 高速ADC精度的直流誤差類型
高速ADC精度的直流誤差類型
在任何設計中,信號鏈精度分析都是一項艱巨的任務。在本系列的第2部分中,討論了許多誤差,這些誤差會在整個信號鏈中累積,最終被轉換器看到。請記住,轉換器是信號鏈的瓶頸,最終決定信號的表示精度。因此,選擇轉換器是設置整體系統要求的關鍵。本文將繼續以這些知識為基礎,分析在整個給定信號鏈中可能累積的直流誤差類型。
兩種類型的誤差可以通過信號鏈累積:直流和交流。直流或靜態誤差(如增益和失調)有助于了解信號鏈的精度或靈敏度。交流誤差(也稱為噪聲和失真)決定了系統的性能和動態范圍
。理解兩者都很重要,因為它們最終都決定了系統的分辨率。
本文將專門分析直流誤差,分解與無源和有源器件相關的每個不準確性。將開發一個矩陣或電子表格,以顯示如何通過不同的方法在信號中添加或累積誤差。
本文回顧噪聲基礎知識,例如從交流角度進行帶寬求和和誤差累積,可以確定模擬信號鏈設計的整體SNR。
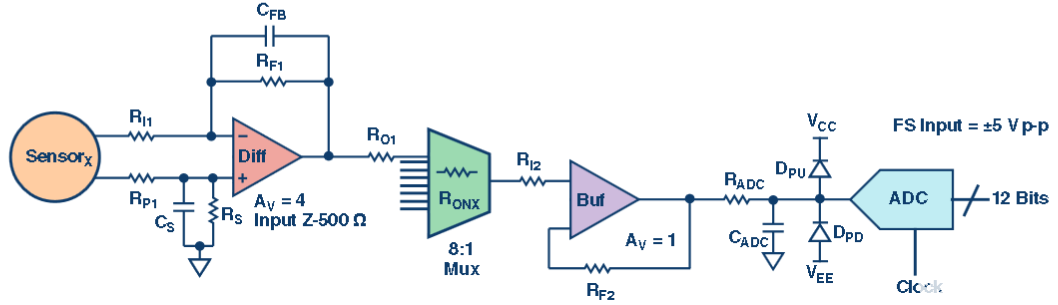
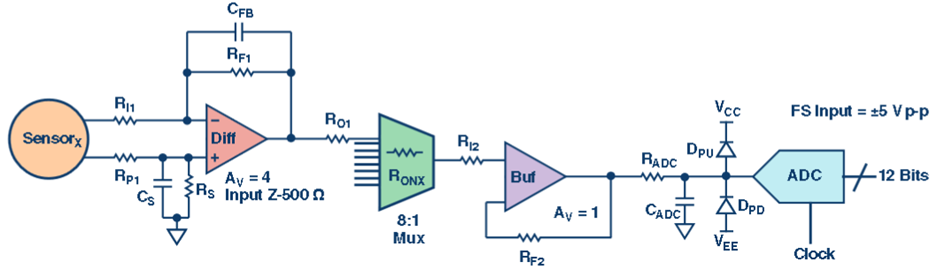
圖1.這種簡單的數據采集信號鏈系統旨在提供0.1%的精度。
信號鏈回顧
在第 2 部分中,目標是設計一個簡單的數據采集系統,其精度可達 0.1%(圖 1)。這意味著每1 V輸入,輸出為0.99388 V或1.00612 V。因此,假設滿量程為10 V,轉換器的動態范圍為60 dB或9.67ENOB。它具有兩級放大器、一個多路復用器和一個模數轉換器(ADC)。傳感器、電纜、連接器、印刷電路板(PCB)寄生效應以及任何外部影響/誤差將在此分析中被忽略,因為這在很大程度上取決于設計人員試圖測量的應用或信號。
要為每個錯誤定義參考,分析的每個階段都應分解為單獨的部分。數據采集信號鏈的第一級是一個簡單的差動放大器(圖 2)。該放大器的增益為4×,輸入阻抗為500 Ω。電容器已就位,用于可選的濾波目的。
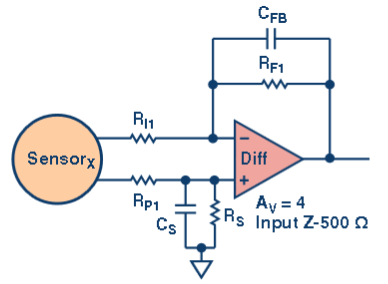
圖2.差動放大器是數據采集信號鏈的第一級。
然后將放大器的輸出信號施加到多路復用器的八個輸入之一(圖 3)。每個輸入由一個阻尼電阻(RO),以最大程度地減少多路復用器通道切換帶來的電荷反沖。每個通道內部都會有一些寄生或表征的RO根據多路復用器的數據手冊規格。
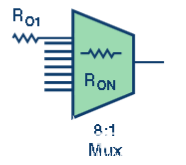
圖3.這款 8:1 多路復用器具有 8 個緩沖輸入。
然后,產生的通道信號被施加到單位增益緩沖級放大器(圖 4)。施加電阻以最大限度地減小輸入偏置電流不平衡。
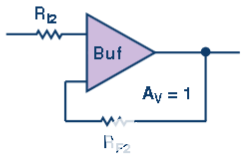
圖4.通道信號將施加到這種類型的緩沖放大器上。
信號緩沖后,將其施加到 12 位、1 MSPS ADC,最終進入數字域(圖 5)。串聯電阻用于緩沖或阻尼放大器和轉換器之間的信號,從而增加兩個器件之間的源電阻。這最大限度地減少了從轉換器到放大器的電荷反沖,就像多路復用器一樣。這也有助于放大器輸出穩定并防止其振蕩。
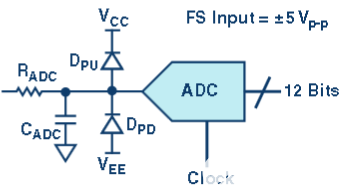
圖5.信號經過緩沖后,將其施加到12位、1 MSPS ADC。
該電容提供一個簡單的低通抗混疊濾波器(AAF),用于衰減目標頻帶外的信號和噪聲。AAF 的設計在很大程度上取決于系統的設計和應用。最后,上拉二極管和下拉二極管增加了輸入保護,使其免受可能施加于轉換器輸入的極端信號過載條件的任何故障條件的影響。
現在,所有信號鏈組件都已定義,讓我們開始查看與每個階段相關的誤差。在以下部分中,將根據此處討論的信號鏈的每個階段來審查無源和有源誤差。
直流無源錯誤
所有無源元件都有與之相關的誤差,尤其是電阻器。電阻器看似簡單的器件,但如果設計中沒有正確指定,它們可能會在整個信號鏈中引起誤差。此處不涉及選擇正確類型的電阻器及其組成。但請記住,根據應用的不同,某些電阻類型可能比其他類型更適合。
電阻直流誤差由非理想電阻容差引起。僅指定值容差是不夠的。然而,對電阻誤差容限過于嚴格也會導致收益遞減,并使分析過于復雜。在為給定信號鏈指定電阻類型時,至少需要注意四個關鍵規格:
值容差,通常以 % 指定。
溫度系數或漂移,通常以ppm/°C為單位。
生命漂移或資格,通常以 % 為單位指定,超過設定的量 小時(通常在 1000 秒內)。
值公差比,當兩個或更多時以%為單位指定的值公差 電阻器存在于網絡或同一封裝中,并且匹配 在價值上。
為了舉例說明電阻誤差是如何累積的(圖6),讓我們看一下以下內容:一個100 Ω電阻,值容差為1%,漂移為100 ppm/°C,壽命容差為5%,在85°C溫度范圍內,在5000小時的使用壽命內,電阻為93.15 Ω至106.85 Ω:
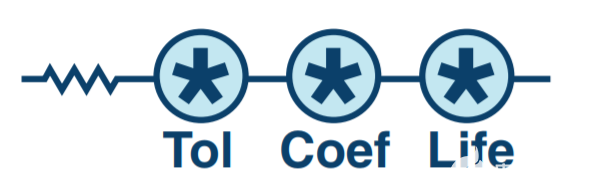
圖6.此圖說明了電阻誤差模型。
總公差 (R價值( 1托爾( 1科夫( 1生命) = (R價值+ ((R托爾/100) × R價值)+ (((R科夫× 0.000001) ×溫度范圍) ×R價值) + ((R生命/100) × R價值))= 94 Ω 到 106 Ω。
很難找到信息 旁注:某些組件的使用壽命規格僅為 1000 小時。然而,設計可能需要更長的時間——比如10,000小時。要解決這個問題,不要將 1000 小時的數字乘以 8.77(8766 小時/年);這太悲觀了。任何精密模擬電路中的長期漂移都會有一定程度的“隨機游走”。取這個數字的平方根或 √8.766 = ~3× 1000 小時數字更正確。因此,10,000 小時壽命數字為 √10.000 = 3.16 × 1000 小時規格,依此類推。
應該注意的是,電容器和電感器也有誤差。然而,這些誤差通常可以忽略不計,對這種類型的直流分析沒有實質性價值。這些器件本質上也是無功的,對濾波和帶寬容差的影響最大,這同樣不適用于此特定的直流分析。
直流主動誤差
圖1中描述的信號鏈具有最常見的構建模塊,描述了一種實現數據采集系統的方法。它由兩個放大器、一個多路復用器和一個ADC組成。但請記住,許多類型的有源器件描述各種信號鏈和不同的系統拓撲。在實施此類分析時,所有有源器件都會有某種直流誤差。重要的是要確定需要考慮哪些錯誤,以了解所設計系統的準確性。
基本上,直流精度涉及兩種類型/組的誤差。這些錯誤對于所有活動設備都是單獨的和全局的。單個活動設備錯誤將僅顯示相對于該設備的已知直流誤差。此類誤差可在各自的數據手冊中找到。例如,放大器的輸入失調電壓將被視為單個誤差,因為該誤差僅特定于該有源器件。
信號鏈或系統中的每個有源器件的全局誤差相同,但根據有源器件的個別性能,全局誤差會有所不同(圖 7)。一個全局誤差示例是總線電源和溫度的線路調節。現在,讓我們分解信號鏈中顯示的三個有源器件的這些誤差。
眾所周知,放大器仍然遠非理想。它們有許多誤差,通常在數據手冊中列出。失調電壓和偏置電流是兩個常見誤差,但包括任何漂移誤差、長期誤差和隔離誤差(如電源抑制比(PSRR))也很重要。表1列出了使用放大器時應考慮的以下誤差。
| 規范 | 錯誤 |
|
輸入失調電壓漂移 (V/C) |
3.50 × 10–6 |
| 輸入偏置電流漂移 (交流) | 200 × 10–15 |
| 輸入偏置電流 (A) | 150 × 10–9 |
| 長期漂移(1000小時)(V) | 3.75 × 10–3 |
| 輸入失調電流 (A) | 10 × 10–9 |
| 電源抑制比(PSRR)(dB) | –120 |
| 輸入失調電壓 (V) | 200 × 10–6 |
| 共模抑制比(分貝) | –80 |
多路復用器的誤差通常比放大器少。導通電阻和通道隔離是影響最大的多路復用器直流誤差。表 2 列出了使用多路復用器時應考慮的錯誤。
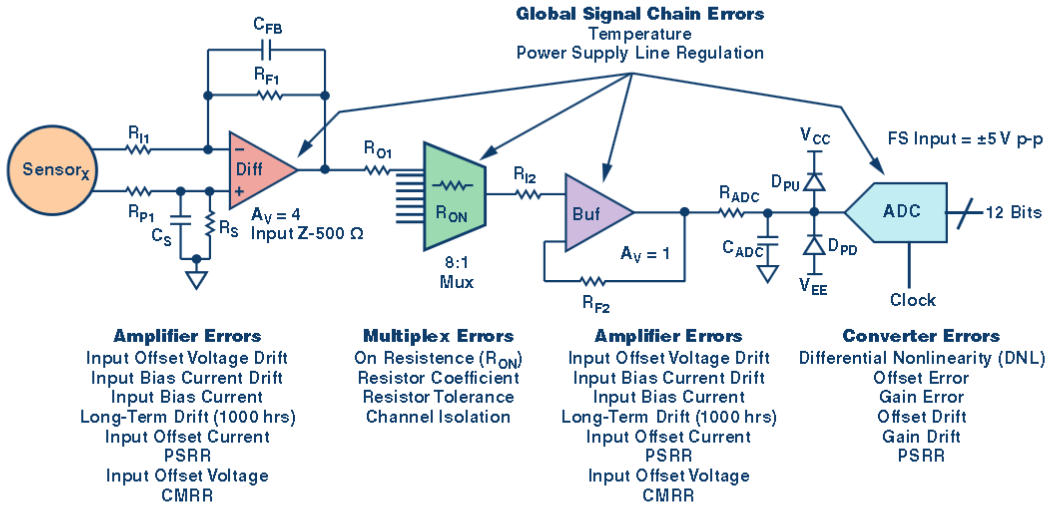
圖7.有源器件存在兩種類型的直流精度誤差 - 單個和全局。
| 規范 | 錯誤 |
| 導通電阻 (R上5(5) | 400.00 |
| 電阻系數(ppm/°C) | 200.00 |
| 電阻容差 (%) | 20.00 |
| 通道隔離 (dB) | –70.0 |
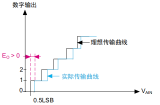
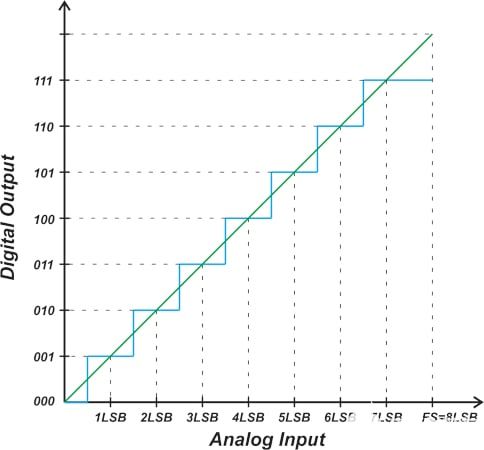
本系列的第一部分專門回顧了轉換器誤差(如下所示)。偏移、增益和 DNL 是眾所周知且易于理解的。包括 PSRR 也很重要。使用第1部分的ADC時,應考慮以下轉換器誤差列表:
相對精度,DNL,定義為±0.5 LSB。
相對精度溫度系數,DNL 溫度系數,通常包含在 數據手冊中的相對精度規格。
增益溫度系數誤差,為±2.5 LSB(來自上一個示例)。
偏移溫度系數誤差,比上一個示例±1.3 LB)。
電源靈敏度,通常以第一奈奎斯特區內的低頻PSRR形式出現;對于 12 位,這通常可以表示為 60 dB 或 ±2 LSB 模數轉換器。
為了使本文保持在合理的長度,本討論將不詳細介紹這些錯誤中的每一個是如何在有源設備本身中派生的。所有這些錯誤在各種論文和文本中都有明確的定義和描述。這里需要注意的重要一點是,所有基本誤差都已考慮在內,以便分析足夠穩健,可以滿足系統的精度目標規格。
已建議并定義了單個活動設備錯誤。現在應考慮全局誤差,這些誤差會影響整個信號鏈(表3)。在這個簡單的示例中,只有溫度和線路調整率將作為全局誤差考慮在分析中。但是,添加特定應用程序或設計可能固有的任何其他外部影響非常重要。
| 規范 | 錯誤 |
| 溫度(°C) | –45 至 +85 |
| 電源線路調節 (%/V) | 50 × 10–3 |
將一切整合在一起
既然所有誤差都已主動和被動定義,那么是時候將它們放入電子表格中以計算信號鏈的直流精度了。表 4 顯示了完成此任務的一種此類方法。
盡管分析信號鏈精度的方法有很多種,但使用電子表格方法提供了最大的靈活性。它還提供了有關如何在信號鏈設計中壓縮所有這些錯誤數的可靠理解。這種方法使設計人員能夠在設計中可能考慮的許多合適器件之間快速有效地權衡。
花點時間制作一個布局良好且有序的電子表格。在頂部,定義了全局誤差和信號鏈規格,因為這些數字會影響整個信號鏈的性能。放大器規格/誤差也放在頂部,因為整個信號鏈中存在許多誤差和兩個放大器級。
繼續向下,在電子表格的左側,所有錯誤都分為每個電路階段。電阻誤差也按每級分組,以相應地了解權衡取舍。右側顯示了信號流入和流出每個階段時的連續計算和誤差累積。
在計算中,所有誤差都以電壓格式輸入。這使得它更容易,因為轉換器位于信號鏈的末端,并且具有以電壓描述的輸入滿量程。RTO(指輸出)用于描述從一個階段到下一個階段的連續錯誤累積。每個階段還生成單獨的總和 RSS(平方根)總計,以顯示錯誤如何根據所使用的方法累積。
因此,表4中的最終結果顯示總累積誤差為±2.6%,RSS誤差為±1.6%。這是針對本文中討論的整個信號鏈,考慮到每個器件的數據手冊規格以及前面所述的26°C全局條件。
總累積
精度可以通過多種方式計算,并且可以采取多種形式。根據設計人員如何看待這一點,應理解并記錄它,以避免產生任何錯誤的結果。請記住,從第 1 部分開始,簡單地取所有這些誤差源的和方根 (RSS) 似乎過于悲觀。然而,統計容差可能過于樂觀(誤差總和除以誤差數)。找到整個信號鏈誤差的實際容差應該介于這兩種想法或方法之間。
因此,在整個信號鏈或任何精度系統分析中添加(累積)精度誤差時,設計人員可以使用加權誤差源方法(如第1部分的ADC示例所示),然后將這些誤差源RSS在一起。這將為確定整個信號鏈的整體誤差提供最佳方法。
結論
被動和主動設備都會發生許多錯誤。并非所有都很重要,但請記住那些對手頭的信號鏈應用很重要。并非所有錯誤都對每個應用程序都有效。確定哪些誤差最主要,哪些誤差的影響或權重最大,對于任何直流精度誤差分析都至關重要。本文開發了一個電子表格,以顯示本文中的信號鏈示例如何滿足<±2.0%精度的要求。
選擇合適的無源器件可以對信號鏈和有源器件中的總累積誤差產生同樣大的影響。創建和分區電子表格可以簡單而整潔地快速考慮許多不同的設備和權衡。最后,誤差累積可以采取多種形式,最常用的做法是RSS精度方法。
然而,有些人可能會爭辯說,誤差的加權求和方法是確定真正的“最壞情況直流誤差”的正確方法。否則,這很容易導致信號鏈被過度設計,導致更多的部件來補償原始的一組誤差。更不用說成本的增加以及設計的尺寸、重量和功耗(SWaP)。
| 信號鏈規格 | 價值 | 規范 | 最低 | 單位 | 最大 | |
| 輸入信號(V) | 1 × 101 | 放大器規格 | ||||
| ADCNumber of Bits | 1.2 × 101 | 輸入失調電壓漂移(V/C) | 3.5 × 10–6 | V | 3.50 × 10–6 | |
| ADCInput 滿量程(差分 VP-P)帶邊距 | 9.97 × 100 | 輸入偏置電流漂移(交流) | 2 × 10–13 | 一個 | 2 × 10–13 | |
| ADCInput 滿量程(差分 VP-P) | 1 × 100 | 輸入偏置電流 | 1.5 × 10–7 | 一個 | ||
| ADCLSB尺寸(VP-P) | 2.44 × 10–3 | 長期漂移(V) (5000小時) | 3.75 × 10–3 | V | ||
| 溫度范圍(–50°C 至 +80°C) 1 = 26°C | 1 × 100 | 輸入失調電流(A) | 1 × 10–8 | 一個 | ||
| 開爾文(K) | 2.9915 × 102 | PSRR (dB) | –1.2 × 102 | V | 3.50 × 10–9 | |
| 玻爾茲曼常數(W-s/K) | 1.38 × 10–23 | 輸入失調電壓(V) | 2 × 10–4 | V | ||
| LDO法規值(%/V) | 5 × 10–2 | 1圣階段共模抑制比(分貝) | –8 × 101 | V | 5 × 10–4 | |
| 1圣級放大器 CMR(V) | 5 × 100 | ADC緩沖共模抑制比(dB) | –8 × 101 | V | 5 × 10–4 | |
| 放大器緩沖器 CMR(V) | 5 × 100 | En_op(V/√Hz) | 6 × 10–9 | V | 3.36 × 10–6 | |
| 電源電壓 | 7 × 100 | In_op(納安/√赫茲) | 8 × 10–13 | 一個 | 4.4829 × 10–10 | |
| 帶寬(赫茲) | 2 × 105 | 噪聲電壓(VP-P) | 1.5 × 10–7 | V | 5.303 × 10–8 | |
| 諾西帶寬(赫茲)—1圣-訂單系統 | 3.14 × 105 | |||||
| 諾西帶寬(Hz)—二階系統 | 2.444 × 105 | |||||
| 輸入 | 最低 | 單位 | 最大 | |||
| 1圣級放大器電路—差動放大器 | 總公差(RF1( 1托爾( 1科夫( 1生命) | 2.48122 × 104 | Ω | 2.49878 × 104 | ||
| 放大器增益(Av) | 1 × 100 | 總公差(RF1( 1托爾( <>科夫( 1生命) | 2.48745 × 104 | Ω | 2.49878 × 104 | |
| RI1(Ω) | 2.49 × 104 | 總公差(R小一( <>托爾( <>科夫( <>生命) | 1.24217 × 104 | Ω | 1.24939 × 104 | |
| RF1(Ω) | 2.49 × 104 |
總公差(RO1( <>托爾( <>科夫( <>生命 |
9.96475 × 101 | Ω | 1.003525 × 102 | |
| R小一(Ω)= RI1||RF1 | 1.245 × 104 | 總容差(增益 = RF1/RI1) | 9.954660 × 10–1 | 獲得 | 1.0071 × 100 | |
| RO1(Ω) | 1 × 102 | 信號電平 | 9.9547 × 10 | V | 1.00707 × 101 | |
|
電阻系數(ppm/°C) |
2.5 × 102 | 輸入電流失調 × R小一—反收購 | 8.748575 × 10–7 | V | 8.839525 × 10–7 | |
| 電阻容差(%) | 1 × 10–1 | 輸入失調電壓 — RTO | 4.060773 × 10–4 | V | 4.084398 × 10–4 | |
| 電阻壽命容差(%),5000小時 | 2.5 × 10–1 | 輸入偏置誤差 — RTO | –2.16197 × 10–5 | V | 2.17455 × 10–5 | |
| 1圣載物臺總精度誤差(總和) | 1.3831 × 10–3 | V | 1.4346 × 10–3 | |||
| 1圣載物臺總精度誤差(RSS) | 1.0774 × 10–3 | V | 1.0837 × 10–3 | |||
| 信號電平(總和) | 9.9560 × 100 | V | 1.00722 × 101 | |||
| 信號多路復用器 | 信號電平 | 9.9557 × 100 | V | 1.00718 × 101 | ||
| R上(Ω) | 4 × 102 | 總公差(R上( <>托爾( <>科夫) | 3.199200 × 102 | Ω | 4.8008 × 102 | |
| 電阻系數(ppm/C) | 2 × 102 | 通道間隔離誤差 | 1.5811 × 10–3 | V | 1.5811 × 10–3 | |
| 電阻容差(%) |
2 × 101 |
|||||
| 通道隔離(分貝) | –7 × 101 | |||||
| 放大器緩沖電路 | ||||||
| 電阻系數(ppm/C) | 2.5 × 101 |
總公差(RI2( <>托爾( <>科夫( <>生命) |
55.9426 × 104 | Ω | 5.60574 × 104 | |
| 電阻容差(%) | 1 × 10–1 | 總公差(RF2( <>托爾( <>科夫( <>生命) | 5.61424 × 103 | Ω | 5.62576 × 104 | |
| 電阻壽命容差(%),5000小時 | 2.5 × 10–1 | 總容差(增益 = RF2/RI2) | 1.0015 × 100 | 獲得 | 1.0056 + × 100 | |
| 單位增益緩沖器(Av) | 1 × 100 | 信號電平(總和) |
9.9727 × 100 |
V | 1.01305 × 101 | |
| RI2(Ω) | 5.6 × 104 | 信號電平 | 9.9724 × 100 | V | 1.01301 × 101 | |
| RF2(Ω) | 5.62 × 104 | 輸入電流失調 × RI2—反收購 | 2.805049 × 10–4 | V | 2.805039 × 10–4 | |
| R模數轉換器(Ω) | 3.32 × 101 | 輸入失調電壓 — RTO | 3.9595 × 10–3 | V | 3.9758 × 10–3 | |
| RE1(Ω), (二極管電阻) | 1 × 10–1 | 輸入偏置誤差 — RTO | 1.56844 × 10–5 | V | 7.43156 × 10–5 | |
| RE2(Ω),(二極管電阻) | 1 × 10–1 | ADC緩沖器總精度誤差(總和) | 4.7564 × 10–3 | V | 4.8334 × 10–3 | |
| ADC緩沖器總精度誤差(RSS) | 4.0009 × 10–3 | V | 4.0179 × 10–3 | |||
| 信號電平(總和) | 9.9775 × 100 | V | 1.01353 × 101 | |||
| 信號電平 | 9.9764 × 100 | V | 1.01342 × 101 | |||
| 模數轉換器電路 | ||||||
| 線性度,INL(LSB)– 1.5 = DS | 1.5 × 100 | V | 3.6621 × 10–3 | |||
| 失調誤差 (LSB) – 10 = DS | 1 × 101 | V | 2.44141 × 10–2 | |||
| 增益誤差(%FSR)– 0.1 = DS | 1 × 10–1 | V | 1 × 10–2 | |||
| 失調漂移(ppm/C)– 30 = DSFT | 3 × 101 | V | 3 × 10–4 | |||
| 增益漂移(ppm/C)– 40 = DSFT | 4 × 101 | V | 4 × 10–4 | |||
| PSRR(dB)– 5 LSB = DSFT | –6 × 101 | V | 3.5 × 10–6 | |||
| 時鐘速率,Fs(Hz) | 4 × 105 | ADC總精度誤差 | V | 2.66403 × 10–2 | ||
| 理想的 12 位信噪比(dB) | 7.4 × 101 | 總精度誤差(求和) | 3.43610 × 10–2 | V | 3.44895 × 10–2 | |
| 數據表 最小辛納德 FS(dB) | 6.5 × 101 | 總精度誤差 | 2.7007 × 10–2 | V | 2.70097 × 10–2 | |
| 數據表 ENOB(位) | 1.05 × 101 | 信號電平(求和) | 1.00041 × 101 | V | 1.01620 × 101 | |
| 信號電平 | 1.00031 × 101 | V | 1.01608 × 101 | |||
| 直流精度(± – %) | 1.5774 × 100 | % |
審核編輯:郭婷
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753082 -
轉換器
+關注
關注
27文章
8694瀏覽量
147087 -
adc
+關注
關注
98文章
6495瀏覽量
544467
發布評論請先 登錄
相關推薦
ADC模塊誤差的定義、影響和校正方法分享
ADC失調誤差和增益誤差
影響單片機ADC轉換精度的主要誤差
量化高速ADC轉換誤差率的頻率和幅度設計
高速、高精度頻率采樣中的量化誤差分析
高速模數轉換器精度透視中的直流誤差分析

如何量化高速ADC轉換誤差率的頻率和幅度
一般靜態模數轉換器不精度誤差和涉及帶寬的ADC不精度誤差






 工商網監
工商網監
評論