") Level2層VCU架構(gòu)的功能安全設(shè)計(jì)
Level2層VCU架構(gòu)的功能安全設(shè)計(jì)
隨著軟件定義汽車的趨勢日益加強(qiáng),道路車輛電子電器系統(tǒng)滿足功能安全已經(jīng)成為基本要求。近期,在歐盟車輛型式批準(zhǔn)(typeapproval依據(jù)部分UNECE法規(guī))和我國車輛的CCC認(rèn)證中,對采用電子控制的轉(zhuǎn)向、制動、動力電池管理系統(tǒng)等也引入了功能安全要求。高效的軟件架構(gòu)設(shè)計(jì)顯然對功能安全的實(shí)施和落地起著引導(dǎo)性作用,所以電子電器系統(tǒng)滿足功能安全要求已經(jīng)成為產(chǎn)品基本屬性。
針對軟件架構(gòu)如何滿足功能安全要求,業(yè)內(nèi)人士紛紛借鑒了E-Gas架構(gòu),E-Gas最先被應(yīng)用于發(fā)動機(jī)控制器EMS,由Level1功能層、Level2功能監(jiān)控層、Level3控制器監(jiān)控層三部分組成。國內(nèi)相關(guān)論文分別將E-Gas架構(gòu)應(yīng)用于各個(gè)控制功能中,其中專利、文獻(xiàn)、文獻(xiàn)、文獻(xiàn)、文獻(xiàn)都針對功能安全標(biāo)準(zhǔn)設(shè)計(jì)了整車控制器硬件和軟件,但并未涉及Level2軟件架構(gòu)。
因此,為了彌補(bǔ)E-Gas架構(gòu)未明確提出基于模型開發(fā)MBD的Level2軟件架構(gòu)的缺陷,且架構(gòu)設(shè)計(jì)要滿足高內(nèi)聚低耦合、合適的分層等功能安全要求,本文針對整車控制器VCU設(shè)計(jì)了一種Level2功能監(jiān)控層軟件架構(gòu),不但符合功能安全架構(gòu)設(shè)計(jì)要求,而且可應(yīng)用于其他ECU功能安全Level2設(shè)計(jì)中,有助于功能安全設(shè)計(jì)進(jìn)一步落地,降低實(shí)施難度。
一、VCU模型整體架構(gòu)
設(shè)計(jì)整車控制器VCU模型Level1、Level2架構(gòu),如圖1所示,包括時(shí)序調(diào)度、輸入信號、Level1、Level2和輸出信號模塊,需滿足功能安全可理解性、一致性、簡單性、可驗(yàn)證性、模塊化、抽象化、封裝性、可維修性等架構(gòu)設(shè)計(jì)原則和要求。
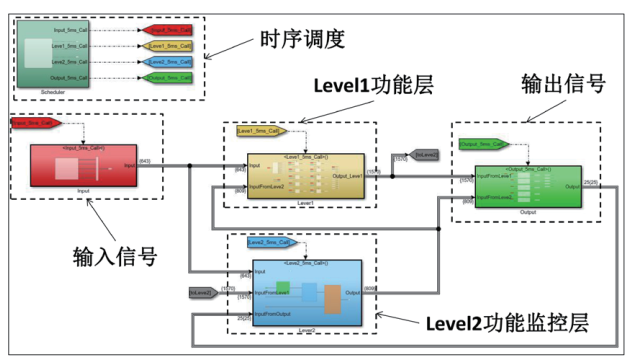
圖1 VCU控制模型架構(gòu)
Level1被稱為功能層,包含整車控制基本功能,如電機(jī)扭矩需求、能量回收等,整車高低壓電源管理,如高壓安全、低壓管理等,以及在檢測到故障時(shí)控制系統(tǒng)的反應(yīng)。Level2被稱為功能監(jiān)控層,檢測Level1功能軟件的缺陷過程。例如,通過監(jiān)測計(jì)算的需求扭矩值或車輛縱向加速度,當(dāng)系統(tǒng)發(fā)生故障時(shí),會觸發(fā)系統(tǒng)反應(yīng),進(jìn)入安全狀態(tài)。Level1和Level2獨(dú)立的開發(fā)和各自生產(chǎn)代碼要運(yùn)行到不同的分區(qū)內(nèi),避免共因失效和免于干擾,并且Level2監(jiān)控層代碼要運(yùn)行到硬件安全核內(nèi)。
二、Level1功能層軟件架構(gòu)
設(shè)計(jì)VCU模型Level1功能層架構(gòu),如圖2所示,Level1進(jìn)行ECU基本功能實(shí)現(xiàn)和應(yīng)用時(shí),ECU的基礎(chǔ)功能必須存在,包括時(shí)序調(diào)度、輸入信號匯總、輸出信號匯總、控制功能模塊(如整車運(yùn)行狀態(tài)控制、扭矩控制、能量管理、診斷處理、加速踏板控制、擋位控制、續(xù)駛里程、低壓電源控制、儀表顯示控制等模塊),各模型庫均采用模型應(yīng)用(ModelRefercence)方法引用,方便各模塊庫維護(hù)、復(fù)用或移植。
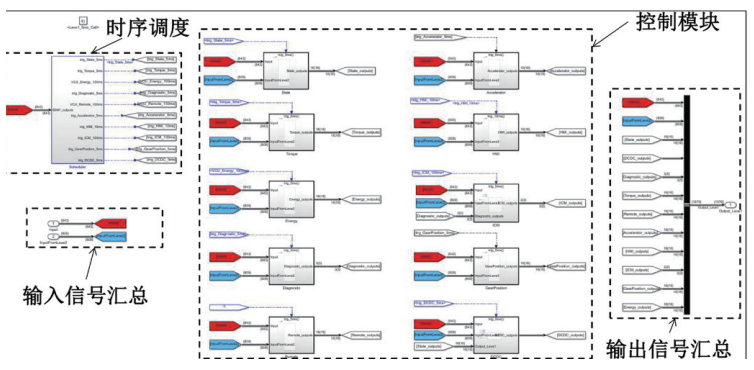
圖2 VCU控制模型Level1功能層架
三、Level2功能監(jiān)控層架構(gòu)
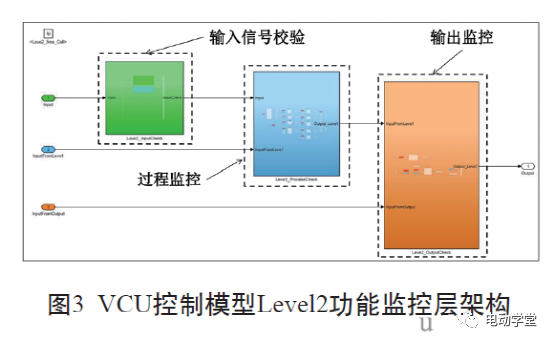
VCU模型Level2功能監(jiān)控架構(gòu),如圖3所示,包括信號校驗(yàn)、Level2過程監(jiān)控、輸出監(jiān)控三個(gè)模塊,其作用是對ECU的Level1功能層中實(shí)現(xiàn)的設(shè)計(jì)功能安全相關(guān)模塊進(jìn)行監(jiān)控,屬于監(jiān)控模塊,增加該模塊可以滿足功能安全要求,可以對功能安全進(jìn)行如下分解:Level1功能安全等級為QM(X),Level2功能安全等級為X(X),其中X可以根據(jù)具體功能分為ASILA/B/C/D。
1.Level2信號校驗(yàn)軟件架構(gòu)
(1)輸入輸出接口
信號校驗(yàn)?zāi)K輸入輸出接口,如表1所示。

表1 Level2信號校驗(yàn)?zāi)K接口
(2)安全機(jī)制
Level2輸入模塊對相應(yīng)的安全相關(guān)的信號進(jìn)行完整性、有效范圍、合理性等校驗(yàn),然后分別輸出給Level1和Level2過程監(jiān)控和輸出監(jiān)控用,具體校驗(yàn)機(jī)制和時(shí)序圖,如圖4所示。
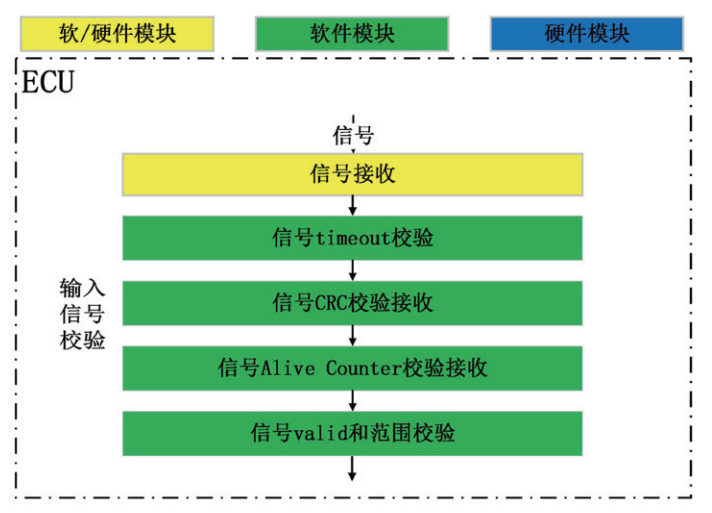
圖4 信號校驗(yàn)?zāi)K架
假設(shè)每隔TBDms接收接口1信號,首先對信號進(jìn)行timeout超時(shí)檢測,當(dāng)超過TBD信號周期內(nèi)沒有接收到,判定信號丟失;然后進(jìn)行CRC檢測,當(dāng)校驗(yàn)沒有通過時(shí),判定這幀信號CRC錯(cuò)誤;再進(jìn)行alivecounter檢測,當(dāng)校驗(yàn)沒有通過時(shí),判定信號alivecounter錯(cuò)誤;最后進(jìn)行valid和范圍檢測,當(dāng)校驗(yàn)沒有通過時(shí),判定信號為invalid;檢測到以上任意錯(cuò)誤時(shí),發(fā)送接口3為無效且發(fā)送接口2為默認(rèn)值或上一周期信號給其他模塊。
2.Level2過程監(jiān)控軟件架構(gòu)
(1)輸入輸出接口
Level2過程監(jiān)控模塊輸入輸出接口,如表2所示。
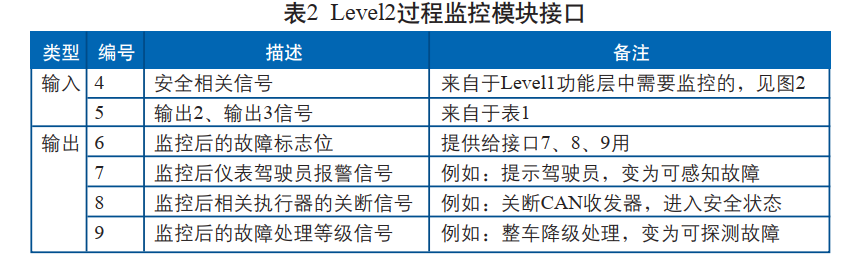
(2)安全機(jī)制
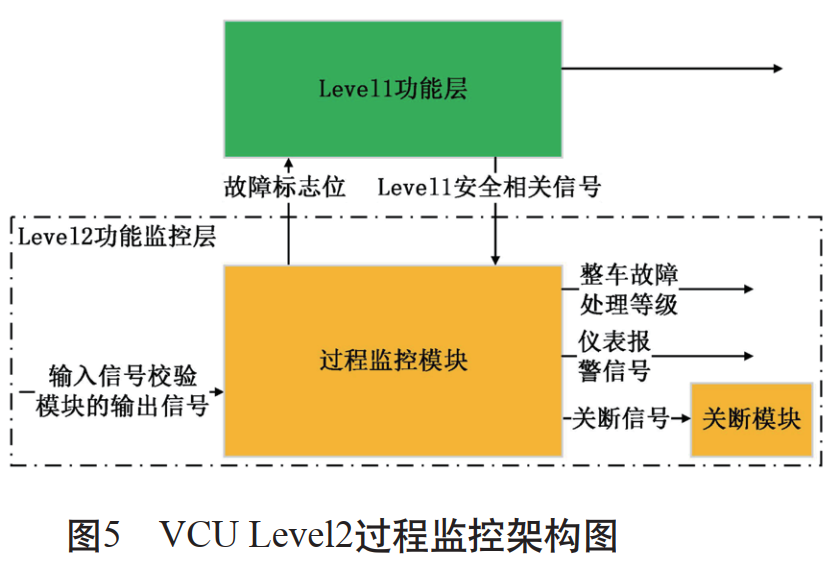
根據(jù)Level1功能層中安全相關(guān)功能,其安全信號輸出作為Level2監(jiān)控層的輸入,由Level2監(jiān)控層對Level1進(jìn)行監(jiān)控,架構(gòu)圖如圖5所示:無論Level1功能層如何,被監(jiān)控的功能應(yīng)在Level2監(jiān)控層中采取冗余異構(gòu)算法對接口4進(jìn)行校驗(yàn),并在出現(xiàn)錯(cuò)誤或異常時(shí)觸發(fā)系統(tǒng)反應(yīng),將其帶入可控狀態(tài),即輸出接口6、接口7、接口8、接口9。
3.Level2輸出監(jiān)控軟件架構(gòu)
(1)輸入輸出接口
Level2輸出監(jiān)控模塊輸入輸出接口,如表3所示。
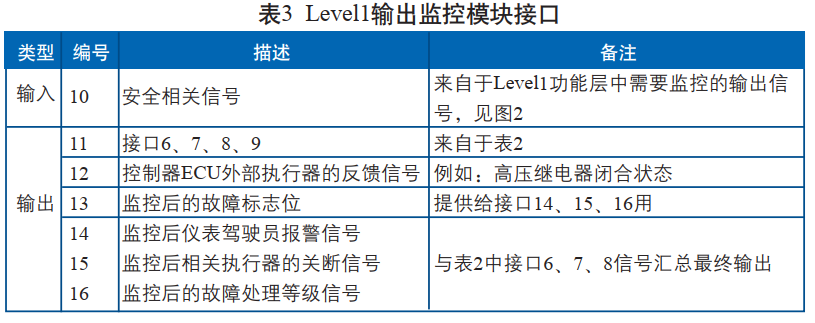
(2)安全機(jī)制
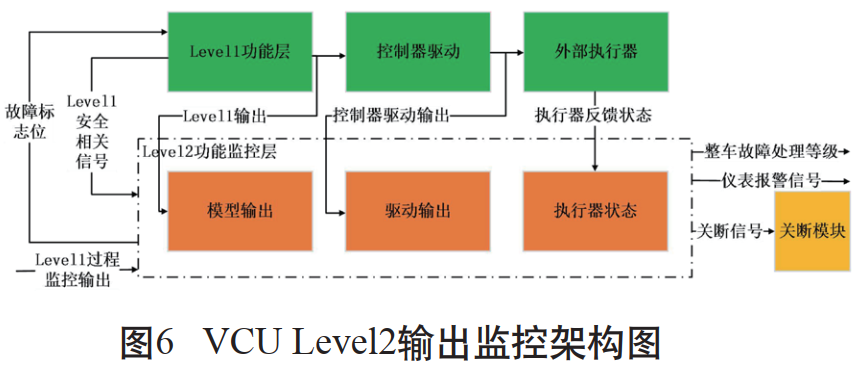
Level2對level1的最終的輸出結(jié)果、CAN收發(fā)器或硬線驅(qū)動輸出,以及執(zhí)行器最終的執(zhí)行情況進(jìn)行閉環(huán)實(shí)時(shí)監(jiān)控,架構(gòu)圖如圖6所示,具體策略分為三個(gè)層次,一是模型輸出信號監(jiān)控:Level2采用獨(dú)立于Level1控制策略對接口10進(jìn)行監(jiān)控,避免邏輯錯(cuò)誤或輸出未連線;二是驅(qū)動輸出監(jiān)控:接口10輸出給輸出驅(qū)動,Level2需Debounce一定時(shí)間后監(jiān)控驅(qū)動是否正確輸出;三是執(zhí)行器監(jiān)控:執(zhí)行器響應(yīng)接口11信號后,執(zhí)行動作并反饋接口12,Level2監(jiān)控其執(zhí)行狀態(tài)是否滿足預(yù)期結(jié)果,以上若出現(xiàn)一個(gè)或多個(gè)監(jiān)控故障,則需通過接口14發(fā)送儀表提醒駕駛員,且通過接口15或16使系統(tǒng)進(jìn)入安全狀態(tài)。
四、分析和測試驗(yàn)證
通過在軟件架構(gòu)級別應(yīng)用安全分析(FMEA和FTA)和DFA相關(guān)失效分析,找出失效原因(Fault),以及分析失效影響(Effect)。結(jié)果表明Level2軟件架構(gòu)提供監(jiān)控功能、行為和ASIL等級滿足設(shè)計(jì)要求。
利用靜態(tài)測試工具M(jìn)ODELINSPECTOR選擇功能安全標(biāo)準(zhǔn)和MAB標(biāo)準(zhǔn)進(jìn)行模型集成靜態(tài)語句掃描、語義分析、識別軟件行為,無需人工設(shè)計(jì)測試用例,無需運(yùn)行代碼的自動分析過程,直至結(jié)果表明滿足功能安全架構(gòu)設(shè)計(jì)要求;利用動態(tài)測試工具M(jìn)ODELVERIFIER,針對Level2模型要素之間特有的集成層次和接口進(jìn)行測試,人工設(shè)計(jì)“打樁”代碼,在原始碼中植入“檢測代碼”,需要人工設(shè)計(jì)測試用例,運(yùn)行代碼或測試用例,獲取軟件運(yùn)行過程產(chǎn)生的數(shù)據(jù),對數(shù)據(jù)進(jìn)行安全分析迭代修正,直至測試結(jié)果表明集成的軟件組件滿足其功能安全軟件架構(gòu)設(shè)計(jì)需求。
審核編輯:湯梓紅
-
VCU
+關(guān)注
關(guān)注
17文章
80瀏覽量
20547 -
整車控制器
+關(guān)注
關(guān)注
3文章
47瀏覽量
6341 -
功能安全
+關(guān)注
關(guān)注
2文章
87瀏覽量
5650
原文標(biāo)題:Level2層VCU架構(gòu)的功能安全設(shè)計(jì)
文章出處:【微信號:談思實(shí)驗(yàn)室,微信公眾號:談思實(shí)驗(yàn)室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
談?wù)勅绾卧O(shè)計(jì)MCU程序3層架構(gòu)
STM32F405的RDP字節(jié)寫成LEVEL2鎖定后還可以解鎖
如何采用FPGA來實(shí)現(xiàn)UTOPIA LEVEL2主接口的發(fā)送和接收模塊?
榮小菜補(bǔ)鈣記第28期: 簡易程序架構(gòu)之Top Level設(shè)計(jì)
VCU功能測試需求
自動駕駛線控底盤VCU功能介紹
請問如何使用i.mt rx 1170 LPCG domain control register LEVEL fields?
UTOPIA LEVEL2接口時(shí)序分析及FPGA實(shí)現(xiàn)
VCU信號的類型和VCU信號的應(yīng)用

嚴(yán)重依賴Level2功能的Autopilot很危險(xiǎn) 但確切的風(fēng)險(xiǎn)很難量化
淺談?wù)嚳刂破?b class='flag-5'>VCU的下線功能檢測
域架構(gòu)下的功能安全思考
javaweb三層架構(gòu)和mvc架構(gòu)
從0到1實(shí)現(xiàn)VCU:新能源汽車整車控制器

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論