 使用MM32F3270基于Azure RTOS信號量的應用
使用MM32F3270基于Azure RTOS信號量的應用
簡 介
Azure RTOS ThreadX 是 Microsoft 提供的高級工業級實時操作系統 (RTOS)。它是專門為深度嵌入式實時 IoT 應用程序設計的。Azure RTOS ThreadX 提供高級計劃、通信、同步、計時器、內存管理和中斷管理功能。此外,Azure RTOS ThreadX 具有許多高級功能,包括 picokernel 體系結構、preemption-threshold 計劃、event-chaining、執行分析、性能指標和系統事件跟蹤。Azure RTOS ThreadX 非常易于使用,適用于要求極其苛刻的嵌入式應用程序。Azure RTOS ThreadX 在各種產品(包括消費者設備、醫療電子設備和工業控制設備)上的部署次數已達數十億次。
具體的介紹和用戶指南可以參考:
https://docs.microsoft.com/zh-cn/azure/rtos/threadx/
在前文描述移植基本內核的基礎上,該應用手冊描述了如何基于MM32F3270系列MCU結合Azure RTOS ThreadX應用Counting Semaphores的使用,引導用戶理解Azure RTOS ThreadX信號量功能。
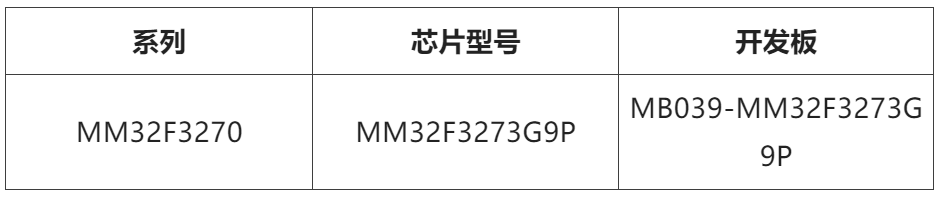
表 1 適用系列型號
| 系列 | 芯片型號 | 開發板 |
| MM32F3270 | MM32F3273G9P | EVB-F3270 |
1移植應用的準備
1.1 硬件開發板的準備
該移植過程中應用的開發板為MM32的EVB-F3270,板載MM32F3273G9P。
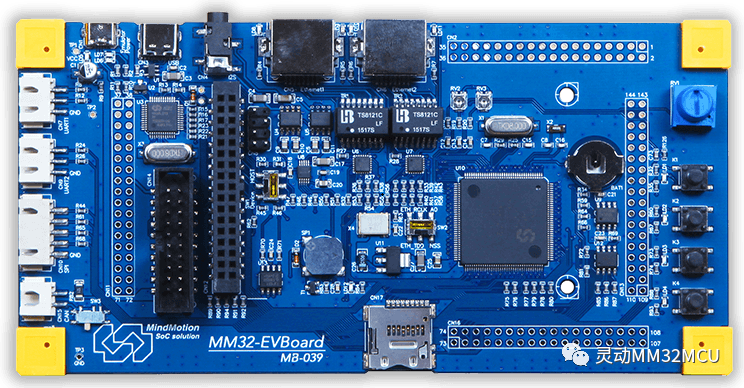
EVB-F3270 (MM32F3273G9P) 的簡要參數:
Arm Cortex-M3 內核
板載 MM32F3273G9P(LQFP144)
4 x Key、4 x LED
I2S Speaker
TF-Card
Ethernet PHY
1.2 軟件的準備
庫函數和例程(Lib Samples)
該移植過程中應用的 Firmware 分別為 MM32F3270 庫函數和例程,下載地址:
https://www.mindmotion.com.cn/products/mm32mcu/mm32f/mm32f_mainstream/mm32f3270/
 ? ?
? ?
Azure RTOS ThreadX(源碼)
ThreadX 的源代碼已經開放,我們可以從 ThreadX 公共源代碼存儲庫獲取 Azure RTOS ThreadX,網址為:
https://github.com/azure-rtos/threadx/
具體的商用使用條件參考Azure的許可證說明:
https://www.microsoft.com/en-us/legal/intellectualproperty/tech-licensing/programs?msclkid=f7ab4ff3afa011ec90a79366a52034fa&activetab=pivot1:primaryr11
Microsoft publishes the Azure RTOS source code to GitHub. No license is required to install and use the software for internal development, testing, and evaluation purposes. A license is required to distribute or sell components and devices unless using Azure RTOS licensed hardware.
Azure RTOS 何時需要許可證?
Microsoft 將 Azure RTOS 源代碼發布到 GitHub。安裝和使用該軟件進行內部開發、測試和評估無需許可證。分發或銷售組件和設備需要許可證,除非使用 Azure RTOS 許可的硬件。
ThreadX 安裝
可以通過將 GitHub 存儲庫克隆到本地計算機來安裝 ThreadX。下面是用于在 PC 上創建 ThreadX 存儲庫的克隆的典型語法。
shell復制
git clone https://github.com/azure-rtos/threadx
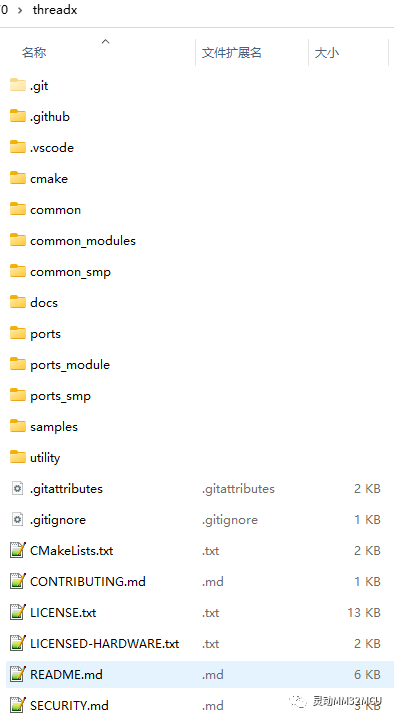
或者,也可以使用 GitHub 主頁上的“下載”按鈕來下載存儲庫的副本。
下載后的倉庫代碼目錄列表如下:
 ? ?
? ?
Azure RTOS ThreadX(源碼)支持的開發環境
ThreadX 內核提供好了各種主流硬件平臺和軟件平臺的移植文件,以Cortex_M3為例,可以支持以下六種開發環境:

本次移植過程使用Azure RTOS原有的sample_threadx.c文件為例,稍作修改,演示信號量的功能與應用。
2Threadx 信號量的應用
該章節介紹信號量的相關知識,演示程序可在MM32F3273G9P的EVB-F3270上運行。
此示例在文件 main_semaphore_demo.c 中實現,旨在說明如何在嵌入式多線程環境中使用信號量,實現任務之間的同步和資源共享機制。
2.1 信號量
2.1.1 統計信號量
ThreadX 提供 32 位計數信號燈,其值范圍在 0 到 4,294,967,295 之間。計數信號燈有兩個操作:tx_semaphore_get 和 tx_semaphore_put 。執行獲取操作會將信號燈數量減一,如果信號燈為 0,獲取操作不會成功。獲取操作的逆操作是放置操作,該操作會將信號燈數量加一。
每個計數信號燈都是一個公用資源,ThreadX 對如何使用計數信號燈沒有任何限制。
計數信號燈通常用于互相排斥,也可將計數信號燈用作事件通知的方法。
2.1.2 互相排斥
互相排斥用于控制線程對某些應用程序區域(也稱為關鍵部分或應用程序資源)的訪問 。將信號燈用于互相排斥時,信號燈的“當前計數”表示允許訪問的線程總數。在大多數情況下,用于互相排斥的計數信號燈的初始值為 1,這意味著每次只有一個線程可以訪問關聯的資源。只有 0 或 1 值的計數信號燈通常稱為二進制信號燈。
如果使用二進制信號燈,用戶必須阻止同一個線程對其已擁有的信號燈執行獲取操作。第二個獲取操作將失敗,并且可能導致調用線程無限期掛起和資源永久不可用。
2.1.3 事件通知
還可以采用生成者-使用者的方式,將計數信號燈用作事件通知。使用者嘗試獲取計數信號燈,而生成者則在有可用的信息時增加信號燈。此類信號燈的初始值通常為 0,此值不會在生成者為使用者準備好信息之前增加。用于事件通知的信號燈也可能從使用 tx_semaphore_ceiling_put 服務調用中獲益。此服務確保信號燈計數值永遠不會超過調用中提供的值。
2.1.4 創建計數信號燈
計數信號燈由應用程序線程在初始化期間或運行時創建。信號燈的初始計數在創建過程中指定。應用程序中計數信號燈的數量沒有限制。
2.1.5 線程掛起
嘗試對當前計數為 0 的信號燈執行獲取操作時,應用程序線程可能會掛起。
執行放置操作后,才會執行掛起線程的獲取操作并恢復該線程。如果同一計數信號燈上掛起多個線程,這些線程將按照掛起的順序 (FIFO) 恢復。
不過,如果應用程序在取消線程掛起的信號燈放置調用之前調用 tx_semaphore_prioritize,還可以恢復優先級。信號燈設置優先級服務將優先級最高的線程放于掛起列表的前面,同時讓所有其他掛起的線程采用相同的 FIFO 順序。
2.1.6 信號燈放置通知
某些應用程序可能會發現,在放置信號燈時收到通知十分有利。ThreadX 通過 tx_semaphore_put_notify 服務提供此功能。此服務將提供的應用程序通知函數注冊到指定的信號燈。只要放置了信號燈,ThreadX 就會調用此應用程序通知函數。應用程序通知函數內的確切處理由應用程序決定;但這通常包括恢復相應的線程以處理新信號燈放置事件。
2.1.7 運行時信號燈性能信息
ThreadX 提供可選的運行時信號燈性能信息。如果 ThreadX 庫和應用程序是在定義 TX_SEMAPHORE_ENABLE_PERFORMANCE_INFO 的情況下生成的,ThreadX 會累積以下信息。
整個系統的總數:
信號燈放置數
信號燈獲取數
信號燈獲取掛起數
信號燈獲取超時數
每個信號燈的總數:
信號燈放置數
信號燈獲取數
信號燈獲取掛起數
信號燈獲取超時數
此信息在運行時通過tx_semaphore_performance_info_get和 tx_semaphore_performance_system_info_get 服務提供。信號燈性能信息在確定應用程序是否正常運行時非常有用。此信息對于優化應用程序也很有用。例如,“信號燈獲取超時數”相對較高可能表明其他線程占用資源的時間太長。
2.2 Azure Threadx 信號量的相關函數
tx_semaphore_create 創建計數信號燈
UINTtx_semaphore_create( TX_SEMAPHORE*semaphore_ptr, CHAR*name_ptr, ULONGinitial_count);
函數說明
此服務創建用于線程間同步的計數信號燈。初始信號燈計數指定為輸入參數。
參數
semaphore_ptr:指向信號燈控制塊的指針。
name_ptr:指向信號燈名稱的指針。
initial_count:指定此信號燈的初始計數。合法值的范圍為 0x00000000 至 0xFFFFFFFF。
返回值
TX_SUCCESS:(0X00) 成功創建信號燈。
TX_SEMAPHORE_ERROR:(0x0C) 信號燈指針無效。指針為 NULL 或已創建信號燈。
NX_CALLER_ERROR:(0x13) 此服務的調用方無效。
示例
TX_SEMAPHOREmy_semaphore; UINTstatus; /*Createacountingsemaphorewhoseinitialvalueis1. Thisistypicallythetechniqueusedtomakeabinary semaphore.Binarysemaphoresareusedtoprovide protectionoveracommonresource.*/ status=tx_semaphore_create(&my_semaphore, "my_semaphore_name",1); /*IfstatusequalsTX_SUCCESS,my_semaphoreisreadyfor use.*/
另請參閱
tx_semaphore_ceiling_put
tx_semaphore_delete
tx_semaphore_get
tx_semaphore_info_get
tx_semaphore_performance_info_get
tx_semaphore_performance_system_info_get
tx_semaphore_prioritize
tx_semaphore_put
tx_semaphore_put_notify
具體函數的中文說明可以參考:
https://docs.microsoft.com/zh-cn/azure/rtos/threadx/chapter4
具體函數的英文說明可以參考:
https://docs.microsoft.com/en-us/azure/rtos/threadx/threadx-smp/chapter4
2.3 信號量的應用演示
2.3.1 工程目錄的建立
打開目標工程文件夾“MM32F3270Project”:
移除原有樣例.c 文件sample_threadx.c:
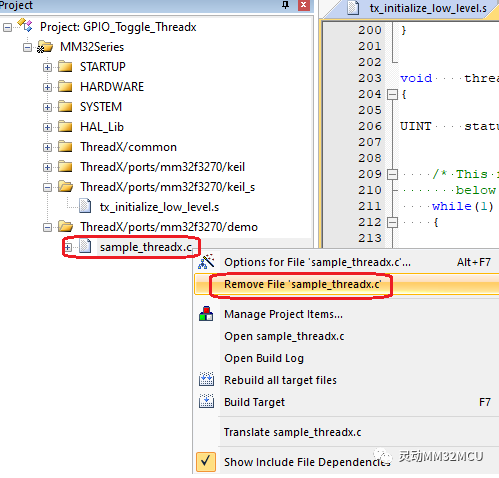
參考sample_threadx.c建立main_semaphore_demo.c文件,并添加hardware目錄中的led.c、key.c到工程項目中。
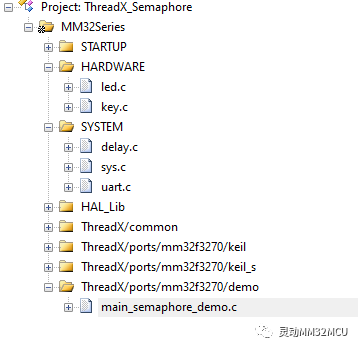
注意:
需要在delay.c中配置USE_SYSTICK_DELAY 為 0。
#define USE_SYSTICK_DELAY 0
3Threadx 的信號量應用
創建如下幾個任務:
LED1閃爍指示當前系統運行。
K2鍵按下,發送信號量同步信號。
任務接收到消息后,串口打印。
3.1 代碼實現
下載調試默認會運行到main()函數,如下為全部實現的代碼。
Demo演示代碼
/*Thisisasmalldemoofthehigh-performanceThreadXkernel.Itincludesexamplesofsix threadsofdifferentpriorities,usingamessagequeue,semaphore,andaneventflagsgroup.*/ #include"tx_api.h" #include"delay.h" #include"led.h" #include"key.h" #include"uart.h" #defineDEMO_STACK_SIZE1024 #defineTHREAD0_PRIORITY1 #defineTHREAD0_PREEMPTION_THRESHOLD1 #defineTHREAD1_PRIORITY2 #defineTHREAD1_PREEMPTION_THRESHOLD2 #defineTHREAD5_PRIORITY4 #defineTHREAD5_PREEMPTION_THRESHOLD4 //#defineTHREAD5_PREEMPTION_THRESHOLD_NEW0 /*DefinetheThreadXobjectcontrolblocks...*/ TX_THREADthread_0; TX_THREADthread_1; TX_THREADthread_5; TX_SEMAPHORESemaphore; /*Definethecountersusedinthedemoapplication...*/ ULONGthread_0_counter; ULONGthread_1_counter; ULONGthread_5_counter; /*Definethethreadstacks.*/ UCHARthread_0_stack[DEMO_STACK_SIZE]; UCHARthread_1_stack[DEMO_STACK_SIZE]; UCHARthread_5_stack[DEMO_STACK_SIZE]; /*Definethreadprototypes.*/ voidthread_0_entry(ULONGthread_input); voidthread_1_entry(ULONGthread_input); voidthread_5_entry(ULONGthread_input); volatileunsignedintbootloop; /*Definemainentrypoint.*/ intmain() { DELAY_Init();//cannotusesystick LED_Init(); KEY_Init(); CONSOLE_Init(115200); printf("!!!Start!!! "); /*EntertheThreadXkernel.*/ tx_kernel_enter(); } /*Definewhattheinitialsystemlookslike.*/ voidtx_application_define(void*first_unused_memory) { /*Createthread0.*/ tx_thread_create( &thread_0, "thread0", thread_0_entry, 0, thread_0_stack, DEMO_STACK_SIZE, THREAD0_PRIORITY, THREAD0_PREEMPTION_THRESHOLD, TX_NO_TIME_SLICE, TX_AUTO_START); /*Createthread1.*/ tx_thread_create( &thread_1, "thread1", thread_1_entry, 0, thread_1_stack, DEMO_STACK_SIZE, THREAD1_PRIORITY, THREAD1_PREEMPTION_THRESHOLD, TX_NO_TIME_SLICE, TX_AUTO_START); /*Createthread5.*/ tx_thread_create( &thread_5, "thread5", thread_5_entry, 5, thread_5_stack, DEMO_STACK_SIZE, THREAD5_PRIORITY, THREAD5_PREEMPTION_THRESHOLD, TX_NO_TIME_SLICE, TX_AUTO_START); /*Createasemaphoreforsignalsynchronization*/ tx_semaphore_create(&Semaphore,"Semaphore",0); } /*Definethetestthreads.*/ voidthread_0_entry(ULONGthread_input) { /*ThisthreadsimplycontrolsLEDflashingtoindicatethatthesystemisrunning*/ while(1) { /*Incrementthethreadcounter.*/ thread_0_counter++; LED1_TOGGLE(); /*Sleepfor200ticks.*/ tx_thread_sleep(200); } } voidthread_1_entry(ULONGthread_input) { UINTstatus; /*Thisthreadsimplysuccessfullyreceivesthesemaphoreandstartstoprintinformation*/ while(1) { /*Incrementthethreadcounter.*/ thread_1_counter++; status=tx_semaphore_get(&Semaphore,TX_WAIT_FOREVER); if(status==TX_SUCCESS) { /*Receivethesemaphore*/ printf("Synchronizationsemaphorereceived "); } } } voidthread_5_entry(ULONGthread_input) { UCHARt=0; /*Thisthreadsimplyscanbuttonispressedtosendthesemaphore.*/ while(1) { /*Incrementthethreadcounter.*/ thread_5_counter++; t=KEY_Scan(0); if(KEY1_PRES==t) { LED1_TOGGLE(); } elseif(KEY2_PRES==t){ LED2_TOGGLE(); /*K2ispressedtosendasemaphore*/ tx_semaphore_put(&Semaphore); } elseif(KEY3_PRES==t){ LED3_TOGGLE(); } elseif(KEY4_PRES==t){ LED4_TOGGLE(); } else{ tx_thread_sleep(10); } } }
3.2 下載與調試
運行程序,板載LED1閃爍。觀察串口調試助手,按下K2鍵,串口打印信息:
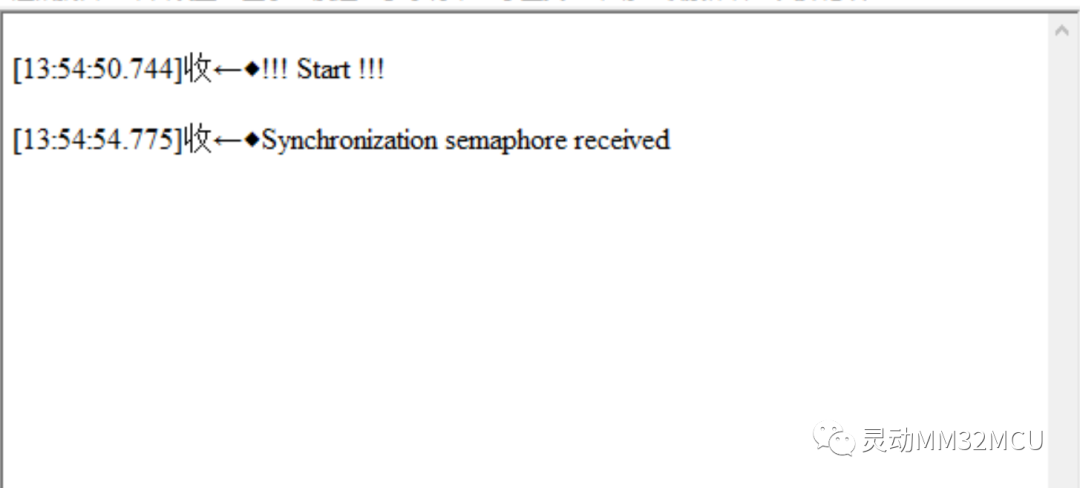
創建信號量初始值為 0,用于信號同步。任務5執行按鍵掃描,當K2按下時通過tx_semaphore_put發送信號量,對計數值執行加1操作。任務1通過tx_semaphore_get用于信號量接收,對計數值執行減1操作,實際運行情況是K2鍵每按下一次,串口打印一條信息,Demo演示成功。
4小結
Azure RTOS 使用信號量能夠方便地實現任務之間的同步和資源共享機制,結合MM32F3270的強大性能,可以實現Azure RTOS廣泛的應用場景。
審核編輯:湯梓紅
-
mcu
+關注
關注
146文章
17123瀏覽量
350983 -
RTOS
+關注
關注
22文章
811瀏覽量
119593 -
開發板
+關注
關注
25文章
5032瀏覽量
97371 -
信號量
+關注
關注
0文章
53瀏覽量
8331 -
Azure
+關注
關注
1文章
123瀏覽量
12778
原文標題:靈動微課堂 (第240講)|使用MM32F3270基于Azure RTOS信號量的應用
文章出處:【微信號:MindMotion-MMCU,微信公眾號:靈動MM32MCU】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MM32F3270系列32位MCU的特點有哪些
使用MM32F3270基于Azure RTOS定時器組的應用
靈動微電子MM32F3270系列MCU的特點介紹
基于MM32F3270 以太網 Client使用







 工商網監
工商網監
評論