 圖達通的激光雷達產品工作原理及應用優勢
圖達通的激光雷達產品工作原理及應用優勢
激光雷達是市面上爭議很大的一個傳感器,擺在最前面的一個爭議就在使用它的必要性上。
堅定的激光雷達派,以Waymo為領頭羊的L4路線目前遇到了很大的阻礙,從L2開始演進的特斯拉,雖然Autopilot進步不達預期,但是確實是鐵桿的反激光雷達派。而用上激光雷達的量產車型,雖然有奧迪和奔馳,但是我們并沒有看到整體的效果有太大的起色。
中國的新勢力汽車在智能化的道路上一貫是走在了世界的前列。今年,蔚來汽車的ET7,小鵬G9和理想L9車上,分別用上了具有代表性三家激光雷達企業的產品:圖達通(Innovusion)、速騰和禾賽,確實是值得我們觀察的。
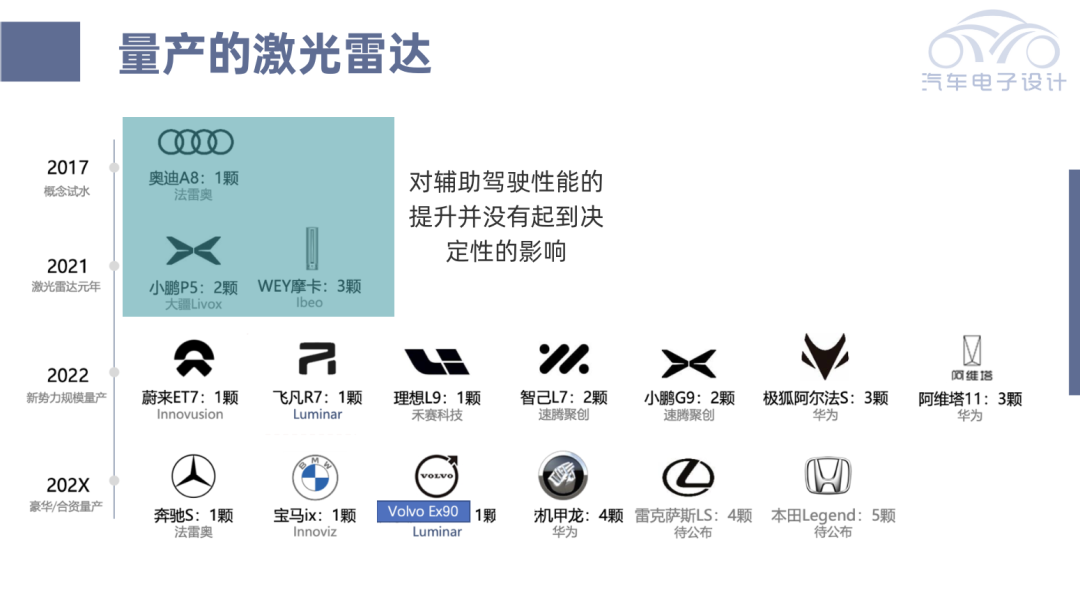
▲圖1.激光雷達市場一直存在使用的價值問題
從激光雷達的點云分割創造三維立體圖像,分辨度精準度高;在讀取物體信息(包括探測距離/角度分辨率等)方面優勢突出,且無需依賴深度算法——這是目前所有除了特斯拉以外,所有面向開發L3以上的智能輔助駕駛都會采用的解決方案。

▲圖2.不同產品的特性比較
Part 1
圖達通產品工作原理
圖達通年度媒體沙龍剛結束,正好聊聊用在蔚來汽車上的這個量產產品。
激光雷達由四個基礎組成部分:激光發射器、掃描器、接收器以及處理設備組成。
圖達通在這里的解決方案是,分別采用了 1550nm 光纖激光器、轉鏡+振鏡方案、APD 雪崩二極管以及 FPGA 處理器。轉鏡+振鏡二維掃描方案,1550nm激光發射器的采用使其激光雷達能夠以更大功率掃描更遠的范圍,可以實現最遠500米的探測距離,10%反射率下250米的探測距離,最高分辨率0.06°*0.06°,水平視場角達到120°。
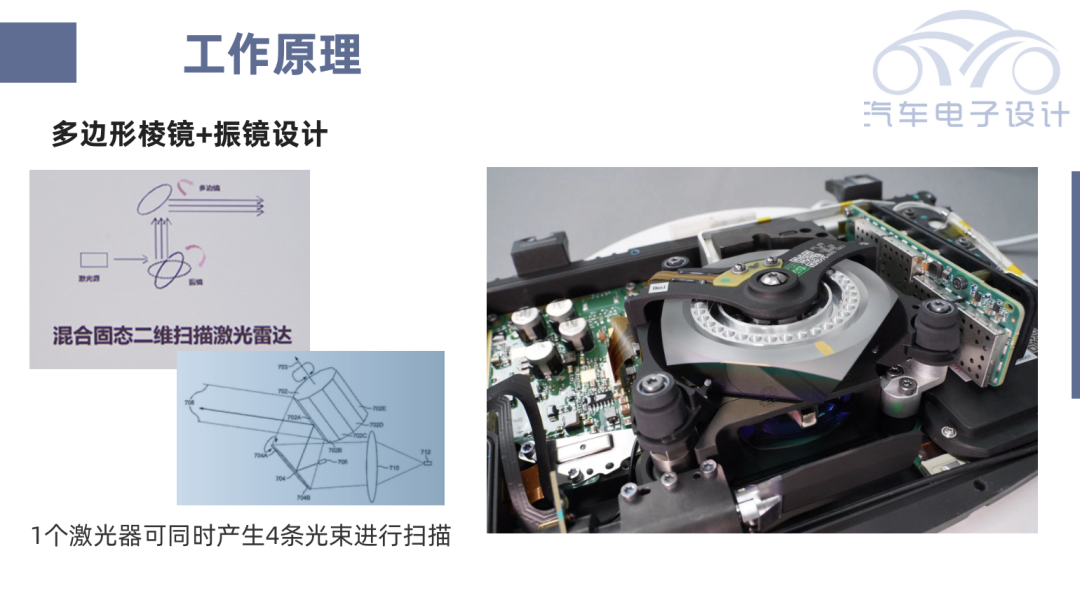
▲圖3. 圖達通產品的設計
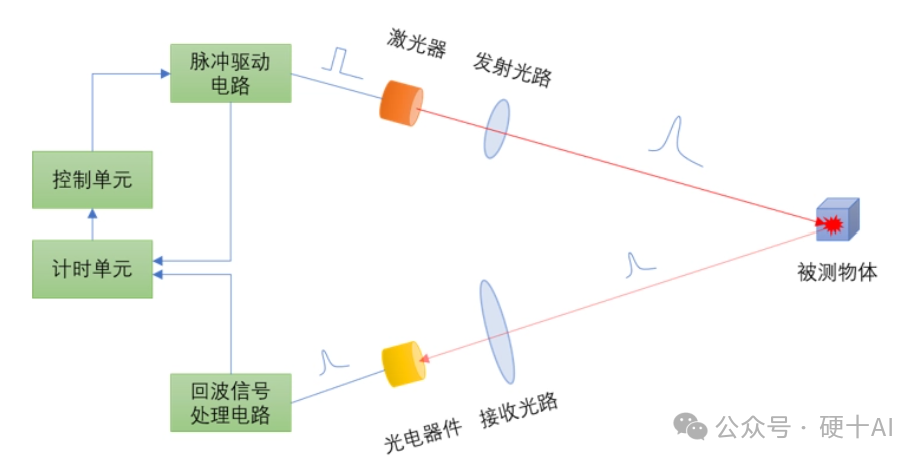
在這款產品中,轉鏡負責水平掃描,振鏡負責垂直掃描。激光光束從光源射出后打在振鏡上,反射到轉鏡之后到外界,再從被測物體處原路返回到接收光路中,并且被處理電路獲取。如果把多個光源呈現略微不同的角度,同時向振鏡發光,實現多線掃描。光纖是采用了一分四的方法,四路同時進行掃描。
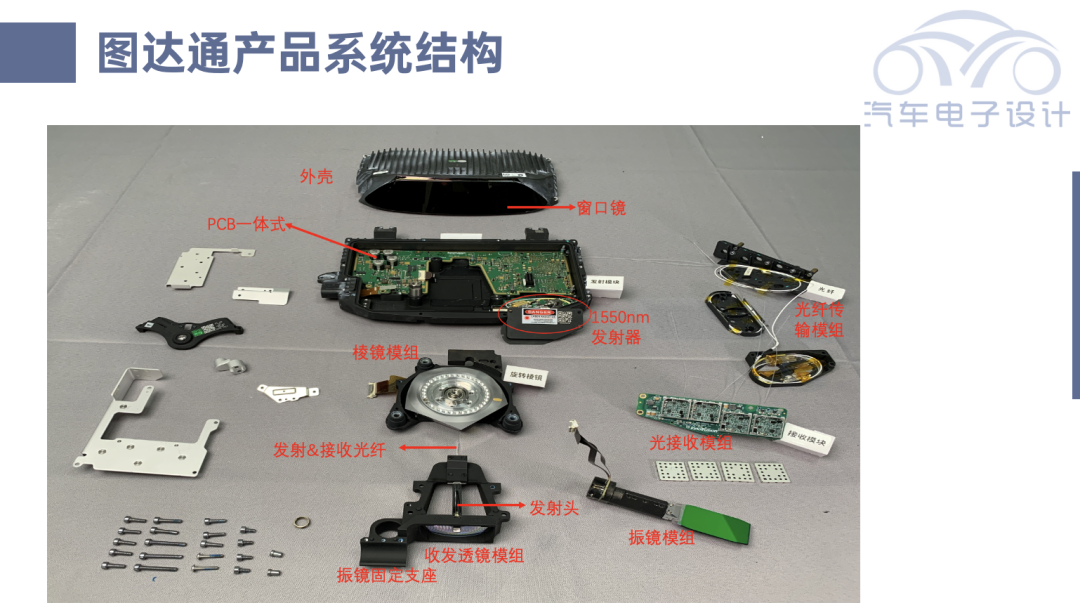
▲圖4. 圖達通激光雷達整體結構的分析
下圖我們看到整個光纖發射器,通過一分四的模式(1根紅色的發送,4根藍色是接收)
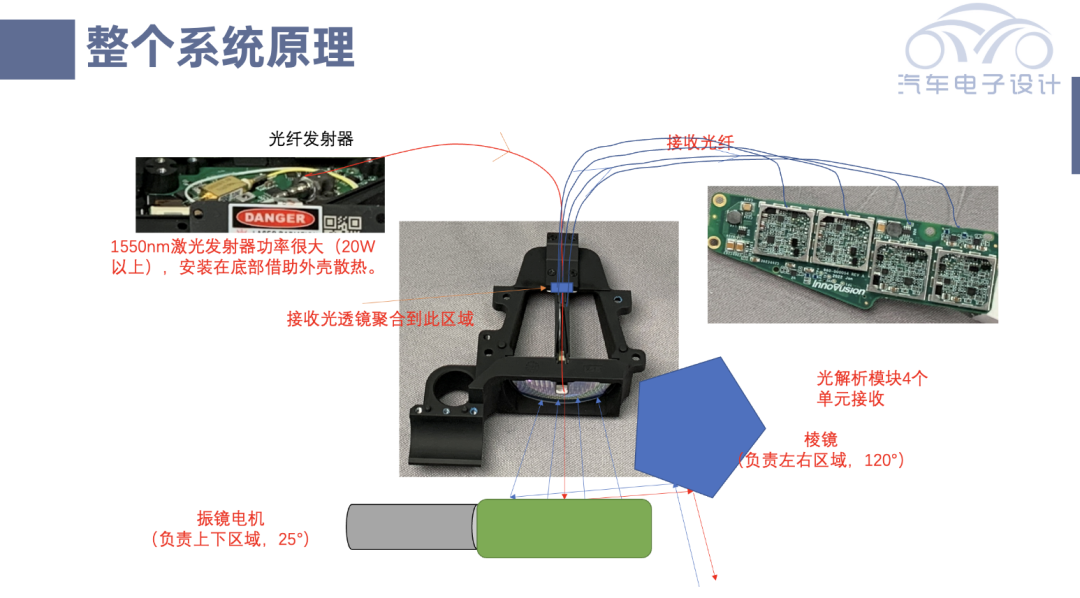
▲圖5. 整個工作原理
1550 路線的激光器一般只需要一個光纖激光器 ,圖達通 Talcon 采用 1分4 設計,1個激光器可同時產生4條光束進行掃描。光纖激光器內包括了泵浦光源和種子光源,由于1550nm激光發射器功率比較大,從位置來看,安裝在底部借助鋁合金外殼散熱。

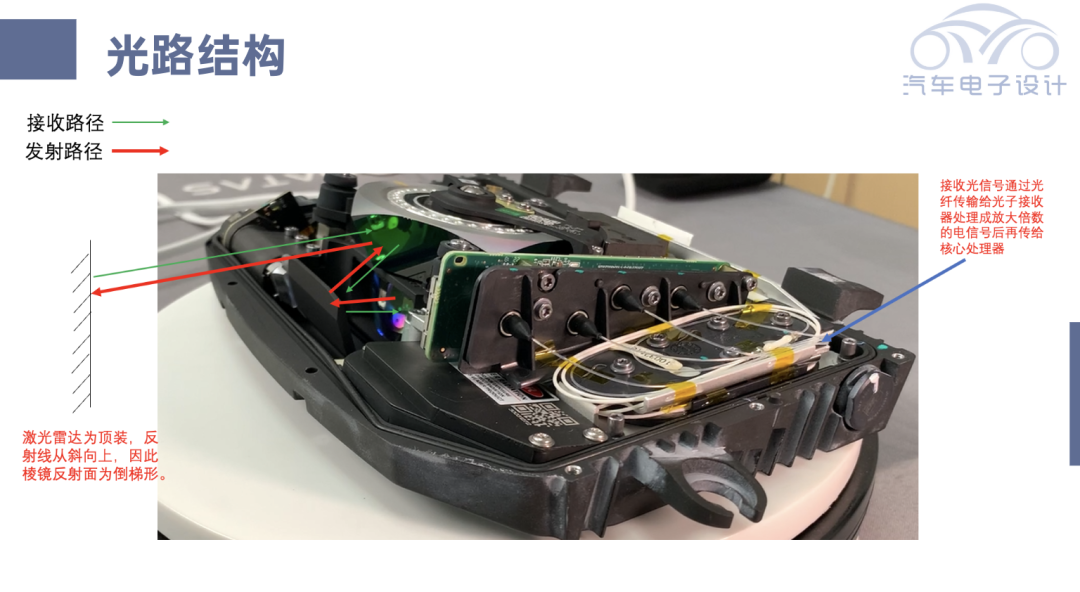
▲圖6. 光路收發模塊
激光雷達為頂裝,反射線從斜向上,因此棱鏡反射面為倒梯形,在這里4路返回的光纖接口對應4路APD(接收穩定、可靠性最好)進行處理,接收光信號通過光纖傳輸給光子接收器處理成放大倍數的電信號后再傳給核心處理器。
▲圖7. 整個模塊的概覽
從系統成本來看,光路結構、APD和光纖成本較高,整個電路部分的成本控制得比較好。

▲圖8. 電路結構
Part 2
圖達通的優勢
從應用層面來看,我覺得圍繞整個前方視野探測中,這款激光雷達屬于預警和掃盲的作用。 100米處的拋灑物都對于人眼識別來說很有挑戰,通過可探測到100米之外20*40cm大小的拋灑物且點云清晰(5-6個點),比如道路前方的20cm的輪胎,通過可行駛區域的點云輸出來給自動駕駛域控制器進行預警。
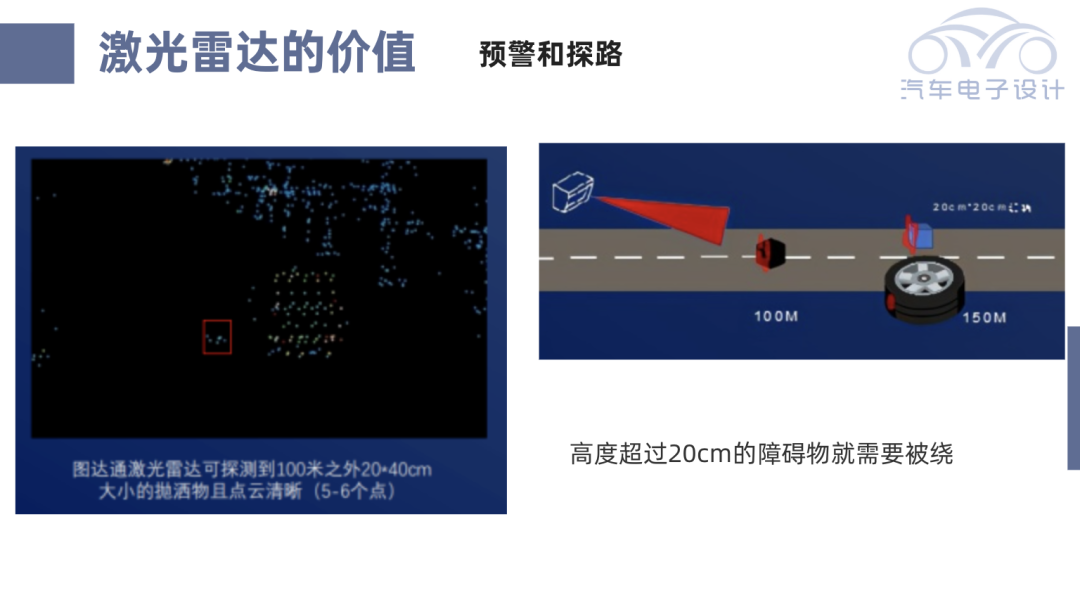
▲圖9. 激光雷達的價值
圖達通的激光雷達掃描采用二維掃描模式,中間高密度區域為ROI 區域,點云密度是非ROI 區域的6 倍左右。通過域控下發指令給LiDAR,ROI 區域可以在整個FOV 內實現實時動態調整,在大曲率轉彎以及遠距離小目標的檢測跟蹤等方面有重要意義。
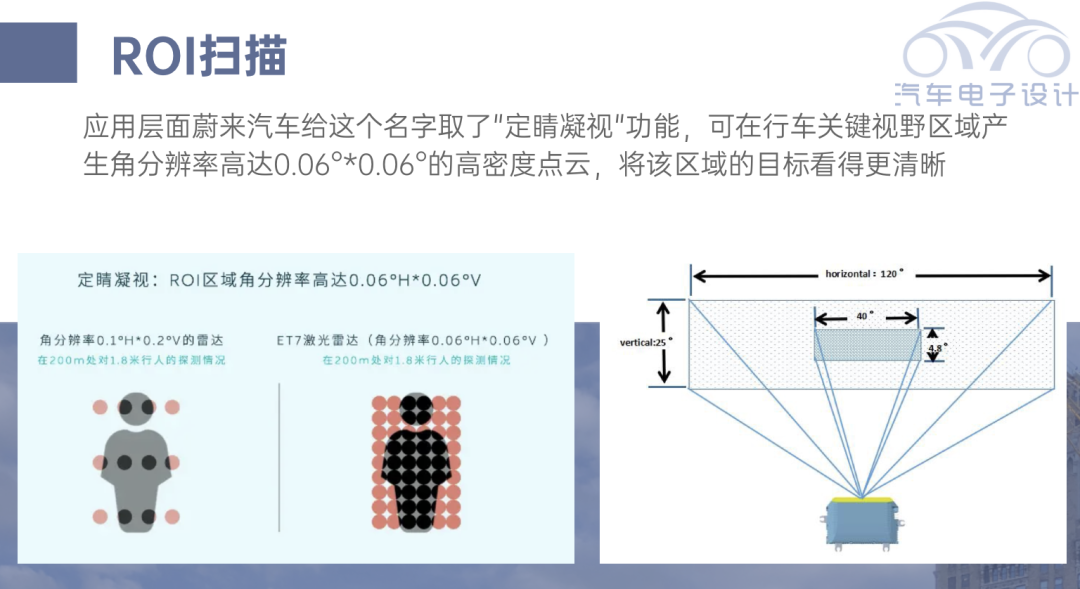
▲圖10.設計的目標和效果
小結:不管是1萬塊的激光雷達還是4000塊的激光雷達,價格是不是值,在早期不那么重要,更多是一種技術探索。從長期角度來看,在激光雷達部署以后,自動輔助駕駛在感知、規劃層面到底能做成啥樣,值得我們持續觀察。
審核編輯:郭婷
-
傳感器
+關注
關注
2551文章
51163瀏覽量
754133 -
接收器
+關注
關注
14文章
2472瀏覽量
71946 -
激光雷達
+關注
關注
968文章
3981瀏覽量
190009
原文標題:智能駕駛|圖達通的激光雷達
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AI驅動的人形機器人,成為激光雷達產業的下一個爆發點
激光雷達,明年要降價至200美元

激光雷達企業圖達通與宇稱電子攜手合作,打造車規級ASIC芯片

激光雷達的工作原理和分類
商用激光雷達產品InnovizOne有什么獨特之處
森思泰克發布兩款全新激光雷達產品
森思泰克全新推出96線激光雷達和192線激光雷達產品

激光雷達選型秘訣,五大要素助您輕松決策

洛微科技亮相2024激光雷達產業技術峰會
洛微科技引領硅光FMCW芯片技術革新,推動激光雷達產業發展

針對激光雷達,Seyond圖達通與英偉達達成合作
激光雷達產業迎來黃金發展期,2024年出貨量預計達150萬顆,同比增長160%
激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論