") 看完這8篇論文,你會完全掌握桌面六軸協(xié)作機器人!
看完這8篇論文,你會完全掌握桌面六軸協(xié)作機器人!
協(xié)作機器人(collaborative robot)簡稱cobot或co-robot,是設(shè)計和人類在共同工作空間中有近距離互動的機器人,是人類和電腦控制的通用機器人之間的直接物理互動的設(shè)備。
協(xié)作機器人的機能包括了和人類近距離互動合作、對周圍人類進行安全保護。
今天,給大家推薦一些協(xié)作機器人的論文,這些論文均來自國內(nèi)外各所知名高校,這8篇論文資料,主要使用的產(chǎn)品是桌面六軸協(xié)作機器人mycobot系列,建議收藏學習。
① 使用SVM、Haar Cascade分類器和機械臂檢測使用口罩防止COVID-19傳播的情況
作者:Andini Pratiwi, Erna Budhiarti Nababan , Amalia
大學:蘇門答臘大學計算機科學和信息技術(shù)學院,印度尼西亞
摘要:需要進行監(jiān)測,通過實施使用口罩等衛(wèi)生協(xié)議,特別是對那些不戴口罩或仍有問題的人,保持COVID-19病例的傳播率。在這項研究中,系統(tǒng)利用機器人的力量來識別訪客是否戴口罩,如果檢測到用戶沒有戴口罩,則自動分發(fā)口罩。用戶臉部檢測過程中使用Haar Cascade分類器算法來裁剪圖像,聚焦于臉部區(qū)域,并使用SVM(支持向量機)對是否戴口罩的用戶進行分類。對于被檢測為不戴口罩的用戶,myCobot Pi在吸氣泵的支持下,將向用戶分發(fā)口罩。使用myCobot-Pi作為基于樹莓派的機械臂,可以在最小規(guī)格和尺寸的設(shè)備上應(yīng)用該系統(tǒng)。通過采取41個檢測案例的試驗,發(fā)現(xiàn)有29個案例成功地檢測到口罩的正確使用。此外,在這項研究中,我們使用PP片狀塑料保護器來代替口罩包裝,因為它可以由吸氣泵正常攜帶。

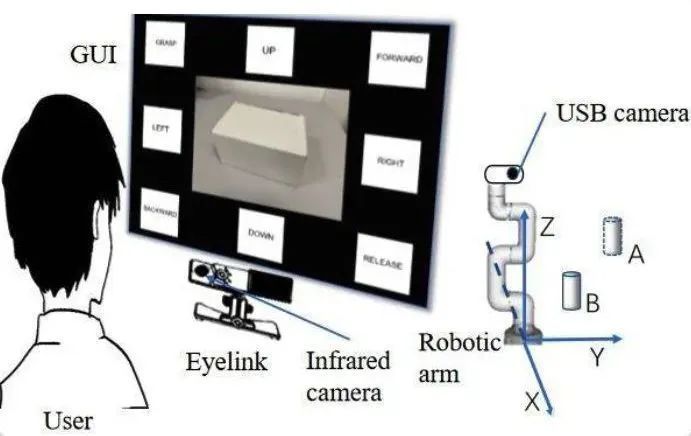
②基于眼動追蹤的非侵入式機械臂控制系統(tǒng)
作者:Zichen Kong, Shuying Rao, Hui Yang, Wenli Lan, Yue Leng, Sheng Ge
大學:東南大學
摘要:有嚴重語言和運動障礙的人,由于無法有效的控制肌肉的移動,可能存在與外部世界溝通困難的情況。在本研究中,開發(fā)了一種基于眼動追蹤的非侵入式機械臂控制系統(tǒng)。在充分考慮機械臂的空間特性后,進行了以用戶為中心的設(shè)計過程,其中包含八個命令和一個中間實時視頻傳輸用戶界面。此外,評估了三種眼動注視點處理算法。其中,基于密度的空間聚類和噪聲算法的平均準確率達到了 99.3%。在此基礎(chǔ)上,設(shè)計并進行了離線實驗,5名被試都能夠發(fā)送準確率高于 99% 的命令。
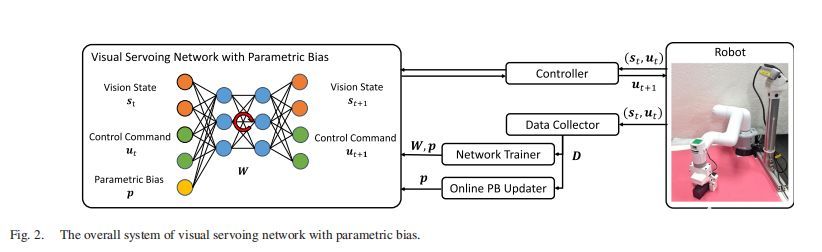
③ 考慮到身體時空變化的低剛度機器人視覺伺服的自我監(jiān)督學習
作者:Kento Kawaharazuka, IEEE會員
大學:澳大利亞莫納什大學
摘要:在這項研究中,我們研究了在低剛度機器人中通過視覺伺服來抓取物體。與剛性機器人相比,低剛度機器人很難按預期處理自己的身體,視覺和身體之間的校準需要一些時間。此外,機器人必須不斷適應(yīng)其身體的變化,如相機位置的變化和因老化而導致的關(guān)節(jié)變化。因此,我們開發(fā)了一種方法,讓低硬度機器人自主地學習其身體的視覺伺服。我們還開發(fā)了一種機制,可以根據(jù)時間上的身體變化來適應(yīng)性地改變其視覺伺服狀態(tài)。我們將方法應(yīng)用于一個低剛度的6軸機械臂-MyCobot,并通過進行基于視覺伺服的物體抓取實驗確認其有效性。
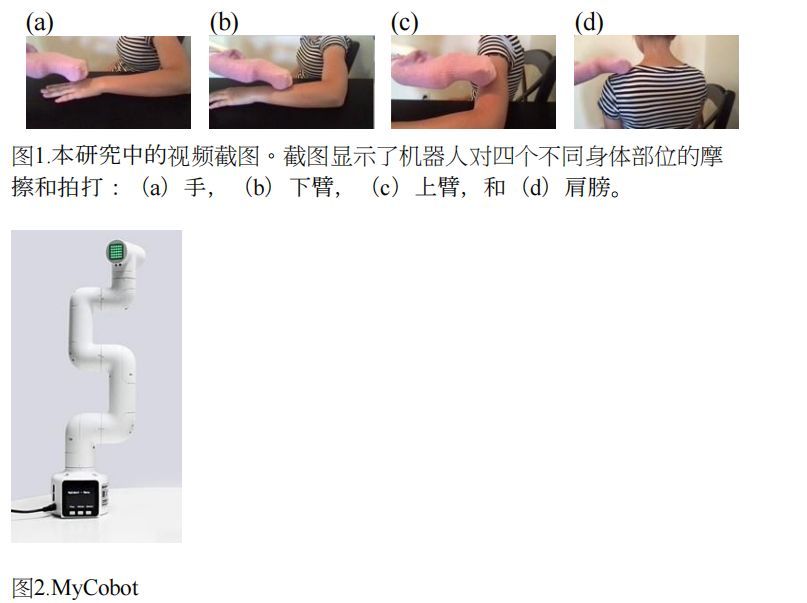
④機器人觸摸發(fā)送慰問:發(fā)送者和接收者的不同觀點
作者:Rachel H. Y. Au、Katrina Ling、Marlena R. Fraune
大學:新墨西哥州立大學、豐田研究院
摘要:為了減少社會孤立感,人們越來越嚴重地依賴在線社會交流方法。然而,這種交流方式缺乏表達情感安慰人的最關(guān)鍵因素之一:身體接觸。在目前的工作中,我們研究了人們對具有情感觸摸功能的機器人的看法,對具有情感觸摸功能的機器人傳達來自另一個人的同情心的看法。
我們在美國和日本進行了兩項在線研究,調(diào)查個人如何評價由他們發(fā)送給朋友的想象中的機器人觸摸手勢(研究1)和由他們從朋友那里收到的機器人觸摸手勢(研究2)。我們發(fā)現(xiàn),與其他類型的觸摸相比,同情的發(fā)送者喜歡機器人拍打或摩擦肩膀,但更愿意通過文字或GIF來表達同情,而不是通過機器人介導的觸摸。相反,與其他一些表達同情的方式,特別是短文相比,接受者在收到機器人觸摸手勢表示同情時,會感受到更多的同情和社會支持。目前的研究結(jié)果強調(diào)了發(fā)送者和接受者對機器人情感觸摸的不同觀點,以及對機器人情感觸摸評價的潛在文化和個體差異。
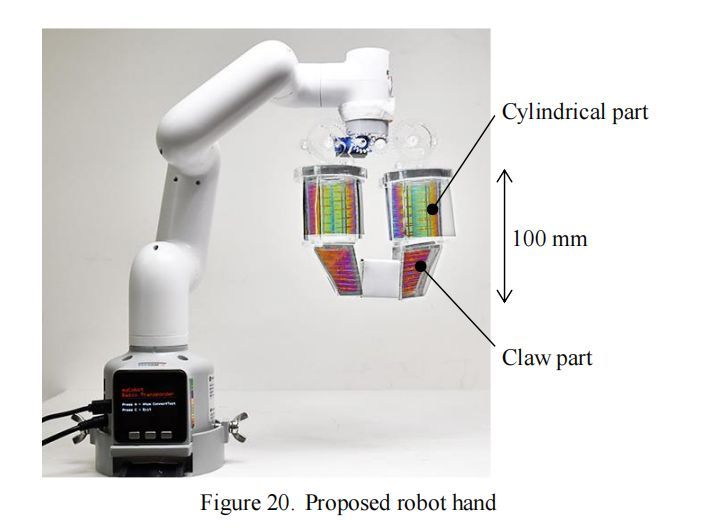
⑤ 機械手臂的抓取狀態(tài)的可視化
作者:Haruka Hyodo和Yasuyuki Yamada,IEEE會員
大學:澳大利亞莫納什大學
摘要:當機器或機器人在位置控制下工作時,根據(jù)機器人外觀的視覺變化,很難直觀地確認機器人對施加在物體上的力的反應(yīng),或要互動的物體的硬度或質(zhì)量。當人類和機器人在同一空間內(nèi)合作或工作時,如果我們能從視覺上理解機器人,了解機器人的狀態(tài),互動將更加順利和安全。
此外,目前正在研究能夠靈活地適應(yīng)人和各種外部環(huán)境的軟體機器人技術(shù)。在本研究中,我們的目標是開發(fā)一種技術(shù),可以傳達軟體機器人的狀態(tài),該機器人可以根據(jù)目標物體的變形情況,明確地改變其外觀。我們試圖通過放大由光彈性效應(yīng)引起的顏色變化,使軟體機器人的內(nèi)部壓力可視化。放大由光彈性效應(yīng)引起的顏色變化使用折紙和kirigami結(jié)構(gòu)。此外,作為一項可行性研究,我們開發(fā)了一個軟體機器人手,可以直觀地表明被抓取物體的質(zhì)量和硬度。
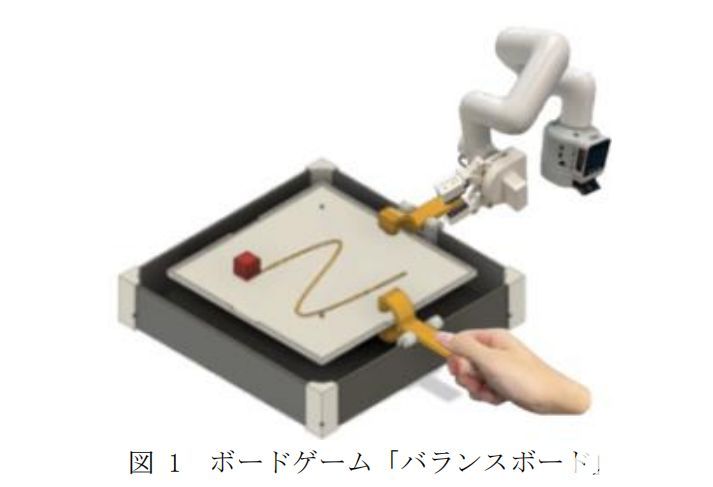
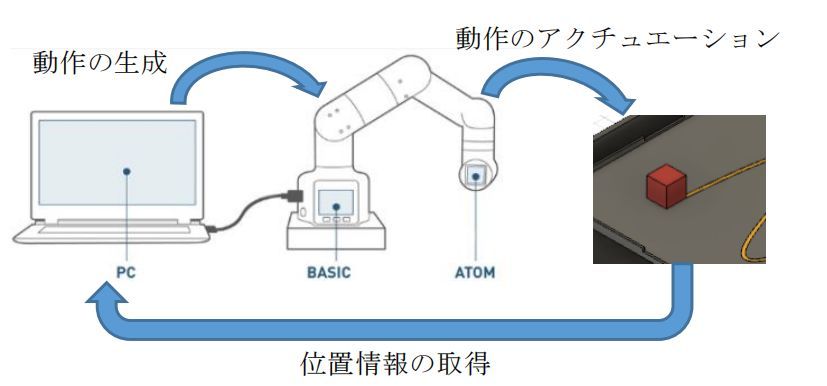
⑥人機協(xié)作! 關(guān)于人類和機器人之間的物理合作所產(chǎn)生的統(tǒng)一感
作者:住田拓郎、 上村綜次郎、長谷川孔明、 岡田美智男、大島直樹
大學:日本豐橋技術(shù)科學大學
摘要:人與人之間共同實現(xiàn)某種目標需要合作。人和機器人,或者機器人之間,有沒有可能按照對方的 "我希望你這樣做 "的感覺來行動?
人類和機器人,或者機器人和人類以及機器人,是否有可能對對方的 "我希望你這樣做 "的感覺做出反應(yīng)?在這個演講中,我們將討論人類與機器人通過物理合作為實現(xiàn)目標作出貢獻的可能性。
我們提出了一個機器人,通過使人和機器人為實現(xiàn)一個目標而互相幫助,并伴隨著身體的協(xié)調(diào),創(chuàng)造一種團結(jié)的感覺。
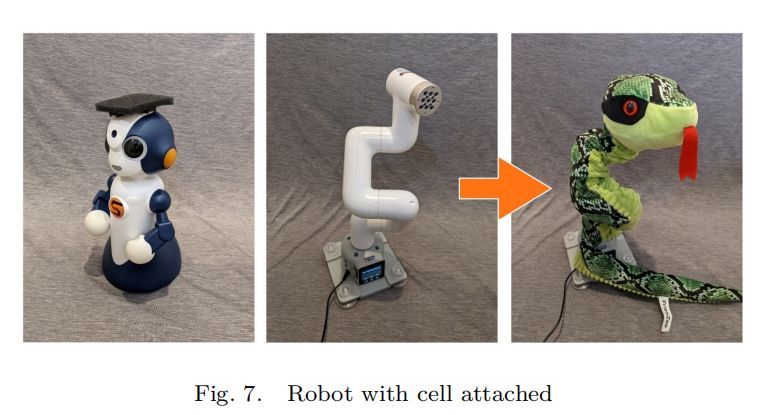
⑦ 軟體機器人的觸覺傳感系統(tǒng)
作者:Taiki Majima1 和Kazunori Takashio2
大學:澳大利亞莫納什大學
摘要:在這項研究中,我們提出了一個名為SoftTactile skIn (STI) 的系統(tǒng),它由一個人造外皮和細胞組成。STI可以連接到現(xiàn)有的機器人上,使其具有靈活性和觸覺。人工外皮采用海綿結(jié)構(gòu),易于獲得和加工,而光學傳感器是一個小型的光反射器。為了處理多個細胞作為一個表面的信息,我們的系統(tǒng)根據(jù)傳感器的數(shù)值生成圖像,并使用卷積神經(jīng)網(wǎng)絡(luò)估計狀態(tài),該網(wǎng)絡(luò)在圖像識別領(lǐng)域表現(xiàn)出良好的性能。
該系統(tǒng)的觸覺傳感器能夠在特定條件下以91.4%的準確率估計接觸位置,并以81.0%的準確率估計五個接觸動作。STI有望在未來擴大軟體機器人的人機交瓦(HRI)的范圍。本文的貢獻在于提出了一種為基于傳統(tǒng)機器人的軟體機器人提供觸覺傳感器的方法,該方法結(jié)合了細胞-皮膚和光學傳感器的特點,能夠在不把細胞鋪滿整個表面的情況下進行大范圍的表面感應(yīng)。
⑧ 協(xié)作機器人智能控制與人機交互研究綜述
作者:黃海豐,劉培森,李擎苣,于欣波
大學:北京科技大學
摘 要:協(xié)作機器人是一類能夠在共享空間中與人類交互或在人類附近安全工作的新型工業(yè)機器人,由于其輕質(zhì)、安全的特點,在柔性制造、社會服務(wù)、醫(yī)療健康、防災(zāi)抗疫等多個領(lǐng)域展現(xiàn)出了良好的應(yīng)用前景,受到工業(yè)界和學術(shù)界的廣泛關(guān)注,成為當前機器人領(lǐng)域的研究熱點之一。
協(xié)作機器人需要具備良好的控制性能確保與人交互的安全性,集成多種傳感器感知外 部環(huán)境并應(yīng)用智能控制理論與方法來確保高效的協(xié)作行為。
在我國,人機協(xié)作已列入《智能制造 2025》和《新一代人工智能發(fā) 展規(guī)劃》重點支持研究計劃。
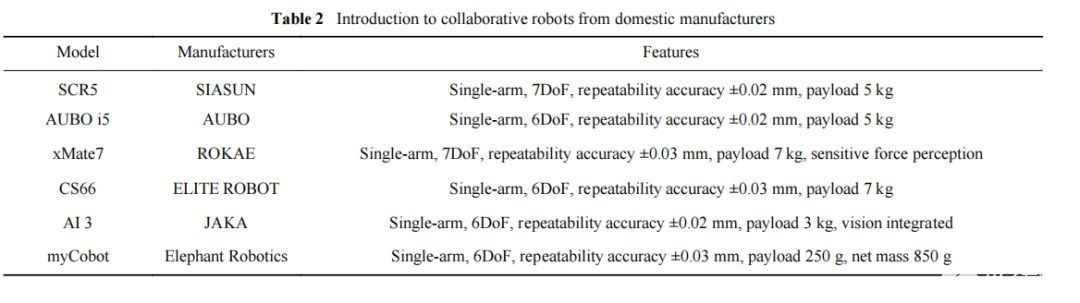
本文主要介紹了國內(nèi)外幾款常見的協(xié)作機器人,機器人基于感知信息的控制、高精度跟蹤控 制、交互控制等智能控制方法,并圍繞機器人與人執(zhí)行協(xié)作任務(wù)的高效性,對機器人的人類意圖估計和技能學習方法進行了討論。最終對協(xié)作機器人未來的發(fā)展方向進行了展望.
-
機器人
+關(guān)注
關(guān)注
211文章
28476瀏覽量
207421 -
人工智能
+關(guān)注
關(guān)注
1792文章
47377瀏覽量
238882 -
機器視覺識別
+關(guān)注
關(guān)注
0文章
9瀏覽量
5351 -
深度學習
+關(guān)注
關(guān)注
73文章
5506瀏覽量
121260 -
人工智能算法
+關(guān)注
關(guān)注
0文章
61瀏覽量
5252
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】+兩本互為支持的書

焊接機器人六個軸分別是什么作用

優(yōu)傲機器人升級高負載協(xié)作機器人,助力客戶生產(chǎn)效率飛躍
協(xié)作機器人拽拖示教詳解
如何正確操作六軸焊接機器人
六軸焊接機器人多久檢修一次
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設(shè)計
工業(yè)4.0中的機器人向協(xié)作機器人演進
六軸焊接機器人的操作流程

六軸協(xié)作機器人(TB6-R5)各軸 ±90° 翻轉(zhuǎn)運動測試 | 泰科機器人 #協(xié)作機器人
埃斯頓獲首張工業(yè)六軸機器人cETLus證書
PCB行業(yè):用協(xié)作機器人,就選大族機器人
協(xié)作機器人和工業(yè)機器人區(qū)別在哪?
ABB機器人拓展其免費的Wizard簡易編程軟件的應(yīng)用范圍






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論