") 電磁智能車原理
電磁智能車原理
電磁智能車原理
隨著計算機、微電子等技術的快速發(fā)展,智能化技術的開發(fā)越來越成熟,應用的范圍也得到了極大的擴展。目前,在企業(yè)生產技術不斷提高、對自動化技術要求不斷加深的環(huán)境下,智能車以及在智能車的基礎上開發(fā)出來的產品已成為自動化物流運輸、柔性生產組織等系統(tǒng)的關鍵設備。世界上許多國家都在積極進行智能車輛的研究和開發(fā)設計,其中如何控制智能車在跑道上跑的更快更穩(wěn)定一直是一個研究的重要課題。
系統(tǒng)總體方案設計
電磁導引小車總體結構如圖2所示,主要由主控模塊、傳感器模塊、底層控制模塊、電源管理模塊和人機交互模塊等幾部分組成。主控模塊以MC9S12XS128單片機為核心控制部件,主要負責完成各種傳感器信息的采集、小車的賽道識別、速度規(guī)劃與運動控制,以及必要的人機交互功能;傳感器模塊主要負責感知外部世界的環(huán)境信息與小車自身的狀態(tài)信息,如利用電磁傳感器獲取賽道信息、干簧管檢測起始線位置、光電編碼器檢測車模速度等;底層控制模塊負責執(zhí)行主控模塊發(fā)出的PWM運動控制指令,實現(xiàn)小車的前進與轉向;電源管理模塊采用7.2 V/2 000 mAh的鎳鎘電池供電,并通過DC-DC穩(wěn)壓轉換模塊向系統(tǒng)中各功能模塊提供所需的電源電壓;人機交互模塊主要包括撥碼開關、LED燈、蜂鳴器、鍵盤、液晶顯示器、SD卡、無線通信模塊和BDM調試模塊等,以方便用戶調試和監(jiān)控。
2軟件系統(tǒng)總體框架
系統(tǒng)軟件如圖3所示,其核心部分主要包括傳感器數(shù)據(jù)獲取、賽道提取、舵機控制、電機控制等。其中賽道提取是軟件設計的重要環(huán)節(jié),其主要任務是根據(jù)電感線圈檢測信號確定當前賽道的類型和車—路關系,為小車的方向控制和速度控制提供依據(jù)。而舵機控制就是指賽車的方向控制,它以賽車車體為參考系,通過小車與賽道中心線的位置偏差來設計增量式PD控制器,以此得到控制舵機的PWM波占空比;舵機驅動車模前輪轉向,使賽車中心線始終逼近電磁導引線。電機控制就是指賽車的速度控制,其期望速度來源于速度規(guī)劃環(huán)節(jié),實際轉速采用光電編碼器檢測,通過設計增量式的PI控制和BANGBANG控制相結合的方法實現(xiàn)對賽車速度的閉環(huán)控制。
3基于分段擬合與動態(tài)加權的賽道位置解算
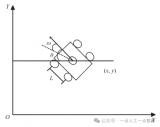
綜合考慮電磁組中的小S彎、大S彎、十字交叉、大回環(huán)、坡道,以及直角彎等各種復雜賽道元素[5],本文提出了一種基于分段擬合與動態(tài)加權的賽道位置解算方法。該方法采用“四橫兩斜”的混合線圈排布方案,具體如圖4所示。圖中,4個水平線圈1~4分別排布在車模前上方左右對稱的-10 cm、-5 cm、5 cm、10 cm處;最外側對稱排布著傾斜角度為45°的線圈5和線圈6;各線圈檢測到的感應電動勢分別用E1、E2、E3、E4、E5、E6表示。
如圖5所示,基于分段擬合與動態(tài)加權的賽道位置解算方法的基本思想為:首先采集6個線圈的感應電動勢(E1~E6)并對其進行比較,當E2或E3最大時,表明小車與賽道的偏離距離d∈[-10 cm,10 cm]區(qū)間,此時將采用四水平線圈檢測的感應電動勢E1~E4進行三次多項式擬合,并通過求極值的方法來解算賽道偏移位置d1;而當E1最大時,表明小車與賽道的偏離距離d∈[-20 cm,-10 cm)區(qū)間,此時將利用感應電動勢E1,通過離線擬合的線性函數(shù)來解算賽道偏移位置d1;同理,當E4最大時,表明小車與賽道的偏離距離d∈(10 cm,20 cm]區(qū)間,此時也將利用感應電動勢E4,通過離線擬合的線性函數(shù)來解算賽道偏移位置d1;與此同時,還要根據(jù)兩側內八字斜電感的感應電動勢E5和E6,利用差值法來解算賽道偏移位置,并將其記為d2;最后將d1與d2加權求和,即可得到最終的賽道偏移位置為:
QQ圖片20161215104923.png
其中,α為權重系數(shù),α∈[0,1]。α的計算公式為:
QQ圖片20161215104927.png
式中,T為閾值,其值需根據(jù)實際制作的車模以及賽道的復雜程度進行確定。為了兼顧直角彎、大回環(huán)等特殊賽道元素,經過反復試驗,本文取T=160。
4實車試驗結果及分析
為了驗證本文工作的有效性,筆者搭建了一臺實驗用電磁小車,并進行了大量的實車測試。
試驗結果表明,當小車在直道上行駛時,由于線圈2和線圈3距離導引線較近,感應電動勢E2+E3大約在170以上,此時主要由三次多項式擬合來解算賽道位置偏差;而當小車在彎道行駛時,由于線圈2和線圈3偏離導引線,偏離程度越大其感應電動勢之和越小,相應地α值越小,此時三次多項式擬合的權重逐漸減小,雙斜電感差值法的權重逐漸加大。由于雙斜電感差值法對彎道的檢測更為敏感,所以增加了轉彎的靈敏性。特別地,當小車行駛至直角彎時,中間兩個線圈的感應電動勢之和連續(xù)遞減,相應地其權重也線性遞減,很好地解決了直角彎的連續(xù)性問題。圖6給出了小車在經過直角彎的過程中,采用未加權求和進行賽道位置解算與采用加權求和進行賽道位置解算的直角彎位置偏差變化對比圖。由圖6可知,采用加權算法求得的直角位置偏差連續(xù)性增強,有效地減弱了由直道進入直角彎的突變性,從而可以利用位置以及位置偏差的變化量判斷出賽道類型,據(jù)此進行速度規(guī)劃和運動控制。另外還可以避免彎道與直角判斷條件的沖突,增強了算法的環(huán)境適應性。
5結論
本文以電磁導引智能車為研究對象,介紹了系統(tǒng)的總體結構和軟件框架。針對復雜賽道元素識別問題,提出了一種基于分段擬合建模與動態(tài)加權融合的賽道位置解算方法。試驗結果表明,該方法具有良好的環(huán)境適應性,以此制作的電磁小車可以針對不同路徑快速穩(wěn)定地運行。
-
電磁智能小車
+關注
關注
0文章
2瀏覽量
1415
發(fā)布評論請先 登錄
相關推薦
ADAYO華陽與華為智能車載光業(yè)務合作簽約
智能車路協(xié)同試驗車開發(fā)服務

復雜環(huán)境下多無人智能車輛協(xié)同調控
智能車載充氣泵方案芯片DSH38M87
20.0-電磁桿的組裝和實物介紹“這個是就是你想要的“-智能車電磁組 電磁循跡小車
20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法

20.2-電磁桿在磁軌道的測試 零基礎入門智能車競賽 STM32電磁小車

vivo智能車載正式上線視頻類應用
什么是智能車間和智能工廠 它們有什么區(qū)別
小米之后,做手機的魅族也造車了 搭載FlymeAuto智能車機系統(tǒng)
黑芝麻智能與一汽紅旗達成武當系列C1200家族智能車控項目合作

樂華工位機MES助力智能車間
ROS系統(tǒng)的智能車開發(fā)-基于米爾芯馳MYD-JD9X開發(fā)板







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論