

01、整體測(cè)試方案
基于關(guān)鍵場(chǎng)景的預(yù)期功能安全測(cè)試評(píng)價(jià),需要綜合各類(lèi)技術(shù)手段,在有限的測(cè)試中證明被測(cè)系統(tǒng)風(fēng)險(xiǎn)滿足接受準(zhǔn)則,并進(jìn)一步說(shuō)明被測(cè)系統(tǒng)預(yù)期功能安全(SOTIF)性能水平。關(guān)鍵場(chǎng)景由基礎(chǔ)場(chǎng)景和觸發(fā)條件構(gòu)成,工作組根據(jù)專(zhuān)家經(jīng)驗(yàn)分析與系統(tǒng)過(guò)程理論分析得到了預(yù)期功能安全觸發(fā)條件列表,并通過(guò)多維測(cè)試的手段對(duì)被測(cè)車(chē)輛進(jìn)行評(píng)估,從而以分級(jí)的方式對(duì)測(cè)試車(chē)輛進(jìn)行SOTIF能力驗(yàn)證,其中分級(jí)驗(yàn)證模塊中基礎(chǔ)紅色區(qū)域代表支撐準(zhǔn)入認(rèn)證區(qū)域。本年度預(yù)期功能安全工作組以HWP功能為例,探索支撐自動(dòng)駕駛功能認(rèn)證的預(yù)期功能安全測(cè)試評(píng)價(jià)方案,并于本次試驗(yàn)驗(yàn)證其中關(guān)于交通擾動(dòng)及感知擾動(dòng)的SOTIF性能。
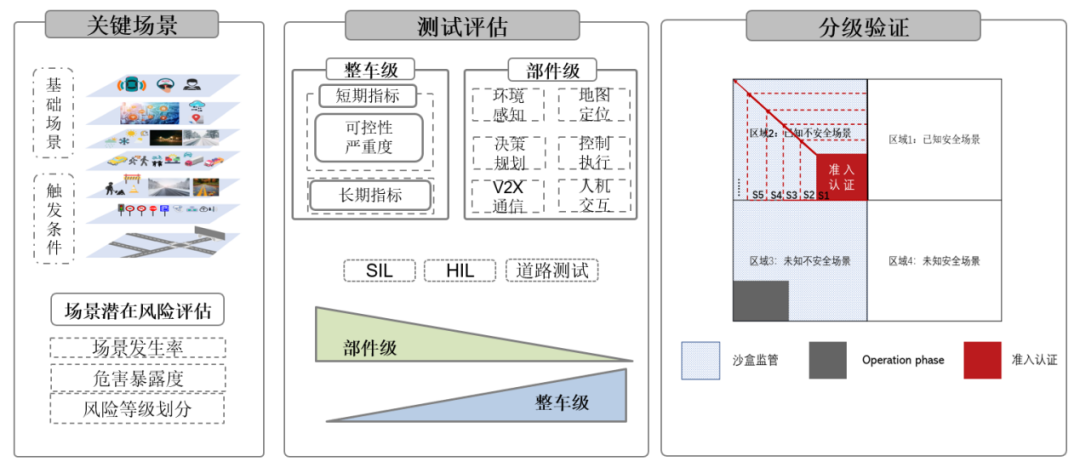
圖1 基于關(guān)鍵場(chǎng)景的SOTIF測(cè)試整體方案
02
HWP SOTIF測(cè)試用例
基于中國(guó)優(yōu)秀謹(jǐn)慎駕駛員模型以及環(huán)境感知系統(tǒng)觸發(fā)條件,設(shè)計(jì)HWP功能的SOTIF測(cè)試用例。試驗(yàn)分為Cut-in、Cut-out、Deceleration三大類(lèi)場(chǎng)景,主要關(guān)注他車(chē)橫向切入速度、縱向相對(duì)距離等參數(shù),分別在人類(lèi)駕駛員發(fā)生碰撞的邊界工況中選取了本次試驗(yàn)的測(cè)試用例。并在此基礎(chǔ)上疊加了環(huán)境感知系統(tǒng)觸發(fā)條件如降雨、降霧、低光照等,構(gòu)成了環(huán)境感知系統(tǒng)測(cè)試用例。試驗(yàn)車(chē)速為20km/h~80km/h,下圖為測(cè)試用例選取示意圖。

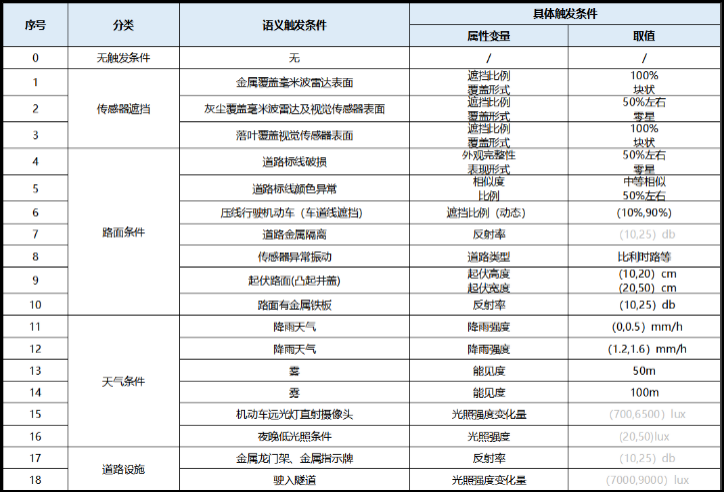
圖2 測(cè)試用例選取示意圖
03
測(cè)試團(tuán)隊(duì)與儀器設(shè)備
本次試驗(yàn)的測(cè)試場(chǎng)地為國(guó)家智能網(wǎng)聯(lián)汽車(chē)(長(zhǎng)沙)測(cè)試區(qū)內(nèi)的模擬高速公路、雨霧模擬區(qū)等,該場(chǎng)地最大限度的還原了高速場(chǎng)景及特殊環(huán)境的測(cè)試工況,保障了試驗(yàn)結(jié)果的真實(shí)有效性。測(cè)試區(qū)主要分為五大功能分區(qū)——城市測(cè)試區(qū)、高速測(cè)試區(qū)、鄉(xiāng)村測(cè)試區(qū)、越野測(cè)試區(qū)和集群測(cè)試區(qū)。本次試驗(yàn)測(cè)試團(tuán)隊(duì)由中汽院(湖南)公司、清華大學(xué)、同濟(jì)大學(xué)、中國(guó)一汽、吉林大學(xué)等多家單位人員共同組成,專(zhuān)項(xiàng)負(fù)責(zé)整體測(cè)試實(shí)施工作。
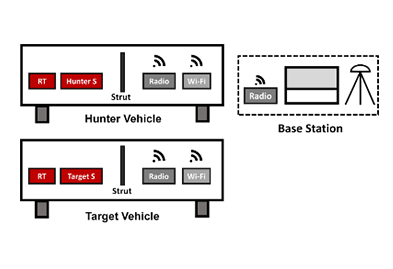
本次被測(cè)車(chē)輛為中國(guó)一汽提供的具備HWP功能的紅旗EHS9車(chē)型,如圖3所示。自動(dòng)駕駛平臺(tái)系統(tǒng)及高精度定位設(shè)備等測(cè)試設(shè)備在本次試驗(yàn)中發(fā)揮重要作用,如圖4所示。
04、交通擾動(dòng)測(cè)試
為驗(yàn)證交通擾動(dòng)下車(chē)輛的預(yù)期功能安全性能,測(cè)試團(tuán)隊(duì)搭建了自動(dòng)駕駛平臺(tái)車(chē)并根據(jù)試驗(yàn)工況設(shè)計(jì)自動(dòng)駕駛平臺(tái)車(chē)運(yùn)動(dòng)軌跡,其中包括Cut-in、Cut-out、Deceleration三大類(lèi)場(chǎng)景,并對(duì)不同車(chē)輛參數(shù)(橫向切入速度、相對(duì)縱向距離等)下的工況進(jìn)行了測(cè)試,最終對(duì)測(cè)試結(jié)果進(jìn)行了分析對(duì)比,得到了預(yù)期的測(cè)試結(jié)果。
Cut-in場(chǎng)景表現(xiàn)為自車(chē)直行,他車(chē)從旁邊車(chē)道以相對(duì)距離為觸發(fā)并以一定的橫向速度切入自車(chē)車(chē)道,試驗(yàn)記錄了各個(gè)車(chē)輛數(shù)據(jù)信息,并分析了測(cè)試結(jié)果。
Cut-out場(chǎng)景表現(xiàn)為自車(chē)直行,前車(chē)以前前車(chē)的距離為觸發(fā)并以一定的橫向速度切出自車(chē)車(chē)道,試驗(yàn)記錄了各個(gè)車(chē)輛數(shù)據(jù),并分析了測(cè)試結(jié)果。
Deceleration場(chǎng)景表現(xiàn)為自車(chē)直行,前車(chē)以一定的減速度和相對(duì)距離為觸發(fā)開(kāi)始急剎,試驗(yàn)記錄了各個(gè)車(chē)輛數(shù)據(jù),并分析了測(cè)試結(jié)果。
05、感知擾動(dòng)測(cè)試
測(cè)試團(tuán)隊(duì)在上述實(shí)驗(yàn)的基礎(chǔ)之上疊加環(huán)境感知系統(tǒng)觸發(fā)條件,以測(cè)試車(chē)輛在不同觸發(fā)條件作用下的預(yù)期功能安全性能。實(shí)驗(yàn)根據(jù)場(chǎng)地條件,進(jìn)行了包括傳感器遮擋、路面條件、天氣條件以及道路設(shè)施四個(gè)大類(lèi)共計(jì)18個(gè)小類(lèi)觸發(fā)條件的實(shí)驗(yàn)。
其中,傳感器遮擋通過(guò)使用落葉、金屬物、灰塵等對(duì)攝像頭或毫米波雷達(dá)進(jìn)行遮擋實(shí)現(xiàn);天氣條件包括對(duì)攝像頭或毫米波雷達(dá)感知造成影響的雨天、霧天及光照條件等觸發(fā)條件;路面條件包括不同屬性路面材質(zhì)和不同特征車(chē)道標(biāo)線等觸發(fā)條件;道路設(shè)施條件包括了引起毫米波反射和信號(hào)屏蔽的波形金屬護(hù)欄、龍門(mén)架及隧道路段。
06、實(shí)驗(yàn)數(shù)據(jù)采集
本次試驗(yàn)采集了車(chē)載攝像頭視頻、實(shí)車(chē)真值數(shù)據(jù)、感知數(shù)據(jù)、無(wú)人機(jī)航測(cè)數(shù)據(jù)以及車(chē)內(nèi)人員fNIRS近紅外血氧數(shù)據(jù)。其中實(shí)車(chē)真值數(shù)據(jù)包括測(cè)試中全部車(chē)輛的位置、速度、航向角等物理參數(shù)信息,可用于計(jì)算測(cè)試評(píng)價(jià)指標(biāo)并驗(yàn)證車(chē)輛的預(yù)期功能安全;感知數(shù)據(jù)包括系統(tǒng)識(shí)別到的物體信息、車(chē)道線信息等,可用于分析自動(dòng)駕駛系統(tǒng)的感知能力;無(wú)人機(jī)航測(cè)數(shù)據(jù)為俯視視角下車(chē)輛的數(shù)據(jù)信息,可補(bǔ)充到測(cè)試指標(biāo)的計(jì)算;fNIRS近紅外血氧數(shù)據(jù)可以反映人類(lèi)大腦活動(dòng)時(shí)氧合血紅蛋白和脫氧血紅蛋白的變化情況,可用于分析車(chē)內(nèi)乘員對(duì)不同危險(xiǎn)工況的反應(yīng)特征。豐富多樣的數(shù)據(jù)信息對(duì)于自動(dòng)駕駛的預(yù)期功能安全研究具有寶貴的科研價(jià)值。
審核編輯:郭婷
-
感知系統(tǒng)
+關(guān)注
關(guān)注
1文章
74瀏覽量
16170 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14206瀏覽量
169597
原文標(biāo)題:支撐自動(dòng)駕駛功能認(rèn)證的預(yù)期功能安全實(shí)車(chē)測(cè)試方法實(shí)踐
文章出處:【微信號(hào):談思實(shí)驗(yàn)室,微信公眾號(hào):談思實(shí)驗(yàn)室】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
小鵬汽車(chē)斬獲兩項(xiàng)國(guó)際頂級(jí)安全認(rèn)證 ISO 26262功能安全流程認(rèn)證和ISO 21448預(yù)期功能安全(SOTIF)流程認(rèn)證

感應(yīng)電機(jī)滑模變結(jié)構(gòu)控制系統(tǒng)的半實(shí)物仿真
基于混合磁調(diào)制與自適應(yīng)陷波濾波的MT9221寬頻域電流傳感技術(shù)
智能網(wǎng)聯(lián)汽車(chē)預(yù)期功能安全(SOTIF)開(kāi)發(fā)解決方案

FSC中高壓無(wú)擾動(dòng)周波快速切換系統(tǒng) 雙電源快切柜 介紹

DCM635無(wú)擾動(dòng)快切裝置切換安全嗎,無(wú)擾動(dòng)快切裝置有哪些閉鎖功能?
DCM635無(wú)擾動(dòng)快切裝置有哪些切換方式?無(wú)擾動(dòng)快切裝置切換原理是什么?
虹科技術(shù)前沿 TSN網(wǎng)絡(luò)中時(shí)間感知整形器的性能驗(yàn)證實(shí)測(cè)

怎樣減小或消除擾動(dòng)產(chǎn)生的穩(wěn)態(tài)誤差
TSN網(wǎng)絡(luò)中時(shí)間感知整形器的性能驗(yàn)證實(shí)測(cè)

貴州某煤礦配電系統(tǒng)無(wú)擾動(dòng)快切裝置改造解決方案

帶你快速了解FSC無(wú)擾動(dòng)周波快速切換柜
無(wú)擾動(dòng)快切裝置是什么?無(wú)擾動(dòng)快切裝置原理是什么?無(wú)擾動(dòng)快切裝置有哪些功能?
晃電對(duì)油氣運(yùn)輸管網(wǎng)的影響以及如何進(jìn)行有效的晃電治理
新型量子傳感技術(shù)可見(jiàn)光測(cè)量紅外區(qū)域的擾動(dòng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論