 組件增益推動下一代協作機器人
組件增益推動下一代協作機器人
幾十年來,機器人一直是制造業的一部分,但工業 5.0的到來在大數據的推動下,正在幫助重組方程式,以支持機器人不僅增加而且靈活的自動化。當然,仍然需要關在籠子里的巨型機器人,它們可以在一分鐘內將汽車保險杠搗碎,但它們更靈活、體積更小的表親:協作機器人也是如此。協作機器人,簡稱為協作機器人,與更傳統的機器人相比具有許多優勢:它們可以快速重新編程以承擔新任務,甚至可以在一天內完成。協作機器人與人類相處融洽,并能高效地與他們一起工作。通常情況下,協作機器人會承擔重復和無聊的任務,從而讓人類有時間從事更復雜的工作。最重要的是,協作機器人被認為具有成本效益,這意味著即使是中小型企業也能負擔得起自動化。
協作機器人正在推動工業 5.0,即下一次工業革命。2018 年全球協作機器人市場價值 6.491 億美元,預計到2025 年將以驚人的 44.5% 的復合年增長率增長。在這里,我們將討論支持下一代協作機器人的一些組件。
協作機器人工業手臂
工業機器人手臂是機械手,有點像人類的手臂。它們的機械關節不是肌肉,而是由外部電源提供動力,通常是電動機。手臂負責繁重的工作,計算機軟件充當大腦。視覺和運動檢測系統幫助它感知物體并根據該信息采取行動。
接近感應
由于協作機器人沒有籠子,它必須滿足一定范圍的安全條件。它必須在任務執行期間啟用接近感應。這樣,當員工靠得太近時,它就會知道強制執行安全停留。更復雜的視覺系統還可以監控人類向它們移動的速度,以便它們可以準時停止并在人類離開時繼續。除了接近感應之外,它還應該允許員工使用標準的緊急停止 (E-stop) 按鈕來覆蓋其行為。
力感應
協作機器人還必須知道何時停止推動或在執行任務時施加多大的力。例如,與處理金屬軸承的機器人相比,處理雞蛋的拾放協作機器人需要施加不同的力。力感應是機械臂的一個重要方面,需要包含嵌入式傳感器以相應地調整其響應。
在制造或其他應用中,機械臂配備了一系列臂端工具選項,從軟夾具到真空吸盤,具體取決于所需的應用。
協作機器人組件
控制機械臂的計算機“大腦”必須能夠時刻感知所有關節的當前角度位置。這是所有工業手臂(包括傳統籠式機器人和協作機器人手臂)控制算法正常運行的基本要求。為了感知關節位置,這些機器人需要將專用傳感器集成到關節電機中。對于機器人制造商而言,這些傳感器是采購的關鍵組件。它們必須在機器人的整個工作壽命期間可靠地工作,即使關節因在工廠地面上加載而變熱時也是如此。這些傳感器的關鍵要求之一是能夠適應非常狹窄的空間。每次重新設計手臂連桿時,都需要選擇與之匹配的傳感器。
TE Connectivity 的工業旋轉變壓器非常符合要求。它們是用于工業伺服電機的模擬角度位置傳感器。這些空心軸高精度旋轉變壓器更可靠,專為低空間要求而設計,允許用戶定制和更大的靈活性。
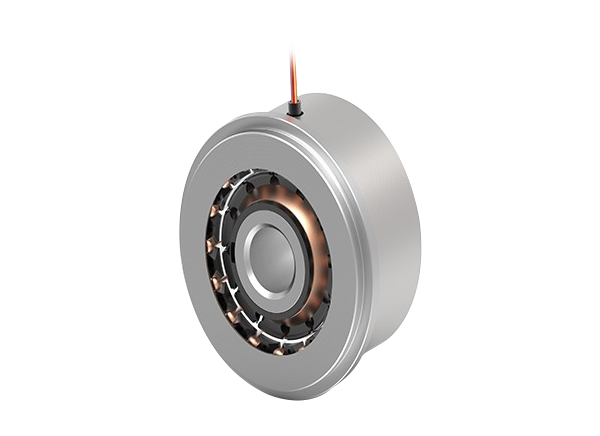
圖 1:TE Connectivity 工業旋轉變壓器提供 360 度范圍內的絕對角度信息,具體取決于版本。(來源:貿澤電子)
像所有工業機器人一樣,協作機器人需要將電力可靠地輸送到它們的電機。有許多用于連接控制信號、電力和電力電子元件的設計選項。在任何情況下,提供這種電源和信號的連接器都需要遵守工業標準,并能承受大量的機械扭曲和彎曲。線對板連接器將電線連接到印刷電路板 (PCB),從而實現電路之間的連接,是設計中要選擇的關鍵部件。同樣,一份通用的物料清單可能規定了一系列相關的連接器,這些連接器具有多種配置以進行混合和匹配。
TE Connectivity 的 ELCON 微型線對板電源解決方案在 3 毫米(觸點間距)的常見工業足跡中提供高達每引腳 12.5A(最大值)的高電流密度。這種常見的行業足跡通過輕松升級現有設計為設計師和工程師提供了設計靈活性。
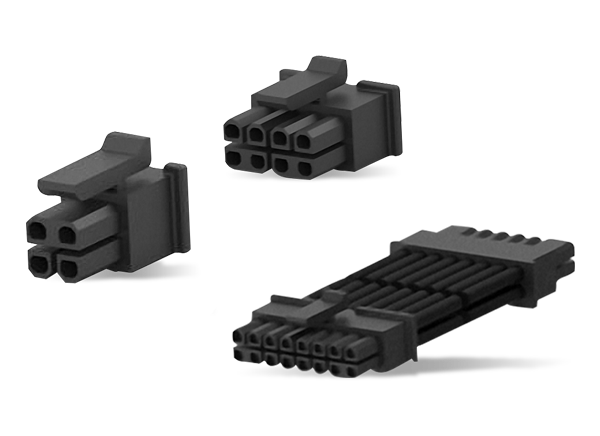
圖 2:TE Connectivity ELCON 微型線對板電源解決方案支持 2 至 24 針配置和不同電流以及不同線徑的多種組合。(來源:貿澤電子)
TE Connectivity 的此類組件可幫助企業設置協作機器人,以滿足其特定的空間限制和編程需求。
結論
隨著自動化程度的不斷提高,協作機器人有望在加快其步伐方面發揮關鍵作用。下一次工業革命,即工業 5.0,已經到來。協作機器人可以在裝配線、零件組裝、驅動螺絲、拋光、檢查和其他日常任務中執行拾取和放置任務。
隨著先進的計算機視覺和傳感功能的引領,驅動這些協作機器人的技術也變得越來越復雜。隨著協作機器人越來越多地被要求以更少的成本做更多的事情,他們將需要類似于 TE Connectivity 的組件來構建下一代協作機器人。
審核編輯黃昊宇
-
機器人
+關注
關注
211文章
28379瀏覽量
206912
發布評論請先 登錄
相關推薦
MiR推出MC600移動協作機器人
中科創達推動下一代多模態智能機器人創新
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
下一代機器人技術:工業自動化的五大趨勢
TE Connectivity 賦能下一代服務機器人






 工商網監
工商網監
評論