCAT有關系么?當然有,對于EtherCAT或者任意一個總線來說,都需要知道接入設備的類型及數據格式,否則是無法解釋數據的,通常有兩種方式:
事先約定:通過事先約定的來確定工作如何進行。這就像發個信息說“我們晚上8點一起看電影吧“一樣簡單,這是小編喜歡它的原因。但這個約定有時就像友誼的小船說翻就翻,對方招呼也不打,只剩你一個人還傻傻地站在的電影院門口;
協議規范:定義一套完整的規范,大家一起遵循它。規范通常都很多很雜,學習成本較高,按規范開發就像是你去做的基金定投,短期收益低,但穩定可靠。
ESI(EtherCAT Slave Information):這個是從站提供的標準描述規范文件,該文件描述了設備的類型、數據格式及一些“特殊癖好”,這就相當于USB的設備描述符+接口描述符。
ENI(EtherCAT Network Information):這個是用于給主站啟動時,加載的標準配置規范文件,用于初始化所有的從站。這個文件描述了從站的數量、每個從站的類型及數據格式、DC等配置信息。
準備工作
生成ENI文件
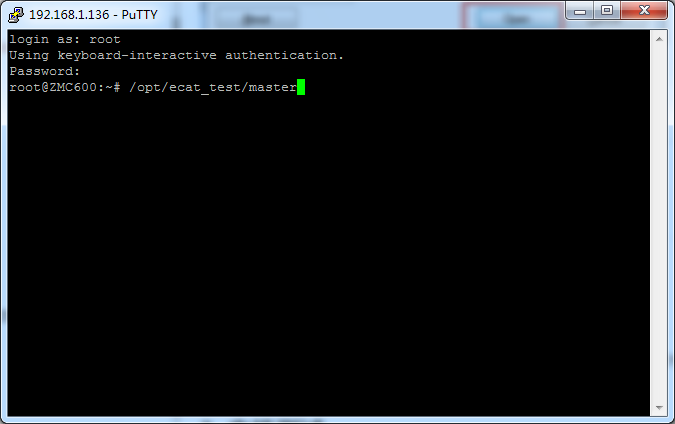
1. 啟動EtherCAT服務
打開putty.exe軟件,輸入運動控制器NET1的默認IP地址:192.168.1.136,賬號和密碼為root。
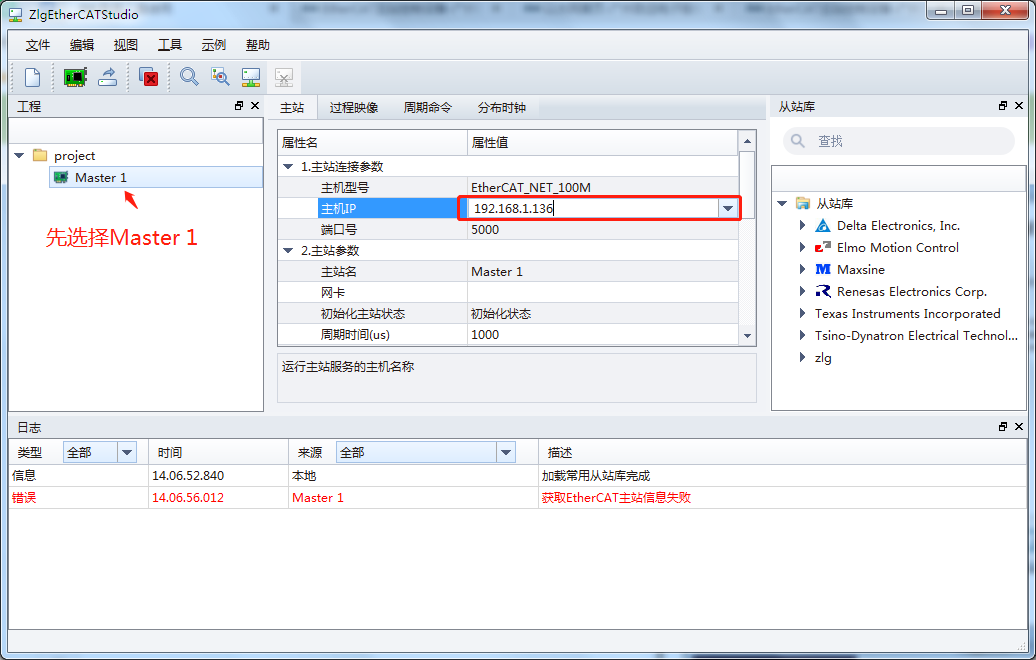
2.連接設備
啟動ZlgEtherCatStudio上位機配置軟件,輸入運動控制器NET1的默認IP地址:192.168.1.136,點擊回車。
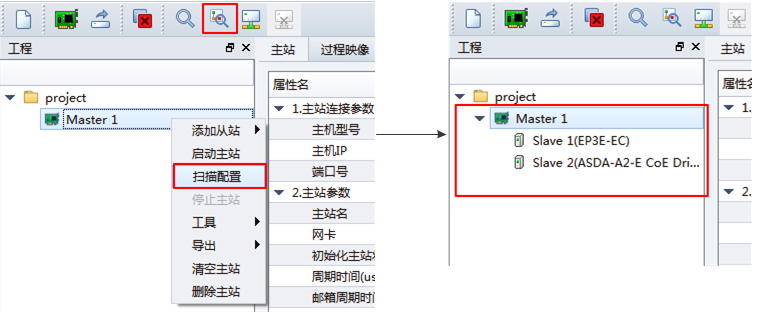
3. 掃描網絡
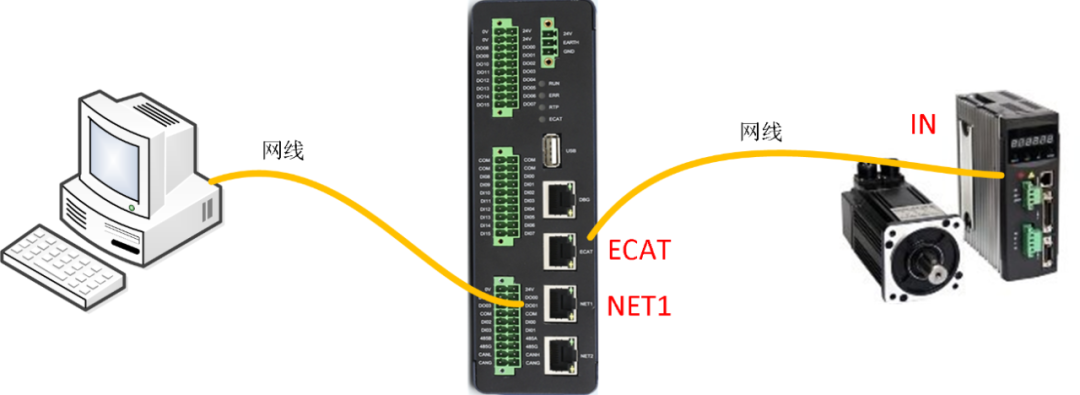
通過掃描EtherCAT總線,來識別接入了多少個設備,并將其網絡拓撲添加到本地主站樹節點。
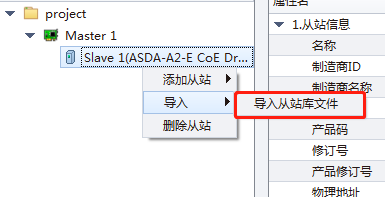
4.導入ESI
如果該從站無法正確識別,可手動導入從站ESI(EtherCAT Slave Information)文件。
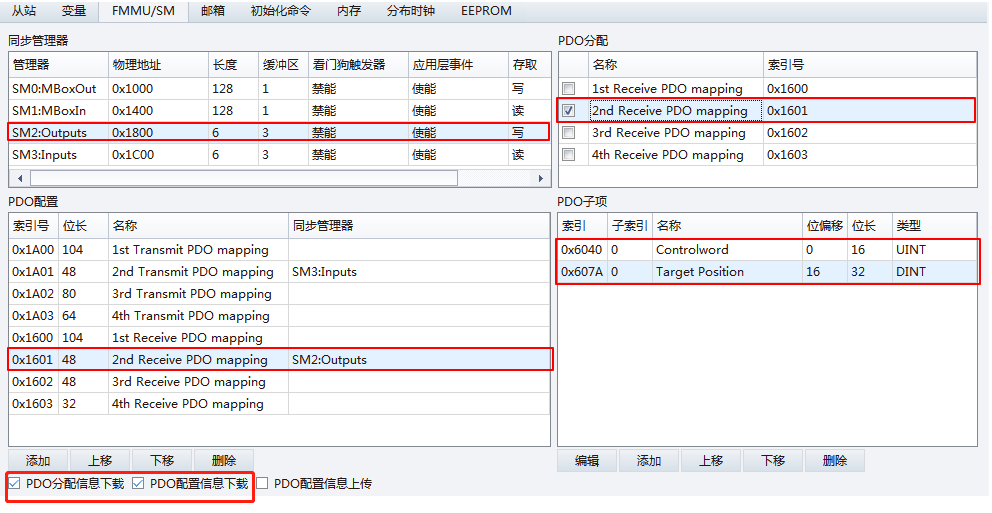
5. 配置FMMU
一般應用不需配置從站FMMU/SM,使用從站默認配置即可。當需要改變輸入輸出變量時,可通過本配置項配置。
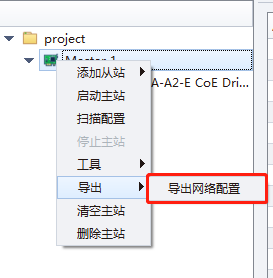
6. 生成ENI文件
導出ENI,取名為text_eni。
 加載ENI文件
加載ENI文件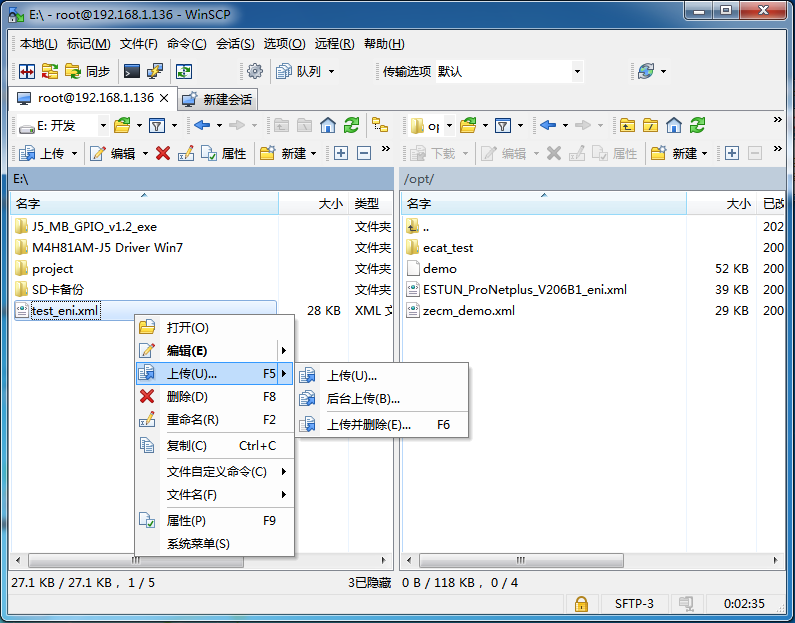
解釋輸入輸出數據
在CiA402規范中,定義了伺服類設備的數據格式,這里給大家介紹一下最常用的位置控制模式的數據格式。
1.輸出數據

Controlword:控制字,16Bit,主要用于控制電機上下電,抱閘等;
Target Position:目標位置,32Bit,用于控制電機轉到指定的位置。

Statusword:控制字,16Bit,主要用于控制電機上電、下電、抱閘等操作;
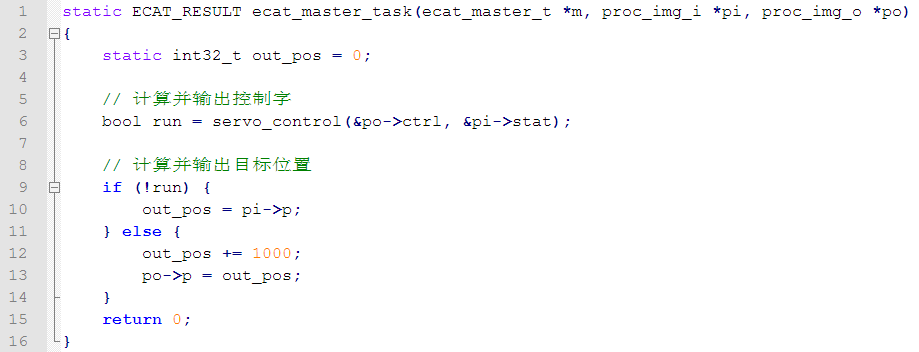
Position Actual Value:實際位置,用于反饋電機當前所在位置。我們要做的就是周期性解釋以上4個數據,然后執行對應的操作即可,可參考如下代碼:
電機測試
1. move_test
angle表示電機轉動角度,輸入該命令后,電機會一直重復執行輸出:先正轉angle度,然后反轉angle度。
輸入move_test 90,仔細觀察電機的轉動,如果發現轉動的角度比90度小,則說明脈沖當量偏小,應適當增加。推薦10倍住上遞增進行測試,該值默認為1。
其它補充1. 關于脈沖當量
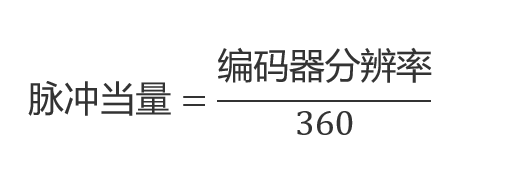
編碼器的分辨率,可以從伺服驅動器的手冊得到。
2. 關于EtherCAT主站









-
致遠電子
+關注
關注
13文章
406瀏覽量
31303
原文標題:【產品應用】三個步驟,讓你的EtherCAT電機轉起來
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論