 電磁智能車的電感排布和運行原理
電磁智能車的電感排布和運行原理
智能車比賽每年都會有許多小白新手加入,大多數同學都是以電磁入手練習,然后逐漸再入手到攝像頭等等,所以對于電磁算法有了一定的研究之后,對于其他的算法也就會有一-定的上手能力,但是電磁算法雖然好理解,但是想讓車跑的快和穩定,一直是電磁算法的一個瓶頸。
電磁引導的智能車由于不受光線、溫度、濕度的影響,具有很好的環境適應性,相對于光電或攝像頭引導的智能車具有很大的優勢。
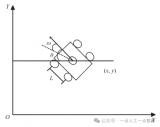
電磁車是通過獲取賽道信號發生器產生的信號來來獲取賽道信息的,在賽道正中間會有一條磁感線,用來產生交變電磁信號。小車通過前瞻上的電感即可獲得到賽道信息,為啥可以電感可以獲取賽道信息呢,其實很好理解,電磁感應都映像吧,導體切割磁感線會產生感應電動勢,工字電感內部的導線切割信號線產生的磁場,在電感引腳就會有感應電動勢。電感距離磁場越近,產生的感應電動勢越大,距離越遠,產生的感應電動勢越小。
電磁智能車的元素的處理方案:環島,坡道,三叉,以及直道和彎道的速度控制方案。
環島:我們對于環島的識別使用的是穩定的電磁判斷方案。內側兩個橫向電感會在環島切點處達到極值,以此來判斷環島。
坡道:我們使用 TFMiniPlus 激光雷達測距來判斷坡道。當距離降到一定閾值下即可判斷坡道。
直道加速:全向組在賽道上勻速循跡很大可能不會有一個較高的速度,所以直道加速就顯得很有必要。我們使用了五種直道加速的判斷條件。
中線判斷加速:判斷圖像上半部分中線與賽道兩邊界無交點即可加速。
電磁智能車的電感排布方案
電感排布方案是制約電磁智能車競賽成績的關鍵因素之一。
我們知道,電感的基本排布分為水平,豎直和八字幾種方案,而電感擺放位置的不同,可能會影響車體循跡的姿態。 通過實測我們發現:水平電感有助于直道循跡,八字電感,則有賽車助于過彎,豎直電感在普通賽道上值幾乎很小,只有在某些特殊元素(如環島)才會突增。 我們采用的是水平和八字電感共同循跡的方式,即在左右兩端分別放上八字和水平電感,在電磁桿的中間和靠近賽車的中心位置各放置一個水平電感,用于特殊元素判斷。 另外,為了更精確的采集賽道電磁值以至于不失真,需將電磁前瞻的高度稍微降低。
模擬舵機是直流伺服電機控制器芯片一般只能接收50Hz頻率(周期20ms) ~300Hz左右的PWM外部控制信號,太高的頻率就無法正常工作了。若PWM外部控制信號為50Hz,則直流伺服電機控制器芯片獲得位置信息的分辨時間就是20ms,比較PWM控制信號正比的電壓與反饋電位器電壓得出差值,該差值經脈寬擴展(占空比改變,改變大小正比于差值)后驅動電機動作,也就是說由于受PWM外部控制信號頻率限制,最快20ms才能對舵機搖臂位置做新的調整。
電磁小車運行原理
1.車模通過感應由賽道中心導線產生的交變磁場進行路徑檢測。
2.要讓小車自己沿著賽道跑就要讓小車能通過傳感器的信號自動的識別當前所處的位置,以及距離賽道中心的大概距離。我們通過制作傳感器來采集模擬信號,然后傳給單片機,然后編程來實現小車位置的判別以及控制小車采取相應動作。
文章綜合CSDN博主「小向是個Der」、古月居、百度文庫、現代的三流魔法使、北京乾勤科技
-
電磁
+關注
關注
15文章
1135瀏覽量
51844 -
模擬信號
+關注
關注
8文章
1131瀏覽量
52478 -
舵機
+關注
關注
17文章
270瀏覽量
41062
發布評論請先 登錄
相關推薦

復雜環境下多無人智能車輛協同調控
20.0-電磁桿的組裝和實物介紹“這個是就是你想要的“-智能車電磁組 電磁循跡小車
20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法

20.2-電磁桿在磁軌道的測試 零基礎入門智能車競賽 STM32電磁小車

vivo智能車載正式上線視頻類應用
什么是智能車間和智能工廠 它們有什么區別
小米之后,做手機的魅族也造車了 搭載FlymeAuto智能車機系統
黑芝麻智能與一汽紅旗達成武當系列C1200家族智能車控項目合作

樂華工位機MES助力智能車間
谷景科普車規級磁棒電感的重要指標
小米SU7智能座艙技術有何優勢?
ROS系統的智能車開發-基于米爾芯馳MYD-JD9X開發板






 工商網監
工商網監
評論