") 汽車自適應(yīng)巡航控制系統(tǒng)(ACC)下篇
汽車自適應(yīng)巡航控制系統(tǒng)(ACC)下篇
七優(yōu)缺點
1.ACC的優(yōu)點
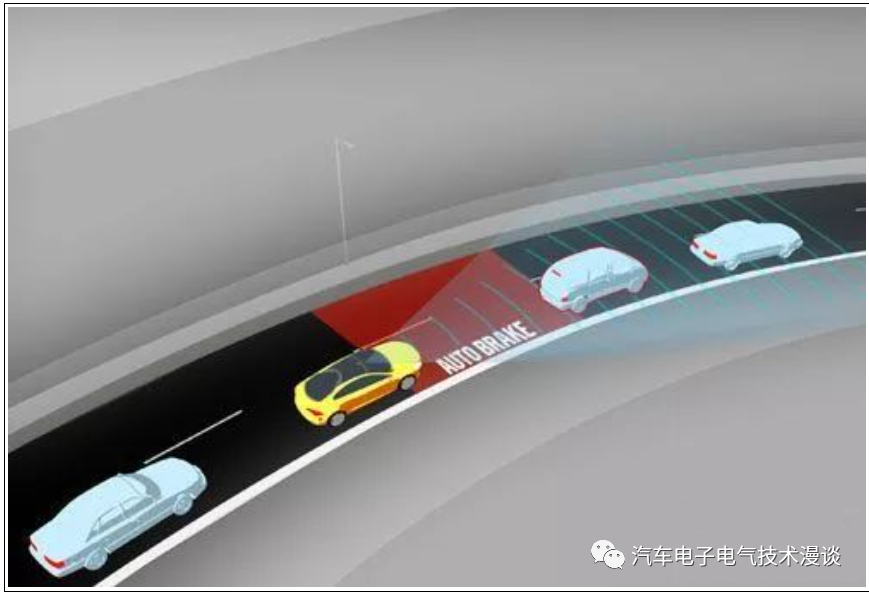
(1)ACC開發(fā)的初衷就是緩解疲勞,最大的好處就是降低駕駛疲勞,提高駕駛舒適度,這是毋庸置疑的優(yōu)勢。ACC系統(tǒng)可以自動保持車速和車距,因而可以解放駕駛者的雙腳,緩解其在長途駕駛中的疲勞程度。當ACC系統(tǒng)探測到前方無車輛時,ACC系統(tǒng)將處于普通的巡航駕駛狀態(tài)。此時,汽車將按照駕駛者預(yù)先設(shè)定的車速勻速行駛。駕駛者只需要進行汽車行駛方向的控制,就可以實現(xiàn)勻速控制的目的。當ACC系統(tǒng)探測到本車前方出現(xiàn)其它行駛車輛時,如果其它汽車的行駛速度小于本車速度時,ACC系統(tǒng)將自動開始進行減速控制,確保兩車的距離保持為預(yù)先設(shè)定的安全距離。這樣就可以防止追尾事故的發(fā)生。當ACC系統(tǒng)探測到本車與前車之間的距離等于安全車距時,將采取跟隨控制策略,即與前方車輛保持相同的車速行駛。當ACC系統(tǒng)探測到前方的汽車發(fā)生換線,或本車換線行駛,使得本車前方又無其它行駛車輛時,ACC系統(tǒng)將對本車進行加速控制,使本車恢復(fù)至設(shè)定的行駛速度。ACC也是自動駕駛前的初級功能,結(jié)合車道保持LKA、車道偏離輔助系統(tǒng)、前向碰撞預(yù)警FCW、自動緊急制動AEB、變道輔助等系統(tǒng),可以獲得半自動駕駛的良好體驗。ACC不僅僅用于高速環(huán)境,可以讓駕駛者在較好的城市路況中極大地解放雙腳甚至雙手,其走走停停功能更能用于市區(qū)擁堵環(huán)境,特別是輕微堵車的情況駕駛疲勞感很大部分來源于不停踩剎車,避免頻頻操作,減輕駕駛員負擔,利用ACC系統(tǒng)就可以輕松保持車距,提高舒適性。使用環(huán)境更廣泛,輔助人類駕駛的作用更為突出,可以提高一定安全性。
(2)ACC系統(tǒng)沒有完全控制汽車的行駛。目前搭載的的ACC系統(tǒng)一般主要考慮駕駛的舒適感。因而ACC系統(tǒng)對于剎車的干預(yù)程度最大僅有剎車力的30%,汽車的最終控制權(quán)仍掌握在駕駛者手中。因此,現(xiàn)有的自適應(yīng)巡航控制系統(tǒng)特別適合車流密度較小的道路,例如快速道路或高速公路。
(3)依據(jù)前車行駛狀況自動調(diào)節(jié)動力輸出,無需頻頻換檔,發(fā)動機始終工作在最佳工作點,降低油耗的同時,減少有害物質(zhì)的排放量,經(jīng)濟環(huán)保。
2.ACC的劣勢/缺點:
(1)ACC系統(tǒng)控制的跟車或啟停的時候,留有車距,為了行車安全,自適應(yīng)巡航即使最小的跟車距離也不會很小,在擁堵嚴重的路況下易被加塞或者強行變道。遇到加塞的時候,前車一動,自車3秒內(nèi)啟動,3秒足可以插一輛車進去,就會存在難免的追尾,可能是潛在的失效模式,要記得這一幕。如果在市區(qū)停停走走時,遇到加塞,即便碰了,那也是車車事故。那如果遇到行人或摩托呢?這屬于行人識別和行人保護兩個功能,行人識別是只識別不減速,行人保護是識別并剎車,這兩個功能是在ACC功能之外的,僅僅ACC的話,是無法識別行人的。對于市區(qū)環(huán)境,行人亂穿馬路、電動車騎到機動車道等情況時有發(fā)生,使用ACC時還是多注意剎車吧。
(2)僅作為駕駛輔助功能,突發(fā)情況難控制,切不可視為安全系統(tǒng)。道路情況較為復(fù)雜,在遇到前車急剎車或者路口突然出現(xiàn)車輛的情況下ACC系統(tǒng)很難精確控制保證安全。前車緊急制動,可能要吃虧,包括高速緊急事故,還有就是有車逆行的時候,車速太快了。ACC最大減速G值為0.35g,而一般的認為急剎車減速G值為0.8以上,也就是說緊急時刻ACC失控;前方緊急剎車或逆行,就不要等ACC的救命了,一腳剎車下去才是正理。
(3)ACC智能識別汽車,對前方車輛運載的貨物/特殊物品難以識別,當前方車輛貨物本身超出了車身尺寸時,超出來的貨物就是自車的威脅,雷達的精準識別率較低,難以保證安全。前方停車制動,自車的ACC按照預(yù)定車距剎車就有危險,就是有可能被貨物親密接觸,甚至撞擊了。
(4)目前在大多數(shù)車型的ACC,對靜態(tài)物體的處理都有些問題,對固定不動的目標無法作出反應(yīng)。ACC基于雷達對前方車輛的位置和速度的探測來保持安全的跟車距離。但由于雷達本身FOV的局限,一般它更擅長探測移動中的物體。對于雷達來說靜態(tài)物體多數(shù)就是那些道路兩側(cè)的樹木之類。ACC一般的使用場景是高速,但如果高速上前方忽然出現(xiàn)一個靜態(tài)物,系統(tǒng)通常會選擇忽略。
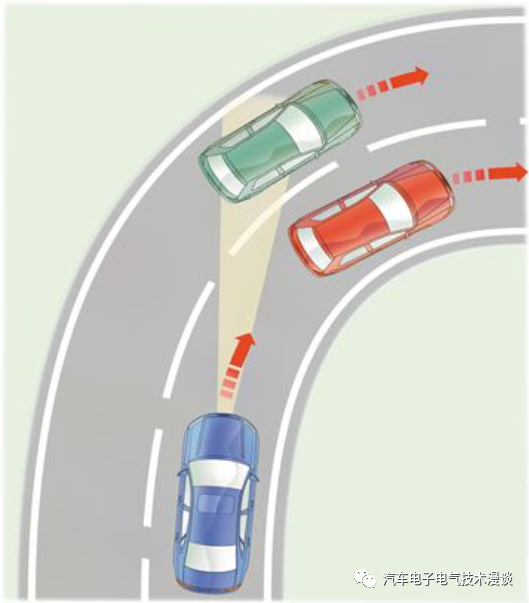
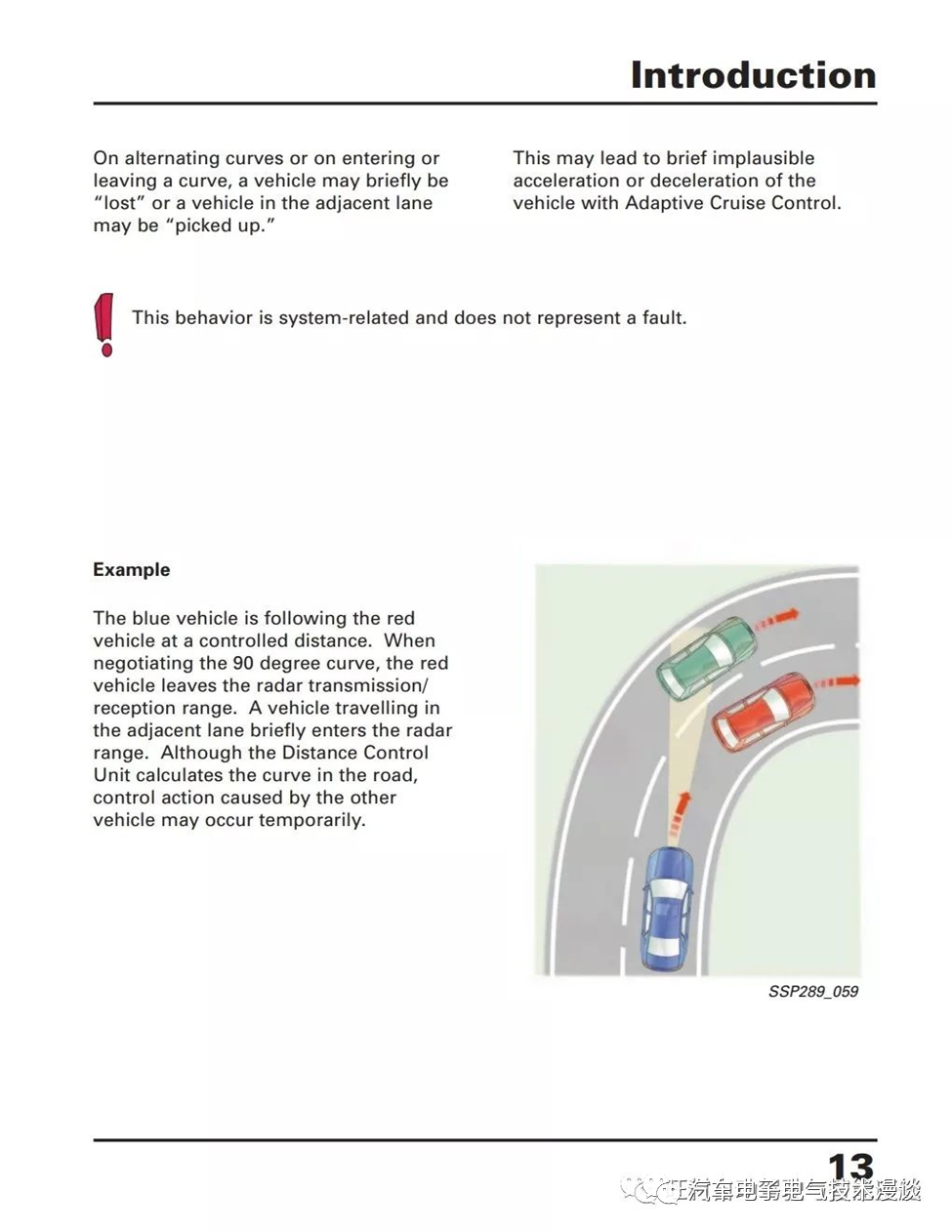
(5)大部分情況應(yīng)該是無法跟車轉(zhuǎn)彎的,90度彎和急彎應(yīng)該都是過不了的,一方面雷達探測自身的局限性,ACC只能識別前方車輛,是直線掃描,在轉(zhuǎn)彎半徑很小的情況下,由于雷達視野受限,影響系統(tǒng)功能。另一方面在路口沒有車道線,其車道保持功能也無法起作用。對于緩拐(如下匝道岔路口)和彎道(如高速小彎),ACC(實際上是車道保持系統(tǒng))可以完成小幅度的拐彎,但對于稍大的彎,車輛就有可能判斷錯車輛而出現(xiàn)短暫急加速或急減速的情況。當前方是拐彎的時候,如直接掃描的是菜地或者溝里,就歇菜了,這時候要人工識別,才最安全。所以不要指望ACC能像車隊自駕一樣跟車,只要能完成高速跟車和市區(qū)堵車跟車就已經(jīng)非常了不起了,對于拐彎的情況,還是駕駛員多多把控吧。
(6)ACC系統(tǒng)同樣復(fù)雜,它主要是根據(jù)本車與目標車輛的運動來實現(xiàn)車輛的縱向控制。舒適性與安全性是兩個關(guān)鍵考量因素,當然,在緊急情況下自然是安全性為先。基于雷達的系統(tǒng)最關(guān)鍵的就是對于誤報信息的過濾,比如在高速上超越鄰車道上行駛緩慢的車輛時,就需要避免將其識別為同車道的車輛,進行沒必要的剎車。在車輛駛?cè)胨淼罆r,因隧道壁會反射雷達波束,造成對系統(tǒng)正常調(diào)節(jié)的干擾。如果ACC總是發(fā)生類似的誤報,雖然它未必會有安全問題,但卻會影響到正常駕駛體驗。當然除了系統(tǒng)本身,還有來自不同供應(yīng)商的傳感器、轉(zhuǎn)向與制動機制等的差異也會造成系統(tǒng)表現(xiàn)的不一致。
(7)ACC系統(tǒng)的功能會受到環(huán)境因素的影響。這是因為不同的車型采用的傳感器雖然不完全一樣,雷達,紅外線,攝像頭,都有使用。但這些傳感器各有優(yōu)劣。比如雨水、浮沫以及雪泥水等異物會影響雷達和其余傳感器(攝像頭、超聲波傳感器)的工作效果。紅外線容易受到雨、雪、霧天氣的影響,而雷達則有可能受到其它波段的影響等等。這些都會影響ACC系統(tǒng)的功能發(fā)揮。
八ISO 15622-2018 自適應(yīng)巡航系統(tǒng)性能需求和測試流程
前言
國際標準化組織(ISO)是一個由國家標準機構(gòu)(ISO成員機構(gòu))組成的世界性聯(lián)合會。制定國際標準的工作通常是通過ISO技術(shù)委員會進行的。對已成立技術(shù)委員會的主題感興趣的每個成員機構(gòu)都有權(quán)派代表參加該委員會。與ISO聯(lián)系的國際組織,包括政府和非政府組織,也參與這項工作。ISO與國際電工委員會(IEC)在所有電工標準化事項上密切合作。
ISO 15622第三版取消并取代了ISO 15622:2010和ISO 22179:2009,這兩個版本在技術(shù)上已經(jīng)進行了修訂。
與前幾版相比,主要變化如下:
---ISO 15622第三版擴展了ISO22179:2009中描述的全速范圍自適應(yīng)巡航控制系統(tǒng)的性能要求和測試流程(有少量改動)。
---車載設(shè)備被允許作為獲取駕駛員指令的可能來源(set-speed-advise)。
---道路曲率分類和相關(guān)的依賴性已被刪除。
---不再禁止從保持中自動驅(qū)動車輛行駛
概述
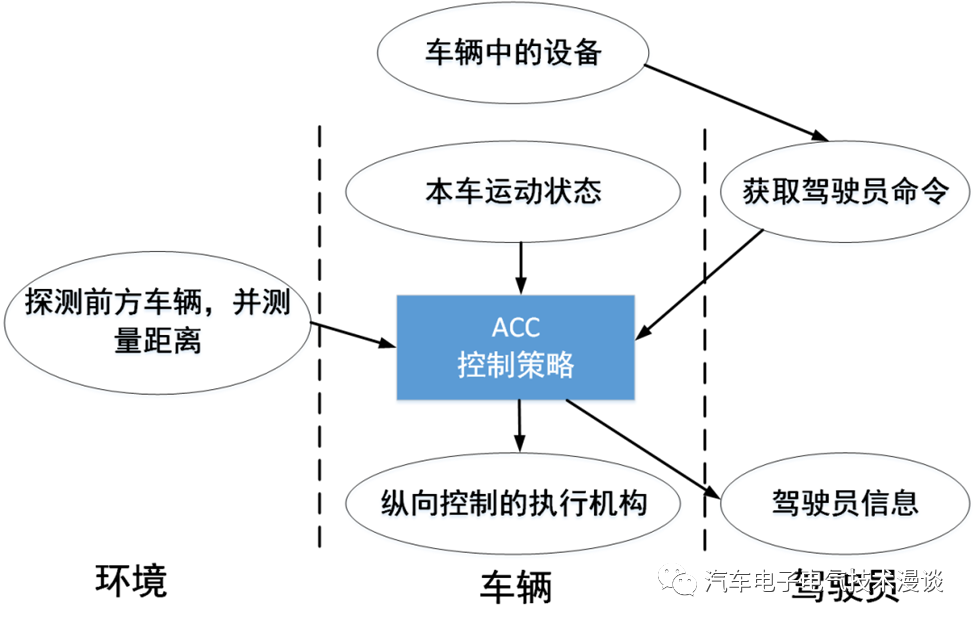
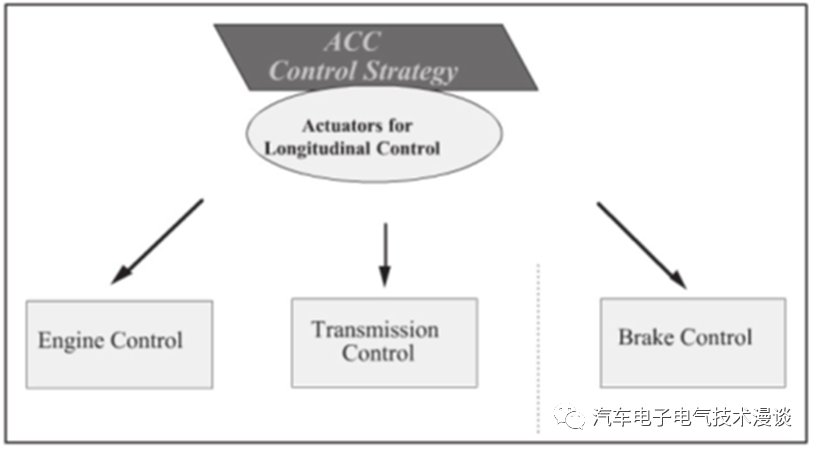
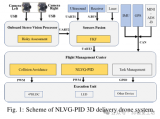
自適應(yīng)巡航控制(ACC)的主要系統(tǒng)功能是利用以下信息自適應(yīng)地控制車輛速度,以適應(yīng)前方車輛。(1)與前方車輛的距離,(2)主車(配備ACC的)車輛的運動狀態(tài),(3)駕駛員的指令(見圖1)。根據(jù)所獲得的信息,控制器(在圖1中確定為 "ACC控制策略")向執(zhí)行器發(fā)送命令以執(zhí)行其縱向控制策略,并且它還向駕駛員發(fā)送狀態(tài)信息。可選地,駕駛員可以選擇讓ACC使用來自車載設(shè)備的設(shè)定速度建議。
ACC的目標是實現(xiàn)車輛縱向控制的部分自動化,減少駕駛員的工作量,目的是為駕駛員提供方便的支持和緩解。通用的ACC系統(tǒng)包含兩類。全速范圍ACC(FSRA)和限速范圍ACC(LSRA)。
本文可被其他標準用作系統(tǒng)級標準,將ACC擴展為更詳細的標準,例如特定的探測和測距傳感器概念或更高層次的功能。因此,這里將不考慮對探測和測距傳感器功能和性能或合作解決方案的通信融合的具體要求等問題。
適用范圍
本文件包含自適應(yīng)巡航控制(ACC)系統(tǒng)的基本控制策略、最低性能要求、與駕駛員基本得交互信息、故障診斷和故障時反應(yīng)的最低要求以及性能測試流程。
自適應(yīng)巡航控制系統(tǒng)(ACC)可分為全速自適應(yīng)巡航控制系統(tǒng)(FSRA)和限速自適應(yīng)巡航控制系統(tǒng)(LSRA)兩種。自適應(yīng)巡航控制系統(tǒng)又分為兩類,即車輛配置手動或自動離合器。自適應(yīng)巡航控制的基本目的是在高速公路(禁止非機動車和行人通行的道路)上自由行駛時,為裝備的車輛提供縱向控制,對于FSRA類型的系統(tǒng)也適用于擁堵的交通狀況。ACC還可以擴展到其他功能,如前方障礙物警告。對于FSRA類型的系統(tǒng),系統(tǒng)將試圖在其有限的減速能力范圍內(nèi)停在目標車輛后面,并在駕駛員向系統(tǒng)輸入從靜止狀態(tài)恢復(fù)行駛的請求后能夠再次啟動。系統(tǒng)不需要對靜止或緩慢移動的物體作出反應(yīng)。
術(shù)語
在本文件中,適用以下術(shù)語和定義。國際標準化組織和歐共體在下列地址維持標準化使用的術(shù)語數(shù)據(jù)庫:
1.ACC制動控制:自動剎車的功能,在這種情況下,由ACC系統(tǒng)控制,而不是由駕駛員實施。
2.ACC自適應(yīng)巡航系統(tǒng):對傳統(tǒng)巡航控制系統(tǒng)的改進[見CC傳統(tǒng)巡航控制],通過控制發(fā)動機和/或動力系統(tǒng)以及可能的制動,使被測車輛以適當?shù)木嚯x跟隨前車;
3.制動:阻礙車輛運動的力
備注1:它可以是摩擦制動器(當車輛相對移動的兩部分之間的摩擦力產(chǎn)生時);電制動器(當車輛相對移動但不接觸的兩部分之間的電磁作用產(chǎn)生時);流體制動器(當位于車輛相對移動的兩部分之間的流體的作用產(chǎn)生時);發(fā)動機制動器(當力來自于人為增加的、傳遞到車輪上的發(fā)動機的制動作用時)。
備注2:根據(jù)ECE-R 13-H的定義,除本文件的規(guī)定的外,傳動控制裝置不視為制動器。
4.跟車間距c:控制車輛最前方到目標的物前車尾部面的距離。
5.CC巡航控制:能夠控制車輛按照駕駛員設(shè)定的車速行駛的系統(tǒng)。
6.前方車輛:與被控車輛同向行駛、同路行駛的車輛。
7.交通流:暢通和繁忙的交通,不包括停車和緊急制動的情況。
8.跟車時距t:計算方式為跟車間距c,除以車速υ。

τ = c/υ.
9.設(shè)定車速:所需的行駛速度,由駕駛員或ACC系統(tǒng)外部的某些控制系統(tǒng)設(shè)定。
10.穩(wěn)態(tài):所述車輛參數(shù)的值不隨時間、距離等變化的條件。
11.被控車輛:裝備了相關(guān)ACC系統(tǒng)的車輛,并與討論的系統(tǒng)相關(guān)。
12.系統(tǒng)狀態(tài):系統(tǒng)運行的幾個階段或階段之一。
12-1.ACC關(guān)閉狀態(tài):在該階段,直接訪問激活 "ACC激活狀態(tài) "被禁用。
12-2.ACC 待機狀態(tài):在此階段,ACC系統(tǒng)沒有進行縱向控制,系統(tǒng)準備由駕駛員激活。
12-3.ACC激活狀態(tài):控制車輛速度和/或跟車間距。
12-4.ACC速度控制狀態(tài):系統(tǒng)根據(jù)設(shè)定的速度控制車輛速度。
12-5.ACC跟隨控制子狀態(tài):系統(tǒng)根據(jù)選定的跟車時距控制與目標車輛的之間的跟車間距。
12-6.FSRA 保持狀態(tài):系統(tǒng)在靜止狀態(tài)下處于激活狀態(tài)。
12-7.目標車輛:被控車輛跟隨的車輛
12-8.靜止目標:被控車輛前方靜止的物體
12-9.緩慢移動的目標:被控車輛前方的物體,該物體在被控車輛中心線方向以小于MAX[1,0米/秒,被控車輛車輛速度的10%]的速度移動。
12-10.全速自適應(yīng)巡航系統(tǒng):自適應(yīng)巡航控制系統(tǒng)類別之一,通過控制發(fā)動機和/或動力系統(tǒng)和制動系統(tǒng),使本車車輛以適當?shù)木嚯x跟隨前車行駛,甚至跟隨前車到停車.
12-11.限速自適應(yīng)巡航系統(tǒng):自適應(yīng)巡航控制系統(tǒng)類別之一,通過控制發(fā)動機和(或)動力系統(tǒng)和制動系統(tǒng),使本車車輛在超過一定的最低速度以適當?shù)木嚯x跟隨前車行駛
12-12.車載設(shè)備:制造商集成的設(shè)備,在不與外部設(shè)備主動通信的情況下提供ACC設(shè)定速度值。
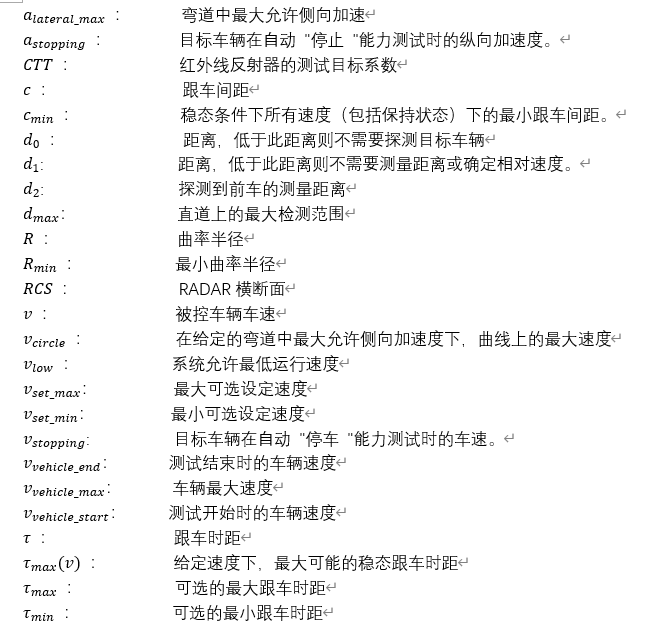
符號說明
分類
自適應(yīng)巡航控制(ACC)的縱向控制的執(zhí)行器的不同配置會有不同的系統(tǒng)行為。因此,根據(jù)兩種不同的ACC類別,本文將討論三種類型的ACC系統(tǒng)。
手動操縱離合器 可運行速度范圍
No 全速度范圍
Yes 有最低運行速度要求
No 有最低運行速度要求
性能要求
a. ACC系統(tǒng)至少應(yīng)提供以下控制策略和狀態(tài)轉(zhuǎn)換。以下是ACC系統(tǒng)的基本行為:
---當ACC激活時,應(yīng)自動控制車速,或保持與前車的間隙,或保持設(shè)定車速,以車速較低者為準。這兩個控制節(jié)點之間的變化由ACC系統(tǒng)自動完成
---穩(wěn)態(tài)跟車時距可以由系統(tǒng)自行調(diào)節(jié),也可以由駕駛員調(diào)節(jié)
---如果有一個以上的前車,應(yīng)自動選擇被跟蹤的車輛
---僅適用于FSRA型。在目標車輛停止后不超過3秒的時間內(nèi),從跟隨控制狀態(tài)轉(zhuǎn)為保持狀態(tài)
---僅適用于FSRA型。在 "保持 "狀態(tài)下,應(yīng)實現(xiàn)自動制動控制,使目標車輛保持靜止
---僅適用于LSRA型。如果主車車輛的車速低于最低運行速度Vlow,則從 "ACC stand-by "到 "ACC active "的過渡將被抑制;此外,如果系統(tǒng)處于 "ACC active "狀態(tài)時車輛的車速低于Vlow,則自動加速將被抑制,ACC系統(tǒng)可能從ACC active 變到ACC stand by 狀態(tài)
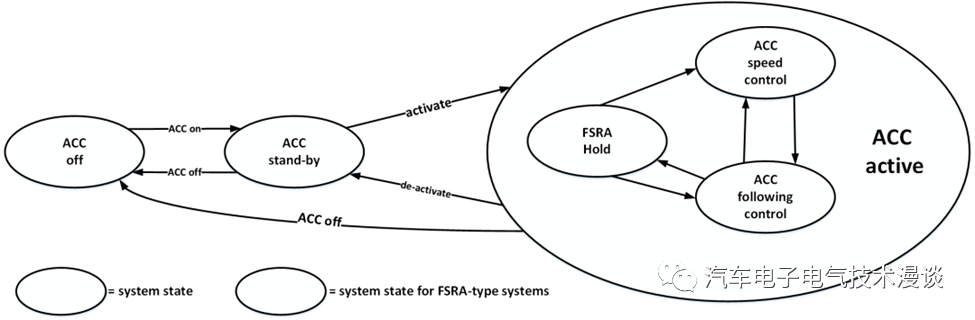
ACC狀態(tài)和轉(zhuǎn)換條件
功能需求
1. 控制模式:控制模式(跟隨控制或速度控制)之間應(yīng)自動過渡。
2. 靜止或緩慢移動的目標:一般來說,并不要求ACC系統(tǒng)對靜止或緩慢移動的目標作出反應(yīng)。如果系統(tǒng)的設(shè)計不能對靜止的目標作出反應(yīng),則至少應(yīng)在車主手冊中說明。
FSRA型系統(tǒng)和LSRA型系統(tǒng)可能會在其有限的減速能力范圍內(nèi)嘗試在已經(jīng)被跟蹤和停止的目標車輛后面停車。
---最小跟車時距應(yīng)是所有速度的穩(wěn)態(tài)條件下跟隨控制模式的最小可選擇時距.最小跟車時距應(yīng)大于或等于0.8秒。
3. 跟車能力
3.1 最小跟車時距應(yīng)是所有速度的穩(wěn)態(tài)條件下跟隨控制模式的最小可選擇時距.最小跟車時距應(yīng)大于或等于0.8秒。
3.2 速度高于8米/秒時,跟車時距至少應(yīng)設(shè)置在1.5秒至2.2秒范圍內(nèi)。在穩(wěn)態(tài)條件下,最小間隙應(yīng)為MAX(最小跟車間距,最小跟車時距*車速)。
3.3 在瞬時條件下,跟車時距可能暫時低于最小跟車時距。如果出現(xiàn)這種情況,系統(tǒng)應(yīng)調(diào)整跟車間距,以達到理想的跟車間距。
3.4 適用于所有FSRA型系統(tǒng)和LSRA型系統(tǒng),這些系統(tǒng)試圖在停止的車輛后面停止(即跟停)。作為最低要求,該系統(tǒng)應(yīng)能從穩(wěn)態(tài)跟隨開始,以低于vstopping的速度在加速度astopping下制動的逐漸停止的車輛后面停止。
vstop= 10m/sastop= -2.5m/s^2
3.5 ACC應(yīng)具有以下規(guī)定的探測范圍、目標識別和曲線能力。
3.5.1 直道上的探測范圍

---如果在距離d1至dmax范圍內(nèi)有前車存在,ACC系統(tǒng)應(yīng)測量前車與被測車輛之間的范圍。在此范圍內(nèi),前車應(yīng)在至少為被探測車輛寬度的橫向區(qū)域內(nèi)被檢測到。
dmax= tmax(Vset_max)*Vset_max
---如果前方車輛出現(xiàn)在距離d0到d1的范圍內(nèi),ACC系統(tǒng)應(yīng)檢測到該車輛的存在,但不需要測量到該車輛的距離,也不需要測量前方車輛和目標車輛之間的相對速度。
d1= 4m
---如果前方車輛出現(xiàn)的距離小于d0,則不需要ACC系統(tǒng)來檢測車輛的存在。
d0= 2m
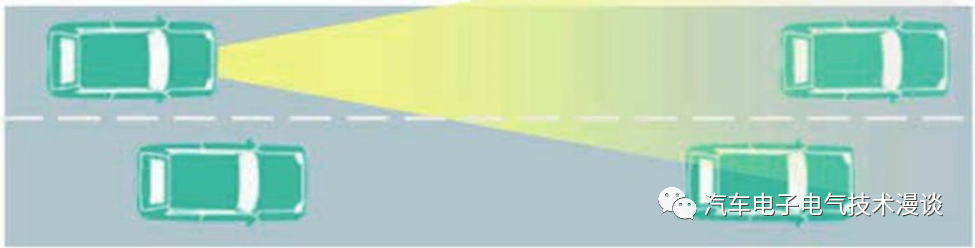
3.5.2 目標選擇能力
---如果在直線道路上和穩(wěn)態(tài)彎道上有多輛前車,則在測試場景所代表的典型ACC情況下,應(yīng)選擇本車車輛路徑上的前車進行ACC控制。
3.5.3 彎道性能
如果前車在恒定的曲線半徑Rmin上以恒定的速度Vcircle巡航,ACC系統(tǒng)應(yīng)能以穩(wěn)態(tài)時距τmax( Vcircle)跟蹤前車,其給定的跟車時距下的穩(wěn)定速度公式為:
vcircle=√(alateral_curve?Rmin)
τmax (v) 是指在直道上以v的速度行駛時可能出現(xiàn)的最大穩(wěn)態(tài)跟車時距。
alateral_curve為高速公路上彎道的設(shè)計側(cè)向加速度。
alateral_curve的值來自于曲線中的平均司機行為(95%的司機),見下圖。
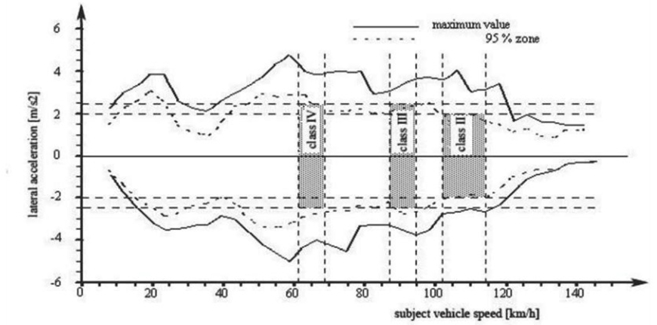
因此側(cè)向加速度的值為alateral_curve= 2.0 m/s^2時,從而得出曲線行駛的穩(wěn)態(tài)速度為Vcircle=114 km/h。
2.6Go轉(zhuǎn)換條件
從保持到跟隨控制或速度控制的過渡可以通過駕駛員請求或由ACC功能自動啟用。
人機交互性能要求
1 操作要素和系統(tǒng)反應(yīng)
1.1 ACC系統(tǒng)應(yīng)提供駕駛員選擇所需設(shè)定速度的方式。可選地,可為駕駛員提供接受車載設(shè)備(如交通標志識別系統(tǒng))建議的設(shè)定速度的手段。
1.2 在 "ACC跟隨控制 "和 "ACC速度控制 "狀態(tài)下,至少在駕駛員發(fā)起的制動力需求高于ACC發(fā)起的制動力時,駕駛員的制動應(yīng)停用ACC功能。僅適用于FSRA型:在 "ACC保持 "狀態(tài)下,駕駛員的制動不一定要退出ACC系統(tǒng)(導(dǎo)致ACC待機狀態(tài),參見圖3)。
1.3 即使在ACC系統(tǒng)自動制動的情況下,ACC系統(tǒng)也不應(yīng)導(dǎo)致對駕駛員制動輸入的制動響應(yīng)的顯著瞬時降低(參見ECE-R 13-H)。
1.4 來自駕駛員或ACC系統(tǒng)的功率需求中較大的一個將被用于驅(qū)動發(fā)動機功率執(zhí)行器(例如節(jié)氣門執(zhí)行器)。這總是賦予駕駛員抑制于ACC系統(tǒng)發(fā)動機功率控制。
如果駕駛員的動力需求大于ACC系統(tǒng)的動力需求,則應(yīng)立即釋放制動力,解除自動制動。駕駛員對加速踏板的干預(yù)不應(yīng)導(dǎo)致對駕駛員輸入的響應(yīng)有明顯延遲。
1.5 自動制動的啟動不得導(dǎo)致車輪鎖定的時間超過防抱死裝置(ABS)允許的時間。這不需要ABS系統(tǒng)。
1.6 ACC自動動力控制不應(yīng)導(dǎo)致車輪過度正滑,時間長于牽引力控制所允許的時間。這不需要牽引力控制系統(tǒng)。
1.7 ACC系統(tǒng)可根據(jù)駕駛環(huán)境(如惡劣天氣)自動調(diào)整跟車時距,而無需駕駛員采取行動。但調(diào)整后的跟車時距不得小于駕駛員選擇的最小跟車時距。
1.8 如果系統(tǒng)允許駕駛員選擇所需的跟車時距,其選擇方法應(yīng)符合以下任一條件。
1) 如果系統(tǒng)在切換到ACC OFF后保留了最后選擇的跟車時距,如圖2所示,則至少在系統(tǒng)啟動時應(yīng)將跟車時距清晰地呈現(xiàn)給駕駛員。即休眠記憶需求。
2) 如果系統(tǒng)在切換到ACC OFF后沒有保留最后選擇的跟車時距,則應(yīng)將跟車時距設(shè)置為等于1.5s或更大的預(yù)定義默認值。
1.9 如果除ACC外還有常規(guī)巡航控制功能,則ACC和常規(guī)巡航控制之間不得自動切換。
6.3.1.10 可選:即使駕駛員踩下制動踏板,該系統(tǒng)也可在靜止狀態(tài)下由駕駛員啟動。
6.3.1.11 僅適用于LSRA1型。LSRA1型系統(tǒng)應(yīng)暫時中止運行,但仍處于ACC激活狀態(tài),或者在駕駛員踩下離合器踏板時切換到ACC待機狀態(tài)。在使用離合器踏板期間,自動制動動作可以繼續(xù)進行。在系統(tǒng)松開制動器后,系統(tǒng)可以恢復(fù)ACC控制,也可以在駕駛員踩下離合器踏板的情況下過渡到ACC待機狀態(tài)。
2. 儀表顯示
---駕駛員的最小反饋信息包含激活狀態(tài)(ACC系統(tǒng)是否激活)和設(shè)定速度。
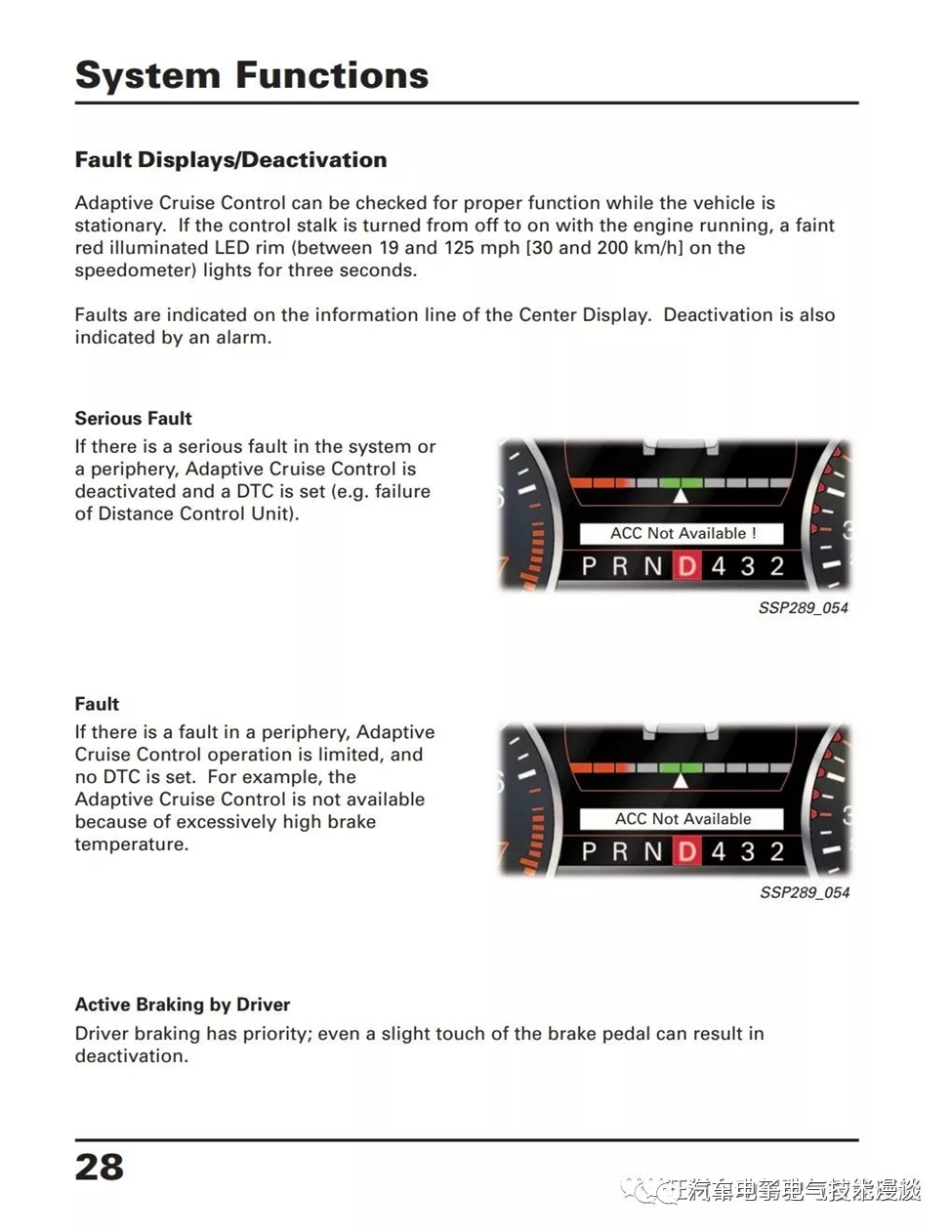
---如果ACC系統(tǒng)因故障而無法使用,則應(yīng)通知駕駛員。如果使用符號通知駕駛員,則應(yīng)使用標準符號,參見ISO 2575。
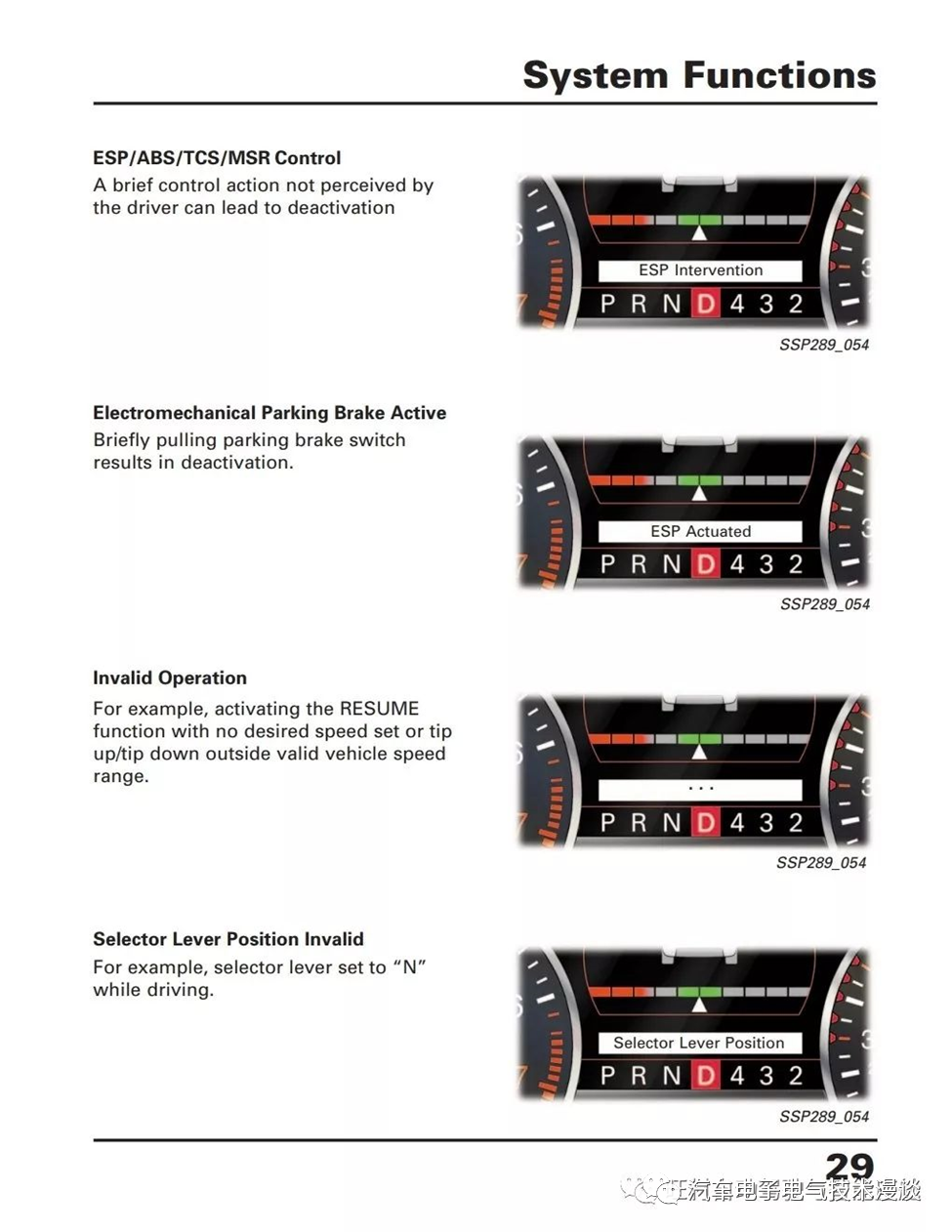
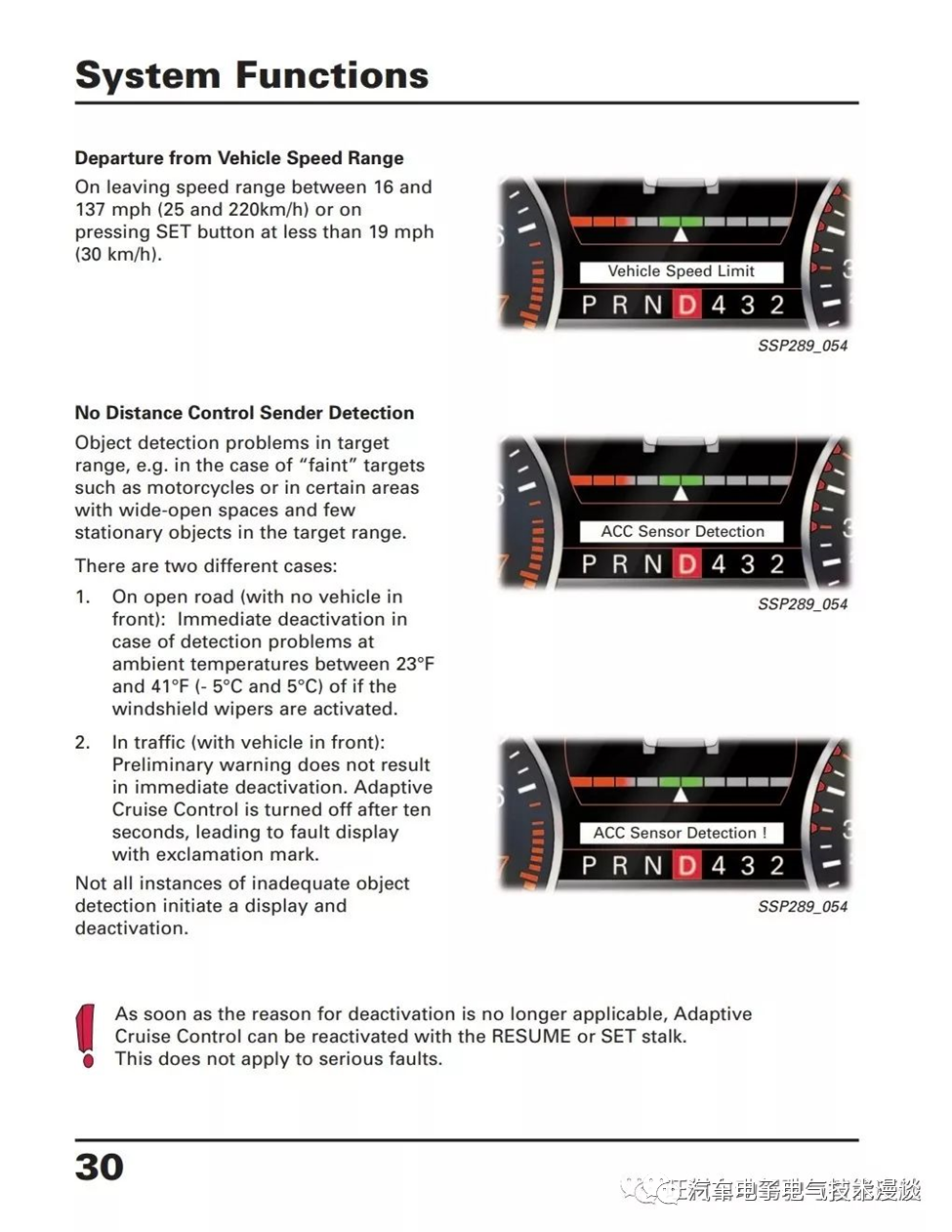
---如果ACC系統(tǒng)自動停用,則應(yīng)通知駕駛員。如果使用符號通知駕駛員,則應(yīng)使用標準符號。
---如果車輛同時配備了ACC和傳統(tǒng)的巡航控制系統(tǒng),則應(yīng)讓駕駛員知道是哪個系統(tǒng)在工作。 ---車輛探測信號,意味著主動式ACC系統(tǒng)正在檢測前方車輛,如果該前方車輛被用于適應(yīng)控制,則需要激活該信號。
系統(tǒng)操縱限制
---為了提高舒適性,在5m/s以下,不得因目標車輛消失而突然釋放制動力,也不得因制動故障以外的系統(tǒng)故障而自動失效。
---僅適用于LSRA型。ACC的自動正向加速要求車速vlow至少為5m/s。
---最小設(shè)定速度應(yīng)為vset_min>=4.4 m/s。
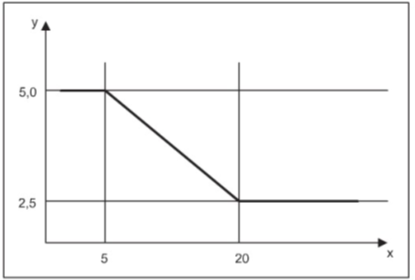
如圖所示,當車輛行駛速度高于20m/s時,ACC系統(tǒng)的平均自動減速不得超過3.5m/s^2(平均2s以上),當車輛行駛速度低于5m/s時,自動減速不得超過5m/s^2(平均2s以上)。
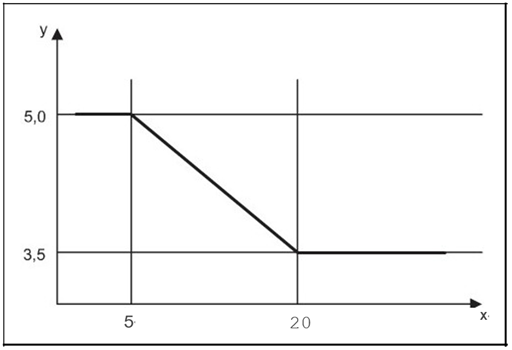
x被控車輛車速[m/s]
y 被控車輛最大減速度[m/s^2]
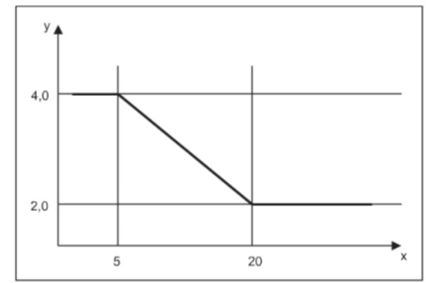
---當車輛行駛速度高于20m/s時,自動減速的平均變化率(負抖動)不得超過2.5m/s^3(平均1s),當車輛行駛速度低于5m/s時,自動減速的平均變化率不得超過5m/s^3(平均1s)。
x 被控車輛車速[m/s]
y 被控車輛最大減速度變化率[m/s^3]
---當車輛行駛速度超過20m/s時,ACC系統(tǒng)的平均自動加速度不應(yīng)超過2m/s^2(平均超過2s),當車輛行駛速度低于5m/s時,自動加速度不應(yīng)超過4m/s^2(平均超過2s)。
x 被控車輛車速[m/s]
y 被控車輛自動加速度[m/s^2]
如果目標車輛靠近到d0以上,且不再檢測到目標車輛,系統(tǒng)應(yīng)從最后一條有效制動指令開始啟動控制器策略,直到目標車輛停止或系統(tǒng)檢測到d1以內(nèi)的前車或駕駛員通過加速踏板抑制系統(tǒng)。如果在d0~d1的距離范圍內(nèi)檢測到前方車輛,且距離無法確定,系統(tǒng)應(yīng)抑制自動加速。
制動燈
如果應(yīng)用自動服務(wù)制動,制動燈應(yīng)點亮 當ACC系統(tǒng)應(yīng)用其他減速裝置時,系統(tǒng)可點亮制動燈。剎車燈應(yīng)在ACC系統(tǒng)啟動工況制動后350 ms內(nèi)點亮。為了防止刺激性的制動燈閃爍,在ACC啟動制動后,制動燈可以保持合理的時間內(nèi)亮起。
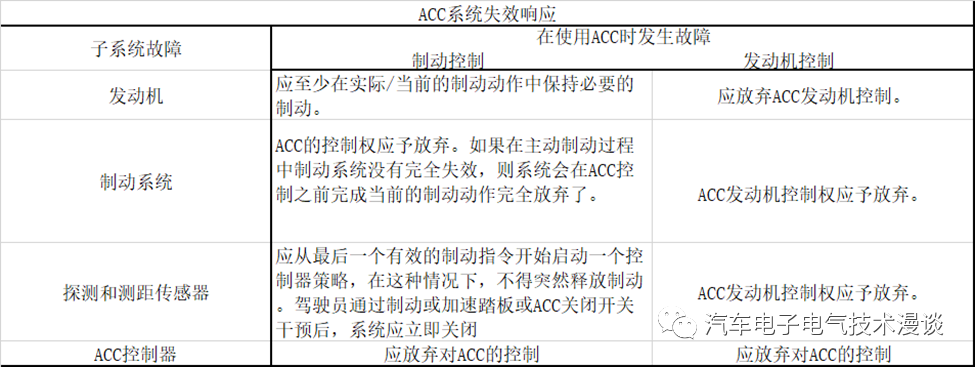
系統(tǒng)失效
---表顯示了根據(jù)哪個子系統(tǒng)發(fā)生故障所需的反應(yīng)。
---表所述的故障應(yīng)立即通知駕駛員(LSRA1型系統(tǒng)的變速箱故障除外)。在系統(tǒng)關(guān)閉之前,該通知應(yīng)保持有效。
---在點火關(guān)閉/開啟或ACC關(guān)閉/開啟的自檢成功之前,應(yīng)禁止重新啟動ACC系統(tǒng)。
九使用注意事項
有許多人都對ACC有一種籠統(tǒng)的認識:ACC就是自動巡航,可以自動加減速。從官方的各種宣傳來看,也只看到ACC給人們駕駛帶來的便利,但是,ACC并不能保證在所有的道路情況下都有效,駕駛員仍然要負責保持合適的車距和車速,并在可能發(fā)生危險時進行干預(yù)。ACC不是一個安全系統(tǒng)、障礙物探測器或者碰撞警告系統(tǒng),而是一個舒適性系統(tǒng),目的是減輕駕駛員在枯燥的駕駛中的疲勞,駕駛員必須一直保持對車輛的控制并且對車輛負有全部責任。作為最終的使用者,首先要清楚ACC在哪些情況下會失效或性能下降,這樣才能安全地去享受到ACC功能帶來的便利。
(1)ACC在自車行駛過程中,不會識別死物,對所有靜止車輛和靜態(tài)障礙物不做識別,對迎面行駛的車輛不做識別,對行人及自行車等反射截面積過小的障礙物不做識別。
(2)ACC的功能可以輔助駕駛員,但是不能代替駕駛員進行駕駛。即使ACC處在激活狀態(tài)駕駛員也必須謹慎駕駛并且需要遵守交通規(guī)則。
(3)駕駛員須依據(jù)前方車流量,當前天氣狀況,如雨天、霧天等,來調(diào)整跟車距離,對ACC系統(tǒng)進行合理設(shè)置,駕駛員需要在任何時候都保證可使車輛減速至停止狀態(tài)。
(4)ACC適合在高速公路和路況良好的道路上使用,不適合在復(fù)雜城市道路或者山路上使用。
(5)假如前方無跟車目標車輛會加速到設(shè)定速度(直角彎或環(huán)島都可能會失去識別目標此時避免開啟ACC,以防發(fā)生意外)。
(6)跟隨大型車輛時ACC雷達探頭所發(fā)出的信號掃描上廣角會被車輛所遮擋導(dǎo)致跟車距離變近。
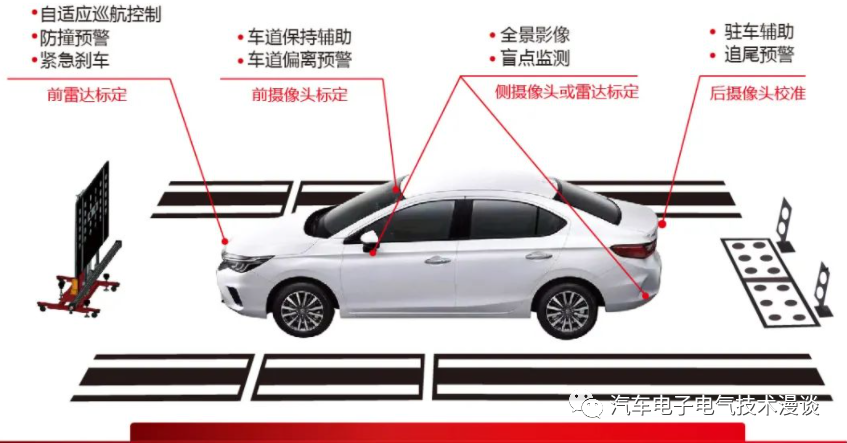
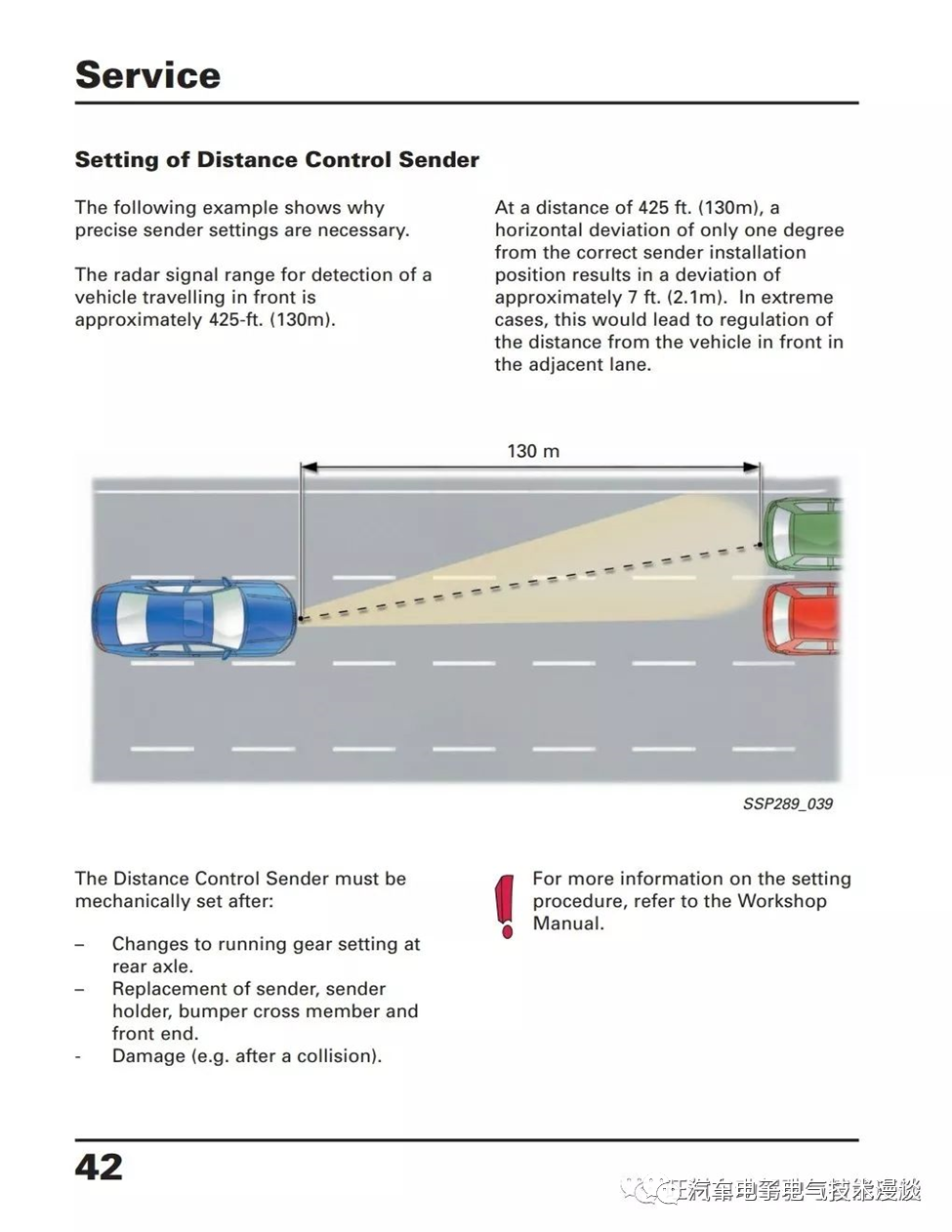
(7)拆裝或更換前保險杠、ACC傳感器、傳感器支架和汽車前蓋時,需要進行ACC標定。
自動巡航控制系統(tǒng)代替駕駛員控制車速,避免了頻繁的取消和設(shè)定巡航控制,使巡航系統(tǒng)適合于更多的路況,而駕駛?cè)藛T完全可以將腳從踏板上移開,只要關(guān)注于方向盤即可,能大幅降低長途駕駛所帶來的疲勞,為駕駛者提供了一種更輕松的駕駛方式。目前出現(xiàn)在國內(nèi)的自適應(yīng)系統(tǒng)只能“自適應(yīng)剎車”,還有很大的發(fā)展空間。
自適應(yīng)巡航設(shè)計初衷是減輕駕駛員長途駕駛的疲勞,極為復(fù)雜的城市路況并不是它發(fā)揮作用的地方。雖然現(xiàn)在的自適應(yīng)巡航系統(tǒng)具備了根據(jù)前車情況、根據(jù)路況減速,甚至是剎停的功能,不過其不是依據(jù)主動駕駛功能而開發(fā)。換言之,這套系統(tǒng)的減速與剎車停止功能判斷邏輯并不是以應(yīng)付城市中復(fù)雜的低速路況而研發(fā)的。請牢記:它只是減低高速行駛時的疲勞感,而非永久解放人雙手的功能!
ACC僅在一定車速范圍內(nèi)才能實施調(diào)節(jié)。ACC系統(tǒng)一般在本車車速大于25km/h時才會起作用,而當車速降低到25km/h以下時,就需要駕駛者進行人工控制。通過系統(tǒng)軟件的升級,可以實現(xiàn)“停車/起步”功能。一般在車速大于40km/h時啟動主動制動的功能,能夠有效避免高車速下的追尾事故,提高安全性。
ACC安全與否是一個中立的問題,回答也是中立的,正是因為安全,所以車企才會將此功能開放給客戶,但又是不安全的,不安全的因素也很多,如惡劣天氣、加塞判斷不夠靈敏、剎車不夠及時或力度不夠大、前方掛車異行物體判斷錯誤等,同時更有駕駛員自身因素,使用ACC時沒有保持警惕,甚至忽略了ACC的報警等。總的來說,建議在路況良好的情況下使用ACC,享受舒適的同時保持警惕,右腳依然不能離開剎車,該剎車時還是要自己主動剎車,這才是ACC正確的使用姿勢。
ACC給駕駛者帶了諸多便利,但是在享受便利的同時,駕駛者并不能放松警惕,畢竟ACC仍然還只是駕駛輔助,并沒有達到完全自動的水平,哪怕只是跟車這個簡單的動作,ACC系統(tǒng)還是存在許多局限性。安全駕駛,控制車距和車速,永遠是現(xiàn)階段駕駛者的責任!
十典型應(yīng)用
目前,汽車ACC系統(tǒng)在中高級轎車上得到了廣泛的應(yīng)用。
1.沃爾沃汽車ACC系統(tǒng)
如下圖所示,通過設(shè)置在前風擋玻璃的攝像頭以及隱藏在前格柵內(nèi)的雷達來監(jiān)測前方路況,在速度超過30km/h時,按下轉(zhuǎn)向盤上的啟動鍵,就可以激活A(yù)CC系統(tǒng)。當前面有車時,車輛自動跟著前車行駛,但不會超過設(shè)定的速度;如果前方?jīng)]有車輛,就按設(shè)定的速度行駛。

沃爾沃汽車ACC系統(tǒng)具有以下功能:
① 它在0~200km/h的范圍內(nèi)都可以實現(xiàn)自動跟車。
② 對前車的識別能力強。當前車轉(zhuǎn)彎或超過前車時,能快速捕捉到新的前車,繼續(xù)自動跟車。
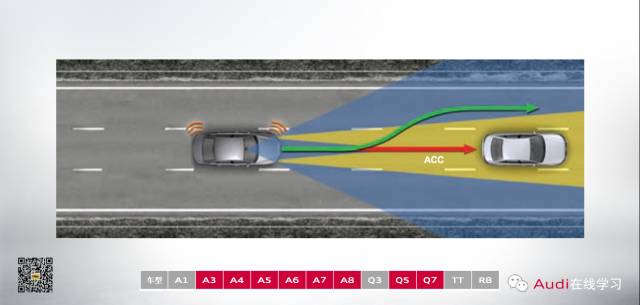
③ 如果有車輛插隊駛?cè)雰绍囍g,ACC系統(tǒng)會調(diào)節(jié)車速以保持之前設(shè)定的兩車之間的安全距離。
④ 具有輔助超車功能。如果感覺前車較慢,當駕駛員打轉(zhuǎn)向進入另外一條車道準備超車時,車輛會做瞬時加速以盡快超過前車。
2.奧迪A8 ACC系統(tǒng)
2002年,奧迪首次在全新一代奧迪A8(D3)的車上配備了自適應(yīng)巡航控制系統(tǒng)。
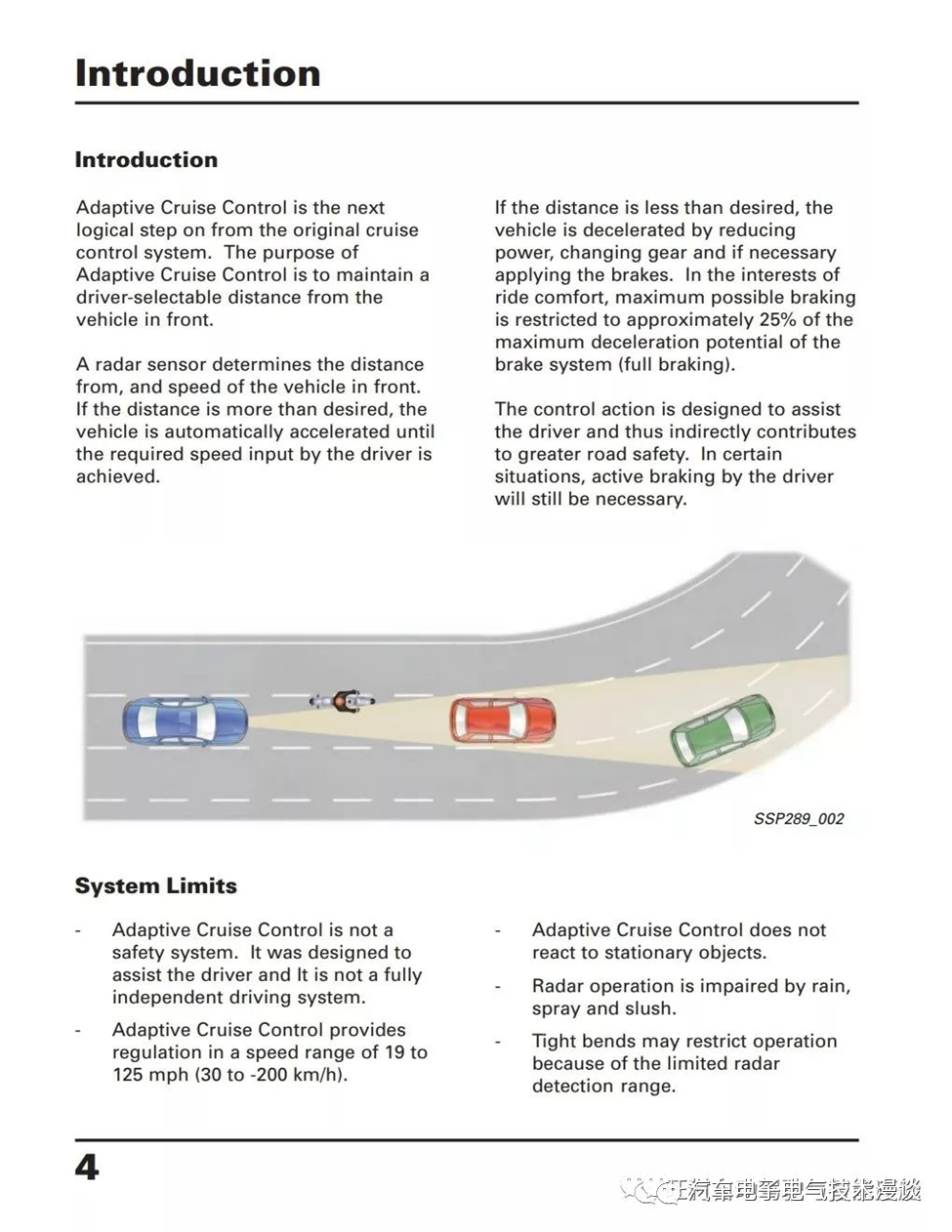
自適應(yīng)巡航控制系統(tǒng)也被稱為主動巡航系統(tǒng)。相對于定速巡航裝置,ACC不僅可以讓車輛保持一定車速的行駛,而且還能根據(jù)與前車的距離自動調(diào)節(jié)車速,以此保證兩者在最佳的安全距離內(nèi)。
(1)ACC如何工作呢?
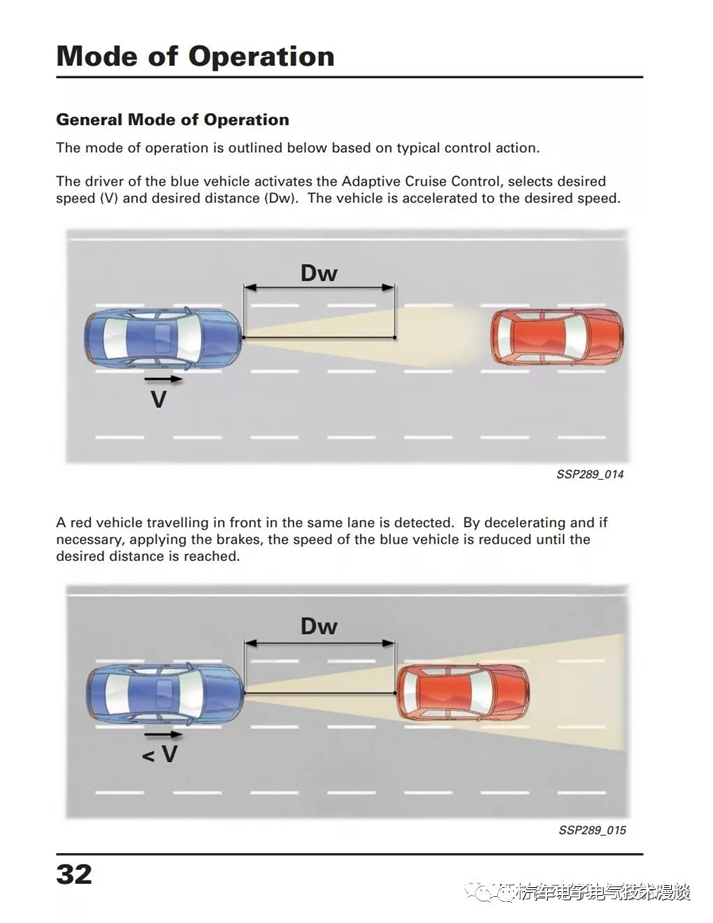
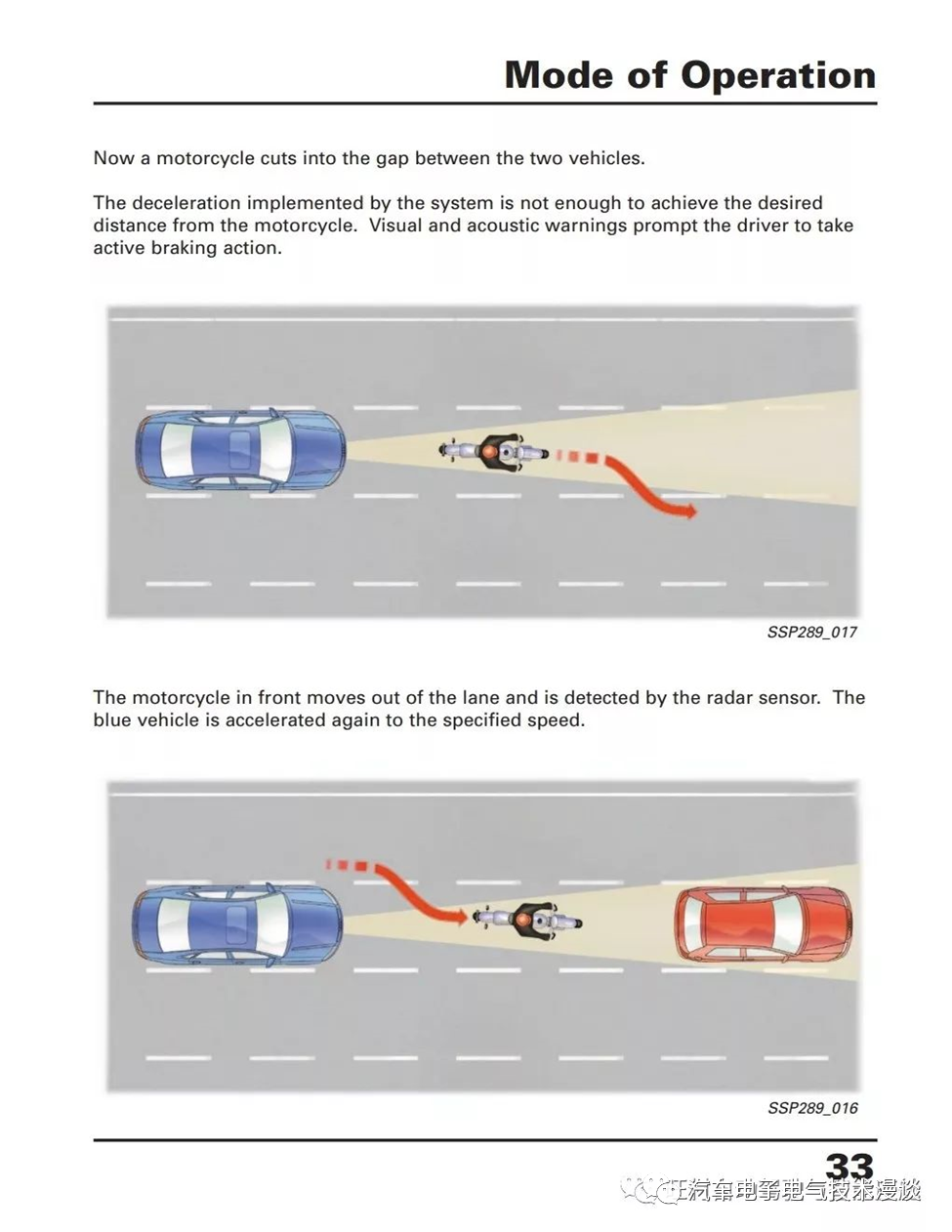
當車道暢行無阻時,ACC起著定速巡航裝置的作用,可以將車速持續(xù)保持在設(shè)定的水平。如果接近前車,則自適應(yīng)巡航控制系統(tǒng)自動制動到與前車車速相同,然后保持設(shè)定的距離。一旦識別到前方?jīng)]有行駛汽車,自適應(yīng)巡航控制系統(tǒng)便加速到設(shè)定的速度。
對于在售車型當中,現(xiàn)在有A3、A4L、A5、A6L、A7、A8L、Q5和Q7可以選裝奧迪自適應(yīng)巡航控制系統(tǒng)。
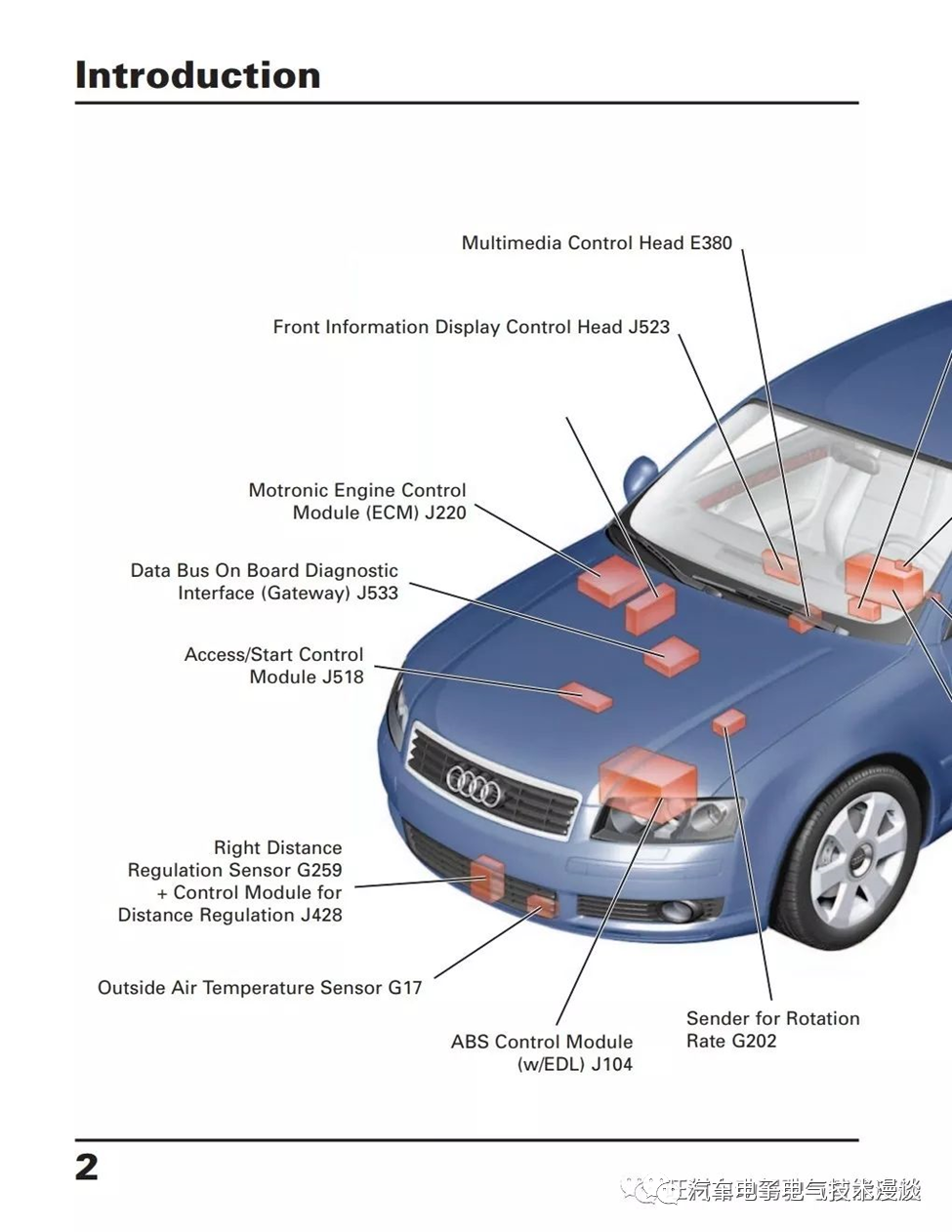
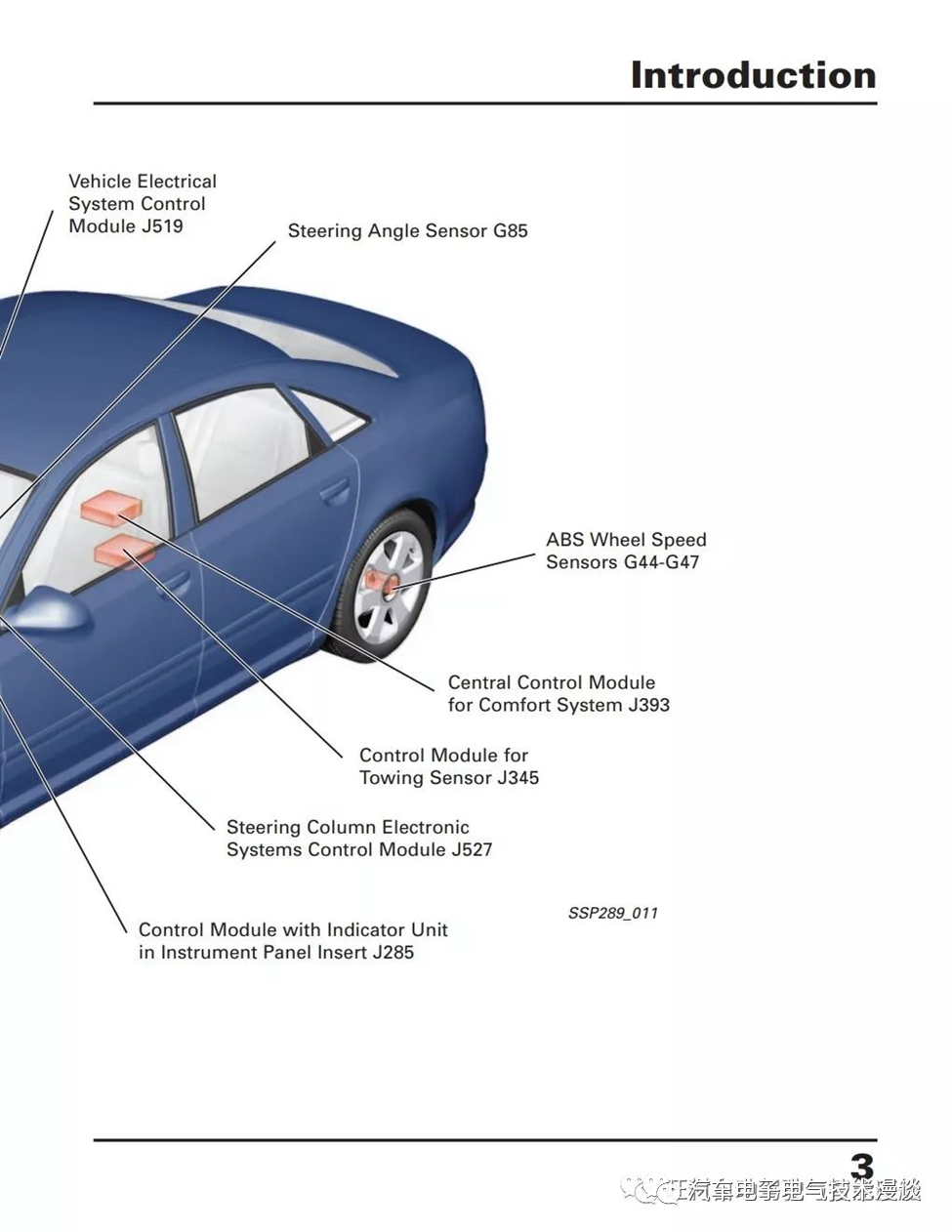
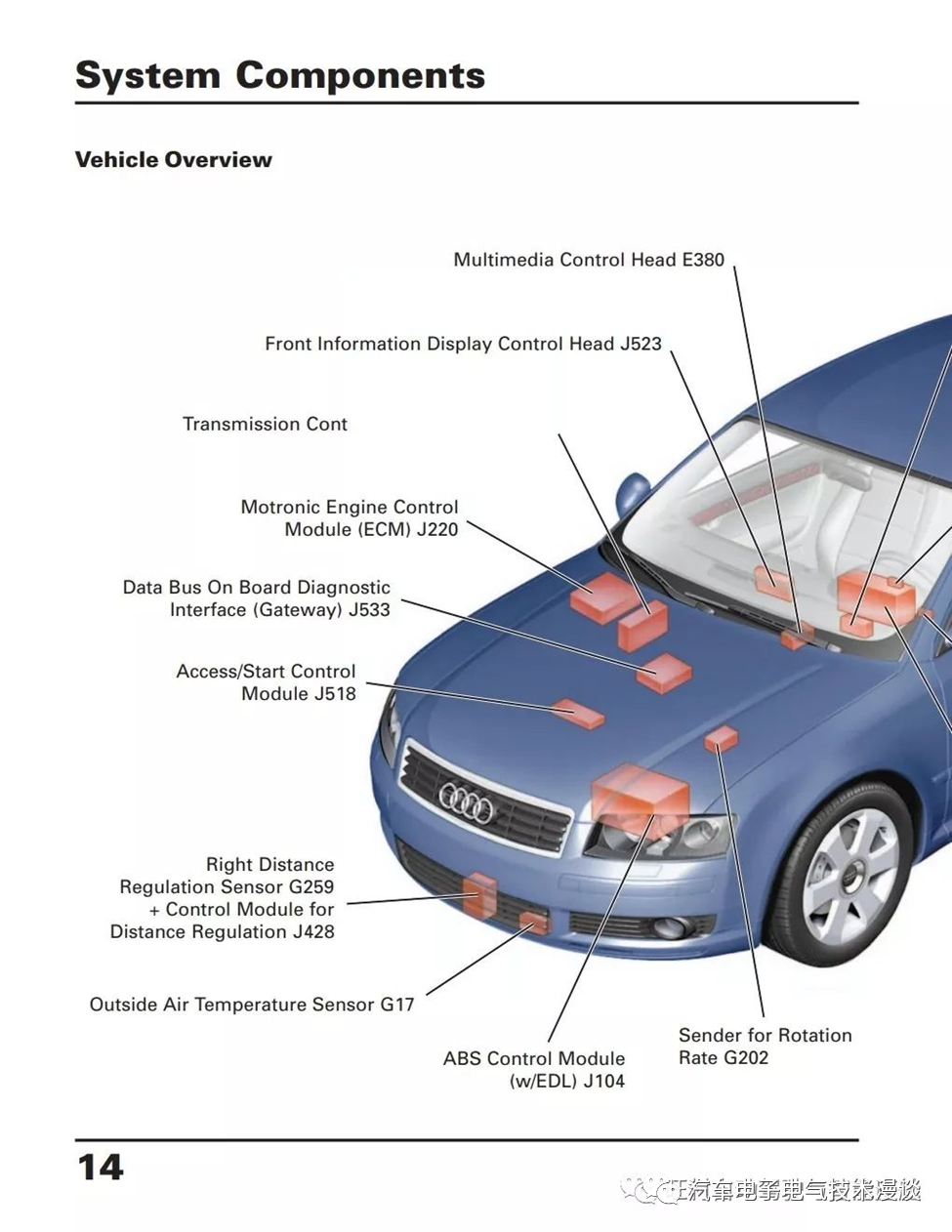
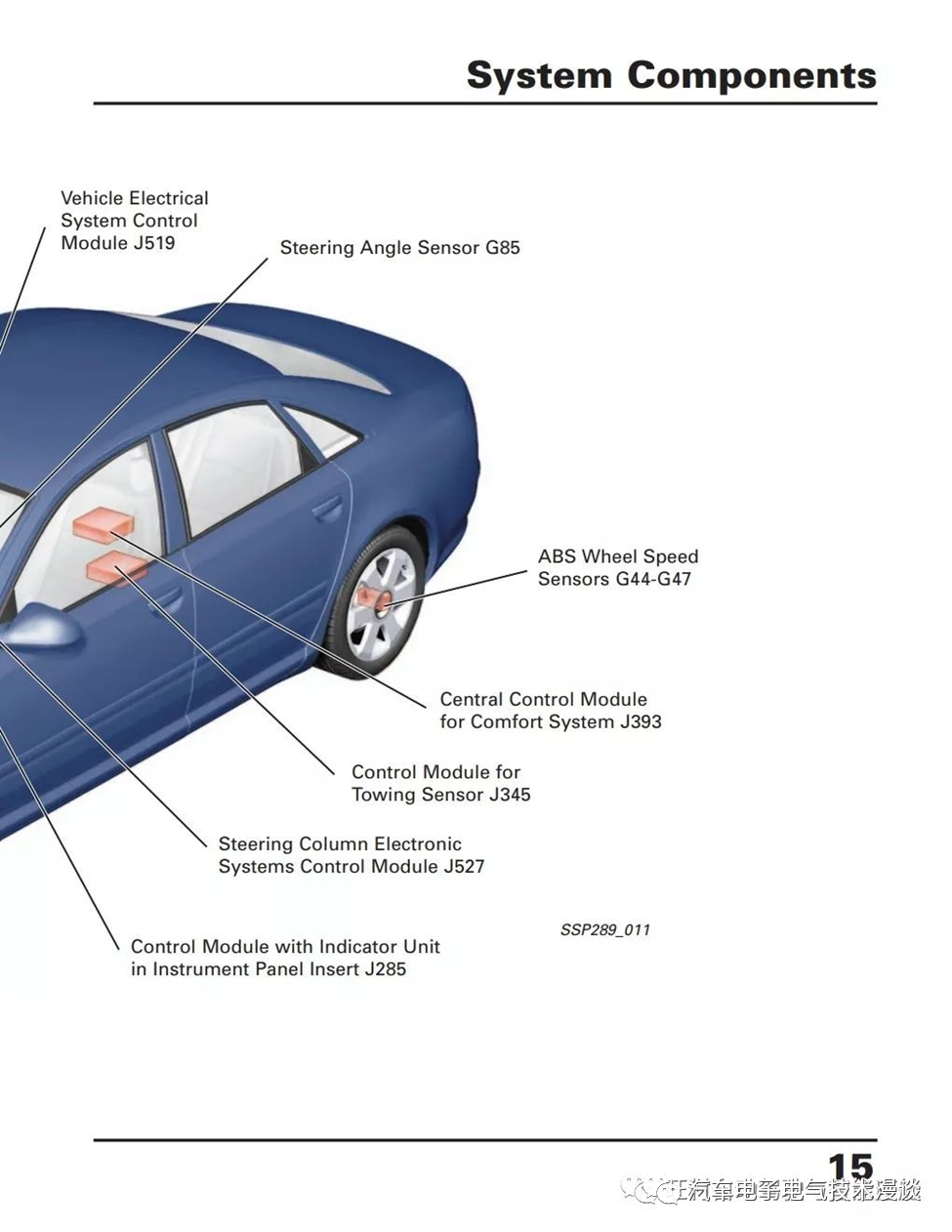
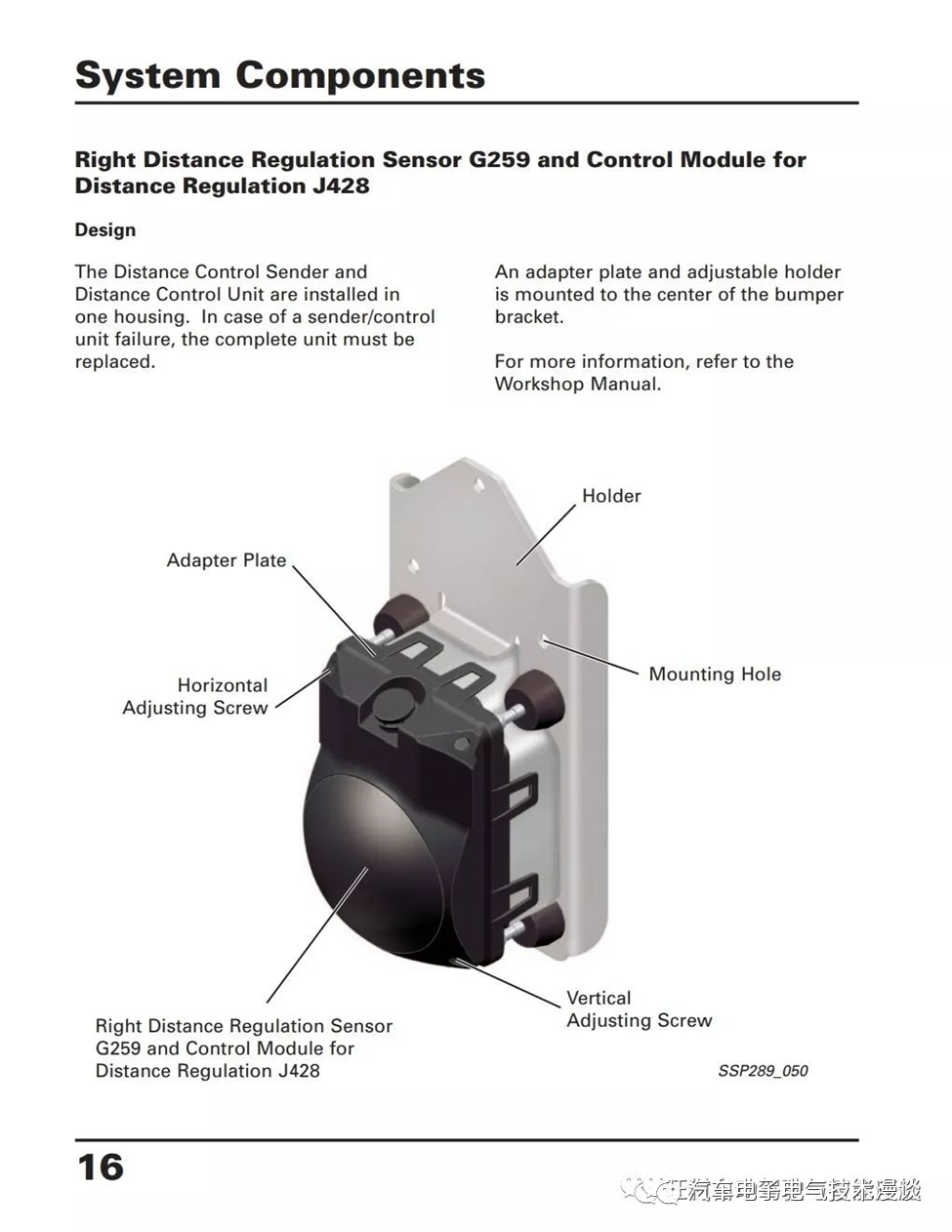
(二)組成
(3)ACC工作原理

要想實現(xiàn)上述的基本功能,系統(tǒng)必須要獲取三個信息:
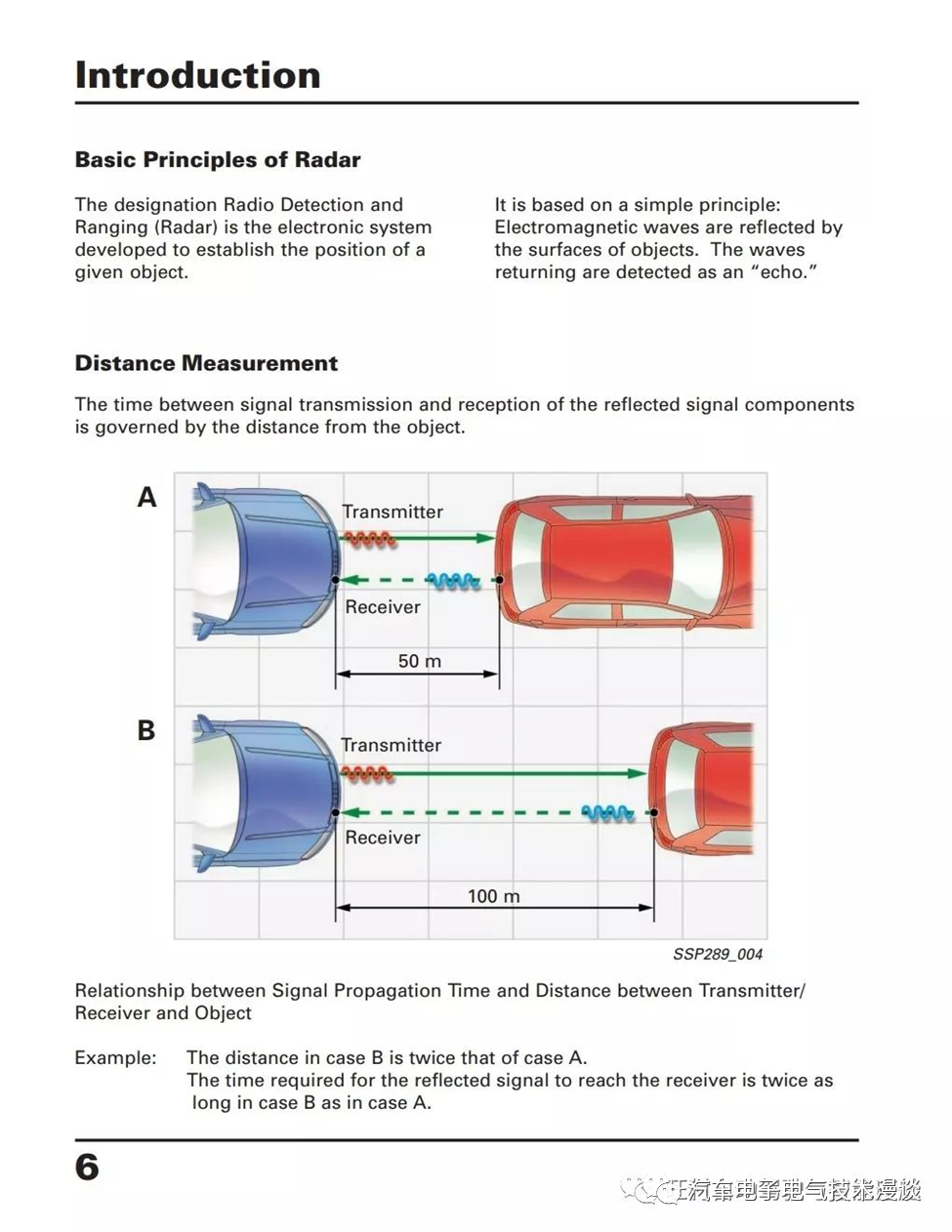
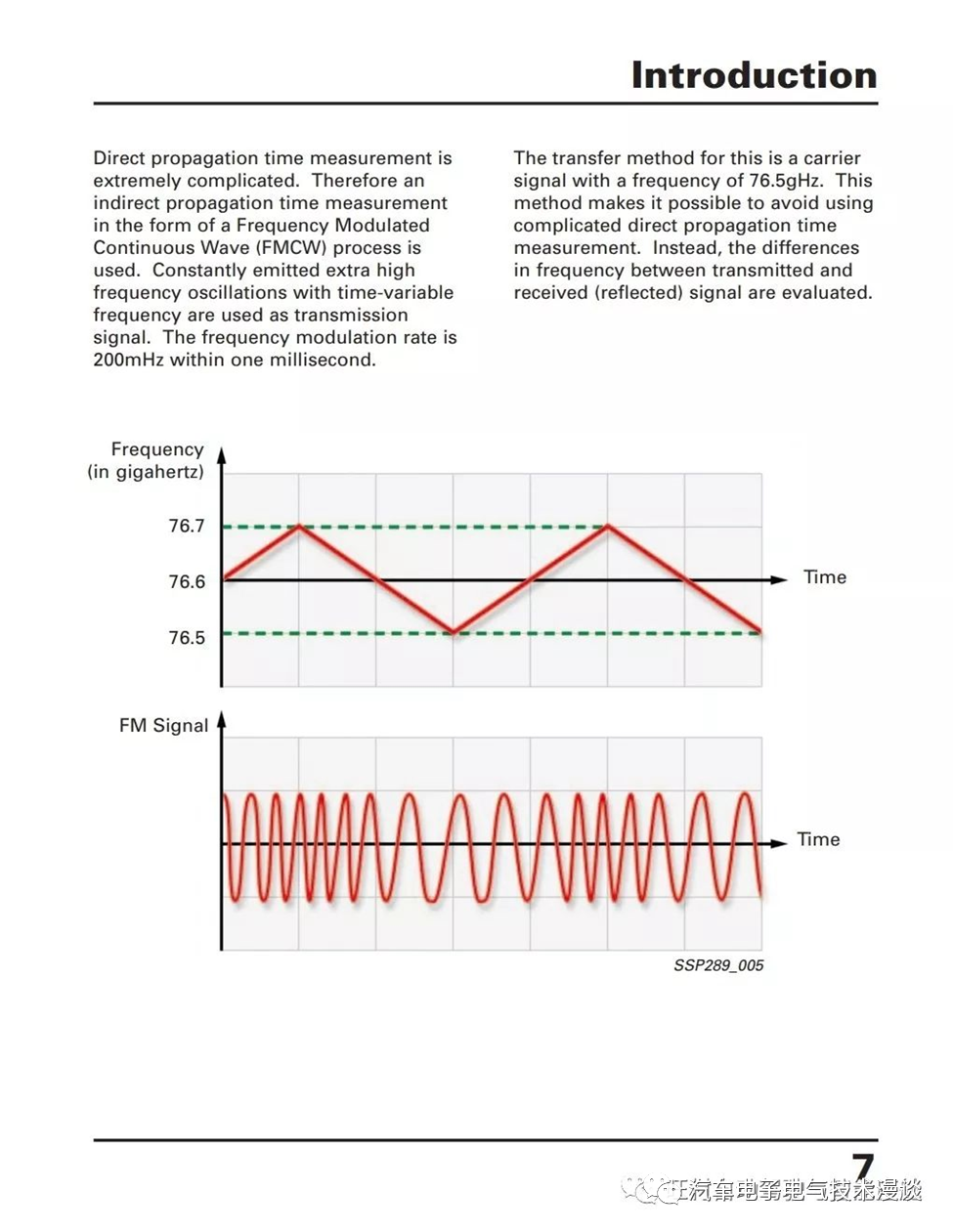
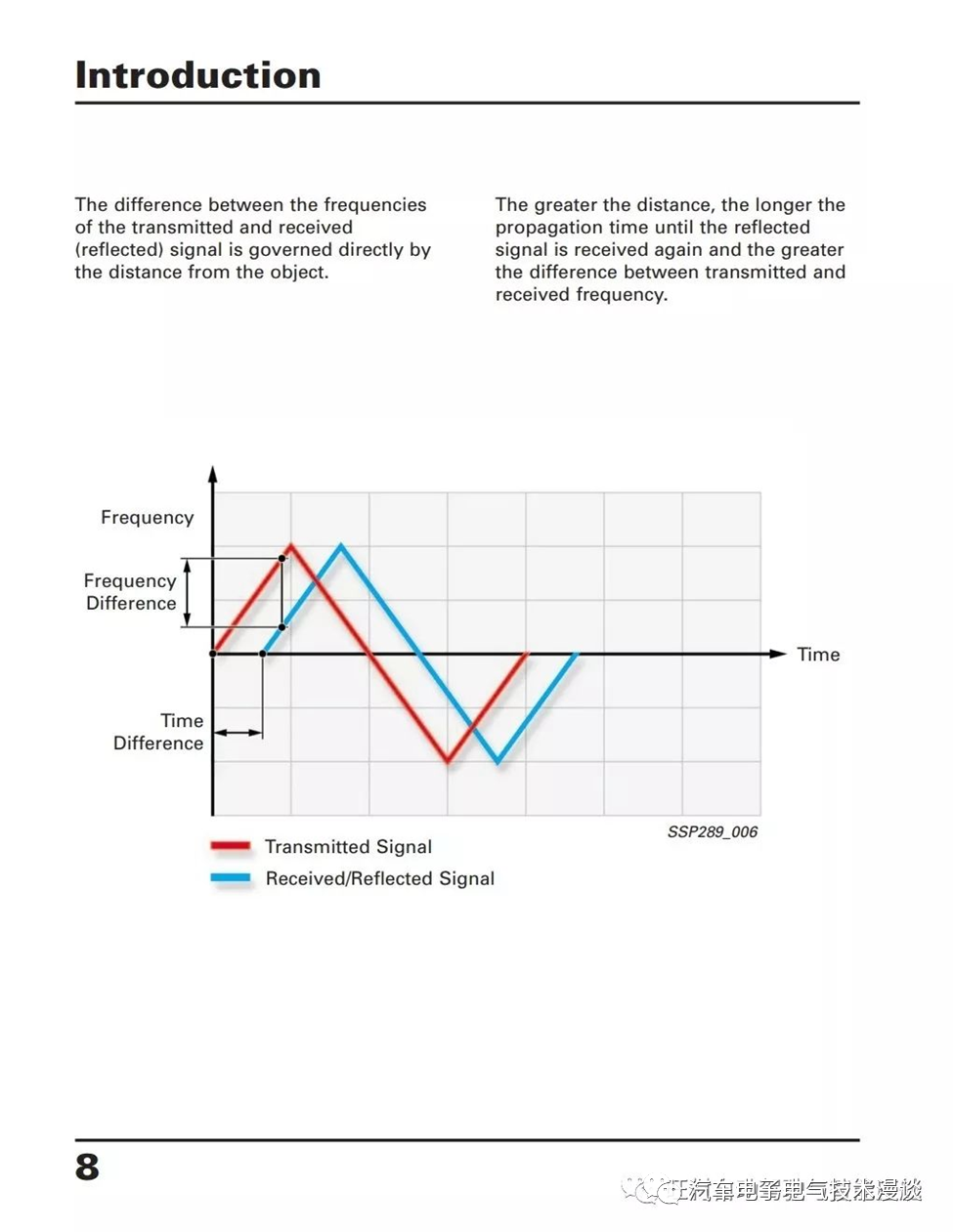
距前方車輛的距離(根據(jù)發(fā)送信號與接收信號之間的頻率差)
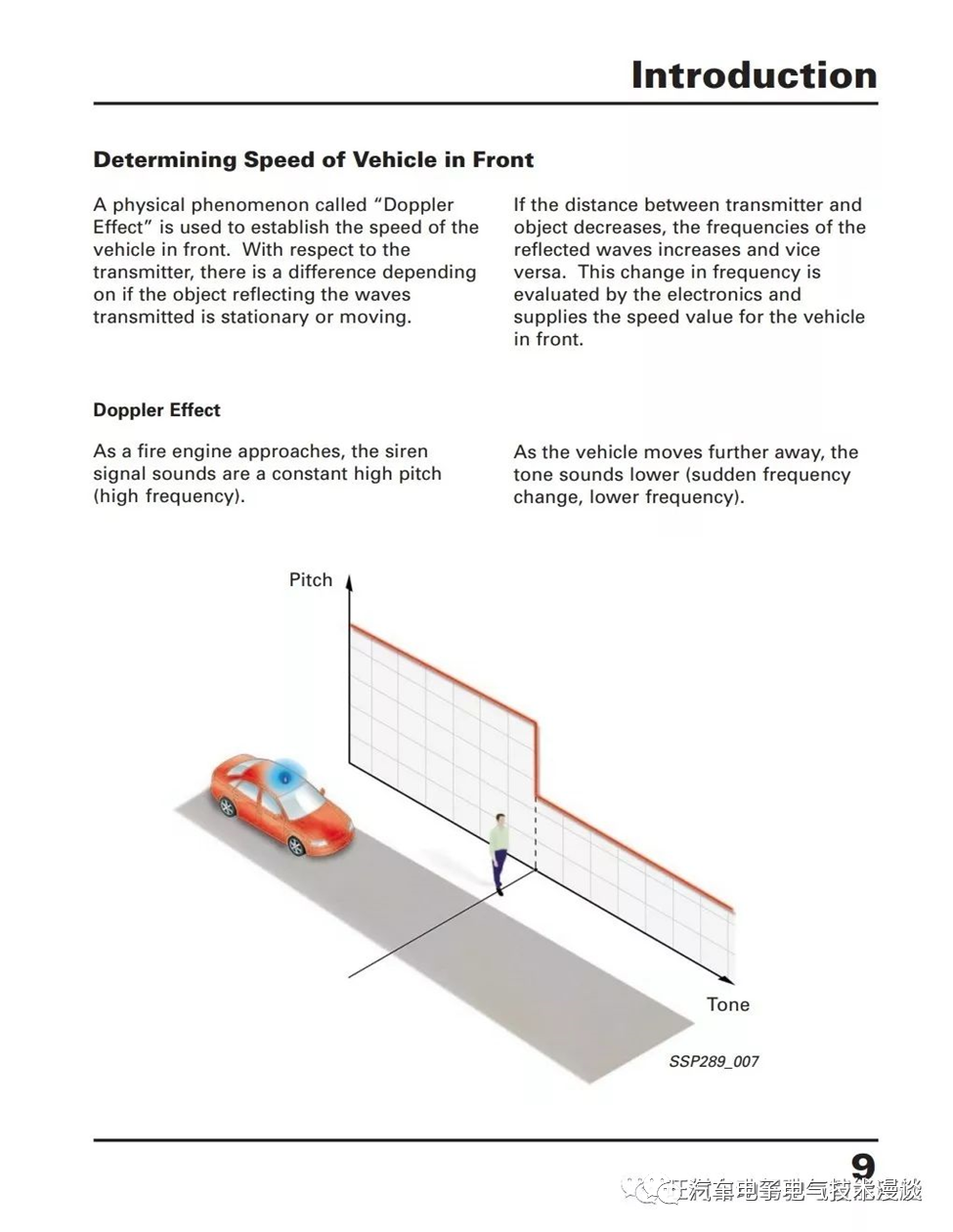
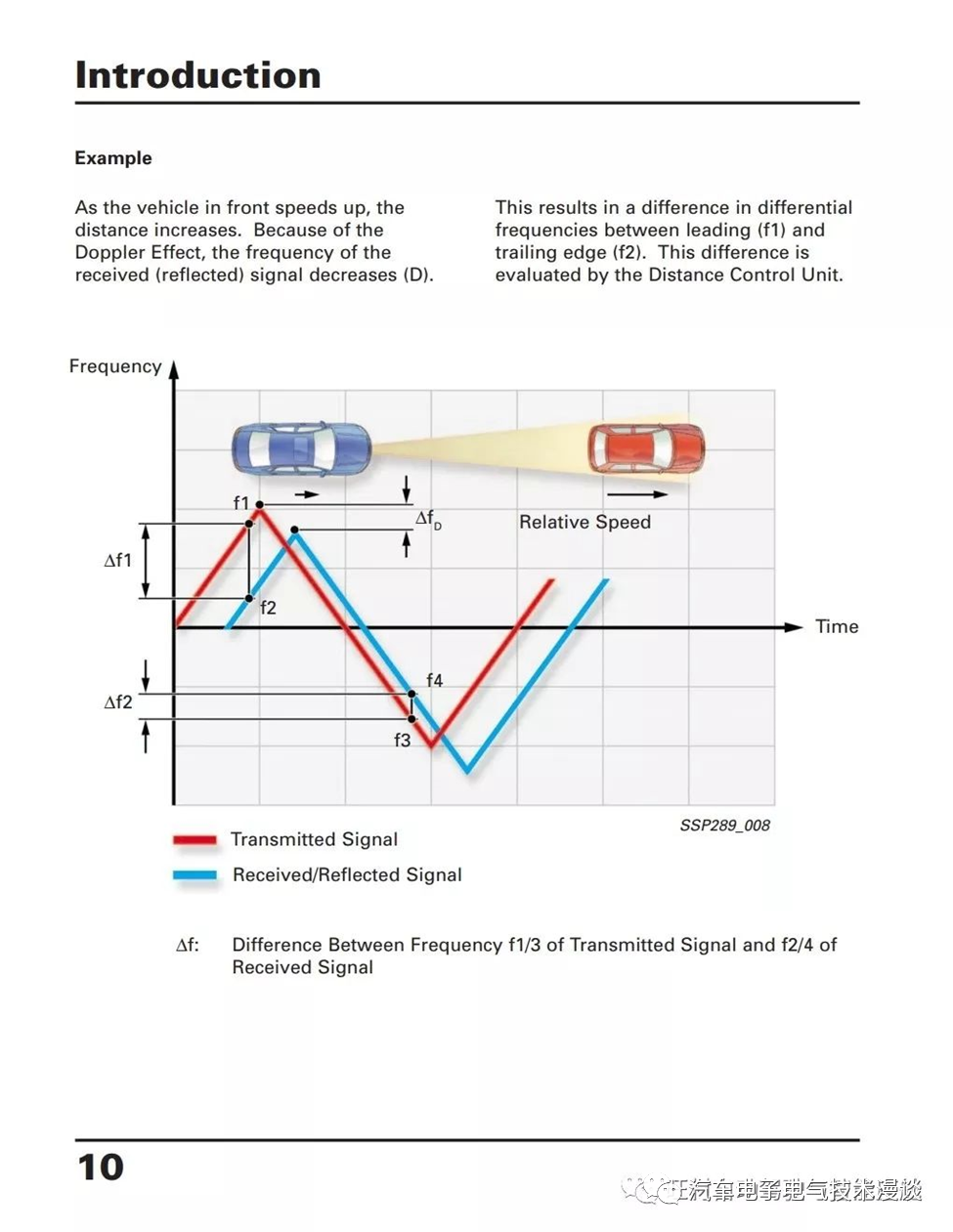
前方車輛的速度(使用多普勒效應(yīng))
前方車輛的位置(根據(jù)信號發(fā)射角度)
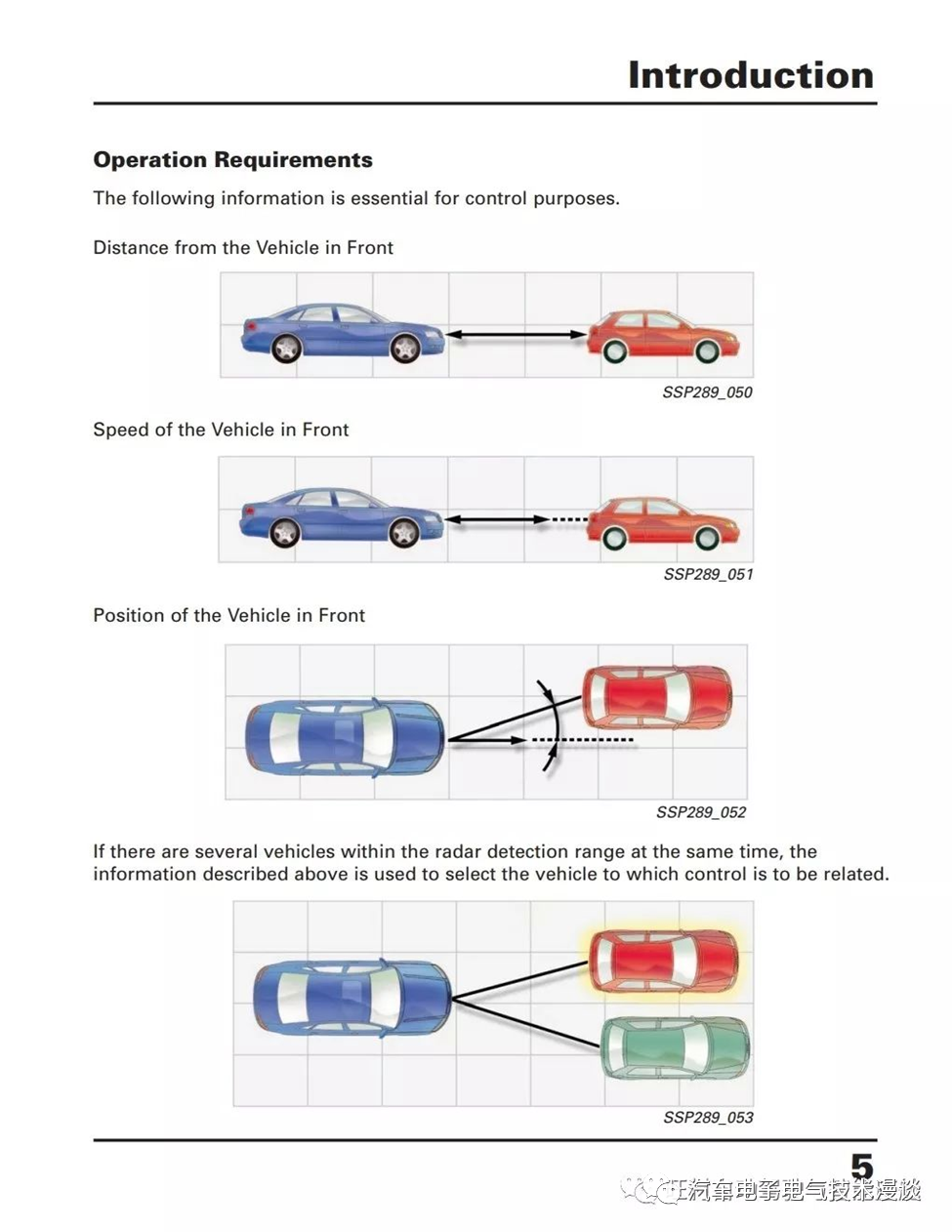
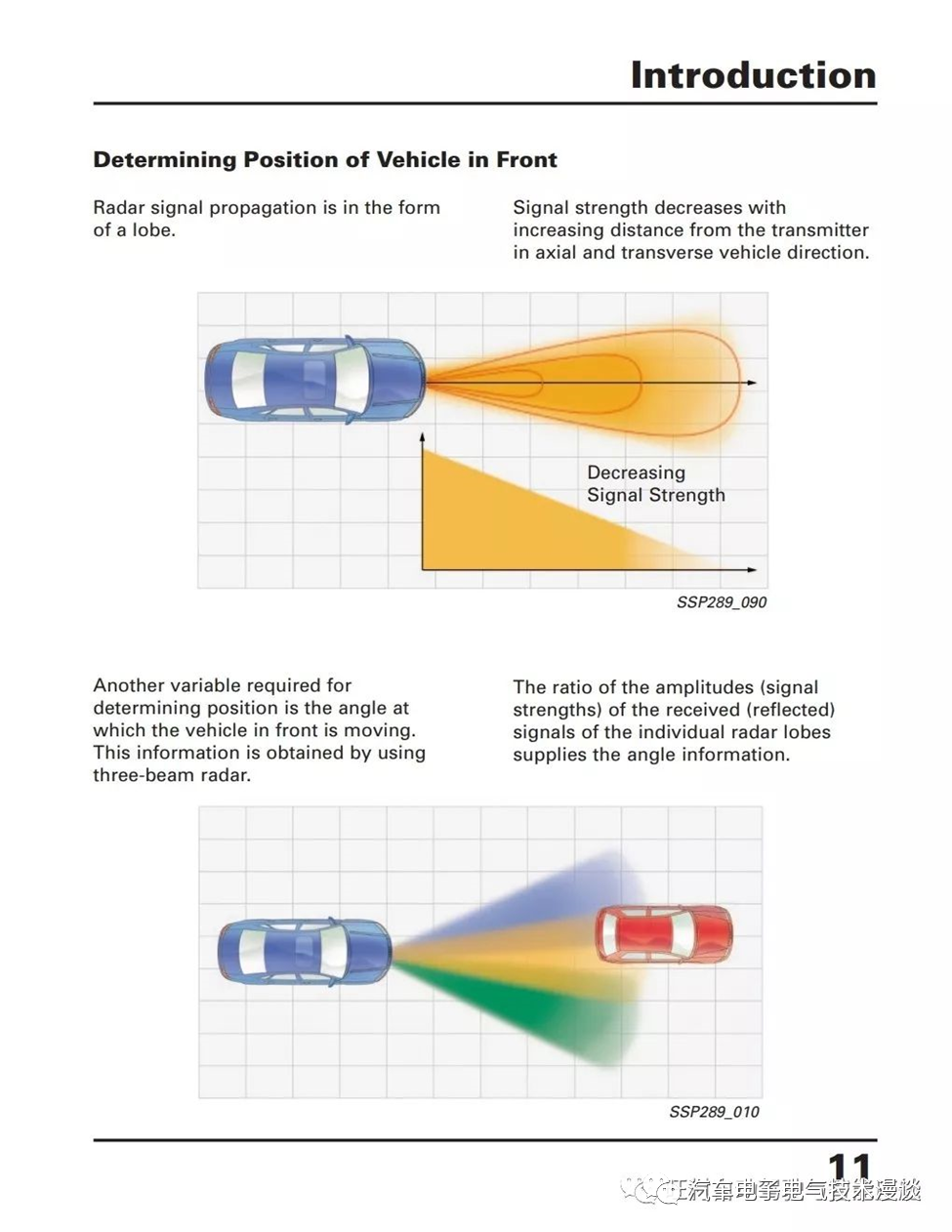

而這些信息是使用雷達技術(shù)實現(xiàn)的,然后控制器根據(jù)這些信息再進行確定選擇需要監(jiān)控的車輛。
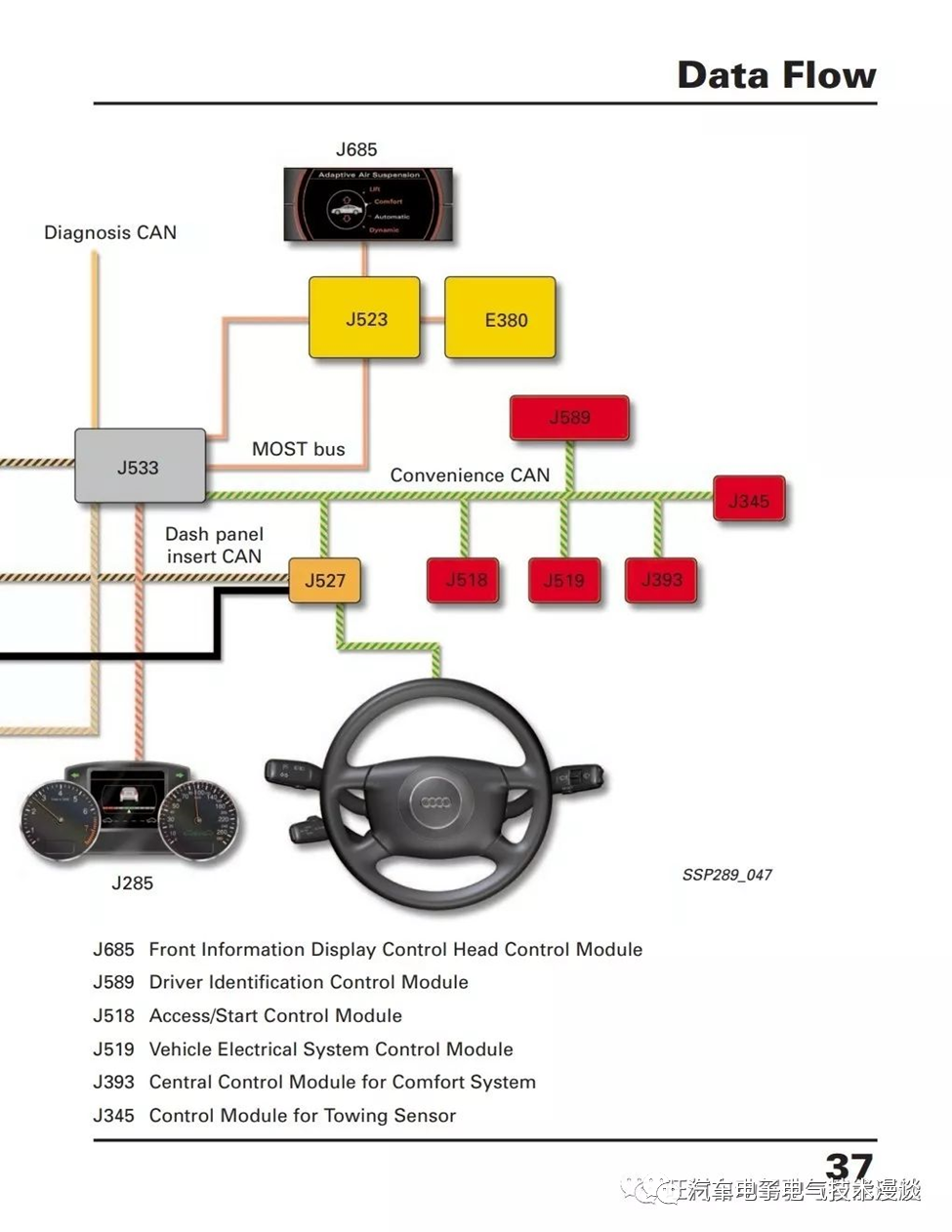
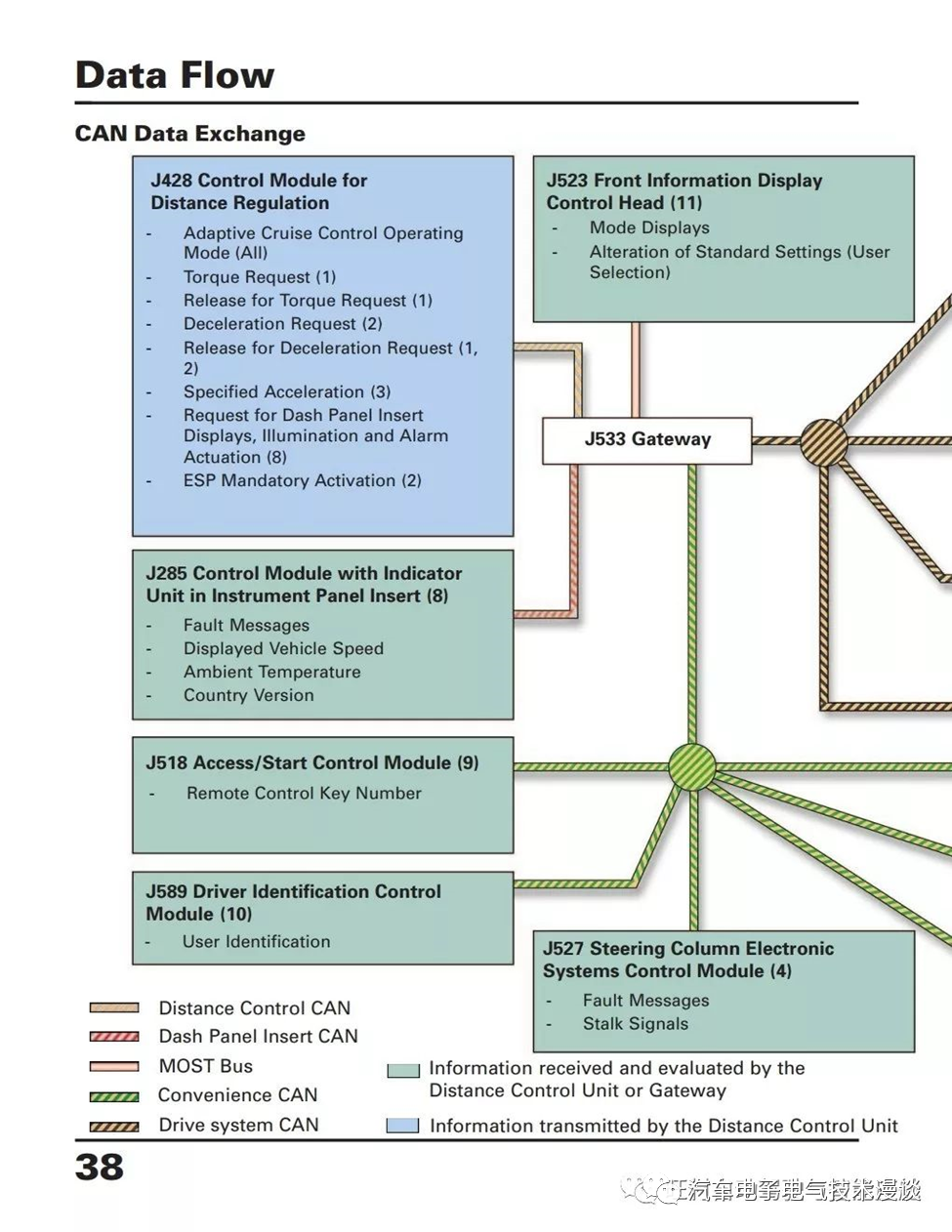
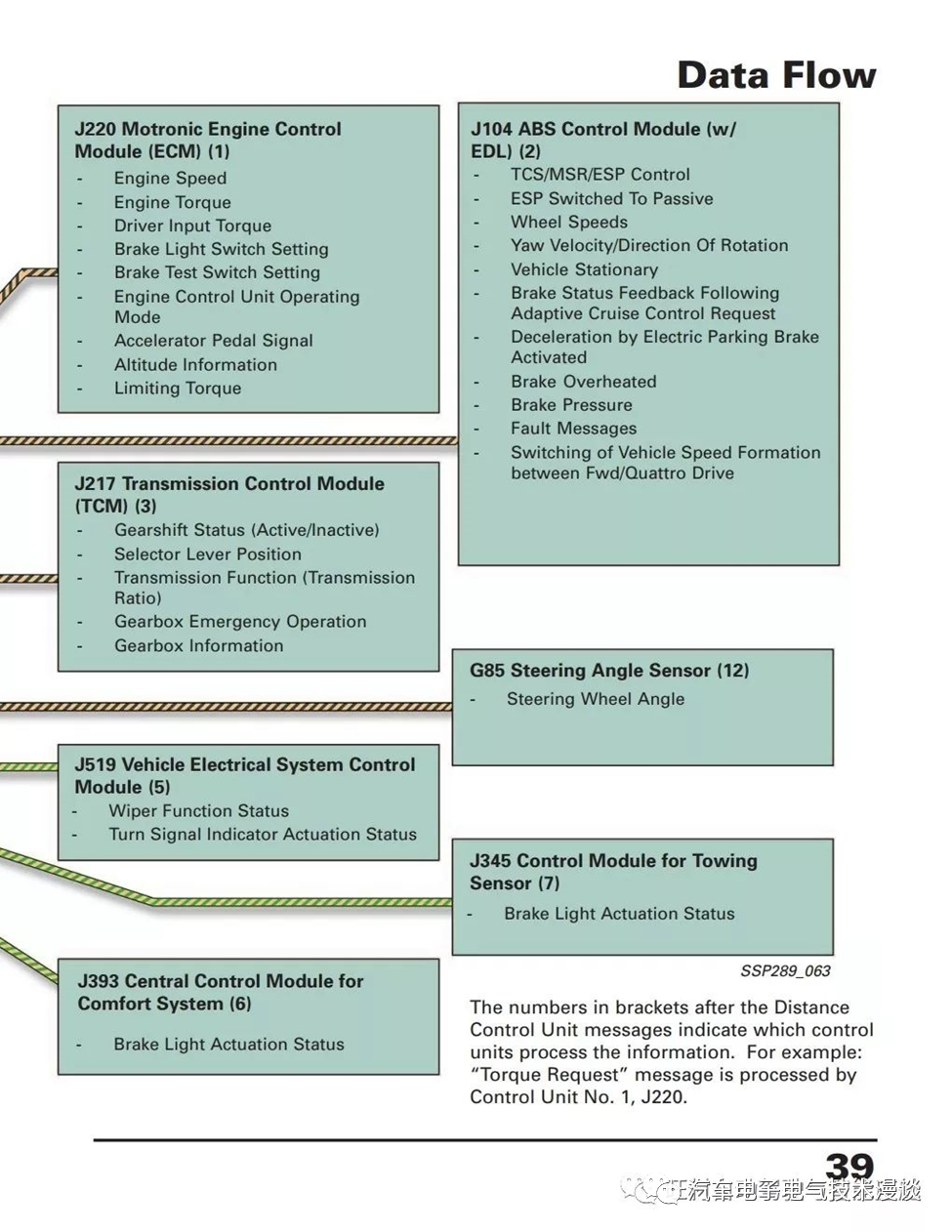
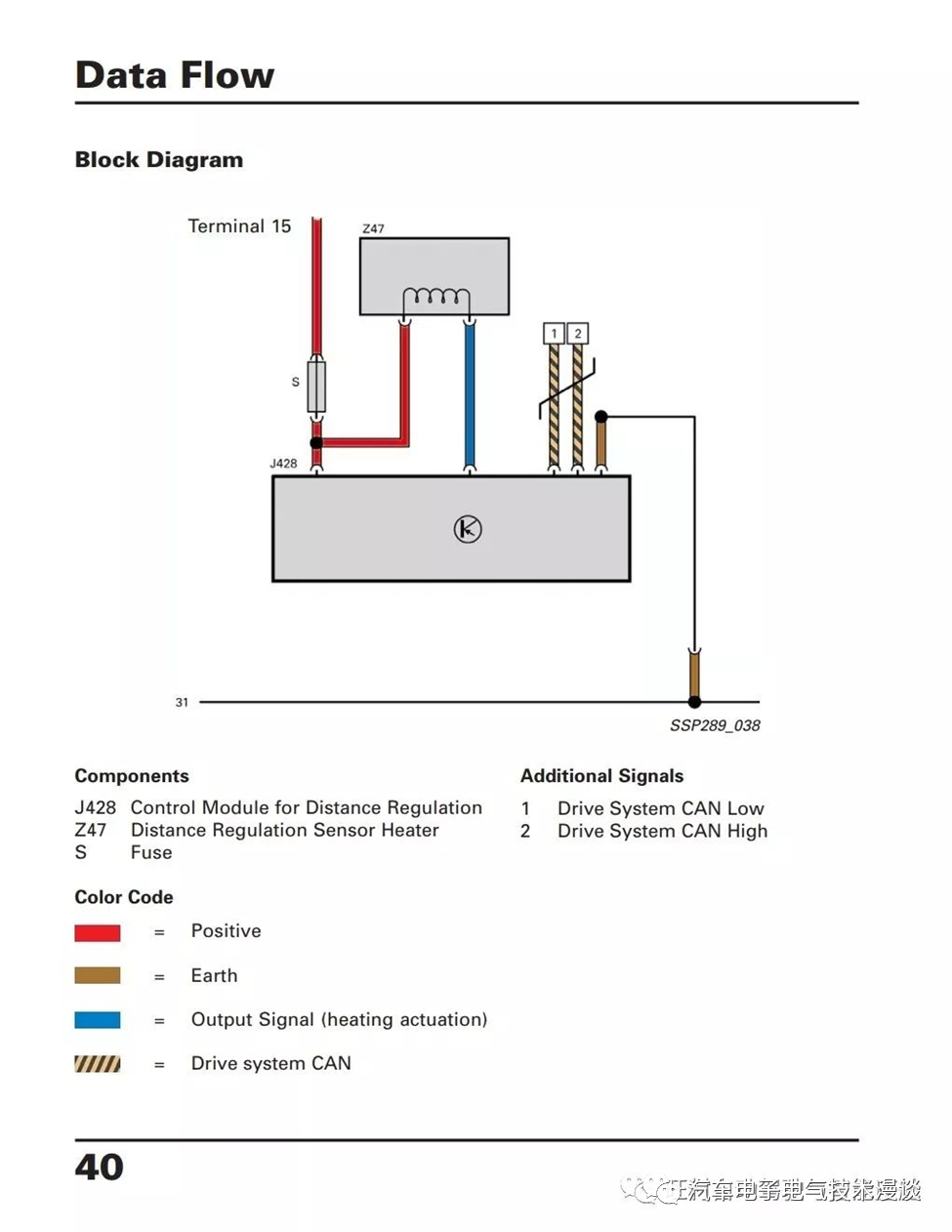
信息傳遞
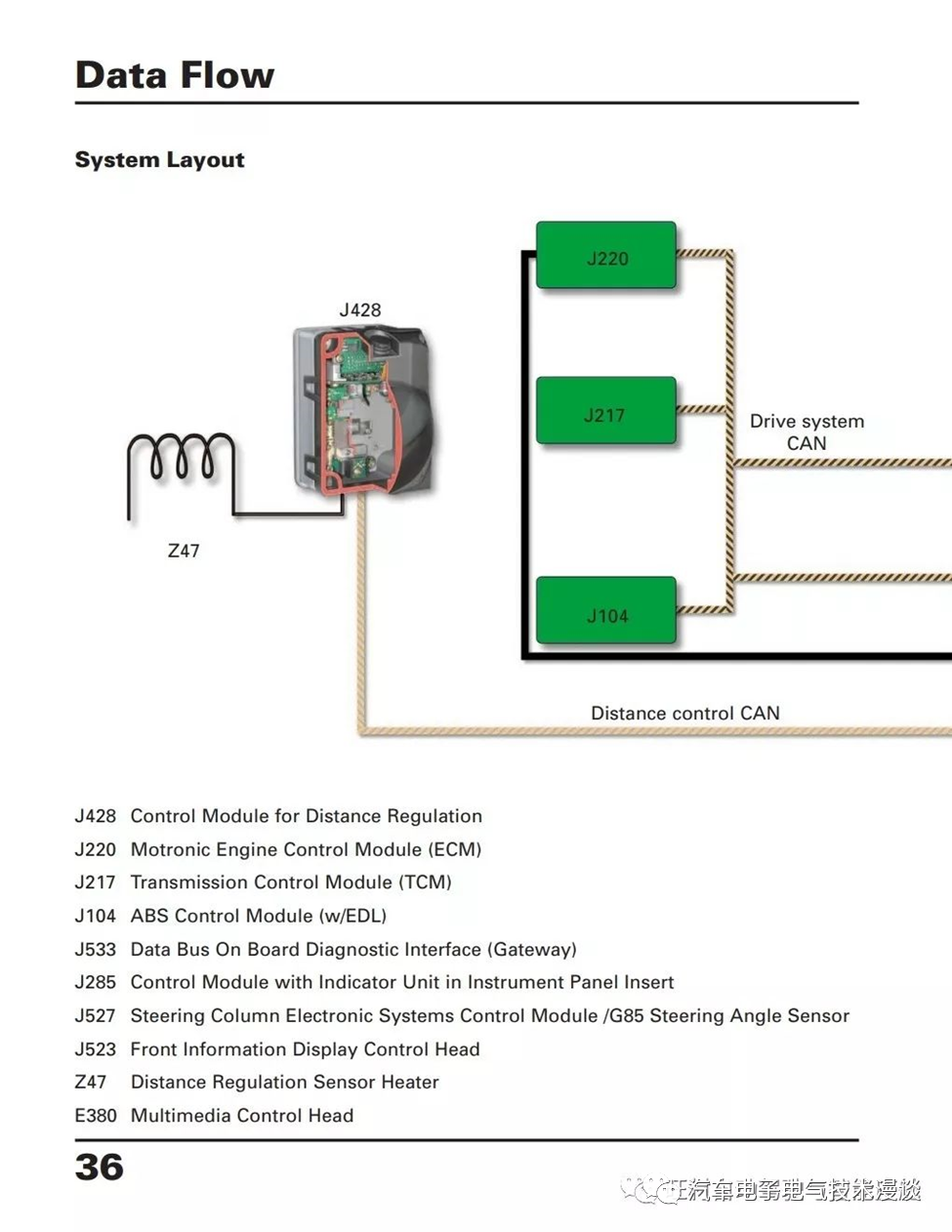
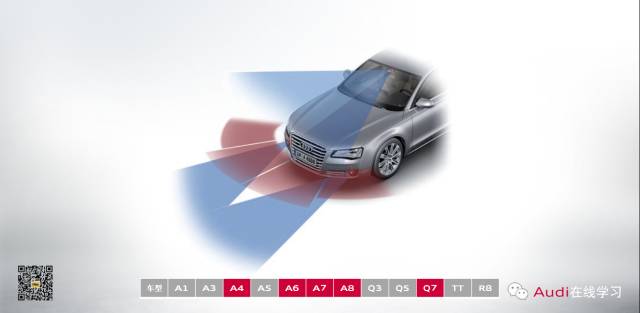
1)雷達

Radiodetecting and ranging(Radar雷達)是物體定位電子技術(shù),發(fā)出的雷達射線在合適的表面和物體上被反射。
奧迪的雷達安裝位置有兩種,一種就是在安裝在中網(wǎng)后,一種就是在霧燈格柵后。
一開始車輛配置的都是一個雷達,直到第四代奧迪A8首次配備了兩個雷達,而且就是在原來霧燈的位置。
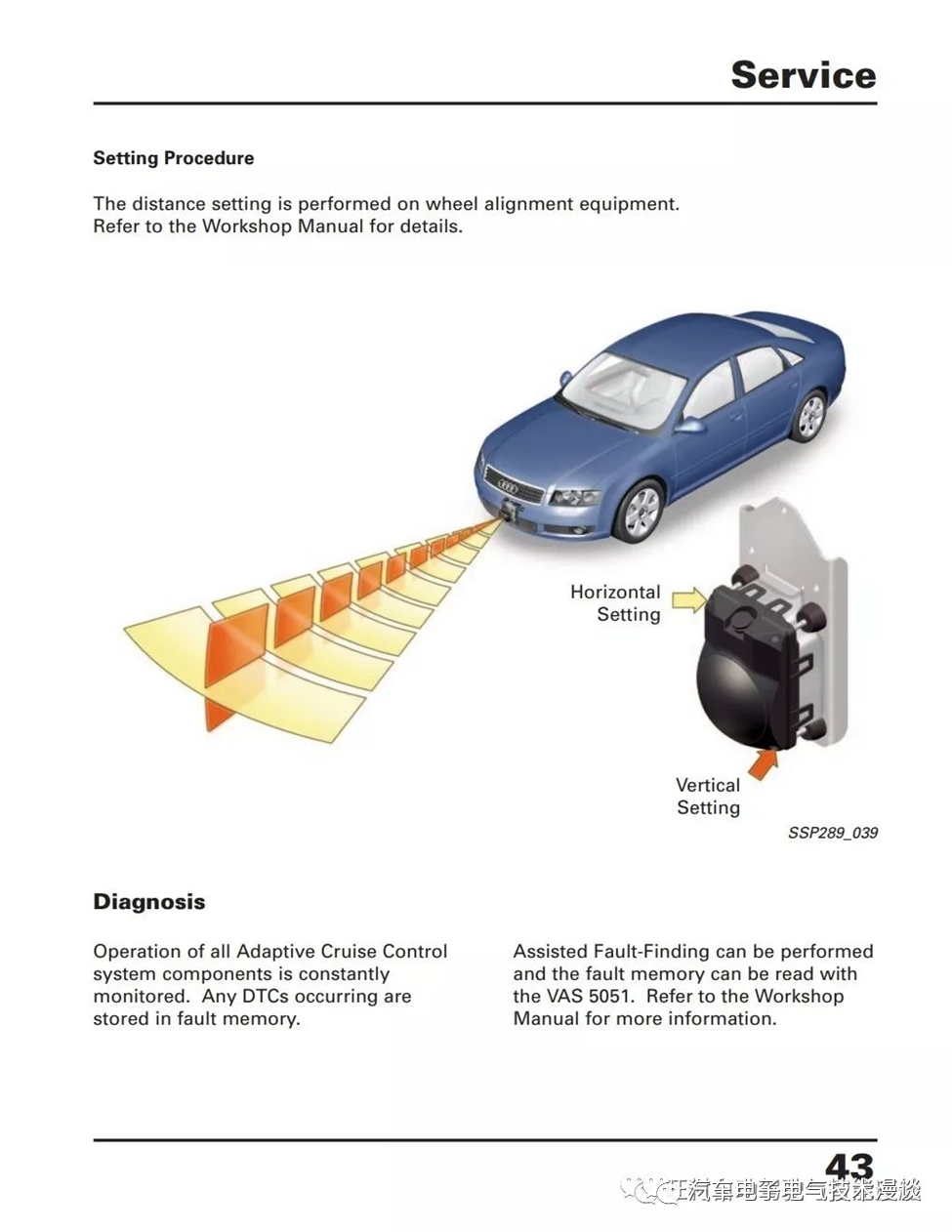
傳感器(雷達發(fā)射器和接收器)與控制器分別安裝在同一個殼體內(nèi),這些部件是無法分開,在售后服務(wù)中若需要時只能整體更換。
2)該如何使用呢?

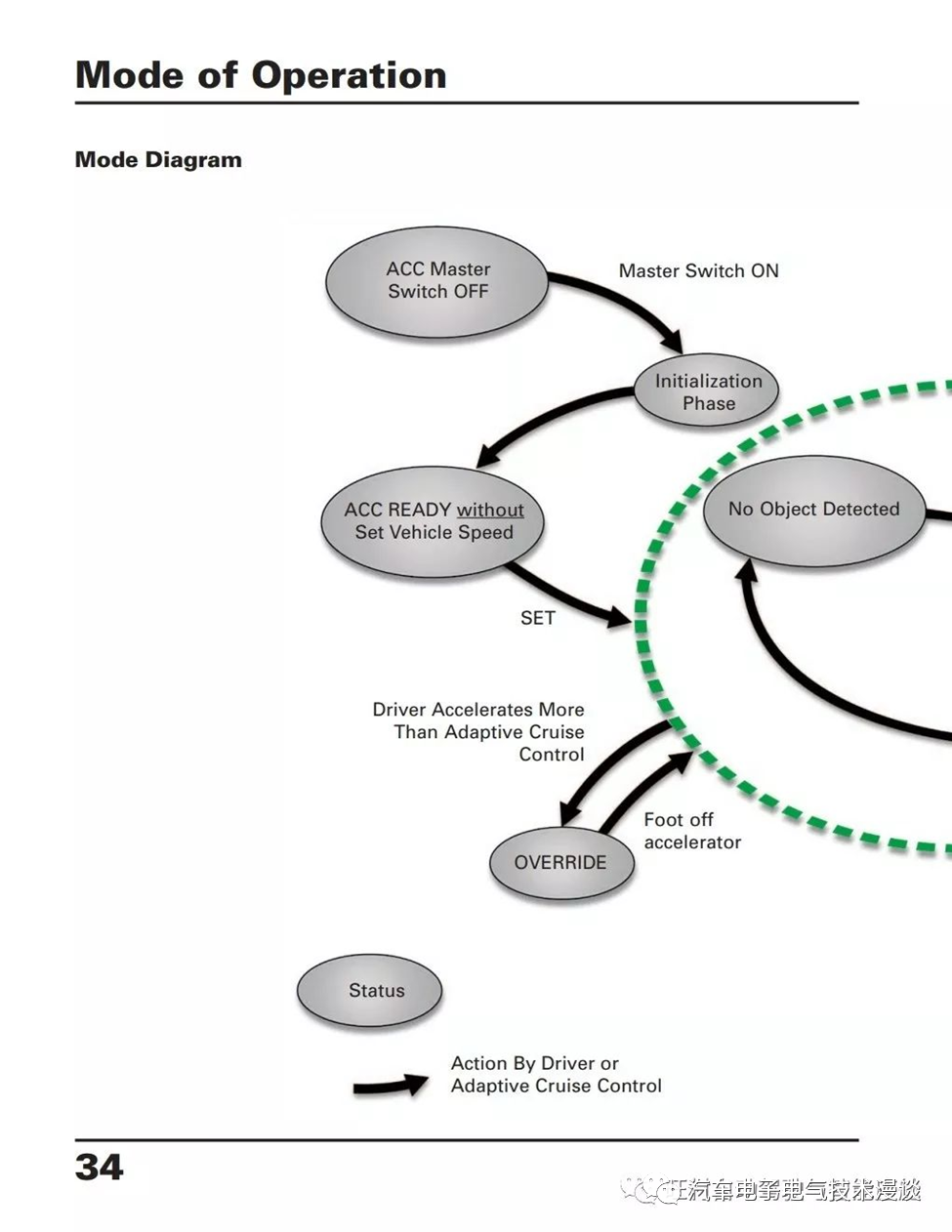
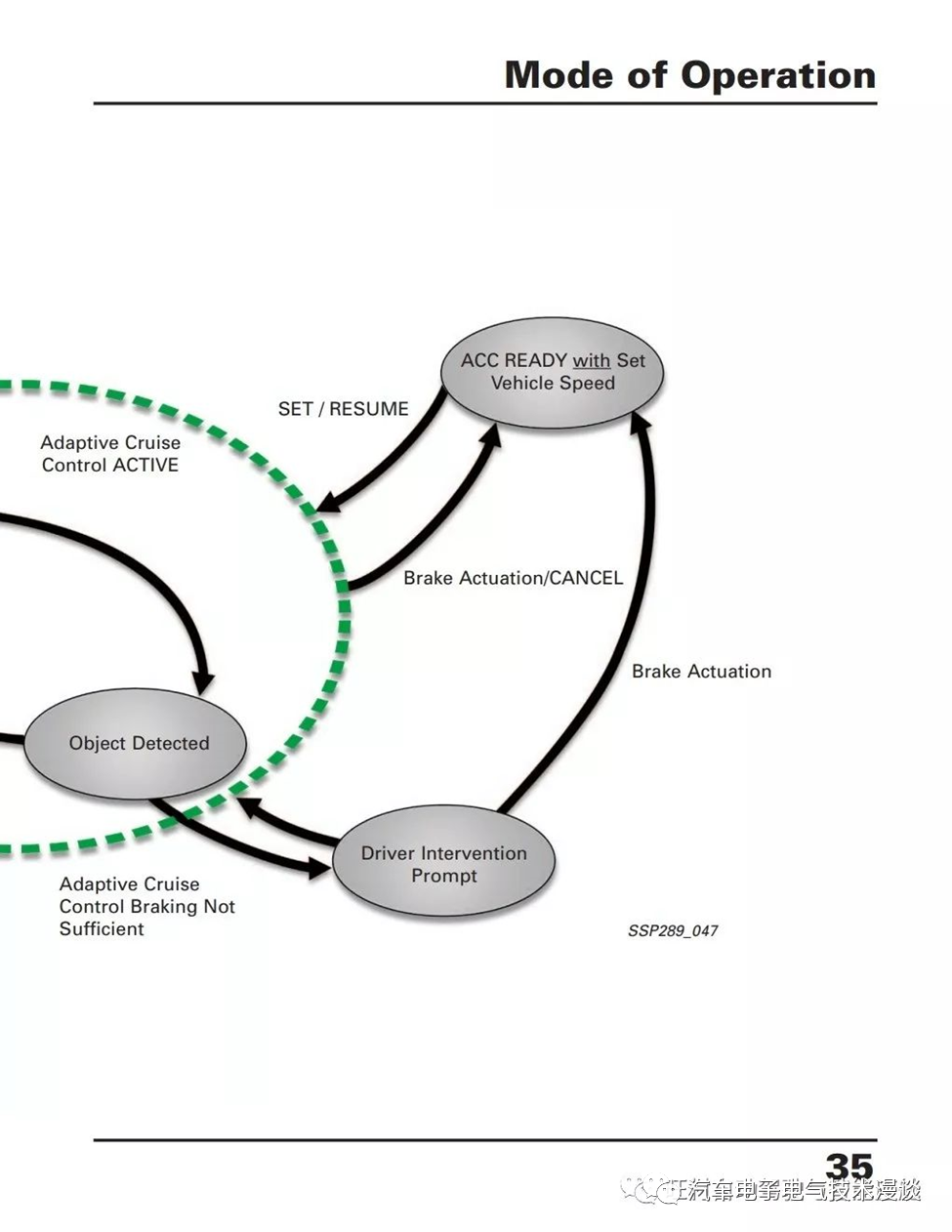
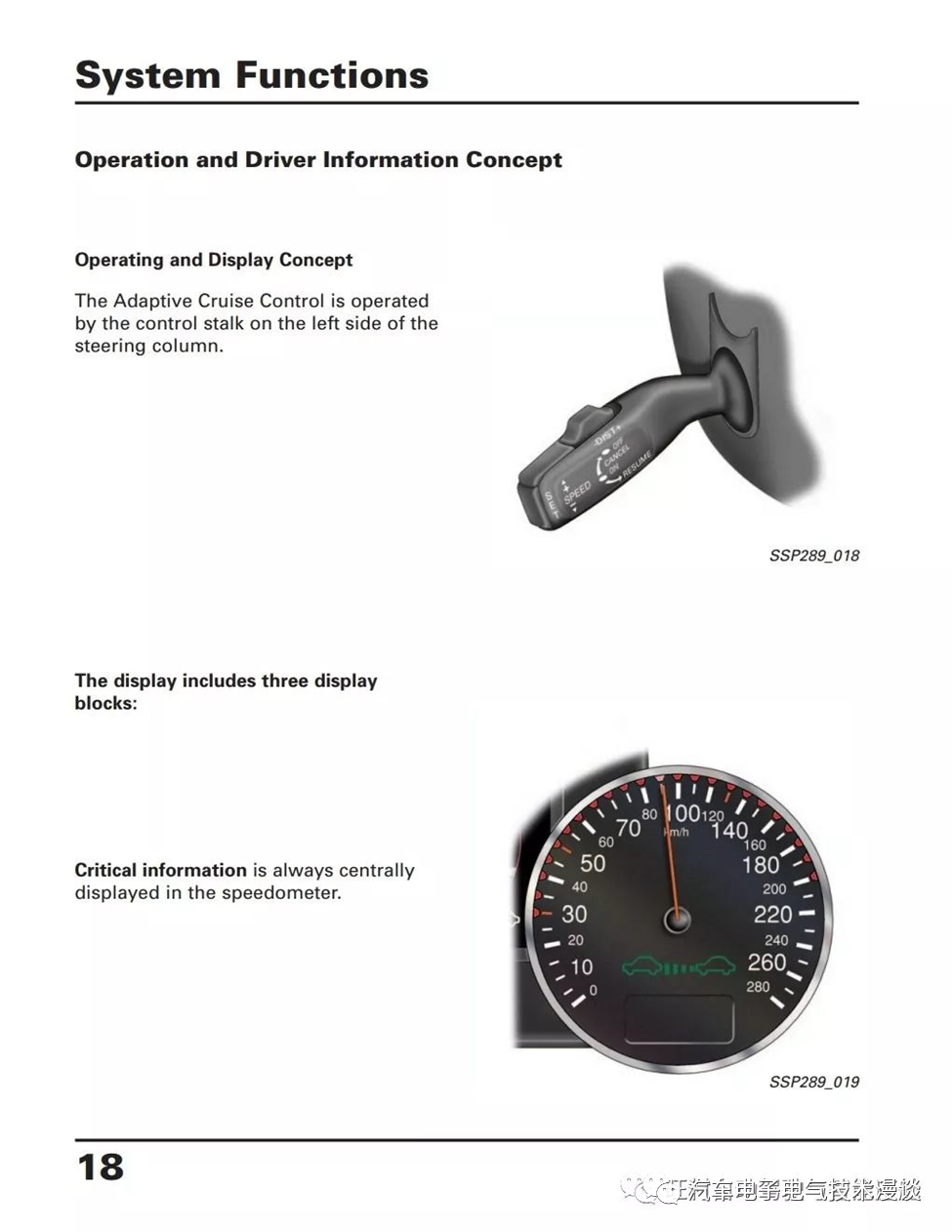
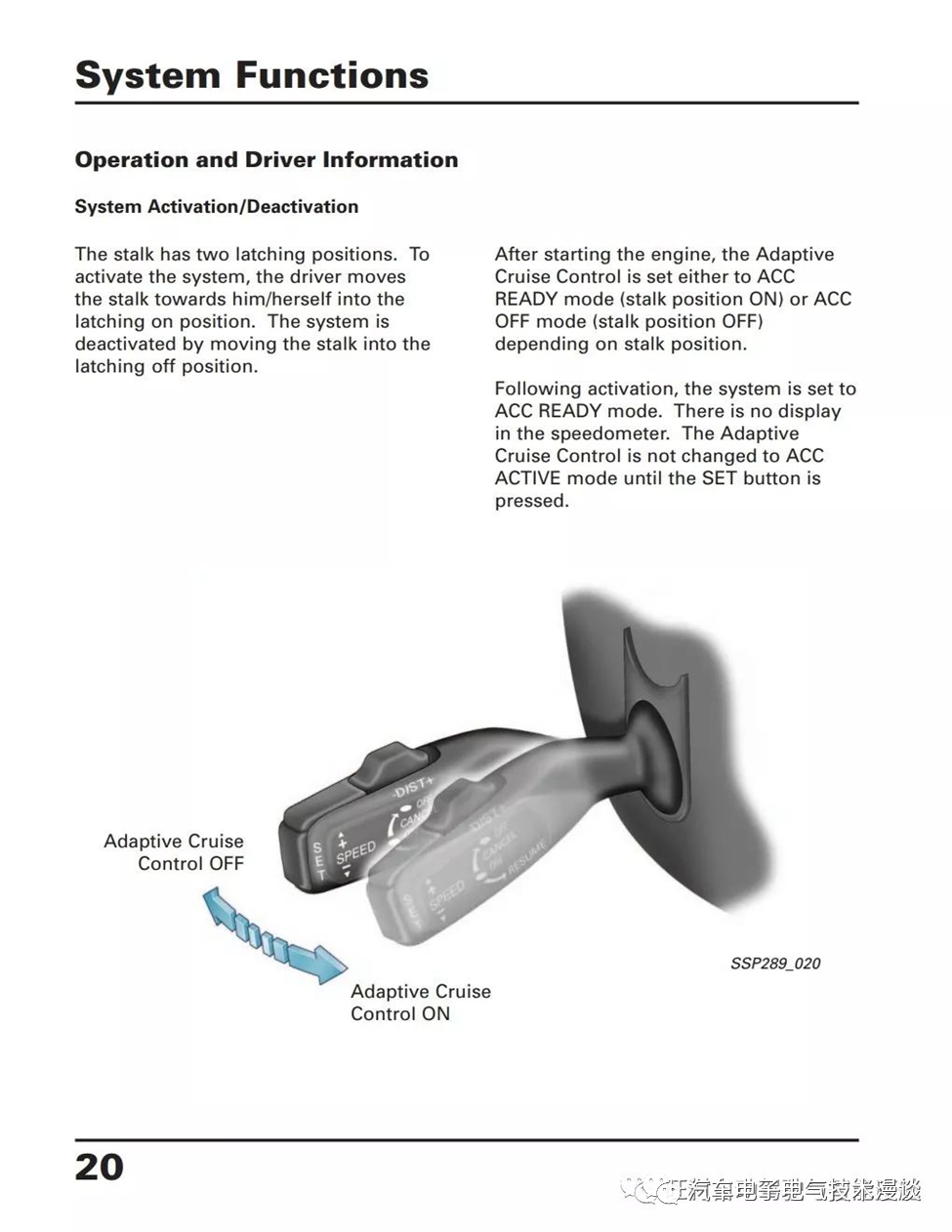
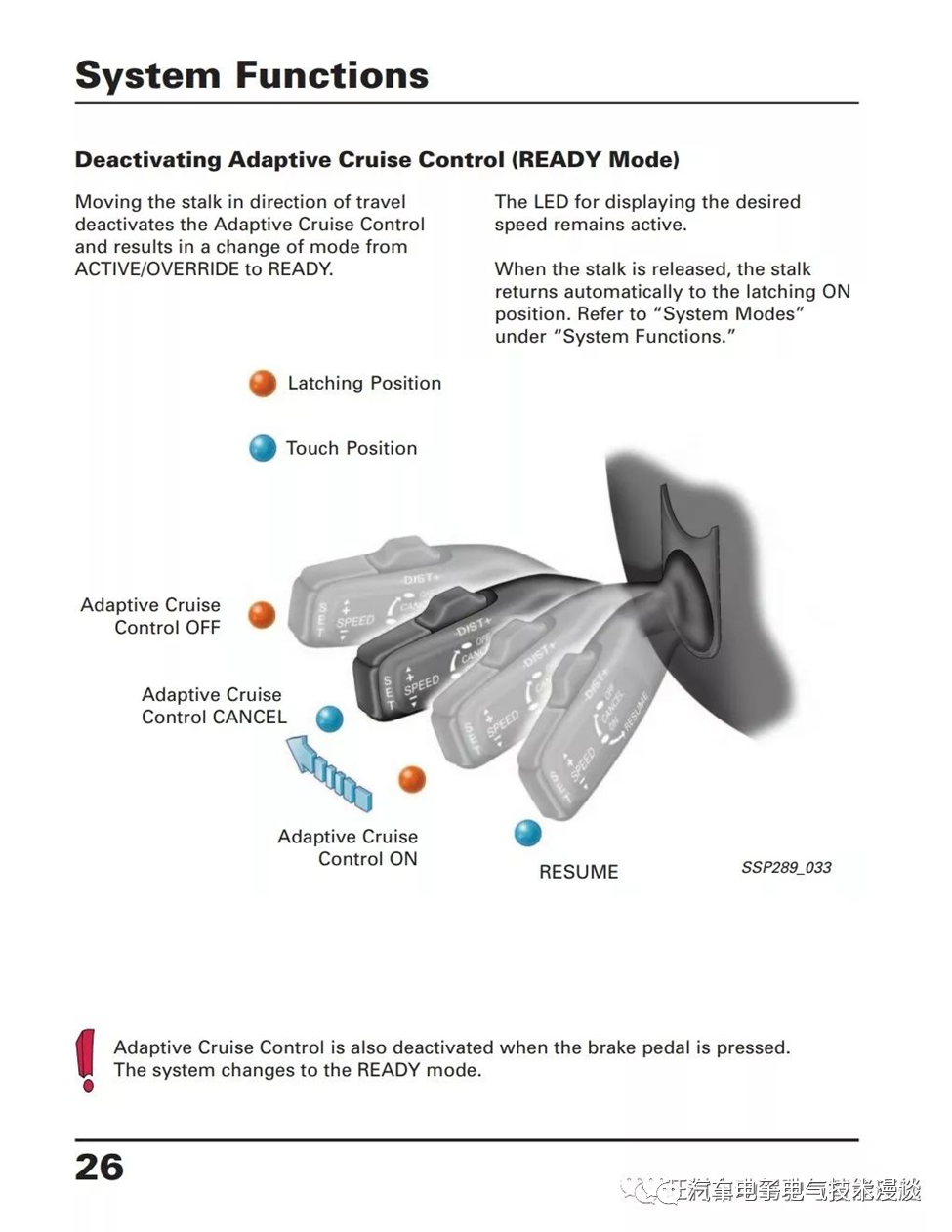
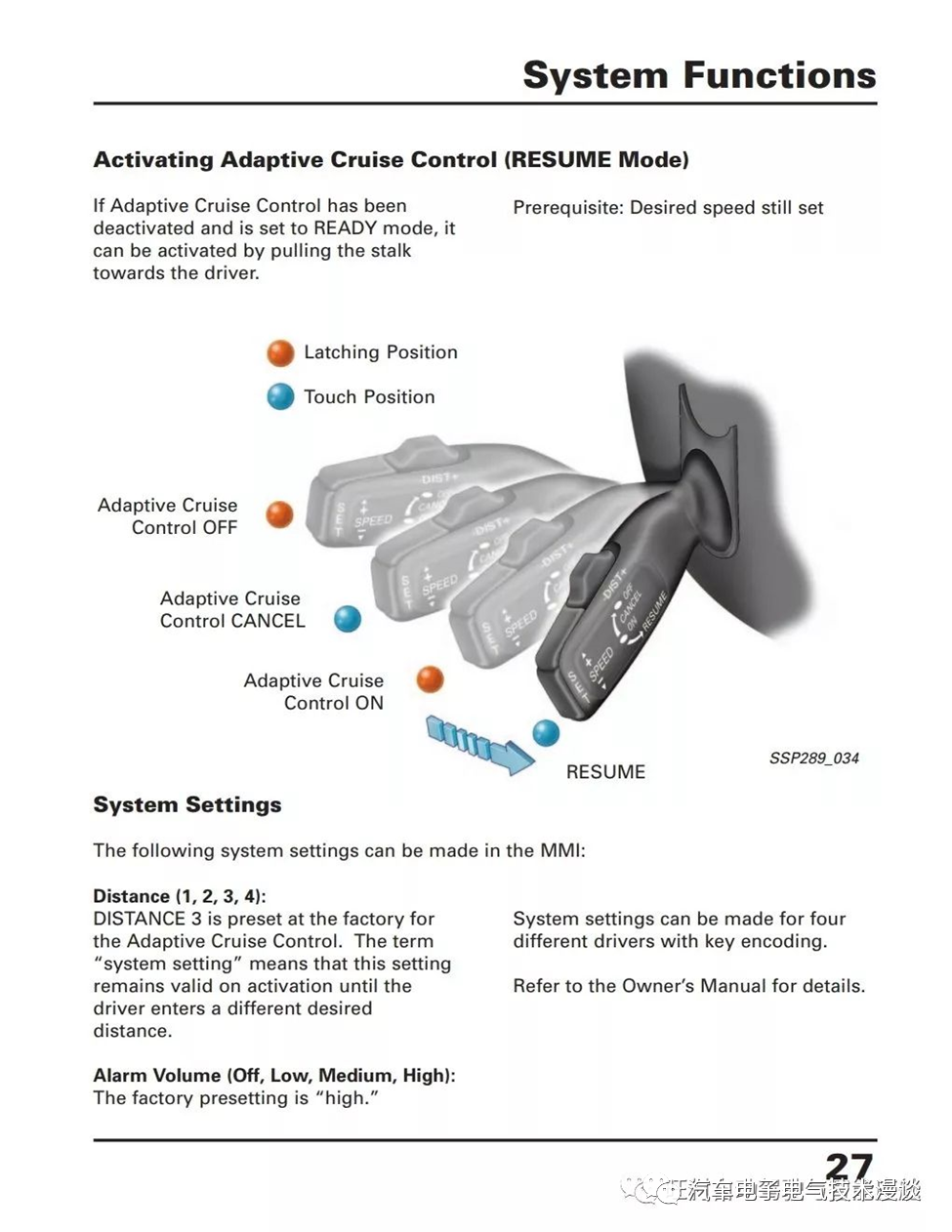
對于配備ACC的車輛,在燈光撥桿下面會有上圖的撥桿,在系統(tǒng)狀態(tài)內(nèi):
>關(guān)閉(OFF):系統(tǒng)被關(guān)閉,撥桿可以停在該位置
>取消(CANCEL):系統(tǒng)中斷運行
>打開(ON):系統(tǒng)處于準備就緒狀態(tài),撥桿可以停在該位置
>恢復(fù)(RESUME):系統(tǒng)重新激活運行
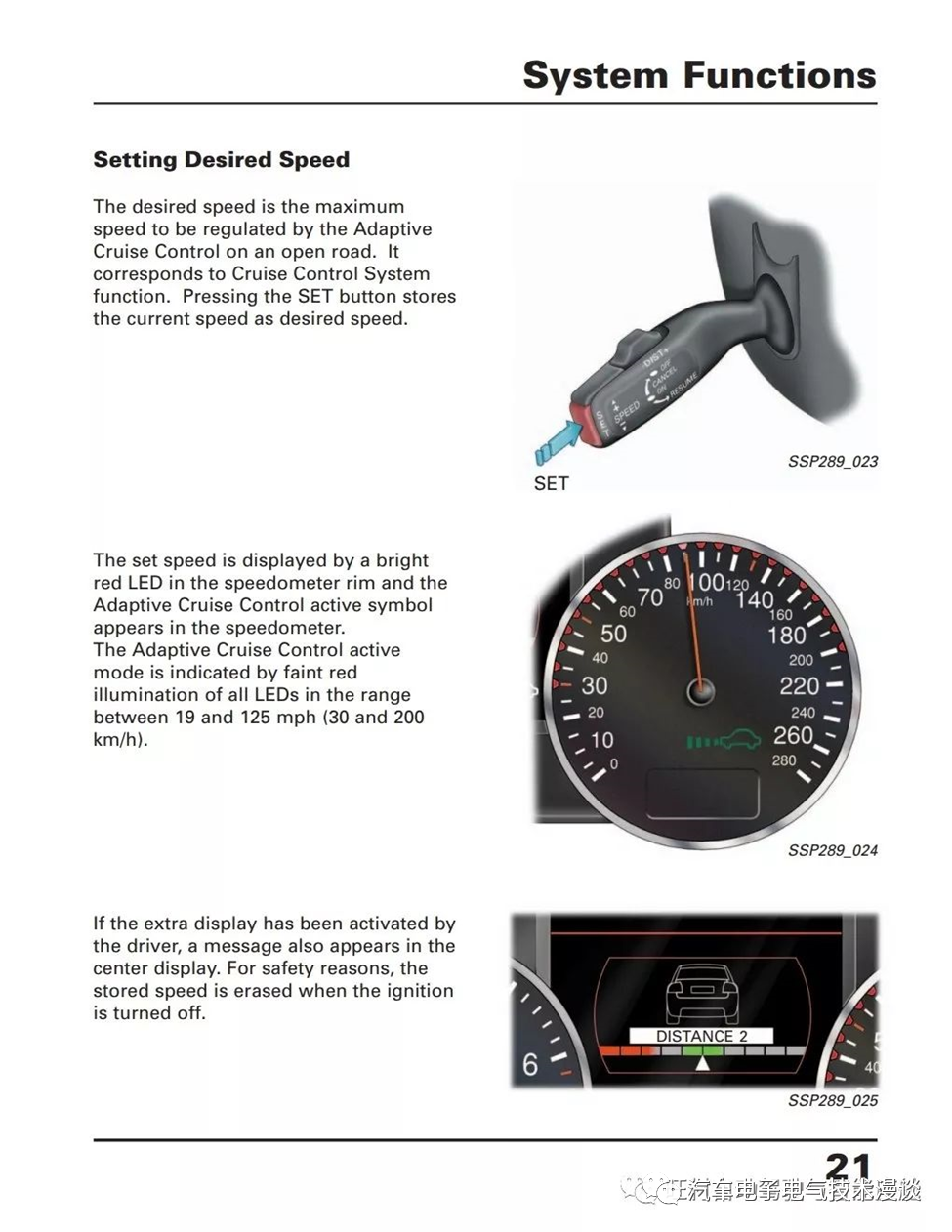
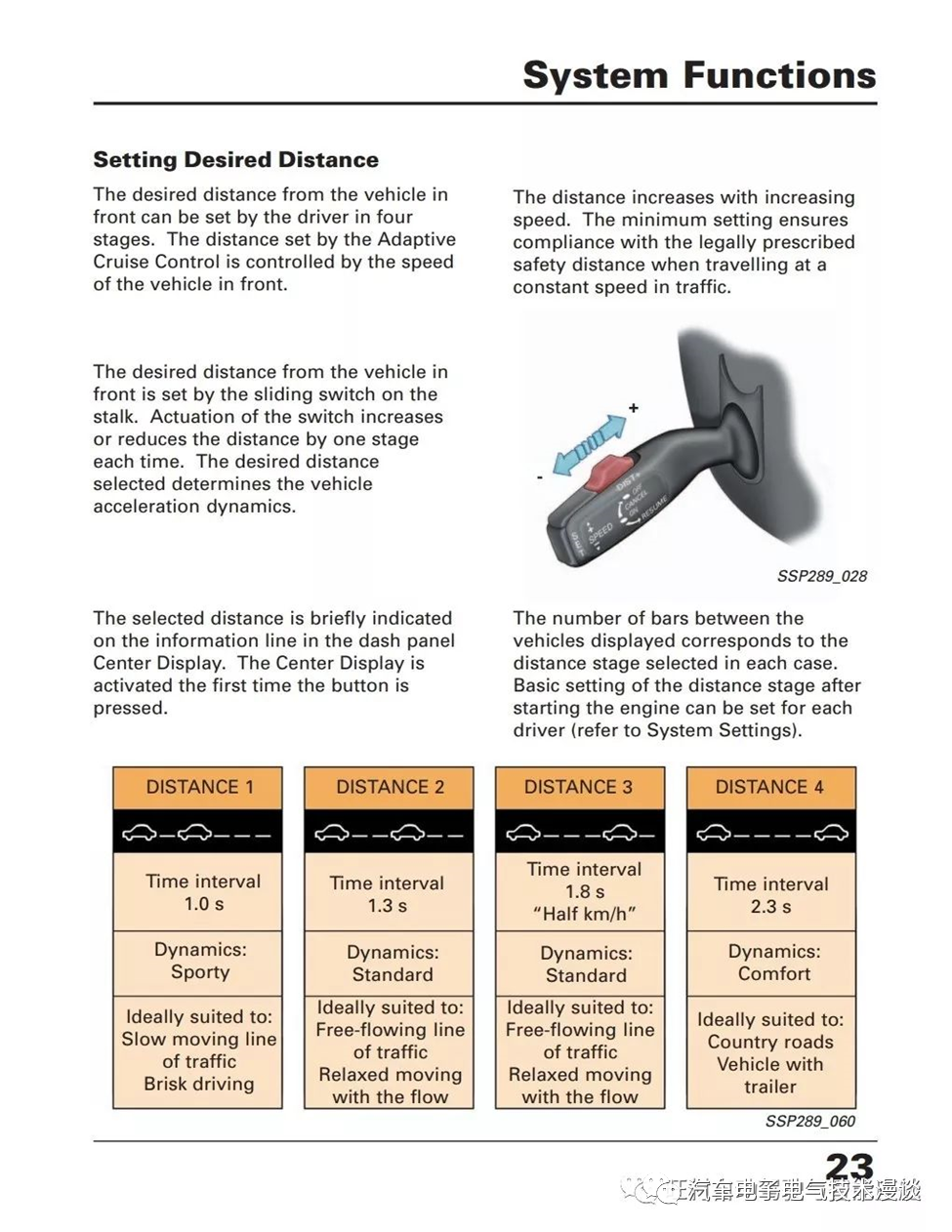
當ACC打開后,用戶可以通過SET按鈕來設(shè)定想要的車速,若車速需要調(diào)節(jié),那么請上下調(diào)整撥桿(SPEED),若要調(diào)節(jié)本車與前車的距離,可以通過DISTANCE設(shè)定車距,一般都是4個車距,而到了新Q7和B9開始配置5個車距。

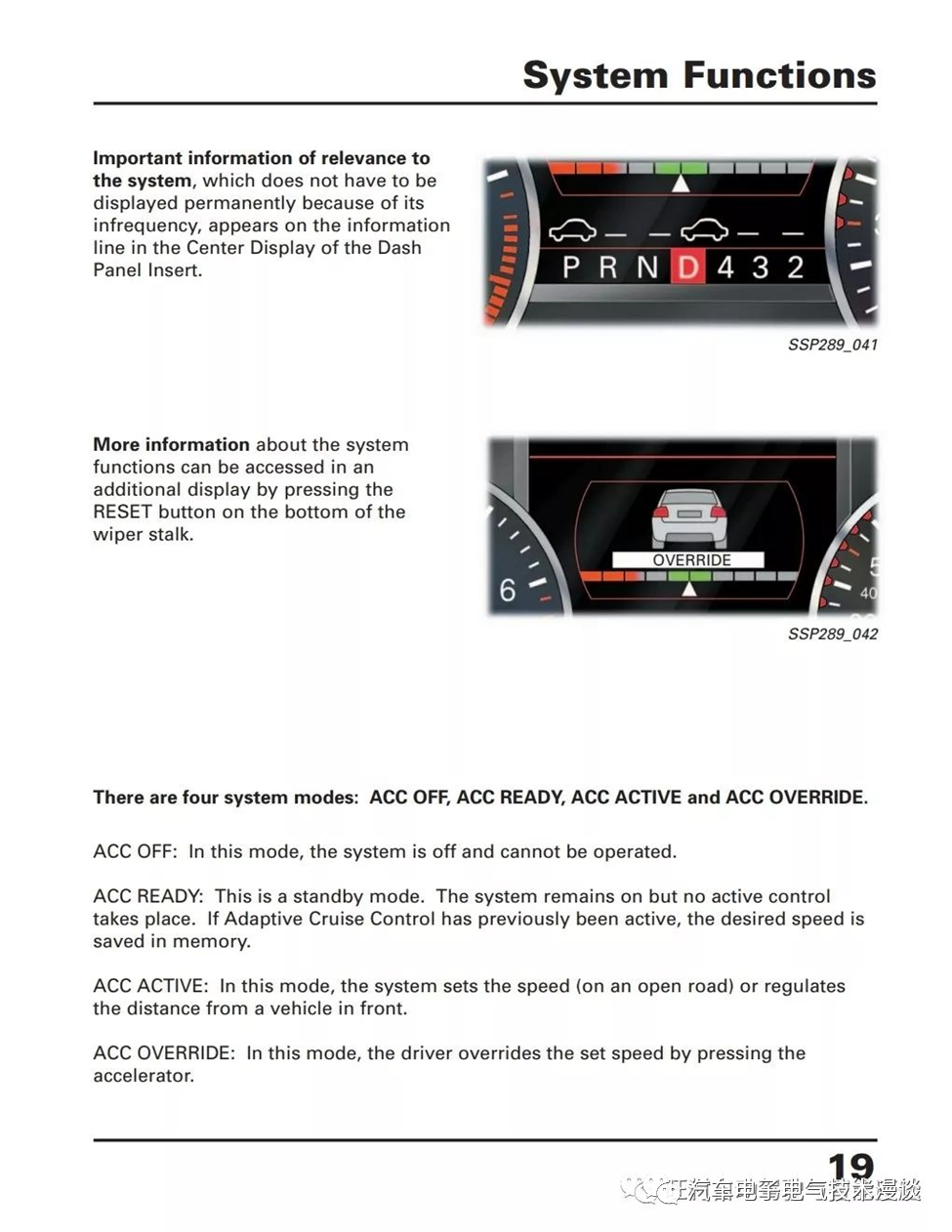
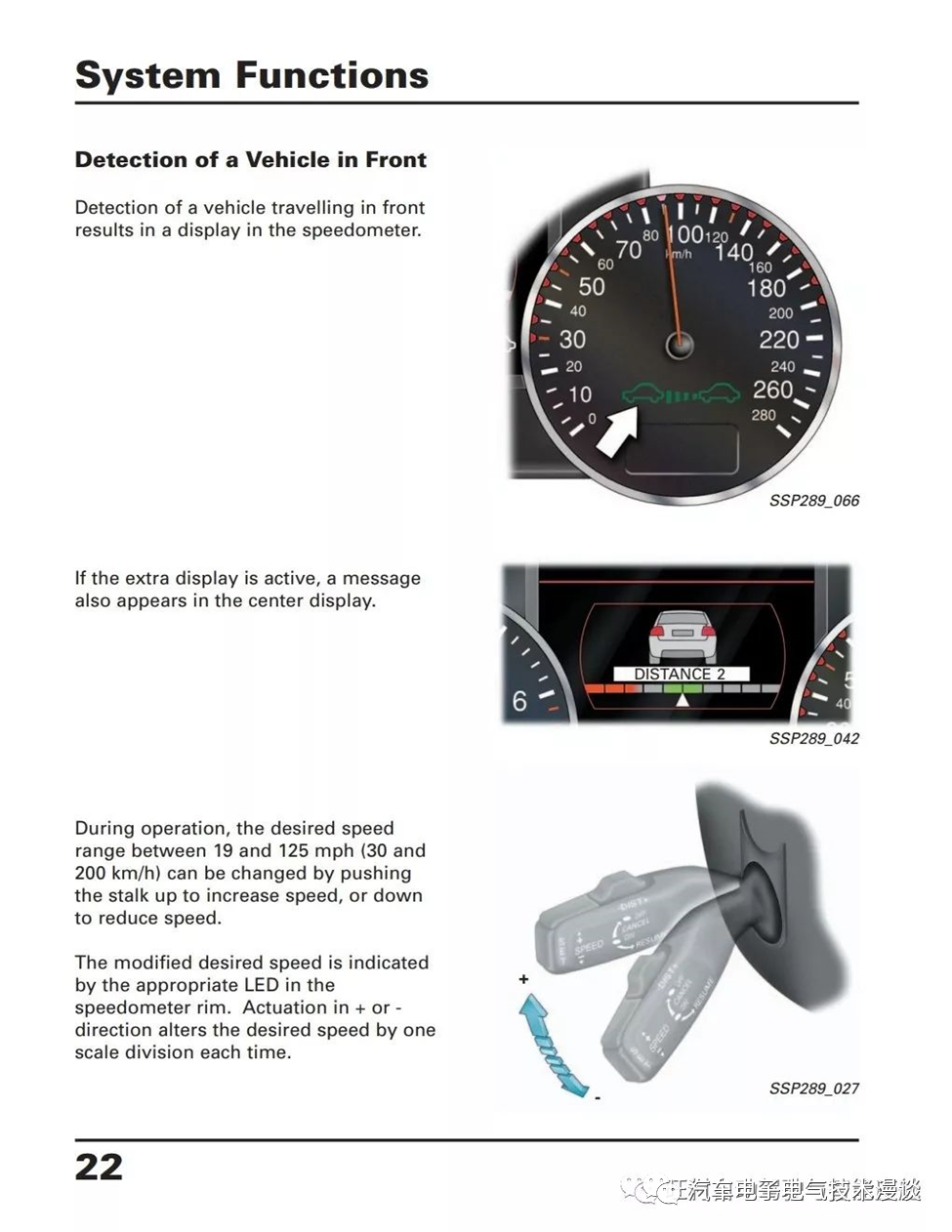
當ACC在工作的時候,系統(tǒng)可以在組合儀表上面顯示相應(yīng)的信息,例如指示燈和中央顯示屏,而設(shè)定的期望車速則以另一種顏色的發(fā)光二極管顯示。
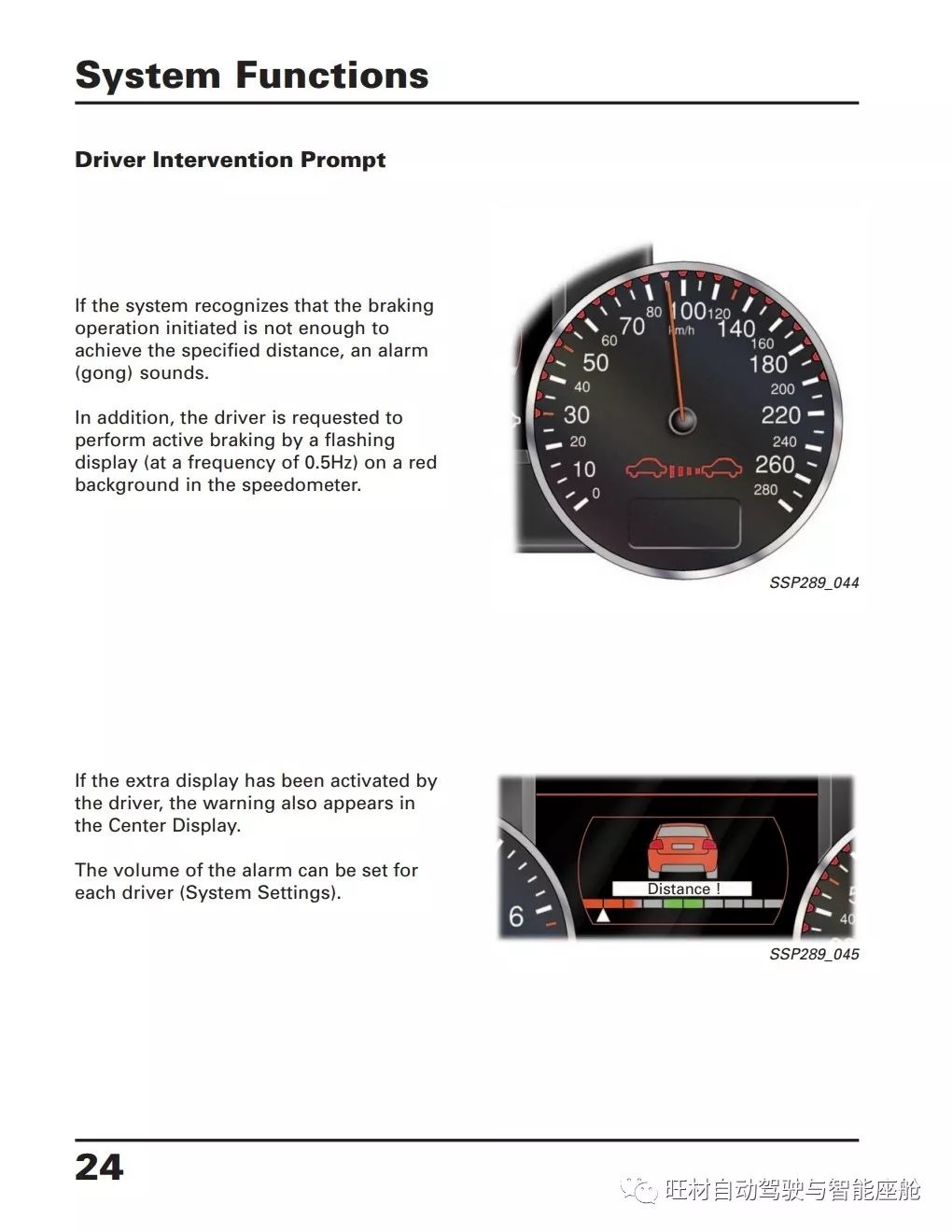
在實現(xiàn)期望車距的自動制動(自適應(yīng)巡航控制系統(tǒng)基本功能)過程中,為了不使駕駛員感到不安并確保良好的行駛舒適性,最大減速制動被限制在大約40%左右。在某些特定的情況下,此時達到的制動減速不夠?qū)崿F(xiàn)期望車距。這時就需要駕駛員的“協(xié)助”。通過相應(yīng)的圖像和聲音警告要求駕駛員實施制動。
3)有速度限制嗎?
對于駕駛輔助系統(tǒng),速度始終都會是一個限制,ACC也不例外。從第一代ACC在A8(D3)上使用,系統(tǒng)是在30km/h才能使用,而到了第三代ACC在A8(D4)上使用時,系統(tǒng)可以在0km/h時激活,只不過系統(tǒng)會自動加速到30km/h。
在國內(nèi),ACC調(diào)節(jié)的最高車速一般都是是150km/h。
(3)ACC系統(tǒng)的局限性

在某些駕駛情形下,自適應(yīng)巡航控制系統(tǒng)的功能是受到限制的:
>只能識別位于感應(yīng)器識別區(qū)域內(nèi)的汽車
>系統(tǒng)只能有限的識別在前方密集行駛的、偏在一邊行駛的或加塞進來的汽車
>難以識別的物體,如在前方行駛的兩輪車、離地間隙大的汽車或超出車體的裝載物,往往識別延遲或無法識別
>在駛?cè)霃澋罆r,ACC可能對相鄰車道上的物體做出反應(yīng)并導(dǎo)致制動,此時建議關(guān)閉系統(tǒng)。
>當車輛靜止時,車速低于50km/h時且系統(tǒng)認為一般不會繞行,那么ACC可能對靜止物體作出有限反應(yīng)。
>為了安全起見,在路況不良或天氣條件差等情況下,不允許使用ACC。ACC對于行人、動物、橫向的或迎面而來的物體沒有反應(yīng);反射物體,如導(dǎo)向護欄或隧道入口、暴雨和結(jié)冰可能影響雷達傳感器的功能。
(4)ACC擴展功能
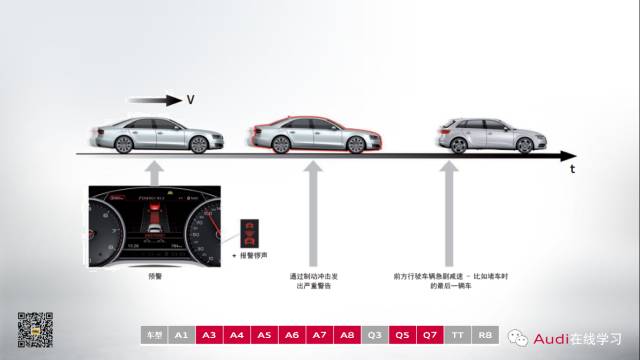
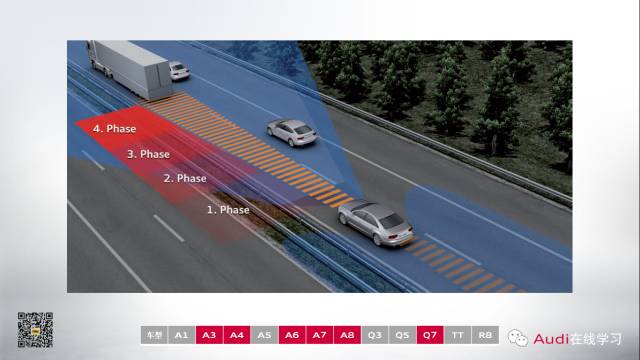
1)奧迪制動警告(Audi braking guard)
在及時識別的前提下,如果前方行駛車輛突然制動或者本車以高速使近明顯緩慢的物體,那么該系統(tǒng)對危險程度進行分析,根據(jù)情況的不同會進行預(yù)警和制動警告,以此來提醒駕駛員注意前方車輛。即使ACC處于關(guān)閉狀態(tài),奧迪制動警告也處于工作狀態(tài)。

2)走走停停(Stop&go)
如果被自適應(yīng)巡航控制系統(tǒng)探測到的前行車輛停下,那么裝有自適應(yīng)巡航控制系統(tǒng)的車輛無需駕駛員操作而對車輛進行制動直至停下,前提條件是目標對象在靜止前是運動的;如果前方行駛車輛短時停住后馬上又起步行駛,裝有自適應(yīng)巡航控制系統(tǒng)的車輛也隨之重新自動加速,若等待過長則不會自動起步,而需要踩油門或者將撥桿到RESUME。
而從全新一代的奧迪Q7(4M)開始,系統(tǒng)可以對靜止的對象進行識別。當車速在50km/h以下時,ACC和攝像頭識別到目標車已經(jīng)靜止,且在自己的車道上面,那么系統(tǒng)才會工作。
3)奧迪預(yù)警系統(tǒng)(Audi pre sense)
奧迪預(yù)警系統(tǒng)首次應(yīng)用在奧迪A8(D4),不同的車型根據(jù)配置有多種預(yù)警版本,ACC一般為奧迪預(yù)警系統(tǒng)提供前部預(yù)防信息。可以實現(xiàn)的功能有奧迪制動警告、拉緊安全帶、關(guān)閉車窗和天窗和激活危險警報燈。
4)起步監(jiān)控
對于配備ACC的車輛重新自動起步之前,系統(tǒng)對裝有ACC的車輛和前方行駛車輛之間的區(qū)域進行“監(jiān)控”,一旦識別到障礙物,即發(fā)出視覺和聲音警告。此時雖然啟動起步過程,但是車輛行駛緩慢,由此,駕駛員有足夠的時間通過制動或規(guī)避動作對障礙物作出反應(yīng)。對前方區(qū)域的監(jiān)控通過三個獨立的系統(tǒng)進行:雷達傳感器、前部攝像頭和駐車輔助系統(tǒng)的超聲波傳感器。

5)走走停停與奧迪保持輔助系統(tǒng)
走走停停功能也可以與奧迪保持輔助系統(tǒng)(AHA)配合使用,奧迪保持輔助系統(tǒng)可不受自適應(yīng)巡航控制系統(tǒng)之影響隨時開啟和關(guān)閉。如果AHA已被開啟并且停停走走功能在車輛靜止時已被激活,那么AHA系統(tǒng)即被動地隱退至后臺運作(類似“standby 待命”運行)。
如果在車輛靜止并且AHA系統(tǒng)被激活時關(guān)閉自適應(yīng)巡航控制系統(tǒng),那么AHA將重新發(fā)揮功能并將車輛保持在靜止狀態(tài)。
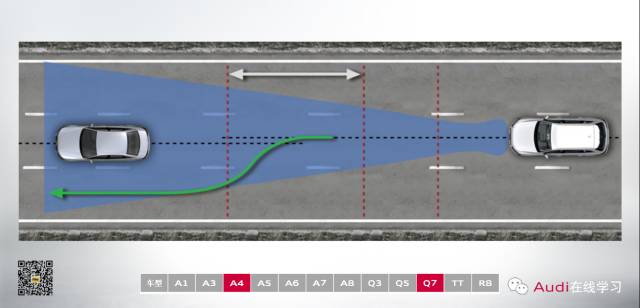
6)超車輔助
超車輔助可以幫助駕駛員快速超車。
自適應(yīng)巡航控制系統(tǒng)將轉(zhuǎn)向燈的激活視為超車的愿望,接著車輛在完全離開正在行駛的車道和前方路況為“暢通”前開始加速,這一特性符合駕駛員在正常的駕駛操作。
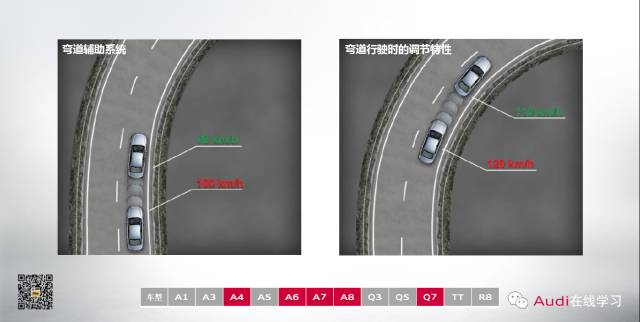
7)彎道輔助
在使用彎道輔助功能時,自適應(yīng)巡航控制系統(tǒng)需要使用導(dǎo)航系統(tǒng)的預(yù)測路段數(shù)據(jù)。如果識別到即將到來的彎道,那么ACC就開始計算可安全通過該彎道的速度。如果當前行駛速度超過計算出的規(guī)定速度,那么彎道輔助系統(tǒng)即被激活,隨后降低驅(qū)動扭矩,車速在進入彎道時被降低10-15km/h。
另外在駛?cè)霃澋罆r,ACC若識別到車輛的橫向加速度超過計算的規(guī)定值,那么將適當降低行駛車速。在測量規(guī)定速度時將考慮帶拖車行駛和所選擇的駕駛模式等因素。

8)禁止右車道超車的功能
在ACC激活情況下,只有在車速不超過約80km/h時才能在右車道超車。當車速在約80km/h-90km/h時,只能以受限的相對車速來超車。車速超過90km/h時該功能自動激活,司機通過操縱桿(RESUME)、油門或者提高設(shè)定的期望車速,均可終止該功能。
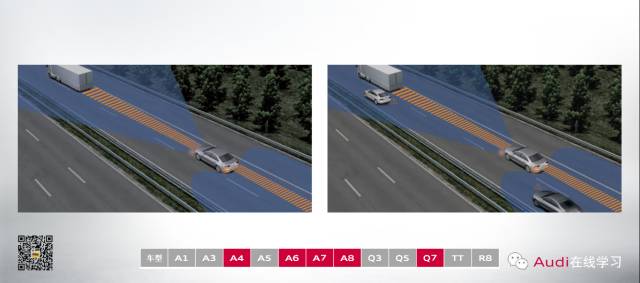
9)與換道輔助系統(tǒng)配合
使用該功能需要裝備奧迪換道輔助系統(tǒng)和前部攝像頭R242,制動干預(yù)將根據(jù)車后的交通和超車道上的情況進行調(diào)整:
行駛情景1
一輛配有ACC的車輛以明顯的高速接近前方行駛車輛,并且駕駛員打開轉(zhuǎn)向燈表示要進行換道,ACC獲得的信息是車前后方的左車道上沒有車輛,ACC根據(jù)這些信息判斷此時可以無危險的超車并且可以不降低車速,因此換道過程就明顯地更加平順和舒適。
行駛情景2
一輛配有ACC的車輛以明顯的高速接近前方行駛的車輛,并且駕駛員打開轉(zhuǎn)向燈表示要變換車道,ACC系統(tǒng)獲得的信息是在左側(cè)車道的前方和后方都有行駛車輛,此時系統(tǒng)認為能夠有限的超車,不過要降低車速。

10)距離顯示/距離報警
這個新功能可以讓駕駛員知道本車與前方車輛的距離且在這個距離低于駕駛員設(shè)置的距離時發(fā)出報警。使用該功能的條件是ACC未激活。
ACC持續(xù)分析雷達傳感器的測量值,如果車速超過60km/h,在組合儀表上面顯示與前車的距離。
駕駛員可以在MMI中設(shè)置距離報警閾值,范圍在0.6s-3s之間。如果ACC識別到低于設(shè)置的閾值,那么就會發(fā)出警告。
11)避讓輔助系統(tǒng)
ACC控制器根據(jù)雷達和前部攝像頭信息在保證安全的前提下計算出合適的避讓車道,并輔助駕駛員完成轉(zhuǎn)向。
如果在嚴重警告后主動規(guī)避障礙物,那么只要駕駛員主動轉(zhuǎn)向,避讓輔助系統(tǒng)就施加少量的轉(zhuǎn)向力矩(最高3Nm)以此提供幫助。該功能在30-150km/h時才會工作。
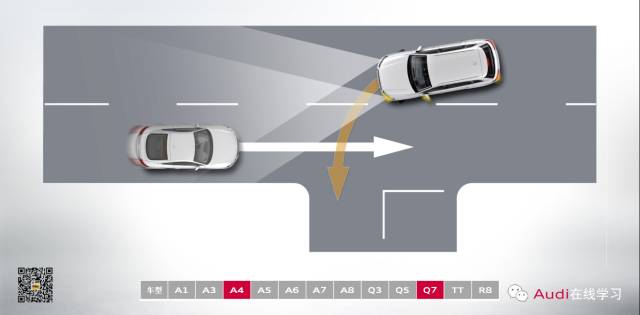
12)轉(zhuǎn)彎輔助系統(tǒng)
轉(zhuǎn)彎輔助系統(tǒng)主要是為了提高左轉(zhuǎn)的安全性。
當車輛以10km/h以下的車速轉(zhuǎn)彎時,激活了左轉(zhuǎn)向燈,若系統(tǒng)識別到有碰撞危險,那么轉(zhuǎn)彎輔助系統(tǒng)會以一次制動干預(yù)防止汽車與反向車道的車輛發(fā)生碰撞,此時車輛停止在原有車道上。
該系統(tǒng)需要使用ACC的雷達信息和前部攝像頭的測量信息,探測車道的變化、路面標記和對面來車情況。

13)堵車輔助系統(tǒng)
在出現(xiàn)堵車或者車流慢行的時候且車速在65km/h以下,堵車輔助系統(tǒng)可以減輕駕駛員的負擔。該系統(tǒng)使用了走走停停功能和輔助交叉引導(dǎo),可以引導(dǎo)車輛在前方行駛車隊(該車隊至少包括兩輛前方行駛的汽車)后中間位置行駛,并在極限情況下實現(xiàn)自動轉(zhuǎn)向功能。
若要使用堵車輔助系統(tǒng),必須激活A(yù)CC,另外還需要打開主動式車道保持輔助系統(tǒng),并在MMI中設(shè)置堵車輔助系統(tǒng)打開。

14)預(yù)調(diào)節(jié)效率輔助系統(tǒng)
預(yù)調(diào)節(jié)功能使用導(dǎo)航系統(tǒng)的地圖信息預(yù)測即將的行駛情況,根據(jù)車速限制或即將到來的道路走向(彎道、十字路口或換道)系統(tǒng)自行制動,然后再次加速到設(shè)定的車速,同時在自動調(diào)節(jié)時也使用智能滑行模式,如果不開啟ACC,那么系統(tǒng)只有純粹的指示功能,不帶調(diào)節(jié)性干預(yù)。中國市場暫未引進該功能。

(4)售后維護
3.奔馳ACC系統(tǒng)
(1)ACC特點 自適應(yīng)巡航控制系統(tǒng)的最大優(yōu)點在于不僅能夠保持駕駛?cè)祟A(yù)先設(shè)定的車速,還能夠在特定駕駛條件下隨時根據(jù)需要降低車速,甚至自動制動。 當車速超過30公里/小時,無論駕駛?cè)苏院畏N方式駕駛車輛,自適應(yīng)巡航控制系統(tǒng)均會介入工作,以使車輛始終保持駕駛?cè)祟A(yù)先設(shè)定的車速。為此,系統(tǒng)要么自動提高發(fā)動機動力,要么降低發(fā)動機動力并使變速器降檔,以利用發(fā)動機制動降低車速。在某些情況下(例如下坡行駛或拖車時),如果上述措施不足以使車速降低到預(yù)定值,系統(tǒng)還將使制動系統(tǒng)進行干預(yù)。 ACC自適應(yīng)巡航主要分兩種情況,那就是前方有車的時候和前方?jīng)]有車的時候,簡單來說就是前方有車的時候系統(tǒng)會根據(jù)車主設(shè)定的跟車距離一直跟車前車巡航,前車快跟車也快,前車慢跟車也自動變慢。還有一種情況就是前方?jīng)]車的時候系統(tǒng)就會自動根據(jù)車主設(shè)定的巡航速度勻速前進,解放雙腳,車主只需要掌控好方向盤即可
(2)ACC自適應(yīng)巡航作用
1)通過車距傳感器的反饋信號,ACC控制單元可以根據(jù)靠近車輛物體的移動速度判斷道路情況,并控制車輛的行駛狀態(tài);通過反饋式加速踏板感知的駕駛者施加在踏板上的力,ACC控制單元可以決定是否執(zhí)行巡航控制,以減輕駕駛者的疲勞。
2)ACC系統(tǒng)一般在車速大于25 km/h時才會起作用,而當車速降低到25 km/h以下時,就需要駕駛者進行人工控制。通過系統(tǒng)軟件的升級,自適應(yīng)巡航控制系統(tǒng)可以實現(xiàn)“停車/起步”功能,以應(yīng)對在城市中行駛時頻繁的停車和起步情況。
(3)ACC系統(tǒng)如何使用? 1)ACC開啟/關(guān)閉按鍵:按下此鍵可以在開啟(滿足激活條件時,系統(tǒng)進入待機狀態(tài))或關(guān)閉ACC之間進行切換。

2)ACC復(fù)位/激活:沿此方向(靠近駕駛員側(cè))撥動手柄用來恢復(fù)當前保存的車速或激活A(yù)CC功能。 3)ACC退出:沿此方向(遠離駕駛員側(cè))撥動手柄可退出ACC激活狀態(tài),進入待機狀態(tài)。 4)減少設(shè)置車速:ACC激活狀態(tài),沿此方向撥動手柄可設(shè)置減少車速。 5)增大設(shè)置車速:ACC激活狀態(tài),沿此方向撥動手柄可設(shè)置增大車速。 6)時距設(shè)置:通過旋轉(zhuǎn)巡航手柄末端位置自鎖式按鍵,可以實現(xiàn)四個檔位車間時距的調(diào)節(jié)。

注意:能見度低的情況下,如霧天、大雨、水霧或雪天時,請勿使用自適應(yīng)巡航控制系統(tǒng)。在這些情況下使用自適應(yīng)定速巡航將增加車輛失控的風險。
總之,ACC功能真香!
4.寶馬ACC系統(tǒng)

1)在車輛行駛過程中,安裝在車輛前部的車距傳感器(雷達)持續(xù)掃描車輛前方道路,同時輪速傳感器采集車速信號。當與前車之間的距離過小時,ACC控制單元可以通過與制動防抱死系統(tǒng)、發(fā)動機控制系統(tǒng)協(xié)調(diào)動作,使車輪適當制動,并使發(fā)動機的輸出功率下降,以使車輛與前方車輛始終保持安全距離。自適應(yīng)巡航控制系統(tǒng)在控制車輛制動時,通常會將制動減速度限制在不影響舒適的程度,當需要更大的減速度時,ACC控制單元會發(fā)出聲光信號通知駕駛者主動采取制動操作。當與前車之間的距離增加到安全距離時,ACC控制單元控制車輛按照設(shè)定的車速行駛。

2)ACC增強型輔助駕駛具體有什么功能?
駕駛輔助功能5AS(KAFAS可獨立安裝
1、車道偏離警告
2、車道變更警告
3、行人碰撞警告帶城市制動功能
4、后部碰撞預(yù)防
5、限速信息及交通標志識

帶啟停功能主動式巡航控制5DF(ACC可獨立安裝)
1、車距信息
2、帶制動功能的追尾警告
3、帶制動功能的巡航控制

增強型輔助功能5AT=ACC-PLUS(5AS+5DF)升級
1、車道導(dǎo)向和堵車輔助
2、前部交叉形式警告
3、轉(zhuǎn)向干預(yù)(車道偏離、變更)
4、交叉路口警告
5、帶側(cè)面碰撞防御車道保持
6、緊急避讓輔助


5DF功能介紹
1、跟車很近的情況下,會有撞上突然切線到你前方的車輛風險,寶馬有預(yù)碰撞系統(tǒng),即便本人沒有反應(yīng)過來,車子就會立即制動停止。
2、ACC一個走走停停跟車系統(tǒng),可以釋放雙腳讓車子跟著前面車輛的行駛軌跡自己行走。
3、任何情況下都是可以啟動ACC的,例如堵車或者在等候紅綠燈的時候,但是這里要注意的是你設(shè)定的巡航速度不可以低于30公里,是設(shè)定哦,怎么去理解你設(shè)定巡航速度為30公里呢?就是正常的跟車巡航速度不可以低于30公里。這也就取決于你前車的速度,如果你前車減速至30公里,你的車也會自動減速到30公里。前車停止你也就停止了。
4、停車時間過長,比如很多路口的紅燈時間過長,或者有打開自動啟停或者AutoHold功能,在前車往前啟動時候,你跟在后面是不會跟上的,這時候就需要踩一下油門讓車輛前進了。
5、在高速路上或者快速干道上,ACC把操作簡化為只需要手把著方向盤即可,不要踩油門和剎車。
6、ACC功能附帶Green Acc系統(tǒng),能夠在ECO Pro模式下實現(xiàn)更加節(jié)能高級的自動操作,當跑高速的時候,ACC能更準確的實現(xiàn)勻速行駛,ECO模式下的獎勵里程也會獲得更多。
5AS功能介紹 1、車道偏離警告
內(nèi)部后視鏡面裝有攝像頭或傳感器,對車道兩邊的白線持續(xù)跟蹤,當車子偏離該車道時,會伴有一些方式提醒駕駛員(方向盤震動,屏幕儀表顯示,聲音提醒,此項功能在需要轉(zhuǎn)向時打了轉(zhuǎn)變燈后自動取消,不會再提醒了。

2、車道變更提醒
左右主駕駛和副駕駛反向的反光后視鏡鏡面有一個小三角形,如果左右方向有車輛行駛時,后視鏡面上的小三角形會伴有提示,變成黃色小三角形閃動,提示駕駛員左右方向有車輛行駛,不可以變換車道。

3、前部碰撞警告帶城市制動功能
基于攝像頭的碰撞警告增加了一種制動功能,該功能約5KM/H至最高約為80KM/H的車速范圍內(nèi)執(zhí)行。在此車速范圍內(nèi)行駛時,如果出現(xiàn)嚴重警告駕駛員并未做出任何反應(yīng),自動會以4KM/S2的速度進行車輛減速。
4、行人碰撞警告帶城市制動功能
為避免在城市區(qū)域與行人發(fā)生碰撞并減輕或避免事故后果,在約10KM/H至最高60KM/H車速范圍內(nèi),系統(tǒng)發(fā)出可能與行人碰撞的警告并在即將發(fā)生碰撞前通過制動干預(yù)提供支持。

5、后部碰撞預(yù)警
就是在檢測到即將被追尾的一瞬間,座椅頭枕會向前移1-2公分,貼近前排駕駛員和乘客的脖子,防止頸椎因追尾而折斷,這個防撞測試中叫防鞭打測試。
6、后部交叉行駛
若停車車頭朝里,旁邊兩邊都有車的情況下,你倒車出來,但是無法預(yù)判后方有無車輛和人員經(jīng)過,后方雷達會探明,并提醒。
7、側(cè)面防碰撞警告
70-120km/h范圍內(nèi)行駛,當車輛主動并入或其他車道有車輛并入接近時,通過矯正式正式轉(zhuǎn)向干預(yù)輔助保持安全距離,主動避免側(cè)面碰撞風險。

8、限速信息及交通標志識別
這個功能要搭配HUD,攝像頭識別路邊上的限速標志和各種交通標志,顯示在 HUD和儀表盤上。

十一發(fā)展歷史
其實巡航控制很早就有了,18世紀時誕生了最早版本的巡航控制,它的作用是為了阻止蒸汽機的運轉(zhuǎn)過快。后來,巡航控制系統(tǒng)被連接到速度表以及驅(qū)動軸上,用來計算行車速度,然后利用電腦控制油門來維持司機預(yù)先設(shè)定的速度。如今,這一切動作都被整合到一個小黑盒中——ECU。在減少駕駛員體力消耗的同時,巡航控制還能夠稍稍提高燃油經(jīng)濟性。

定速巡航最初流行起來是在美國,因為長直寬的洲際公路特別多,許多司機需要長途駕駛,為了減少駕駛疲勞,定速巡航就這么開始流行了。而在歐洲,因為小路多,轉(zhuǎn)彎多,定速巡航這一配置最早僅僅被看成是高端豪華車的象征。不過現(xiàn)在,定速巡航還是普及了起來,現(xiàn)代化的電子技術(shù)成本降低,使得這個當年豪車上的配置也裝備到了普通家用車中。
自適應(yīng)巡航系統(tǒng)的歷史可以追溯至上個世紀70年代。1971年,美國EATON(伊頓)公司便已從事這方面的開發(fā)。其雛形是日本三菱公司提出的PDC(Preview Distance Control)系統(tǒng),它將雷達與其他處理器結(jié)合在一起,可以偵測出車距變化,并對駕駛員發(fā)出警告,系統(tǒng)還可以控制節(jié)氣門開度調(diào)節(jié)發(fā)動機功率。此后豐田、本田、通用、福特、戴姆勒、博世等公司也投入到了研發(fā)行列。
1995年,三菱汽車首先在旗下提供一種叫做“預(yù)見式距離控制”系統(tǒng)。那是一種基于激光測距的ACC系統(tǒng),但整套系統(tǒng)只通過油門和檔位進行控制,并不進行剎車。基于激光的系統(tǒng)明顯比雷達為基礎(chǔ)的系統(tǒng)成本低,但基于激光在惡劣天氣條件下會受到很大影響。因此目前基本使用基于雷達的ACC系統(tǒng)。
1997年8月,豐田開始在雷克薩斯上使用“雷達巡航控制系統(tǒng)”,并且在2000年加入剎車功能,2004年加入“低速跟蹤模式”。低速跟蹤模式屬于一種額外的模式,需要駕駛員啟動,如果前車出現(xiàn)制動或者停下,該模式也可以讓車輛減速乃至停車,不過這套系統(tǒng)很快就被停用,估計是存在一定的設(shè)計漏洞,并不完善所致。
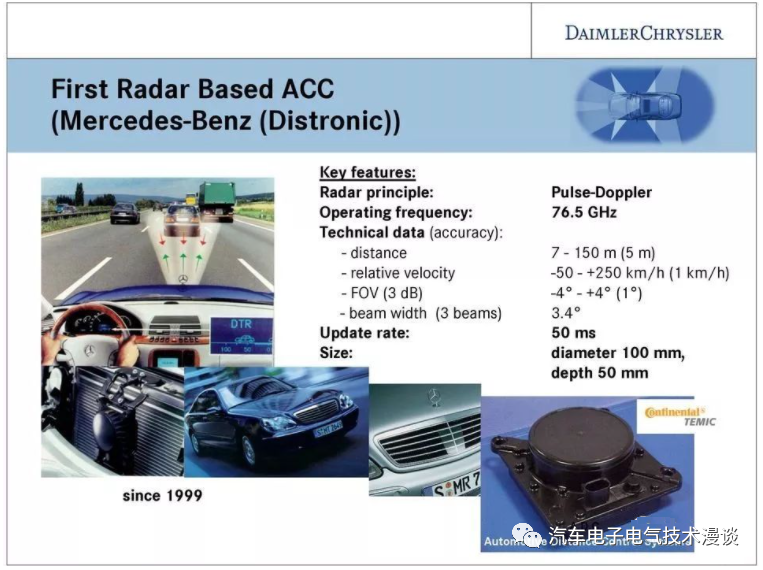
1998年底,奔馳在旗下S系車型中引入Distronic距離控制系統(tǒng),跟我們現(xiàn)在理解的自適應(yīng)巡航?jīng)]有太大的差別。
第一個問世的距離警告應(yīng)用是1999年奔馳S級的ACC系統(tǒng),當時使用了Temic(現(xiàn)在的大陸)的77GHz LRR,用于檢測與前車的距離并適時進行制動防止碰撞。
ACC首次配備于2003年型Audi A8車上。
2006年,奔馳進一步完善了該系統(tǒng),在必要的情況下能夠?qū)④囕v完全停止,因此又稱為增強型限距控制系統(tǒng)(DISTRONIC PLUS)。這個功能有點像現(xiàn)在沃爾沃倡導(dǎo)的全力制動系統(tǒng):在必要的時候全力剎車,直至車輛挺住。而奧迪在國外普遍使用博世提供的自適應(yīng)系統(tǒng)。包括A4、A6、A8和Q7都有配備。
在2006年,雷克薩斯將新一代ACC系統(tǒng)裝備在其旗艦車型LS460上。這套系統(tǒng)可以在0-100公里時速范圍內(nèi)工作,并且可以反復(fù)啟停,即使高速公路擁堵也可以應(yīng)付。
2010年,奧迪在A8上搭載了全球第一款具備GPS功能ACC系統(tǒng)。
2015年,隨著特斯拉ModelS的推出,ACC系統(tǒng)開始作為半自動駕駛進入普通大眾的視線。
以前的ACC僅用于在高速路行駛時調(diào)節(jié)速度,成本非常高,因為始終無法形成規(guī)模效益,雷達的成本高的嚇人,還有那時做自動制動的挑戰(zhàn)性比較大;ACC的控制通常設(shè)置為最大制動力的20%-50%,根本不適合在緊急場景下的制動。與其說是一項安全性功能,它的設(shè)計和銷售方向更像是舒適/便利性功能。過了十年后這項應(yīng)用也僅限于部分高端車型。
另外,由于ACC和AEB需求的增加,電子制動輔助(EBA)和電子制動分配(EBD)的搭載量也隨之提高了。2018年EBA和EBD的滲透率在日本分別為94%和96%,北美分別為97%和99%,歐洲更是兩者都100%。一些液壓制動助力也已經(jīng)被電動的替換,并且隨著動力系統(tǒng)的電動化,制動再生也越來越多應(yīng)用于電機和起動發(fā)電機等中。
全自動駕駛汽車在未來幾年中一定會普及到我們身邊來,其實,自動駕駛汽車的一些基本科技配置在我們現(xiàn)在的許多車型上已經(jīng)有配備了。比如自適應(yīng)巡航系統(tǒng),幾乎成了豪華車的標配。曾經(jīng)高大上的ACC,現(xiàn)在已經(jīng)下探到了20萬元以下市場,成本的降低,使得ACC將得到進一步地普及。
十二 發(fā)展趨勢
1、傳感技術(shù):
體積:更加緊湊,集成程度更高的器件,體積至少小一半
識別范圍:擴大一倍
2、功能完善:
變化車道和過彎道時控制性能更和諧。
3、高集成化:
降低成本、增強各系統(tǒng)內(nèi)在聯(lián)系,信息共享率提高,提高整個系統(tǒng)的穩(wěn)定性和可靠性。
4、全速范圍內(nèi)的自動起步技術(shù)
如今,ACC在V<30km/h的稠密交通下會自動關(guān)閉。
將來,全速范圍內(nèi)的自動起步技術(shù)使得ACC能夠在近距離內(nèi)快速識別前方障礙物,當前方車輛再次起步時,可以利用影像系統(tǒng)得到信息,使得在沒有駕駛員參與的情況下自動起步。
5、性能要求:
更好的近距離探測能力、更快的信號處理能力、更迅速的系統(tǒng)反映。
如此,即使堵車也無需駕駛員參與,有無人駕駛的前奏。
6.多傳感器融合
協(xié)同合作、判斷邏輯更加智能將幫助自適應(yīng)巡航系統(tǒng)更“聰明”。譬如部分奧迪車型搭載的自適應(yīng)巡航系統(tǒng),在車輛進入彎道時,處理模塊將傳感器收集到的信息與車道保持系統(tǒng)收集到的信息一同判斷,規(guī)劃出車輛的行駛軌跡。這樣就可以掃描到前面轉(zhuǎn)彎的車輛,避免突然加速或減速的情況。
未來的自適應(yīng)巡航系統(tǒng)更為智能,當車輛進入彎道時,系統(tǒng)會把傳感器收集到的信息與車道保持系統(tǒng)收集到的信息一同處理,根據(jù)目前車輛的轉(zhuǎn)彎半徑與已經(jīng)確定的車道平均寬度模擬處虛擬車道。

7、進階為協(xié)同自適應(yīng)巡航 自適應(yīng)巡航已經(jīng)在很多高端車輛上實現(xiàn)了搭載,但由于自身缺陷,無法完全滿足自動駕駛的需求,在多變的道路狀況下,如何解決自適應(yīng)巡航系統(tǒng)對旁邊車道及彎道等環(huán)境下的監(jiān)測,成為了需要解決的問題,隨著智能網(wǎng)聯(lián)的出現(xiàn),協(xié)同自適應(yīng)巡航的概念也被提出。 協(xié)同自適應(yīng)巡航就是在自適應(yīng)巡航的基礎(chǔ)上,讓汽車與道路固定設(shè)施或其他車輛之間進行信息交互,進一步實現(xiàn)更有效的行車控制。協(xié)同自適應(yīng)巡航是智能網(wǎng)聯(lián)下的體現(xiàn),通過與集成衛(wèi)星、道路信號量、路邊基礎(chǔ)設(shè)施、路邊信號標志、移動基礎(chǔ)設(shè)施或其他車輛提供的信息,可以在各道路情況下實現(xiàn)自適應(yīng)巡航,也可以確保自適應(yīng)巡航過程中的安全性。這將是未來發(fā)展的一種趨勢。 雖然ACC(自適應(yīng)巡航控制系統(tǒng))工作方式越來越復(fù)雜,但操作卻越來越簡便。 而隨著技術(shù)的越來越成熟,智能化程度越來越高,未來汽車ACC系統(tǒng)將同其他的汽車電子電控系統(tǒng)相互融合,形成智能汽車電子控制系統(tǒng),在衛(wèi)星導(dǎo)航系統(tǒng)的指引下,與城市安全系統(tǒng)有效結(jié)合,利用環(huán)境感知技術(shù)和網(wǎng)絡(luò)通信技術(shù),實現(xiàn)自動駕駛功能,全自動駕駛汽車一定會成為未來不可改變的大趨勢。
審核編輯 :李倩
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6605瀏覽量
110581 -
ACC
+關(guān)注
關(guān)注
1文章
57瀏覽量
22747
原文標題:五萬字一文讀懂 汽車自適應(yīng)巡航控制系統(tǒng)(ACC)下篇
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
空間光調(diào)制器自適應(yīng)激光光束整形
步進電機如何自適應(yīng)控制?步進電機如何細分驅(qū)動控制?
偏置備用運行中自適應(yīng)定時控制裝置的分析與風險評估

如何在自己的固件中增加wifi自適應(yīng)性相關(guān)功能,以通過wifi自適應(yīng)認證測試?
現(xiàn)場總線控制系統(tǒng)與集散控制系統(tǒng)的對比
電機控制系統(tǒng)的神經(jīng)網(wǎng)絡(luò)優(yōu)化策略
前饋控制系統(tǒng)與反饋控制系統(tǒng)的區(qū)別
自動控制系統(tǒng)的組成環(huán)節(jié)及其作用
基于非線性自適應(yīng)學習控制器的四軸飛行器避障方案
什么是自適應(yīng)光學?自適應(yīng)光學原理與方法的發(fā)展
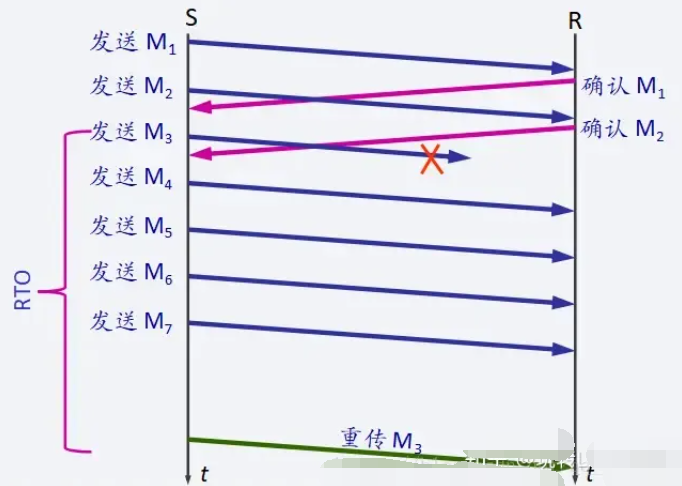
TCP協(xié)議技術(shù)之自適應(yīng)重傳
智能控制系統(tǒng)的主要類型有哪些?
Spring Boot和飛騰派融合構(gòu)建的農(nóng)業(yè)物聯(lián)網(wǎng)系統(tǒng)-改進自適應(yīng)加權(quán)融合算法
Versal自適應(yīng)SoC系統(tǒng)集成和 確認方法指南
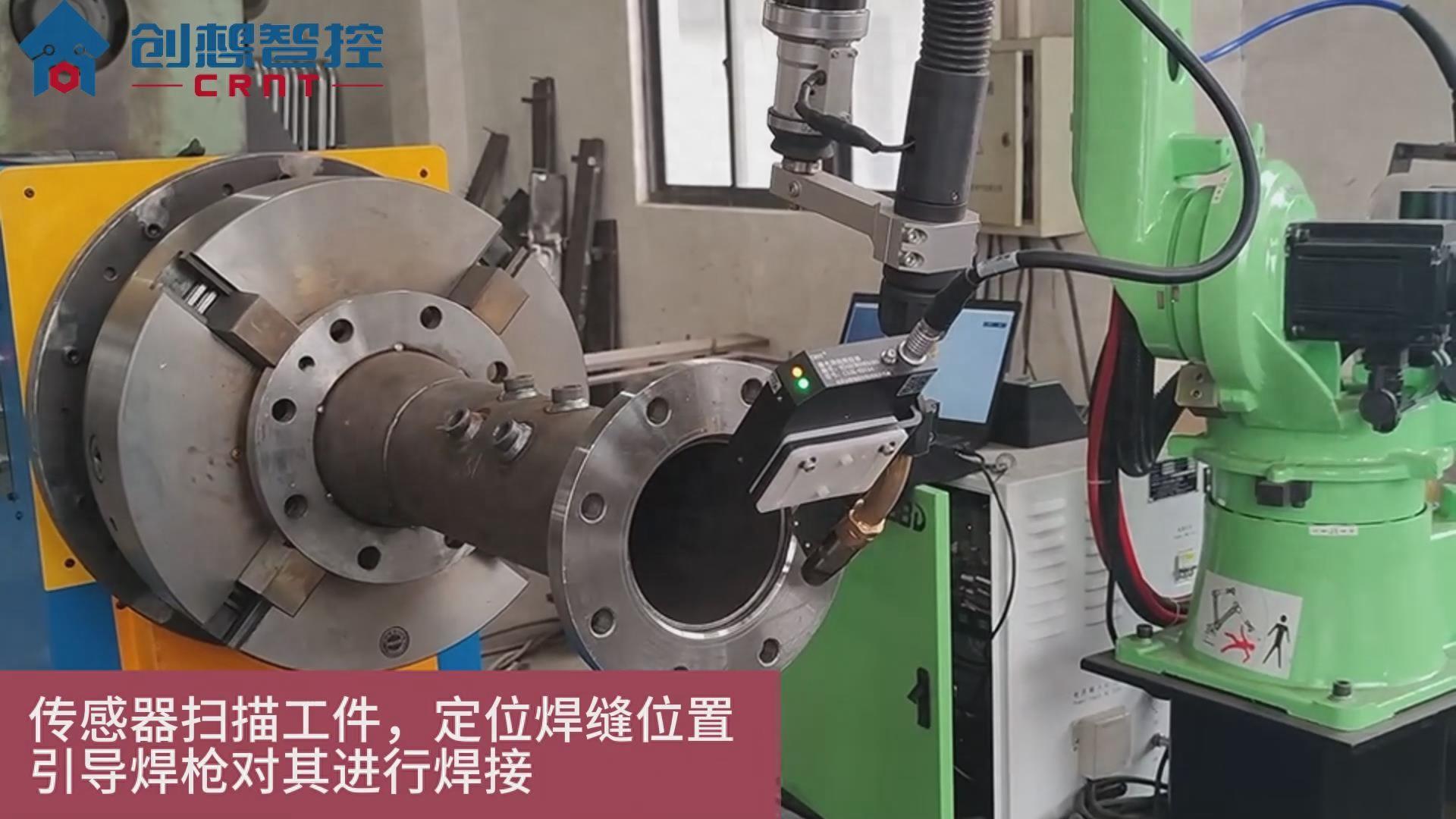
創(chuàng)想焊縫跟蹤系統(tǒng)在爾必地機器人自適應(yīng)焊接中的應(yīng)用案例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論