 飛行時間深度傳感相機的光學設計
飛行時間深度傳感相機的光學設計
光學器件在飛行時間(ToF)深度傳感相機中起著關鍵作用,光學設計決定了最終系統及其性能的復雜性和可行性。3D ToF相機具有某些獨特的特性1這推動了特殊的光學要求。本文介紹了深度傳感光學系統架構(由成像光學組件、接收器上的ToF傳感器和發射器上的照明模塊組成),并討論了如何優化每個子模塊以提高傳感器和系統性能。
介紹
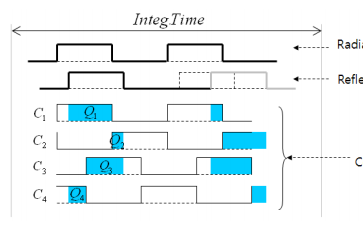
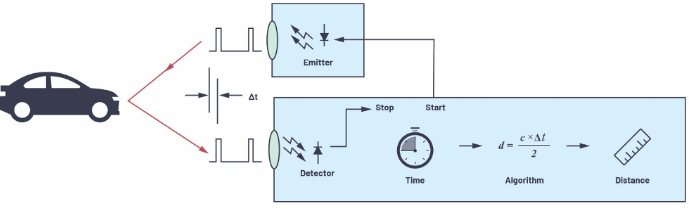
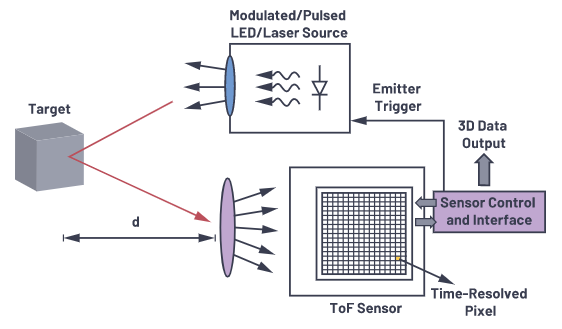
ToF是一種新興的3D傳感和成像技術,在自動駕駛汽車、虛擬和增強現實、特征識別和物體尺寸標注等領域得到了廣泛的應用。ToF相機通過測量光線從光源傳播到場景中的物體并返回像素陣列所需的時間來獲取深度圖像。ADI公司的ADSD3100背照式(BSI)CMOS傳感器采用的特定技術類型稱為連續波(CW)調制,這是一種間接ToF檢測方法。在CW ToF相機中,來自調幅光源的光被相機視場(FOV)中的物體反向散射,并測量發射波形與反射波形之間的相移。通過測量多個調制頻率下的相移,可以計算每個像素的深度值。相移是通過使用像素內光子混合解調測量發射波形與接收波形在不同相對延遲下的相關性而獲得的。2CW ToF的概念如圖1所示。

圖1.ToF技術的概念。
深度傳感光學系統架構
圖2顯示了光學系統架構。它可以分為兩個主要的子模塊類別:成像模塊(也稱為接收器或Rx)和照明模塊(也稱為發射器或Tx)。以下各節將介紹各組件的功能、ToF系統特有的要求以及相應的設計示例。
照明模塊
照明模塊由光源、以高調制頻率驅動光源的驅動器和將光束從光源投射到設計照明場(FOI)的擴散器組成,如圖2所示。

圖2.ToF光學系統架構橫截面的示例。
光源和驅動器
ToF模塊通常使用波長溫度依賴性較低的窄帶光源,包括垂直腔面發射激光器(VCSEL)和邊緣發射激光器(EEL)。發光二極管 (LED) 通常太慢,無法滿足 ToF 調制要求。VCSEL因其較低的成本、外形尺寸和可靠性以及易于集成到ToF模塊中而近年來越來越受歡迎。與EEL(從側面發射)和LED(從側面和頂部發射)相比,VCSEL發射垂直于其表面的光束,從而提供更好的生產良率和更低的制造成本。此外,通過使用具有設計發散和光學輪廓的單個工程擴散器,可以實現所需的FOI。激光驅動器的優化以及印刷電路板(PCB)和光源的電氣設計和布局對于實現高調制對比度和高光功率至關重要。
照明波長(850 nm 與 940 nm)
雖然ToF的工作原理不依賴于波長(而是取決于光速),因此波長不應影響精度,但在某些用例中,波長的選擇會影響系統級性能。以下是選擇波長時的一些注意事項。
傳感器量子效率和響應度:
量子效率(QE)和響應度(R)是相互關聯的。

R測量光電探測器將光功率轉換為電流的能力

其中Q是電子電荷,H是木板常數,c是光速,λ是波長。
通常,硅基傳感器的QE在850 nm處比在940 nm處好約2×或更多。例如,ADI CW ToF傳感器在850 nm處的QE為44%,在940 nm處的QE為27%。對于相同數量的照明光功率,更高的QE和R導致更好的信噪比(SNR),特別是當沒有太多光返回傳感器時(對于遠處或低反射率的物體就是這種情況)。
人類感知
雖然人眼在近紅外 (NIR) 波長范圍內不敏感,但人眼可以感知 850 nm 的光。另一方面,人眼看不到 940 nm。
陽光
盡管光譜可見光區域的太陽輻射最大,但近紅外區域的能量仍然很大。陽光(以及更普遍的環境光)會增加深度噪點并縮小ToF相機的覆蓋范圍。幸運的是,由于大氣吸收,920 nm至960 nm區域的太陽光輻照度有所下降,與850 nm區域相比,太陽輻照度不到一半(見圖3)。在戶外應用中,在 940 nm 處操作 ToF 系統可提供更好的環境光抗擾度,并帶來更好的深度傳感性能。

圖3.近紅外中的太陽光譜輻照度。3
輻射強度(每立體角的光功率)
光源產生恒定的光功率,分布在漫射光學器件產生的FOI內的3D空間中。隨著FOI的增加,每個球面度(sr)的持續能量(即輻射強度[W/sr])降低。了解FOI和輻射強度之間的權衡非常重要,因為它們會影響ToF系統的SNR,從而影響深度范圍。
表 1 列出了 FOI 的幾個示例及其相應的輻射強度歸一化為 60° × 45° FOI 的輻射強度。請注意,輻射強度計算為每個矩形立體角的光功率。
| 箱 | 水平信息自由 | 垂直信息自由 | 歸一化輻射強度 |
| 1 | 204 | 054 | 100% |
| 2 | 124 | 124 | 100% |
| 3 | 204 | 204 | 76% |
| 4 | 324 | 184 | 67% |
| 5 | 384 | 254 | 56% |
照明配置文件規格
為了完全定義照明輪廓,應明確指定幾個特征,包括輪廓形狀、輪廓寬度、光學效率(即特定視場內的封閉能量)和 FOI 外的光功率下降。照明剖面規格通常以角空間中的輻射強度定義。在數學上,它表示為:

其中dΦ是發射到立體角dΩ的功率。FOI需要與成像器的縱橫比相匹配,因此通常是正方形或矩形。
FOI內部的照明輪廓形狀
ToF泛光照明中最常見的輻射強度分布具有蝙蝠翼形狀。他們的個人資料因 cos 而異-n(θ)補償成像鏡頭的下降(即相對照度)。圖 5 展示了蝙蝠翼照明剖面的示例。如果希望從平面目標對成像器的像素陣列實現恒定輻照度,則還應考慮cos3(θ) 目標中心和目標邊緣之間的輻照度 (E) 下降系數 [W/m2],定義為:

其中E是輻照度,dA是光功率dΦ照亮的表面積,R(θ)是圖4中定義的光源到dA的距離,dΩ = dAcos(θ)/R(θ)2.

圖4.輻照度分布與強度的關系。
型材寬度
輪廓的寬度決定了照明輪廓的FOI。它可以定義為全寬半最大或 1/e2的最大強度。為了適應成像鏡頭與成像器之間的錯位和漫射器的公差,FOI通常設計為略大于鏡頭的FOV,以避免暗像素。
輪廓的寬度是光源的強度曲線與擴散器對準直光束的響應的卷積。擴散器的輸入發散角越寬,寬度越寬,過渡斜率越慢。更寬、更慢的過渡斜率會導致更多的能量落在FOI之外,從而導致光功率損耗。可以使用以下兩個要求來指定此類損失的接受標準。
光學效率 — 成像鏡頭視場內的封閉能量
該規范定義了成像模塊將接收多少能量,并由以下人員指定:

圖5c說明了FOV中照明配置文件的2D集成概念。
FOI 外部的光功率下降


圖5.照明配置文件示例。
通常,通過在光源和漫射器之間安裝準直透鏡來減小擴散器的輸入角度,或者通過選擇發散角較小的光源,可以提高光學效率。
成像模塊
成像模塊由成像鏡頭組件、帶通濾光片(BPF)和成像儀上的微透鏡陣列組成。成像儀背面光學堆棧的厚度和材料應針對低背反射進行優化。圖6顯示了成像模塊的圖示。

圖6.成像模塊的圖示。
ToF成像鏡頭設計注意事項
由于ToF相機收集主動照明產生的光,因此像素陣列上光收集的效率和均勻性極大地影響了整體性能。鏡頭需要具有強大的收集力、高透射率和低雜散光。以下是ToF鏡頭的設計注意事項,與傳統RGB相機鏡頭不同。
光收集效率
光收集效率與 1/(f/#) 成正比2,其中 f/# = (焦距)/(光圈大小)。f/#越小,效率越高。小型f/#光學系統有一些權衡。隨著孔徑尺寸的增加,往往會有更多的漸暈和像差,這使得光學器件的設計更具挑戰性。低f/#系統也往往具有較淺的景深。
相對照度 (RI) 和主射線角度 (CRA)
RI 定義為:

傳感器照度下降基于 (cos q)4定律,在無畸變和漸暈鏡頭系統中,其中q是傳感器平面上的CRA入射角。結果是圖像朝向傳感器邊界的相對變暗。通過在透鏡系統中引入負畸變,可以減少輻照度衰減。
傳感器邊緣的最大CRA應根據成像器微透鏡陣列規格進行優化。較小的CRA有助于縮小BPF的帶寬,以實現更好的環境光抗擾度。
以下示例演示了整個場的 CRA 和聚焦光錐尺寸(有效 f/#)如何影響 RI。圖7中示例1的鏡頭系統具有較大的CRA,并且隨著視場角的增加,成像錐逐漸減小(即增加f / #)。相應的折射率隨場角顯著下降,如相應的折射率圖所示。圖 7 中的示例 2 表明,通過最小化 CRA 以及在整個字段中保持統一的 f/#,可以很好地維護 RI。
雜散光
雜散光是系統中任何可能被傳感器檢測到的意外光。雜散光可以來自場內或場外源,通過偶數次反射形成鬼像(例如,鏡頭光暈)。雜散光也可以來自光機械結構和任何散射表面。ToF系統對雜散光特別敏感,因為雜散光的多徑特性為像素貢獻了不同的光程長度,從而導致深度測量不準確。設計過程中需要使用幾種策略來減少雜散光,例如優化增透膜和機械孔徑,使透鏡邊緣和安裝結構變暗,以及定制設計BPF以優化波長和CRA。
以下是一些可能影響系統中雜散光的項目:
暗角
理想情況下,ToF鏡頭系統中不應有任何暗角。暗角會切斷成像光線,有時被用作一種提高圖像質量的技術,同時犧牲外圍場的亮度。然而,截止光線經常在鏡頭系統內反彈,并容易引起雜散光問題。
增透膜
光學元件上的AR鍍膜降低了每個表面的反射率,可以有效減少透鏡反射對深度計算的影響。增透膜應針對光源波長范圍和透鏡表面入射角的角度范圍進行精心設計。
鏡頭元件數量
雖然添加更多的鏡頭元件提供了更大的自由度來實現設計規格和更好的分辨率圖像質量,但它也增加了鏡頭元件不可避免的背反射,并增加了復雜性和成本。
帶通濾波器
BPF 可切斷環境光的貢獻,對于 ToF 系統至關重要。BPF 設計應根據以下參數進行定制,以獲得最佳性能。
(a) 鏡頭參數,如整個視場的f/#和CRA
(b) 光源參數,如帶寬、標稱波長公差和熱偏移
(c) 基板材料對低入射角漂移與波長或低熱漂移與波長的特性
微透鏡陣列
ToF背照式(BSI)傳感器通常具有一層微透鏡陣列,用于將入射到圖像傳感器的光線會聚,并最大化到達像素調制區域的光子數量。微透鏡的幾何形狀經過優化,可在光子轉換為電子的像素區域內實現最高吸收。

圖7.相對照明示例。
在許多鏡頭設計中,鏡頭的CRA隨著圖像高度向傳感器邊緣的增加而增加,如圖8所示。當CRA太大時,這種傾斜入射會導致像素中的吸收損失和相鄰像素之間的串擾。重要的是設計或選擇成像鏡頭,使鏡頭的CRA與其設計的微透鏡陣列的規格相匹配。例如,與ADI ToF傳感器ADSD3100匹配的最佳CRA在傳感器水平和垂直邊緣處約為12°。

圖8.成像鏡頭的最大CRA。
結論
ToF光學器件具有實現最佳性能的獨特要求。本文概述了3D ToF相機的光學架構以及照明和成像子模塊的設計指南,以幫助設計此類光學系統和/或選擇子組件。對于照明子模塊,關鍵因素是功率效率、可靠性以及光源在高調制頻率和高調制對比度下驅動的能力。詳細討論了 850 nm 和 940 nm 之間的波長選擇注意事項,以及如何指定照明配置文件。對于成像子模塊,鏡頭設計考慮因素包括f/#、符合微透鏡規格的CRA和雜散光控制,對于系統級性能至關重要。
審核編輯:郭婷
-
接收器
+關注
關注
14文章
2468瀏覽量
71871 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166386 -
tof傳感器
+關注
關注
2文章
106瀏覽量
14779
發布評論請先 登錄
相關推薦
最受歡迎的三種深度傳感器
TOF飛行時間相機的原理是什么使用方法和應用的詳細資料概述
Terabee具有探測能力的新型間接飛行時間智能傳感器推出
飛行時間傳感器的距離確定方法
利用ToF原理創造了FlightSenseTM技術,推出了飛行時間(ToF)傳感器
用于距離測量和物體檢測的飛行時間系統
用于距離測量和物體檢測的飛行時間系統
飛行時間系統設計的應用概述

飛行時間(TOF)相機的優缺點及其應用領域
用于工業應用的成像傳感器(包括飛行時間、環境光和相機傳感器)

飛行時間傳感器:技術原理與多元應用

多區飛行時間(ToF)傳感器的特點






 工商網監
工商網監
評論