 實現精確而堅固的電機控制傳感系統
實現精確而堅固的電機控制傳感系統
正確驅動電機系統的速度和扭矩需要反饋精度和信號完整性,以響應以在電機動態范圍內提供穩定性。該設計解決方案比較了低邊、高邊和直列式電流檢測,并最終推薦了在線電流檢測電路。直插式是一種堅固的電流檢測電路,可保留交流電機三個支路的相位關系。
介紹
現代電機控制系統需要反饋精度和信號完整性,以正確驅動系統響應(如速度和扭矩),并在電機動態范圍內提供穩定性。
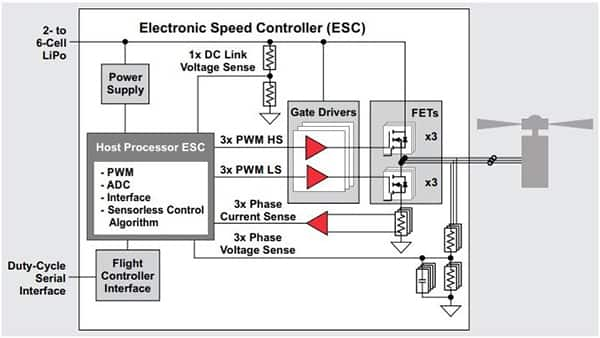
捕獲電機信息時,有三種電機控制測量策略:低邊或高端,或直列(也直接繞組)電流檢測(圖 2)。
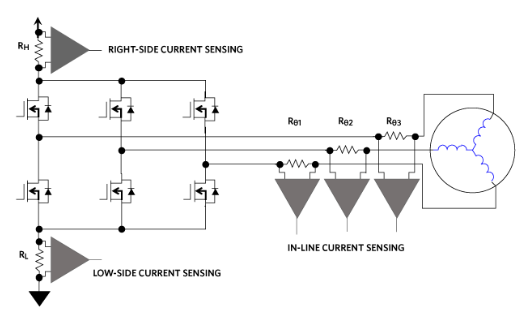
圖2.低邊、高邊和直插式電路選項,用于電機速度和扭矩檢測。
該deisgn解決方案比較了三種電機控制方法,并為可靠的電流檢測電路推薦了合適的電子器件。
低側電機電流傳感器
低成本、低側電流檢測應用使用放大器和檢測電阻(RL),位于柵極驅動 FET 堆棧的底部。低側檢測系統使放大器在靠近地面的地方運行,并連續捕獲每個支路的安培活動。
優點是檢測電阻(RL)和放大器靠近地面,簡化了電路設計。此外,檢測電阻頂部的同相放大器輸入與其高同相端子輸入阻抗的干擾有限。
缺點是,電機支路接地之間的電流檢測電阻會增加不希望的動態壓降并破壞接地路徑。這個增加了電阻,RL,產生可能導致 EMI 噪聲問題的失調電壓。如果負載短路到地,則 RL電阻消除了檢測負載故障的能力。檢測電阻和放大器的組合可捕獲電機反激式和返回電流。除非每個支路都使用檢測電阻和放大器,否則計算繞組電流的唯一方法是使用MCU算法。
高邊電機電流傳感器
直接連接到FET驅動器正電源的高邊電阻可最大限度地減少電阻器對整個系統的動態交流電壓影響。這種配置的侵入性較小,產生的EMI特性最小。此外,高共模抑制比(CMRR)差分放大器可濾除脈寬調制器(PWM)開關噪聲。
高端方法要求電路在FET網絡電源電壓下應對較大的共模信號。這一要求需要一個能夠處理潛在高電壓的可靠放大器。最后,相對濕度的電路位置使得反激式和繞組電流測量變得不可能。
直列電機電流傳感器
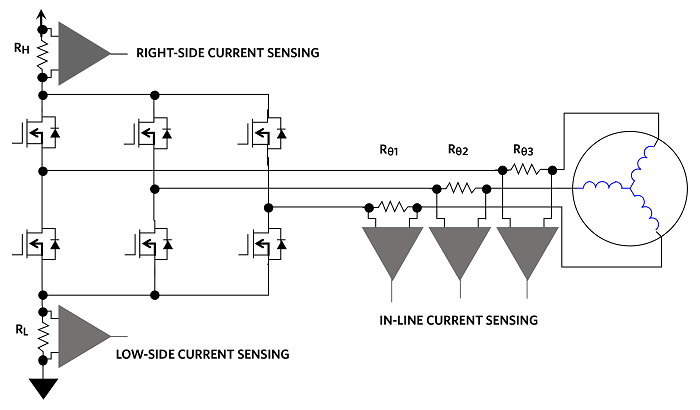
直列(或直接繞組)是首選方法,因為它提供真實的當前相位信息。在直接繞組配置中,系統處理器知道三相電機每相在任何給定時間的電流,從而使電機運行更加高效(圖 3)。
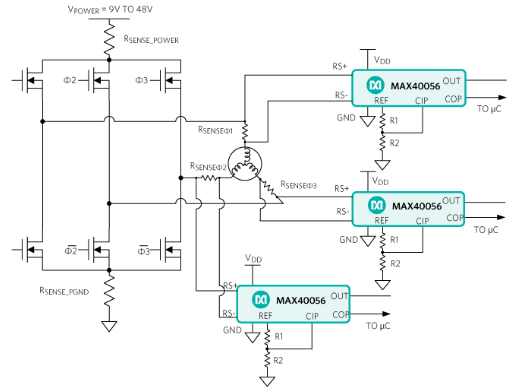
圖3.用于電機控制的在線電流檢測。
在圖3中,MCU同時對所有三個支路進行采樣,以保持每個支路激勵之間的相位關系。
用于在線測量的理想放大器可放大每個電機支路的差分信號,并抑制脈寬調制(PWM)共模瞬變。具有快速建立時間、高帶寬的放大器可以抑制共模瞬變。強大的PWM抑制功能有助于實現最快的建立時間、更高的精度,并使客戶能夠將PWM占空比降至盡可能接近0%。
堅固型電機控制系統的解決方案是使用直插式快速建立時間、高帶寬放大器來抑制共模瞬變。
300kHz MAX40056為雙向電流檢測放大器,在50V、±500V/μs時具有60dB的高交流PWM邊沿抑制(圖4)。
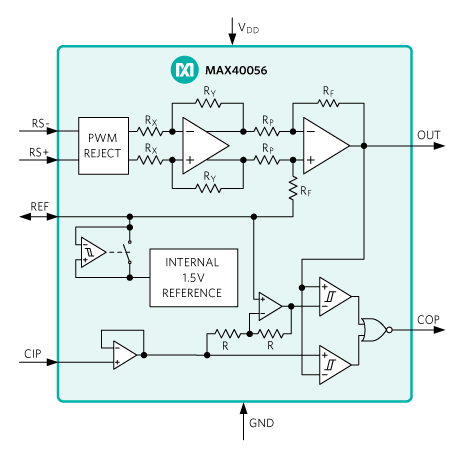
圖4.電流檢測放大器 (CSA) 獲得專利的 PWM 抑制電路。
在圖4中,有多個增益選項:10V/V、20V/V和50V/V。內部基準具有 1% 的雙向偏移。
該器件具有從 500V/μs 和更高的 PWM 邊沿恢復的 500ns PWM 邊沿。輸入共模電壓范圍為-0.1V至+65V,放大器保護范圍為-5V至+70V。MAX40056和競爭基準數據表明PWM共模抗擾度存在顯著差異(圖5)。
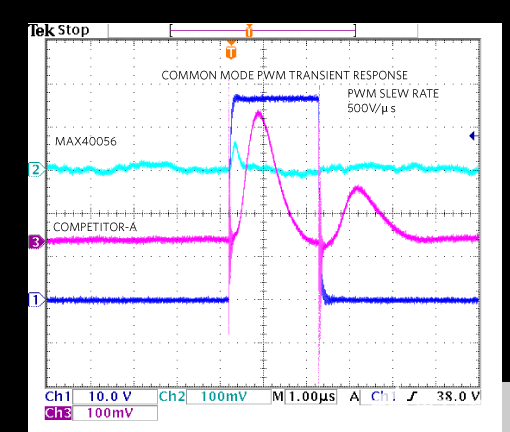
圖5.50V PWM 周期的 PWM 邊沿抑制。
在圖5中,MAX40056 CSA的模擬輸出顯示輕微的凸起,在500ns內恢復,而競爭器件需要大約2μs才能恢復。CSA 獲得專利的 PWM 抑制輸入可抑制瞬態并提供干凈的差分信號測量。
結論
該設計解決方案比較了三種電機控制方法:低側、高端和直插式電流檢測。推薦的電機電流檢測方法是直列式,這是一種強大的電流檢測電路,可保留交流電機三個支路的相位關系。
審核編輯:郭婷
-
電機控制
+關注
關注
3536文章
1880瀏覽量
268884 -
emi
+關注
關注
53文章
3591瀏覽量
127751 -
驅動系統
+關注
關注
3文章
372瀏覽量
26953
發布評論請先 登錄
相關推薦
對BLDC和PMS電機使用無傳感器矢量實現精確運動控制
將無傳感器矢量控制與BLDC和PMS電機結合使用,提供精確運動控制
對電機進行精確控制的常見控制算法及研究方法解析
步進電機控制系統的設計與實現
ADI的電流和角度傳感器實現電機控制系統中的精確相位電流和角度測量
如何實現精確且堅固的電機控制傳感系統





 工商網監
工商網監
評論