 藍牙遙控履帶底盤行駛
藍牙遙控履帶底盤行駛
1. 功能描述
本文提供的示例所實現的功能為:用手機APP遙控斜三角履帶底盤樣機實現移動,包括前進、停止、后退、原地左轉、原地右轉。
在這個示例中,采用了以下硬件,請大家參考:
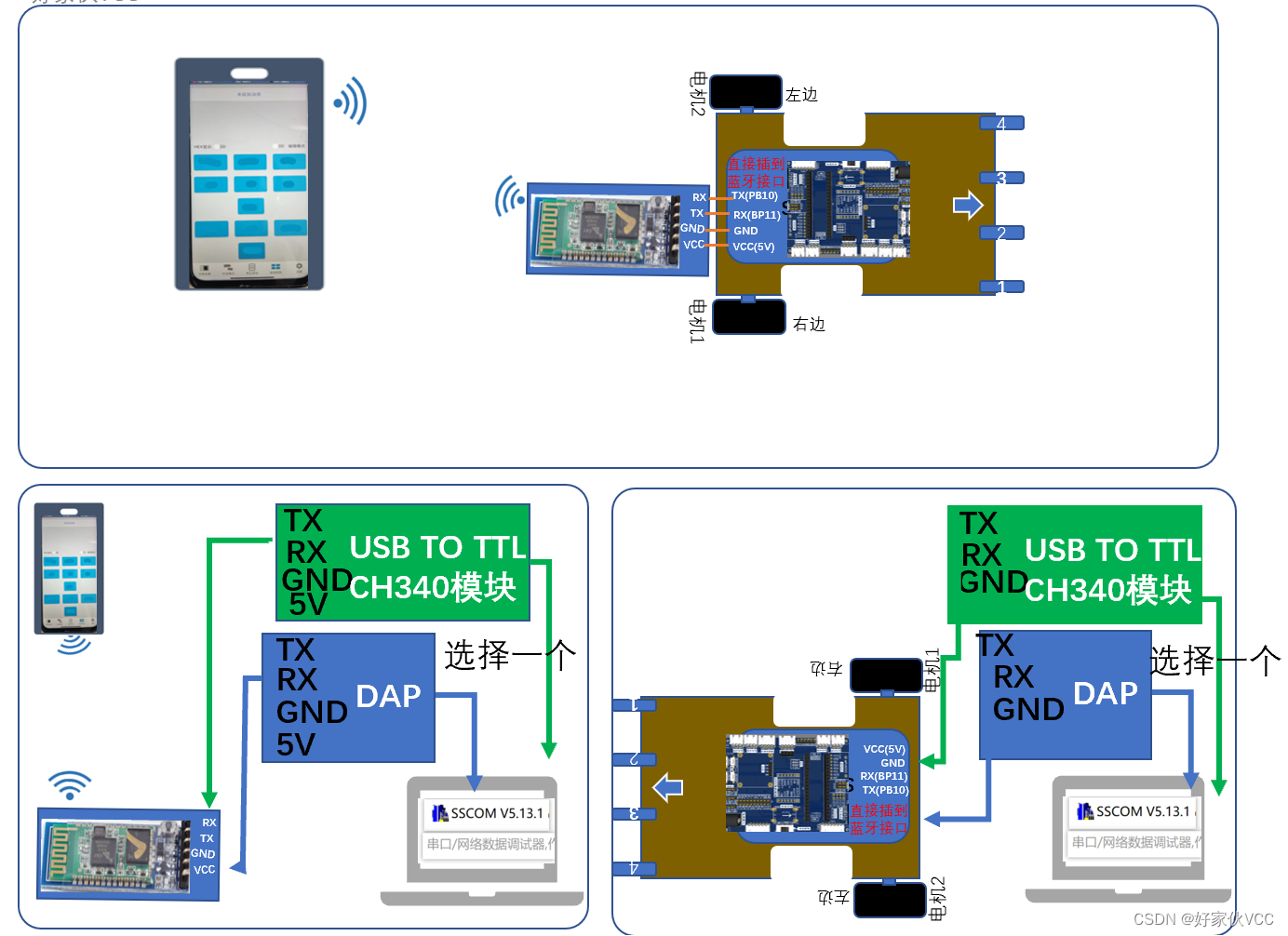
Basra主控板(兼容Arduino Uno)、Bigfish2.1擴展板、7.4V鋰電池、藍牙串口模塊
為斜三角履帶底盤樣機安裝藍牙串口模塊,斜三角履帶底盤樣機有兩種擺放方式:

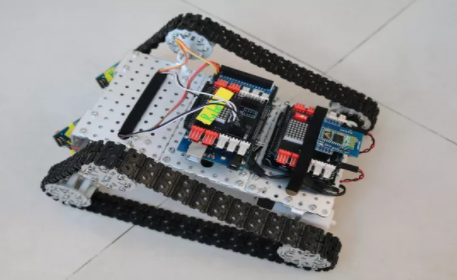
車身右側為安裝了藍牙串口模塊的主控板,左側控制板請忽略
3. 示例程序
編程環境:Arduino 1.8.19
程序通過使用if語句來判斷讀取到的串口的不同字符值來匹配不同的動作,從而實現對機器人的遠程控制。
接收到“1”的時候,執行前進;
接收到“2”的時候,執行后退;
接收到“3”的時候,執行左轉;
接收到“4”的時候,執行右轉;
接收到“5”的時候,執行停止;
手機APP的鍵值按上述規則進行配置,然后單片機接收到不同的信息,對應執行不同的動作。
例程代碼(robot_ble_control.ino)如下:
|
/*------------------------------------------------------------------------------------ 版權說明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2022-9-28 https://www.robotway.com/ ------------------------------ 實功能: 從串口(藍牙)接收字符,根據不同字符分別做出前進、后退、停止、原地左轉、原地右轉的動作。 ----------------------------------------------------- 實驗接線: 左輪:D9,D10 右輪:D5,D6。 ------------------------------------------------------------------------------------*/ int _ABVAR_1_Bluetooth_data = 0 ; void Left(); void Stop(); void Right(); void Back(); void Forward(); void setup() { Serial.begin(9600); pinMode( 5 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 9 , OUTPUT); pinMode( 10 , OUTPUT); } void loop() { _ABVAR_1_Bluetooth_data = Serial.parseInt() ; if (( ( _ABVAR_1_Bluetooth_data ) > ( 0 ) )) { if (( ( _ABVAR_1_Bluetooth_data ) == ( 1 ) )) { Forward(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 2 ) )) { Back(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 3 ) )) { Left(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 4 ) )) { Right(); } if (( ( _ABVAR_1_Bluetooth_data ) == ( 5 ) )) { Stop(); } } } void Right() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } void Back() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , LOW ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Left() { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , LOW ); } void Forward() { digitalWrite( 5 , LOW ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , LOW ); digitalWrite( 10 , HIGH ); } void Stop() { digitalWrite( 5 , HIGH ); digitalWrite( 6 , HIGH ); digitalWrite( 9 , HIGH ); digitalWrite( 10 , HIGH ); } |
審核編輯 黃昊宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
藍牙
+關注
關注
114文章
5809瀏覽量
170193
發布評論請先 登錄
相關推薦
OM6621E 低功耗BLE5.1協議Soc芯片 藍牙語音遙控器原理應用
藍牙語音遙控器的原理是利用藍牙技術實現無線通信和語意識別技術實現語音控制。藍牙語音遙控器由兩部分組成,一個是
發表于 12-20 11:18
一文了解底盤域控之制動功能
1底盤域控基礎1.1底盤域控的概念1.2線控底盤技術1)線控制動系統2)線控轉向系統2制動系統功能2.1制動系統原理2.2制動系統的發展歷史2.3電子穩定系統ESP2.4線控制動系統--EHB1
智能底盤持續發展,底盤域MCU的國產機會
電子發燒友網報道(文/梁浩斌)智能汽車時代,自動駕駛、智能座艙是感知最強的體驗升級。但對于汽車來說,底盤決定了乘坐舒適度和車輛動態,甚至關系到行駛安全,底盤永遠是汽車不可忽視的部分。而伴隨整車電子

小米汽車發布智能底盤預研技術,展現極致操控性能
技術的發布,不僅展示了小米汽車在智能底盤領域的深厚積累,更預示了其未來在自動駕駛和智能操控方面的巨大潛力。小米全主動懸架能夠根據路況和行駛需求,實時調整懸架狀態,確保車輛行駛的穩定性和舒適性。而小米超級四電機系統則提
線控底盤,自動駕駛時代的基石?
線控底盤(X-by-wire)作為自動駕駛技術的核心支撐技術,正逐步改變著汽車工業的技術框架和市場格局。本文深入探討了線控底盤的定義及其在自動駕駛中的關鍵作用,分析了當前技術的現狀及其面臨的挑戰,并
藍牙語音遙控器方案
在智能家居的時代,科技正在改變我們的生活方式。藍牙語音遙控器,作為智能家居的關鍵組成部分,正在重新定義用戶與設備之間的互動方式。用戶對著藍牙語音遙控器,只要輕說一句話就可以搞定很多復雜

AW30N藍牙語音芯片
杰理藍牙BLE+語音一體化芯片AW30N系列,支持BLE、玩具類、小音箱類產品和通用MCU類應用二次開發。AW30N系列芯片:AW302A、AW305A、AW306A,應用行業:藍牙遙控玩具、語音識別產品、語音
探討底盤的發展歷程及趨勢
自汽車誕生一百余年以來,底盤發展就和汽車發展深度綁定。底盤系統決定了汽車縱向、橫向和垂向六個自由度的動態行為,是汽車能夠跑運行的必要條件。
發表于 04-11 10:13
?640次閱讀
自制一輛遙控悍馬
小時進行設計、3D打印原型、發現問題,然后重復這個過程,但每次我都能學到一些東西。
底盤中最具挑戰性的部分是轉向機構。
我花費了大量時間研究轉向是如何工作的,以及如何讓它應用于我的小型遙控車上。同樣,我經歷
發表于 03-19 16:02
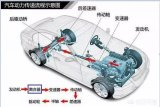
汽車底盤構造之傳動系統詳解
底盤作用是支承、安裝汽車發動機及其各部件、總成,形成汽車的整體造型,并接受發動機的動力,使汽車產生運動,保證正常行駛。底盤由傳動系、行駛系、轉向系和制動系四部分組成。
發表于 03-12 11:32
?801次閱讀

基于國民技術N32WB031的藍牙語音遙控器解決方案
N32WB031系列藍牙芯片是國民技術新一代高性能、超低功耗的藍牙5.1芯片,具有豐富的外設接口,在工業/能源、金融/消費、醫療、家電及汽車等行業領域用途非常廣泛。本文介紹的藍牙語音遙控

汽車底盤構造名稱圖解
底盤作用是支承、安裝汽車發動機及其各部件、總成,形成汽車的整體造型,并接受發動機的動力,使汽車產生運動,保證正常行駛。底盤由傳動系、行駛系、轉向系和制動系四部分組成。
發表于 01-17 11:28
?1080次閱讀





 工商網監
工商網監
評論