") 直接使用慣性測(cè)量單元 (IMU)
直接使用慣性測(cè)量單元 (IMU)
我的童年是很久以前的事了。沒有手持電子產(chǎn)品,沒有視頻游戲,沒有便攜式設(shè)備。相反,那是培樂多、橡皮泥、魔術(shù) 8 號(hào)球、飛盤和 Slinky 的時(shí)代。我記憶猶新的玩具是 Mattel Wiz-z-zer。它本質(zhì)上是一個(gè)陀螺儀,一個(gè)裝在盒子里的旋轉(zhuǎn)輪,是一種將陀螺引入現(xiàn)代兒童的玩具(圖 1)。扭轉(zhuǎn)使用了一種超級(jí)旋轉(zhuǎn)的高科技軸承,可以讓陀螺以非常高的速度旋轉(zhuǎn),這樣它就可以長時(shí)間保持站立。我仍然可以聽到它發(fā)出的聲音,因?yàn)槲壹铀偎M(jìn)行高速旋轉(zhuǎn),然后釋放它在地板上自由旋轉(zhuǎn)。
這個(gè)陀螺儀陀螺儀是一個(gè)改良的陀螺儀。由于角動(dòng)量守恒,陀螺儀在旋轉(zhuǎn)時(shí)保持直立(Newton (1687)、Laplace (1799)、Foucault (1852)、Rankine (1858) 等)。由于這種現(xiàn)象,陀螺儀可用于測(cè)量或保持方位和角速度。
微機(jī)電系統(tǒng)
今天的現(xiàn)代電子設(shè)計(jì)已經(jīng)采用了這種機(jī)械知識(shí)并將其制成傳感器。這種傳感器可以通過采用微機(jī)電系統(tǒng) (MEMS) 來制造。MEMS 傳感器技術(shù)可實(shí)現(xiàn)傳感器融合,從而將多個(gè)傳感器和軟件解決方案打包為一個(gè)集成整體。因此,它有助于為各種大型行業(yè)提供解決方案,包括信息和通信技術(shù) (ICT)、物聯(lián)網(wǎng) (IoT) 和汽車。半導(dǎo)體制造商校準(zhǔn)這些集成解決方案并利用嵌入式補(bǔ)償和傳感器處理,以及一個(gè)簡(jiǎn)單的可編程接口。
處于人性化 MEMS 傳感器技術(shù)前沿的是TDK InvenSense。InvenSense 隸屬于 TDK 傳感器系統(tǒng)業(yè)務(wù)公司。它是面向消費(fèi)、工業(yè)、汽車和物聯(lián)網(wǎng)細(xì)分市場(chǎng)的 MEMS 運(yùn)動(dòng)、音頻和壓力解決方案的行業(yè)領(lǐng)導(dǎo)者。憑借強(qiáng)大的 MEMS 3/6/7/9 軸運(yùn)動(dòng)傳感器產(chǎn)品組合,以及最高性能的 MEMS 音頻麥克風(fēng)和壓力傳感器,TDK 不斷突破性能和質(zhì)量的界限,為多個(gè)行業(yè)設(shè)定了新的創(chuàng)新標(biāo)準(zhǔn)。讓我們來看看 TDK InvenSense 的 MEMS 慣性測(cè)量單元 (IMU) 如何幫助設(shè)計(jì)工程師直接了解物體的位置。
IMU
MEMS 技術(shù)允許將精密陀螺儀、加速度計(jì)、磁力計(jì)和壓力傳感器的多軸組合組裝到一個(gè)設(shè)備中。采用這些類型傳感器的集成設(shè)備通常稱為慣性測(cè)量單元 (IMU)。IMU 是一種電子設(shè)備,可測(cè)量和報(bào)告人體的比力、角速率,通常還包括人體的方向。艾薩克·牛頓 (1642–1726/27) 將慣性描述為第一條運(yùn)動(dòng)定律(《自然哲學(xué)的數(shù)學(xué)原理》, 1687) 通過這樣定義它:“每個(gè)物體都堅(jiān)持其靜止?fàn)顟B(tài),或勻速直線運(yùn)動(dòng),除非它被施加在其上的力被迫改變?cè)摖顟B(tài)。” MEMS 技術(shù)可靠地感測(cè)和處理多個(gè)自由度 (DoF),即使在高度復(fù)雜的應(yīng)用和動(dòng)態(tài)條件下也是如此。
多自由度
選擇 IMU 的一個(gè)重要標(biāo)準(zhǔn)是自由度。IMU 通常具有 2 到 10 個(gè)自由度的規(guī)格。
自由這個(gè)詞在不同的語境中有不同的含義。在這種情況下,我們不是在談?wù)搨€(gè)人選擇自由或政治自由,而是在物理學(xué)的背景下,特別是力學(xué)。在力學(xué)中,自由度對(duì)應(yīng)于定義其配置或狀態(tài)的平移分量和旋轉(zhuǎn)。例如,對(duì)于空間中的剛體,平移和旋轉(zhuǎn)都具有三個(gè)分量,總共產(chǎn)生六個(gè)自由度(圖 2)。
翻譯:向前/向后
翻譯:左/右
翻譯:上/下
旋轉(zhuǎn):左右(滾動(dòng))
旋轉(zhuǎn):向前/向后(俯仰)
旋轉(zhuǎn):左/右(偏航)
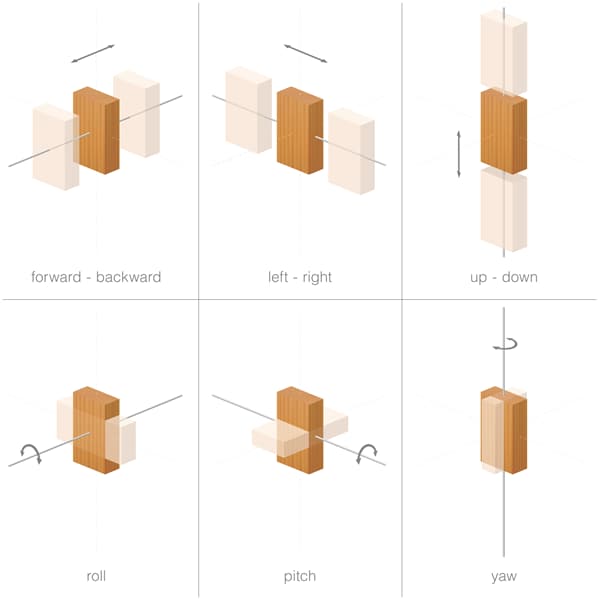
圖 2:六個(gè)自由度。剛體在 3D 空間中移動(dòng)的可能性。前、后、左、右、上、下,加上繞三個(gè)軸的旋轉(zhuǎn)。(來源:Peter Hermes Furian/Shutterstock.com)
加速度計(jì)(測(cè)量速度變化 → 獲取位置)和陀螺儀(測(cè)量角速度 → 獲取方向)可以結(jié)合起來收集信息,使設(shè)備能夠計(jì)算多達(dá)六個(gè)自由度。那么,多于六個(gè) DoF 的想法從何而來?IMU 供應(yīng)商已經(jīng)注意到,如果他們采用進(jìn)一步的傳感器融合,他們可以獲得更高的性能。他們添加了另一個(gè)傳感器來改進(jìn)讀數(shù)、減少錯(cuò)誤并獲得更多有說服力的數(shù)據(jù)以支持內(nèi)部調(diào)整和補(bǔ)償。添加磁力計(jì)可提供新的傳感器信息。磁力計(jì)感測(cè)地球磁場(chǎng),提供允許獲得定向航向的數(shù)據(jù)。當(dāng)此信息與加速度計(jì)和陀螺儀傳感器融合時(shí),傳感器制造商表示他們擁有三個(gè)以上的自由度。因此,
需要明確的是,這是一些術(shù)語的混合。從技術(shù)上講,物理學(xué)定義了六個(gè)自由度。但是,IMU 設(shè)備在傳感器融合方案中的三個(gè)獨(dú)立軸上采用了三個(gè)不同的傳感器,從而為解決方案帶來了九個(gè)傳感器輸入。
早些時(shí)候我說過一些 IMU 有 10 個(gè)自由度。我剛剛解釋了九個(gè)。一個(gè)人如何達(dá)到10?
很簡(jiǎn)單,添加另一個(gè)傳感器。在這種情況下,添加氣壓傳感器將提供更多信息。結(jié)合氣壓傳感器現(xiàn)在可以實(shí)現(xiàn) IMU 制造商所稱的 10 個(gè)自由度:
3 自由度加速度計(jì)
3 自由度陀螺儀
3 自由度磁力計(jì)
1 個(gè)自由度氣壓計(jì)(壓力)
10 自由度
結(jié)論
與我年輕時(shí)的許多玩具不同,現(xiàn)代電子產(chǎn)品需要越來越多的傳感功能。傳感器融合結(jié)合了支持 ICT、物聯(lián)網(wǎng)和汽車的多個(gè)傳感器和軟件解決方案。您已經(jīng)了解了 IMU 如何將眾多傳感器組合到一個(gè)集成的單片設(shè)備中。就像陀螺一樣,我希望我已經(jīng)讓您明白 TDK InvenSense 是最佳觀察點(diǎn),以便您在下一個(gè)設(shè)計(jì)中意識(shí)到 IMU 的優(yōu)勢(shì)。
審核編輯黃昊宇
-
IMU
+關(guān)注
關(guān)注
6文章
306瀏覽量
45727
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
愛普生(EPSON) 慣性測(cè)量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹

AGV慣導(dǎo)應(yīng)用之無人牽引車慣性測(cè)量單元IMU

ADIS16470微型MEMS慣性測(cè)量單元(IMU)英文手冊(cè)
M-G330PDG慣性測(cè)量單元:精準(zhǔn)控制與智能應(yīng)用的核心

微小層面的專用慣性測(cè)量單元——M-G364PDCA

愛普生的慣性測(cè)量單元(IMU)M-G370PDT成為無人駕駛的理想選擇
北微車規(guī)級(jí)慣性測(cè)量單元(IMU)芯片項(xiàng)目正式啟動(dòng)

雷達(dá)精準(zhǔn)探測(cè)的臂助——愛普生新款慣性測(cè)量單元HGPM01






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論