") 采用AI算法的嵌入式傳感器平臺(tái)—從大數(shù)據(jù)到智能數(shù)據(jù)的本地
采用AI算法的嵌入式傳感器平臺(tái)—從大數(shù)據(jù)到智能數(shù)據(jù)的本地
工業(yè) 4.0 應(yīng)用會(huì)產(chǎn)生大量復(fù)雜數(shù)據(jù)——大數(shù)據(jù)。越來越多的傳感器以及通常可用的數(shù)據(jù)源要求機(jī)器、系統(tǒng)和過程的虛擬視圖更加詳細(xì)。這自然增加了在整個(gè)價(jià)值鏈中產(chǎn)生附加值的潛力。然而,與此同時(shí),關(guān)于如何精確提取這種潛力的問題不斷出現(xiàn)——畢竟,數(shù)據(jù)處理的系統(tǒng)和架構(gòu)變得越來越復(fù)雜,傳感器和執(zhí)行器的數(shù)量也在不斷增加。只有使用相關(guān)、高質(zhì)量和有用的數(shù)據(jù)——智能數(shù)據(jù)——才能展現(xiàn)相關(guān)的經(jīng)濟(jì)潛力。
挑戰(zhàn)
收集所有可能的數(shù)據(jù)并將其存儲(chǔ)在云中,希望以后對其進(jìn)行評估,分析和結(jié)構(gòu)化,仍然是一種普遍但不是特別有效的方法。從數(shù)據(jù)中產(chǎn)生附加值的潛力仍未得到利用;以后尋找解決方案變得更加復(fù)雜和昂貴。更好的替代方法是盡早進(jìn)行概念考慮,以確定哪些信息與應(yīng)用程序相關(guān),以及信息在數(shù)據(jù)流中的哪個(gè)位置可以提取。形象地說,這意味著提煉數(shù)據(jù),例如,從大數(shù)據(jù)中為整個(gè)處理鏈制作智能數(shù)據(jù)。在應(yīng)用程序級別,已經(jīng)可以決定哪些AI算法在單獨(dú)的處理步驟中具有很高的成功概率。這取決于邊界條件,例如可用數(shù)據(jù)、應(yīng)用類型、可用傳感器模式以及有關(guān)較低級別物理過程的背景信息。
對于各個(gè)處理步驟,正確處理和解釋數(shù)據(jù)對于從傳感器信號中產(chǎn)生真正的附加值非常重要。根據(jù)應(yīng)用的不同,可能難以正確解釋離散傳感器數(shù)據(jù)并提取所需信息。通常,時(shí)間行為會(huì)發(fā)揮作用,并對所需的信息產(chǎn)生直接影響。此外,必須經(jīng)常考慮多個(gè)傳感器之間的依賴關(guān)系。對于復(fù)雜的任務(wù),簡單的閾值和手動(dòng)確定的邏輯不再足夠,或者無法自動(dòng)適應(yīng)不斷變化的環(huán)境條件。
嵌入式、邊緣還是云 AI 實(shí)施?
整個(gè)數(shù)據(jù)處理鏈以及每個(gè)步驟所需的所有算法必須以這樣一種方式實(shí)現(xiàn),以便能夠產(chǎn)生盡可能高的附加值。實(shí)施通常發(fā)生在各個(gè)級別 - 從計(jì)算資源有限的小型傳感器到網(wǎng)關(guān)和邊緣計(jì)算機(jī),再到大型云計(jì)算機(jī)。很明顯,算法不應(yīng)該只在一個(gè)層面上實(shí)現(xiàn)。相反,在大多數(shù)情況下,實(shí)現(xiàn)盡可能靠近傳感器的算法更有利。通過這種方式,數(shù)據(jù)在早期階段被壓縮和提煉,并降低了通信和存儲(chǔ)成本。此外,通過早期從數(shù)據(jù)中提取基本信息,在更高級別開發(fā)全局算法就不那么復(fù)雜了。在大多數(shù)情況分析領(lǐng)域的算法也可用于避免不必要的數(shù)據(jù)存儲(chǔ),從而避免高數(shù)據(jù)傳輸和存儲(chǔ)成本。這些算法僅使用每個(gè)數(shù)據(jù)點(diǎn)一次;例如,直接提取完整的信息,不需要存儲(chǔ)數(shù)據(jù)。
用于基于狀態(tài)的監(jiān)控的嵌入式平臺(tái)
Shiratech Solutions、Arrow 和 ADI 公司的基于 ARM Cortex-M4F 處理器的開放式嵌入式平臺(tái) iCOMOX 是一款極其省電的集成微控制器系統(tǒng),具有集成電源管理功能,以及用于數(shù)據(jù)采集、處理、控制和連接的模擬和數(shù)字傳感器以及外圍設(shè)備。所有這些都使其成為本地?cái)?shù)據(jù)處理和采用最先進(jìn)的智能AI算法早期細(xì)化數(shù)據(jù)的非常好的候選者。??
iCOMOX代表智能狀態(tài)監(jiān)測箱,可用于進(jìn)入基于振動(dòng),磁場,聲音和溫度分析的結(jié)構(gòu)健康和機(jī)器狀態(tài)監(jiān)測領(lǐng)域。根據(jù)要求,該平臺(tái)可以補(bǔ)充其他傳感器模式,例如,ADI公司的陀螺儀,即使在具有高沖擊和振動(dòng)負(fù)載的環(huán)境中,也能精確測量轉(zhuǎn)速(見圖2)。iCOMOX中實(shí)施的AI方法可以通過所謂的多傳感器數(shù)據(jù)融合更好地估計(jì)當(dāng)前情況。通過這種方式,可以對各種運(yùn)行和故障條件進(jìn)行更好的粒度和更高的概率進(jìn)行分類。通過iCOMOX中的智能信號處理,大數(shù)據(jù)成為智能數(shù)據(jù),因此只需要將與應(yīng)用案例相關(guān)的數(shù)據(jù)發(fā)送到邊緣或云端。
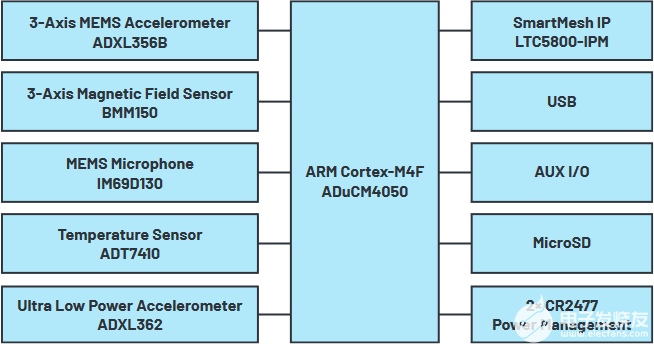
圖2.iCOMOX的框圖。
對于無線通信,iCOMOX提供了一種具有高可靠性和魯棒性以及極低功耗的解決方案。SmartMesh IP 網(wǎng)絡(luò)由高度可擴(kuò)展、自形成/優(yōu)化的無線節(jié)點(diǎn)多跳網(wǎng)組成,用于收集和中繼數(shù)據(jù)。網(wǎng)絡(luò)管理器監(jiān)視和管理網(wǎng)絡(luò)性能和安全性,并與主機(jī)應(yīng)用程序交換數(shù)據(jù)。SmartMesh IP 網(wǎng)絡(luò)的智能路由會(huì)考慮連接質(zhì)量、每個(gè)數(shù)據(jù)包事務(wù)的時(shí)間表以及通信鏈路中的多跳數(shù),為每個(gè)單獨(dú)的數(shù)據(jù)包確定最佳路徑。?
特別是對于無線電池供電的狀態(tài)監(jiān)測系統(tǒng),嵌入式人工智能可以幫助提取全部附加值。與將原始傳感器數(shù)據(jù)直接傳輸?shù)竭吘壔蛟葡啾龋ㄟ^嵌入在iCOMOX中的AI算法將傳感器數(shù)據(jù)本地轉(zhuǎn)換為智能數(shù)據(jù)可降低數(shù)據(jù)流,從而降低功耗。
應(yīng)用范圍
iCOMOX包括為其開發(fā)的AI算法,在監(jiān)控機(jī)器、系統(tǒng)、結(jié)構(gòu)和過程領(lǐng)域具有廣泛的應(yīng)用——從異常檢測到復(fù)雜的故障診斷和立即啟動(dòng)故障消除。通過集成麥克風(fēng)和加速度計(jì)、磁場傳感器和溫度傳感器,iCOMOX 可以監(jiān)控各種工業(yè)機(jī)器和系統(tǒng)中的振動(dòng)和噪音以及其他操作條件。過程狀態(tài)、軸承或轉(zhuǎn)子和定子損壞、控制電子設(shè)備故障等,甚至系統(tǒng)行為的未知變化,例如由于電子設(shè)備損壞,都可以通過AI檢測到。如果行為模型可用于某些損害,甚至可以預(yù)測這些損害。通過這種方式,可以在早期階段采取維護(hù)措施,從而避免不必要的基于損壞的故障。如果不存在預(yù)測模型,嵌入式平臺(tái)還可以幫助主題專家連續(xù)學(xué)習(xí)機(jī)器的行為,并隨著時(shí)間的推移推導(dǎo)出用于預(yù)測性維護(hù)的機(jī)器綜合模型。此外,iCOMOX還可用于優(yōu)化復(fù)雜的制造工藝,以實(shí)現(xiàn)更高的產(chǎn)量或更好的產(chǎn)品質(zhì)量。
用于智能傳感器的嵌入式 AI 算法
通過AI算法進(jìn)行數(shù)據(jù)處理,甚至可以對復(fù)雜的傳感器數(shù)據(jù)進(jìn)行自動(dòng)分析。通過這種方式,所需的信息以及由此產(chǎn)生的附加值會(huì)自動(dòng)從數(shù)據(jù)處理鏈中的數(shù)據(jù)中獲取。算法的選擇通常取決于有關(guān)應(yīng)用程序的現(xiàn)有知識(shí)。如果可以獲得廣泛的領(lǐng)域知識(shí),人工智能將發(fā)揮更多的支持作用,并且使用的算法非常基本。如果沒有專業(yè)知識(shí),算法可能會(huì)復(fù)雜得多。在許多情況下,是應(yīng)用程序定義了硬件,并通過它定義了算法的限制。
對于始終是AI算法一部分的模型構(gòu)建,基本上有兩種不同的方法:數(shù)據(jù)驅(qū)動(dòng)方法和基于模型的方法。
使用數(shù)據(jù)驅(qū)動(dòng)方法進(jìn)行異常檢測
如果只有數(shù)據(jù),但沒有可以用數(shù)學(xué)方程式形式描述的背景信息,那么必須選擇所謂的數(shù)據(jù)驅(qū)動(dòng)方法。這些算法直接從傳感器數(shù)據(jù)(大數(shù)據(jù))中提取所需的信息(智能數(shù)據(jù))。它們涵蓋了全方位的機(jī)器學(xué)習(xí)方法,包括線性回歸、神經(jīng)網(wǎng)絡(luò)、隨機(jī)森林和隱馬爾可夫模型。
可以在嵌入式平臺(tái)(如 iCOMOX)上實(shí)現(xiàn)的數(shù)據(jù)驅(qū)動(dòng)方法的典型算法管道由三個(gè)組件組成(見圖 3):1) 數(shù)據(jù)預(yù)處理,2) 特征提取和降維,以及 3) 實(shí)際的機(jī)器學(xué)習(xí)算法。
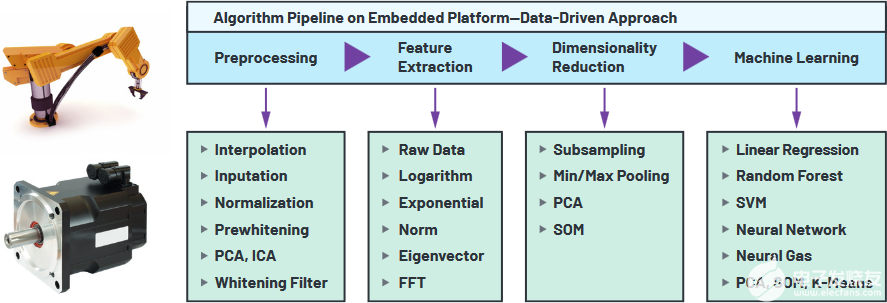
圖3.嵌入式平臺(tái)的數(shù)據(jù)驅(qū)動(dòng)方法。
在數(shù)據(jù)預(yù)處理過程中,數(shù)據(jù)的處理方式使下游算法(尤其是機(jī)器學(xué)習(xí)算法)在盡可能短的時(shí)間內(nèi)收斂到最佳解決方案。因此,必須使用簡單的插值方法替換缺失的數(shù)據(jù),同時(shí)考慮到時(shí)間依賴性和不同傳感器數(shù)據(jù)之間的相互依賴性。此外,數(shù)據(jù)通過預(yù)白化算法進(jìn)行修改,使它們看起來是相互獨(dú)立的。因此,在時(shí)間序列中或傳感器之間不再有線性依賴關(guān)系。主成分分析 (PCA)、獨(dú)立成分分析 (ICA) 和所謂的白化過濾器是預(yù)白化的典型算法。
在特征提取期間,特征(也稱為特征)派生自預(yù)處理的數(shù)據(jù)。加工鏈的這一部分在很大程度上取決于實(shí)際應(yīng)用。由于嵌入式平臺(tái)的計(jì)算能力有限,這里還不可能實(shí)現(xiàn)計(jì)算密集型的全自動(dòng)算法來評估各種特征并使用特定的優(yōu)化標(biāo)準(zhǔn)來找到最佳特征——遺傳算法將包含在其中。相反,對于低功耗的嵌入式平臺(tái)(如iCOMOX),必須為每個(gè)單獨(dú)的應(yīng)用程序手動(dòng)指定用于提取特征的方法。可能的方法包括將數(shù)據(jù)轉(zhuǎn)換為頻域(快速傅里葉變換)、對原始傳感器數(shù)據(jù)應(yīng)用對數(shù)、歸一化加速度計(jì)或陀螺儀數(shù)據(jù)、查找 PCA 中最大的特征向量,或?qū)υ紓鞲衅鲾?shù)據(jù)執(zhí)行其他計(jì)算。還可以為不同的傳感器選擇不同的特征提取算法。因此,將獲得包含來自所有傳感器的所有相關(guān)特征的大型特征向量。
如果這個(gè)向量的維數(shù)超過一定大小,就必須通過降維算法來降維。可以簡單地獲取特定窗口內(nèi)的最小值和/或最大值,也可以使用更復(fù)雜的算法,例如前面提到的PCA或自組織映射(SOM)。
只有在對數(shù)據(jù)進(jìn)行完全預(yù)處理并提取與相應(yīng)應(yīng)用程序相關(guān)的特征之后,才能在嵌入式平臺(tái)上最佳地使用機(jī)器學(xué)習(xí)算法來提取不同的信息。與特征提取的情況一樣,機(jī)器學(xué)習(xí)算法的選擇在很大程度上取決于各自的具體應(yīng)用。由于計(jì)算能力有限,全自動(dòng)選擇最佳學(xué)習(xí)算法(例如,通過遺傳算法)也是不可能的。然而,即使是更復(fù)雜的神經(jīng)網(wǎng)絡(luò),包括訓(xùn)練階段,也可以在iCOMOX等嵌入式平臺(tái)上實(shí)現(xiàn)。這里的決定性因素是有限的可用內(nèi)存。因此,必須修改機(jī)器學(xué)習(xí)算法以及整個(gè)算法管道中前面提到的所有算法,以便直接處理傳感器數(shù)據(jù)。每個(gè)數(shù)據(jù)點(diǎn)僅由算法使用一次;例如,直接提取所有相關(guān)信息,消除了大量數(shù)據(jù)的內(nèi)存密集型收集以及相關(guān)的高數(shù)據(jù)傳輸和存儲(chǔ)成本。這種類型的處理也稱為流分析。
前面提到的算法流水線在iCOMOX上實(shí)現(xiàn),并在兩種不同的應(yīng)用中評估了異常檢測:交流電機(jī)的基于狀態(tài)的監(jiān)控和工業(yè)機(jī)器人的軌跡監(jiān)控。兩個(gè)應(yīng)用程序的算法基本相同;只有參數(shù)化的區(qū)別在于,所考慮的時(shí)間間隔對于電機(jī)監(jiān)控來說很短,而對于軌跡監(jiān)測來說很長。通過硬件的限制,還對其余算法參數(shù)推導(dǎo)出了不同的值。采樣率為1 kHz的加速度計(jì)和陀螺儀數(shù)據(jù)用作輸入數(shù)據(jù)。對于電機(jī)狀態(tài)監(jiān)測,傳聲器數(shù)據(jù)也被用作輸入數(shù)據(jù),以包括聲學(xué)特性,從而提高異常檢測精度。嵌入式平臺(tái)上的本地計(jì)算結(jié)果如圖4和圖5所示。在這兩個(gè)示例中,都提供了加速度計(jì)和陀螺儀數(shù)據(jù)、局部派生的特征以及局部計(jì)算的異常指示器。該指標(biāo)隨著新的信號行為而急劇增加,并且在再次出現(xiàn)時(shí)要低得多;也就是說,新檢測到的信號被學(xué)習(xí)算法在模型中考慮和更新。
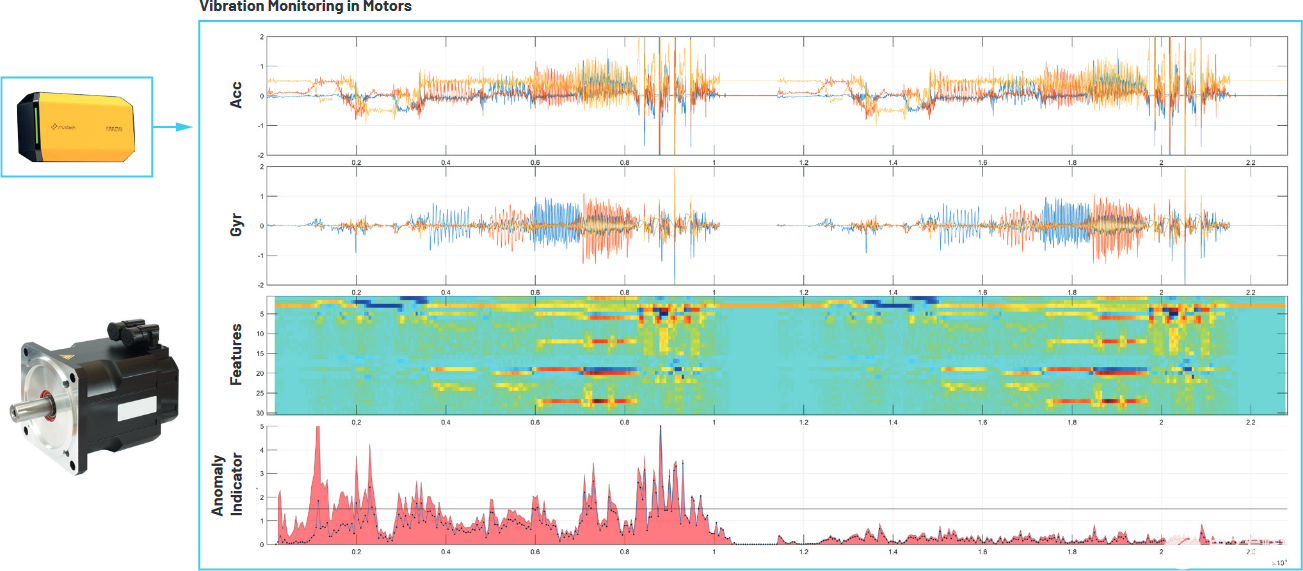
圖4.嵌入式平臺(tái)上交流電機(jī)的振動(dòng)監(jiān)測。
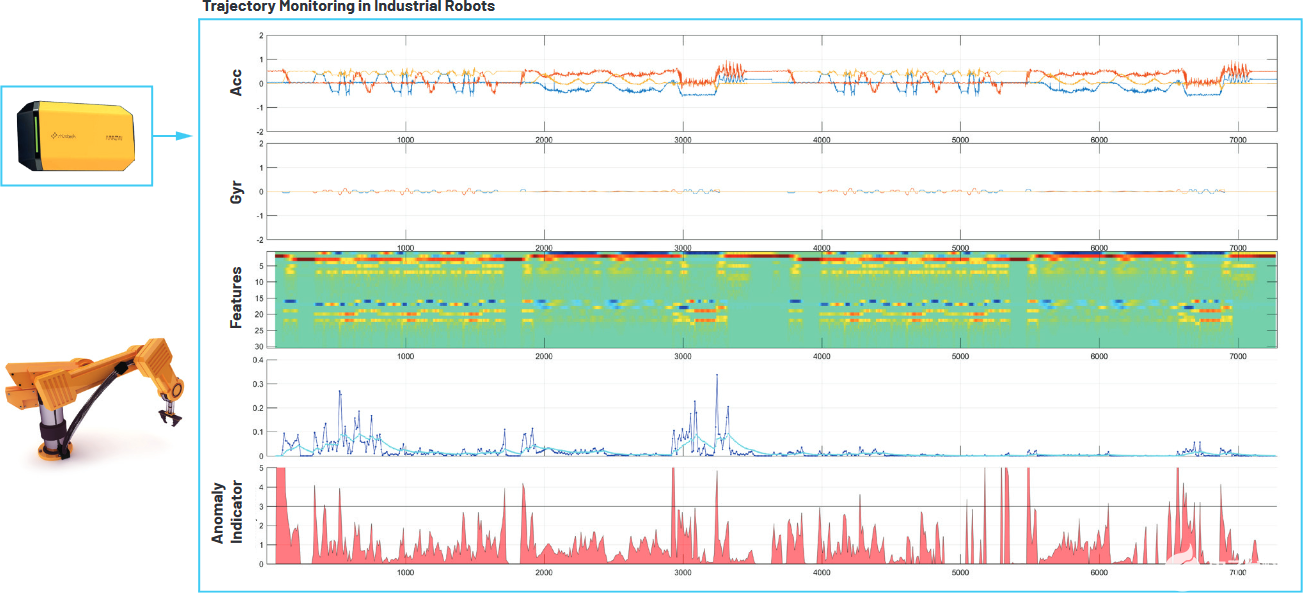
圖5.嵌入式平臺(tái)上工業(yè)機(jī)器人的軌跡監(jiān)控。
使用基于模型的方法進(jìn)行動(dòng)態(tài)姿態(tài)估計(jì)
另一種根本不同的方法是通過公式和傳感器數(shù)據(jù)與所需信息之間的顯式關(guān)系進(jìn)行建模。這些方法需要以數(shù)學(xué)描述的形式提供物理背景信息或系統(tǒng)行為。這些所謂的基于模型的方法將傳感器數(shù)據(jù)與該背景信息相結(jié)合,為所需信息產(chǎn)生更精確的結(jié)果。這里一些最著名的例子是用于線性系統(tǒng)的卡爾曼濾波器(KF)和用于非線性系統(tǒng)的無跡卡爾曼濾波器(UKF),擴(kuò)展卡爾曼濾波器(EKF)和粒子濾波器(PF)。過濾器的選擇在很大程度上取決于相應(yīng)的應(yīng)用。
可以在嵌入式平臺(tái)(如 iCOMOX)上實(shí)現(xiàn)的基于模型的方法的典型算法流水線由三個(gè)組件組成(參見圖 6):1) 異常值檢測、2) 預(yù)測步驟和 3) 過濾步驟。
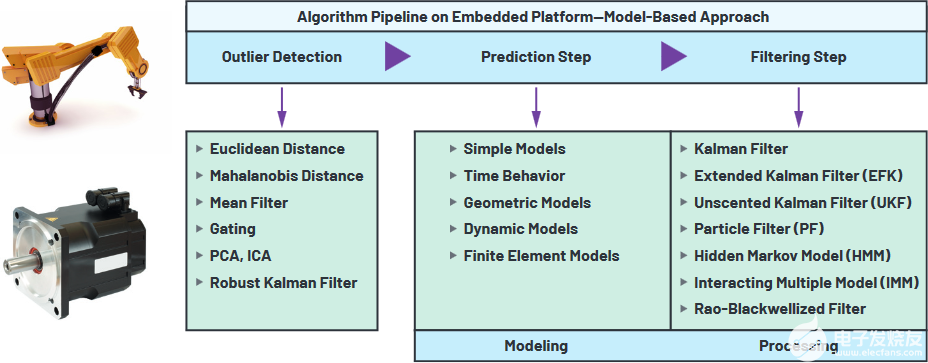
圖6.面向嵌入式平臺(tái)的基于模型的方法。
在異常值檢測期間,與系統(tǒng)條件的實(shí)際估計(jì)值相去甚遠(yuǎn)的傳感器數(shù)據(jù)要么進(jìn)行分?jǐn)?shù)加權(quán),要么在進(jìn)一步處理中完全取出。通過這種方式,可以實(shí)現(xiàn)更強(qiáng)大的數(shù)據(jù)處理。
在預(yù)測步驟中,當(dāng)前系統(tǒng)狀況會(huì)隨時(shí)間更新。這是在描述未來系統(tǒng)狀況預(yù)測的概率系統(tǒng)模型的幫助下完成的。這種概率系統(tǒng)模型通常來自確定性系統(tǒng)方程,該方程描述了未來系統(tǒng)條件對當(dāng)前系統(tǒng)條件以及其他輸入?yún)?shù)和干擾的依賴性。在這里考慮的工業(yè)機(jī)器人狀態(tài)監(jiān)測示例中,這將是單個(gè)關(guān)節(jié)臂的動(dòng)態(tài)方程,它只允許在任何時(shí)間點(diǎn)的某些運(yùn)動(dòng)方向。
在過濾步驟中,然后使用給定的測量值處理預(yù)測的系統(tǒng)狀況,并因此更新條件估計(jì)值。有一個(gè)等效于系統(tǒng)方程的測量方程,可以在公式中描述系統(tǒng)條件和測量之間的關(guān)系。對于這里考慮的位置估計(jì),這將是加速度計(jì)和陀螺儀數(shù)據(jù)與傳感器在空間中的精確位置之間的關(guān)系。
數(shù)據(jù)驅(qū)動(dòng)和基于模型的方法的結(jié)合對于某些應(yīng)用程序來說既是可以想象的,也是有利的。例如,基于模型的方法的基礎(chǔ)模型參數(shù)可以通過數(shù)據(jù)驅(qū)動(dòng)的方法確定,也可以動(dòng)態(tài)適應(yīng)相應(yīng)的環(huán)境條件。此外,基于模型的方法的系統(tǒng)條件可以成為數(shù)據(jù)驅(qū)動(dòng)方法的特征向量的一部分。但是,所有這些都在很大程度上取決于各自的應(yīng)用。
前面提到的算法流水線是在iCOMOX上實(shí)現(xiàn)的,并在工業(yè)機(jī)器人末端執(zhí)行器中評估了精確的動(dòng)態(tài)姿態(tài)估計(jì)。采樣率為200 Hz的加速度計(jì)和陀螺儀數(shù)據(jù)用作輸入數(shù)據(jù)。iCOMOX連接到工業(yè)機(jī)器人的末端執(zhí)行器上,并確定其姿勢(包括位置和方向)。結(jié)果如圖 7 所示。如圖所示,直接計(jì)算會(huì)導(dǎo)致非常快的反應(yīng),但也會(huì)產(chǎn)生大量異常值的噪聲。在實(shí)踐中常用的IIR濾波器會(huì)產(chǎn)生非常平滑的信號,但它對真實(shí)姿勢的跟隨非常差。相比之下,這里介紹的算法會(huì)產(chǎn)生非常平滑的信號,其中估計(jì)的姿勢非常精確和動(dòng)態(tài)地跟隨工業(yè)機(jī)器人末端執(zhí)行器的運(yùn)動(dòng)。
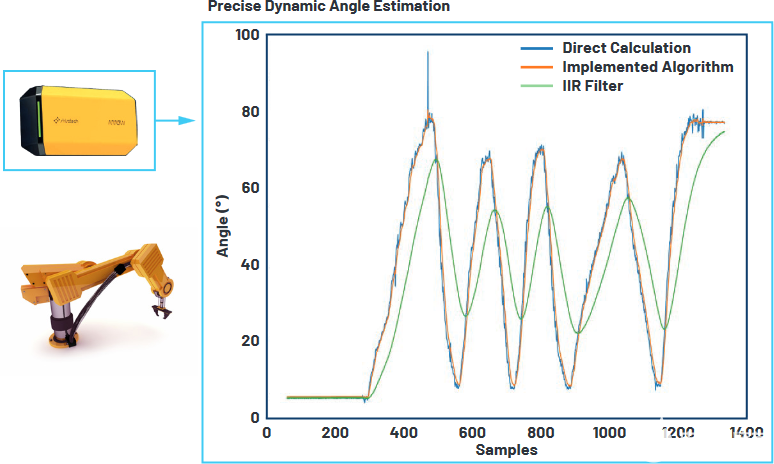
圖7.嵌入式平臺(tái)上的精確動(dòng)態(tài)角度估計(jì)。與直接計(jì)算和IIR濾波相比,實(shí)現(xiàn)的算法顯示出更好的性能。
結(jié)論
理想情況下,通過相應(yīng)的本地?cái)?shù)據(jù)分析,AI算法還應(yīng)該能夠自行決定哪些傳感器與相應(yīng)的應(yīng)用相關(guān),哪種算法最適合它。這意味著平臺(tái)的智能可擴(kuò)展性。目前,必須為相應(yīng)的應(yīng)用程序找到最佳算法仍然是主題專家,即使這里使用的AI算法已經(jīng)可以以最少的實(shí)現(xiàn)工作量擴(kuò)展到機(jī)器狀態(tài)和結(jié)構(gòu)健康監(jiān)測的各種應(yīng)用程序。
嵌入式人工智能還應(yīng)該就數(shù)據(jù)質(zhì)量做出決定,如果數(shù)據(jù)質(zhì)量不足,則找到并為傳感器和整個(gè)信號處理進(jìn)行最佳設(shè)置。如果使用幾種不同的傳感器模式進(jìn)行融合,則可以通過使用AI算法來彌補(bǔ)某些傳感器和方法的弱點(diǎn)和缺點(diǎn)。通過這種方式,提高了數(shù)據(jù)質(zhì)量和系統(tǒng)可靠性。如果傳感器被 AI 算法分類為與相應(yīng)應(yīng)用程序不相關(guān)或不太相關(guān),則可以相應(yīng)地限制其數(shù)據(jù)流。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753083 -
嵌入式
+關(guān)注
關(guān)注
5082文章
19104瀏覽量
304825 -
人工智能
+關(guān)注
關(guān)注
1791文章
47183瀏覽量
238265
發(fā)布評論請先 登錄
相關(guān)推薦
基于嵌入式網(wǎng)絡(luò)的無線傳感器網(wǎng)絡(luò)平臺(tái)軟硬件實(shí)現(xiàn)
對嵌入式加密芯片的理解
采用智能卡平臺(tái)的LKT系列加密IC介紹
嵌入式云計(jì)算與視頻大數(shù)據(jù)——基于TI嵌入式處理器
如何輕松整合傳感器到嵌入式系統(tǒng)
嵌入式系統(tǒng)與人工智能
嵌入式智能傳感器的定義及特點(diǎn)
嵌入式LINUX的WEB傳感器網(wǎng)絡(luò)網(wǎng)關(guān)的設(shè)計(jì)
怎么設(shè)計(jì)基于嵌入式網(wǎng)絡(luò)的無線傳感器網(wǎng)絡(luò)平臺(tái)?
嵌入式好還是大數(shù)據(jù)好
激光雷達(dá)點(diǎn)云數(shù)據(jù)分割算法的嵌入式平臺(tái)上的部署實(shí)現(xiàn)
如何構(gòu)建一個(gè)傳感器網(wǎng)絡(luò)的嵌入式遠(yuǎn)程測控系統(tǒng)?
用嵌入式AI技術(shù)提升智能硬件應(yīng)用能力
利用嵌入式AI,將大數(shù)據(jù)轉(zhuǎn)變?yōu)?b class='flag-5'>智能數(shù)據(jù)
物通博聯(lián)嵌入式數(shù)據(jù)采集網(wǎng)關(guān)采集傳感器的數(shù)據(jù)上傳到云端






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論