") ESP8266無人機(jī)原理圖+PCB合集
ESP8266無人機(jī)原理圖+PCB合集
以前寫過一個(gè)ESP8266做的飛控,但是一直不會(huì)設(shè)計(jì)PCB,最近學(xué)會(huì)了。就蠢蠢欲動(dòng)了,不過在設(shè)計(jì)以前正經(jīng)的教程沒有幾個(gè)。。。我找遍全網(wǎng)把ESP8266為主控的無人機(jī)項(xiàng)目都做了一次梳理。
現(xiàn)在作為廉價(jià)的配置就是ESP8266(樹莓派Pico)+MPU6050+MOSx4(Si2302 )+LDO。然后原理圖已經(jīng)繪制完畢,接下來的問題就是PCB的布局,以及一些附件的添加。
其實(shí)Pico的成本也不高,就是沒有人愿意開這個(gè)頭。
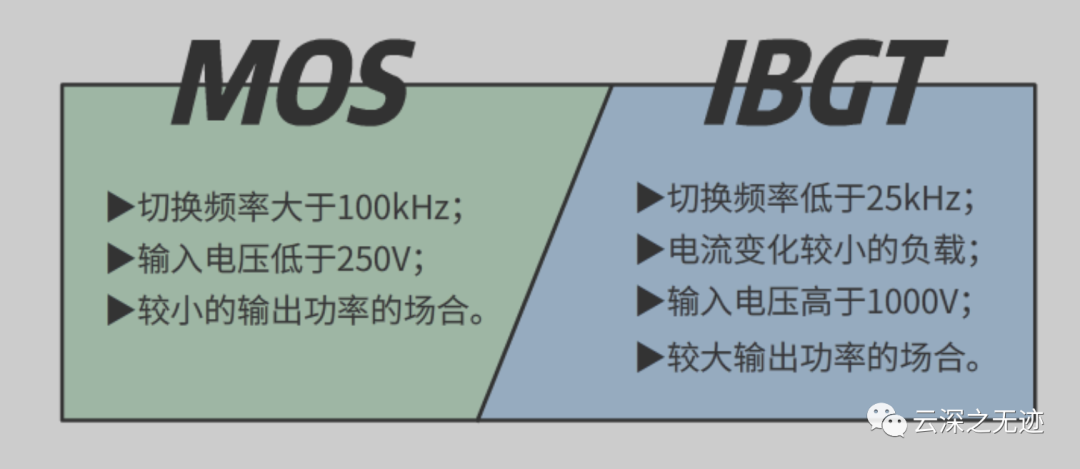
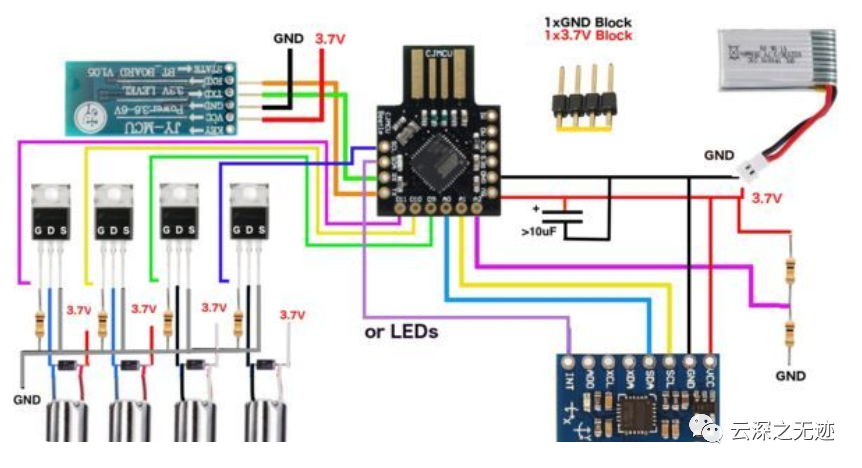
在驅(qū)動(dòng)部分都是使用的MOS管,但是可能會(huì)買到質(zhì)量不好的,這個(gè)需要看命了:
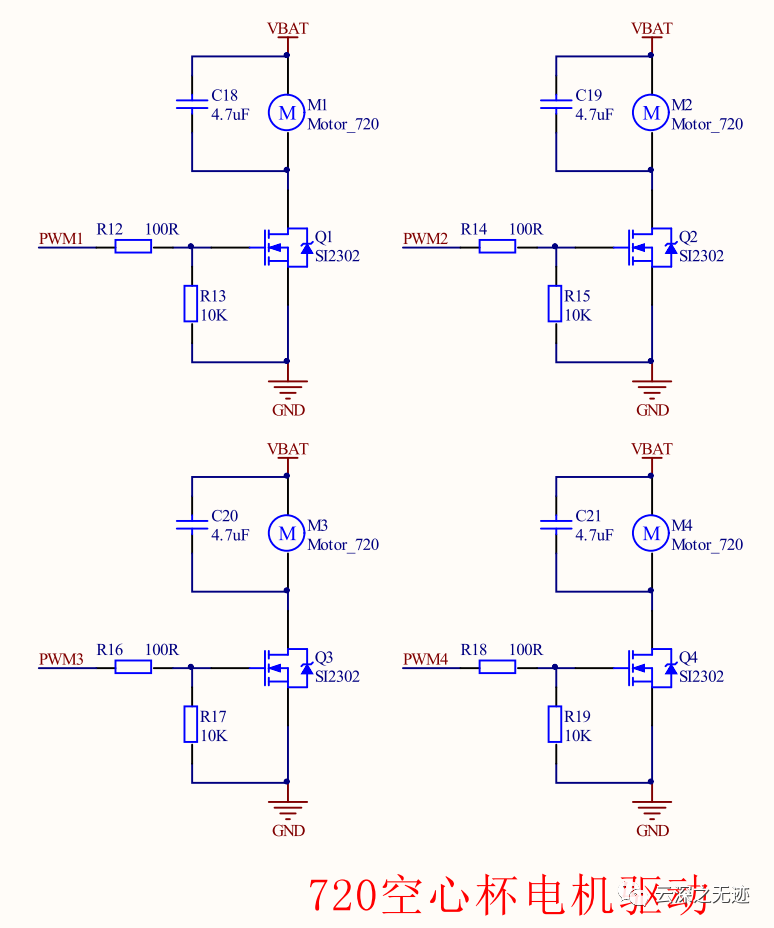
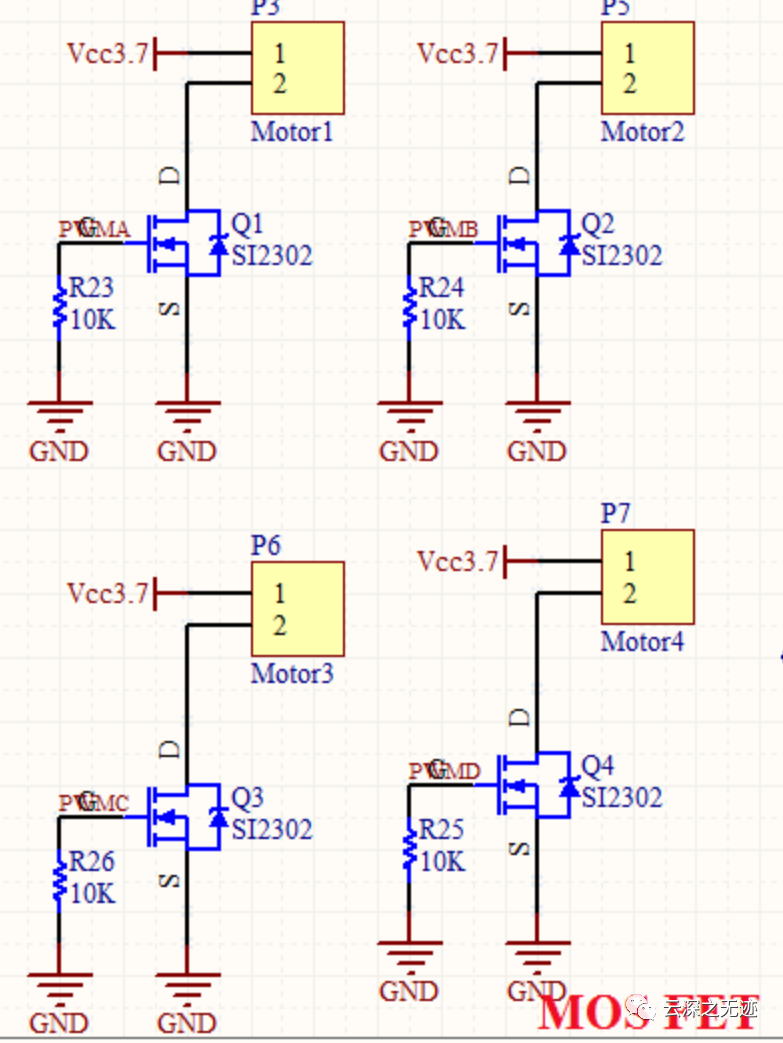
這個(gè)是一個(gè)常用的驅(qū)動(dòng)電路
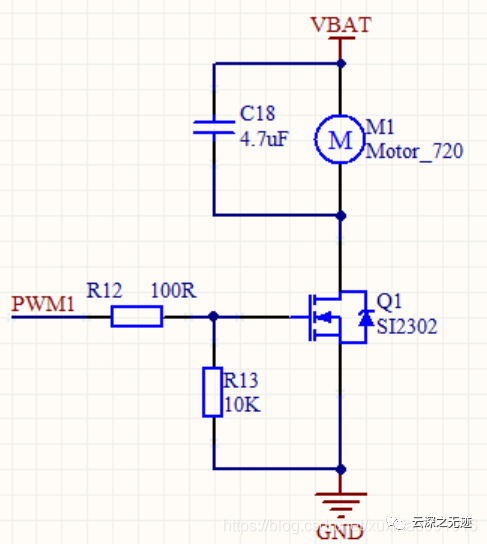
單個(gè)電路原理
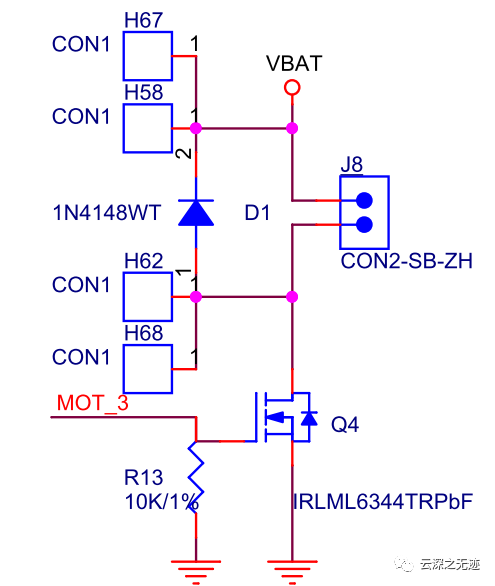
這個(gè)是ESP32 無人機(jī)的一個(gè)MOS驅(qū)動(dòng),大同小異的,也可以使用
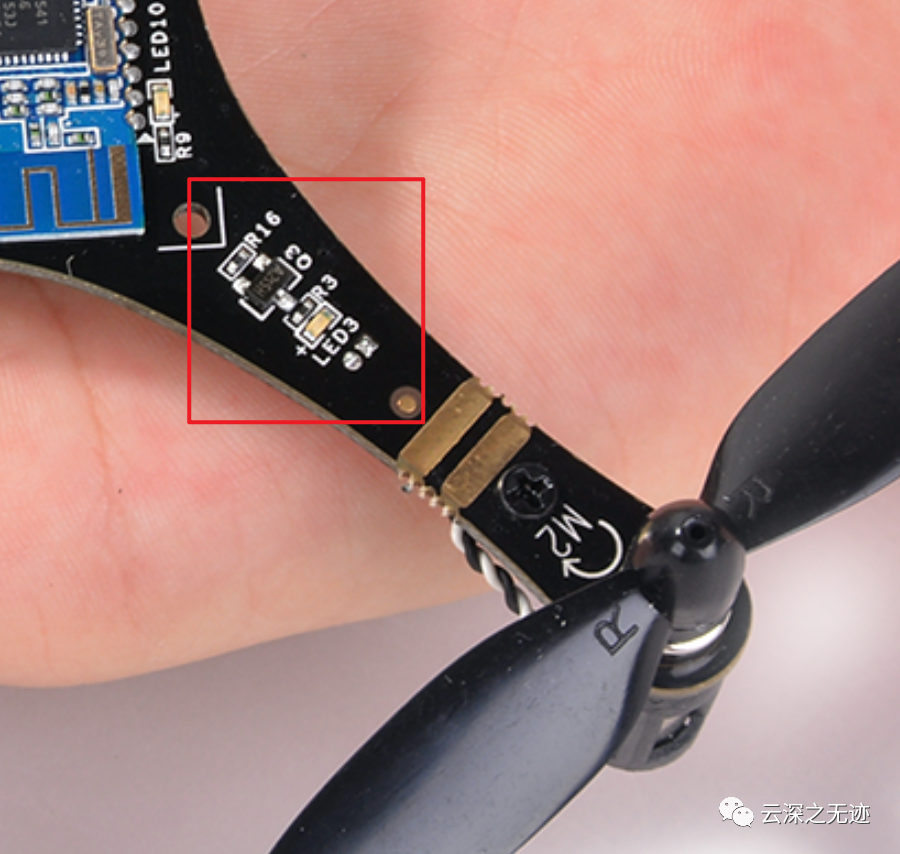
單個(gè)MOS管的原理圖,在器件布局的時(shí)候,一般機(jī)器偏大,會(huì)將管子布置的靠近電機(jī),小的時(shí)候倒是沒有啥說法,一般是布置到4角。
在這里
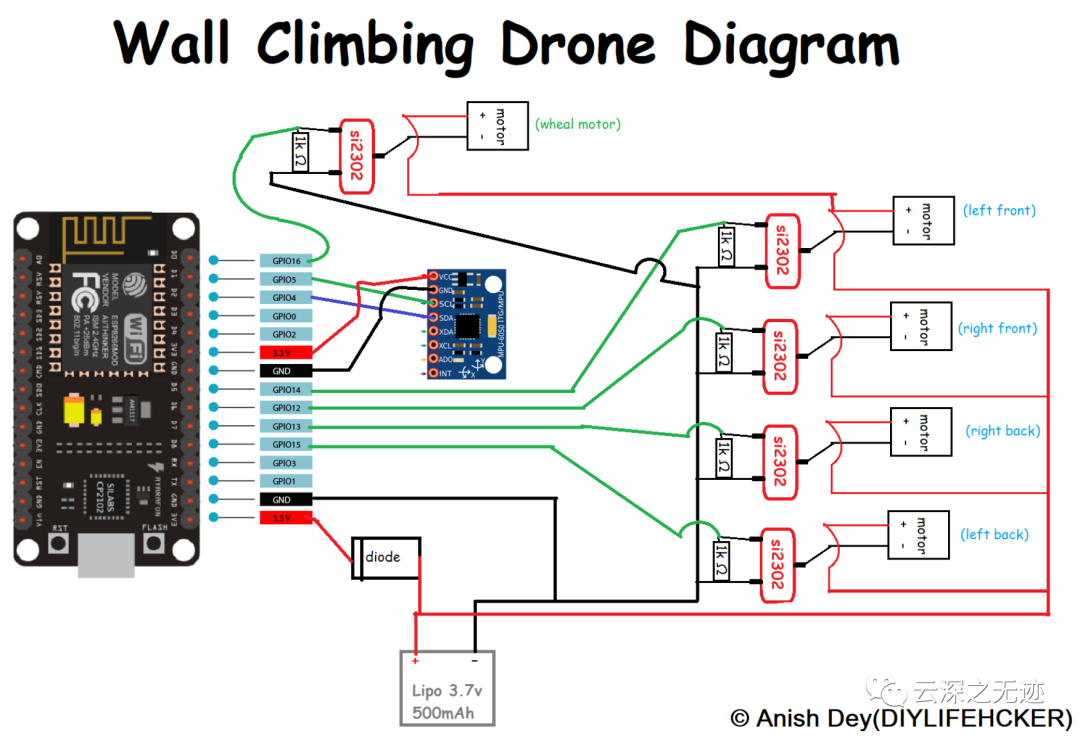
上面這個(gè)圖有毛病(一開始的圖):這個(gè)設(shè)計(jì)有大問題。電機(jī)的繞組具有電感特性,當(dāng)PWM信號讓MOS關(guān)斷時(shí),電感電流找不到續(xù)流通道,會(huì)產(chǎn)生一個(gè)超級高的感應(yīng)電動(dòng)勢,足以把MOS的源極和漏極擊穿。需要在電機(jī)上并聯(lián)續(xù)流二極管,或者用半橋拓?fù)洹R舱驗(yàn)殡姍C(jī)有這個(gè)特性,用PWM控制電機(jī)才不會(huì)導(dǎo)致電機(jī)輸出頓挫。在有續(xù)流回路的情況下,當(dāng)關(guān)斷MOS,電機(jī)上的電流會(huì)緩慢下降,而不是直接變成0。只要你讓PWM頻率足夠高,以至于在系統(tǒng)輸出最小占空比時(shí)電機(jī)電流也不會(huì)降到0,電機(jī)在整個(gè)運(yùn)轉(zhuǎn)周期中就會(huì)平穩(wěn)的產(chǎn)生扭矩。這個(gè)過程和驅(qū)動(dòng)DCDC電路的BUCK拓?fù)湟荒R粯印?/p>
這個(gè)也是推薦的一種接法
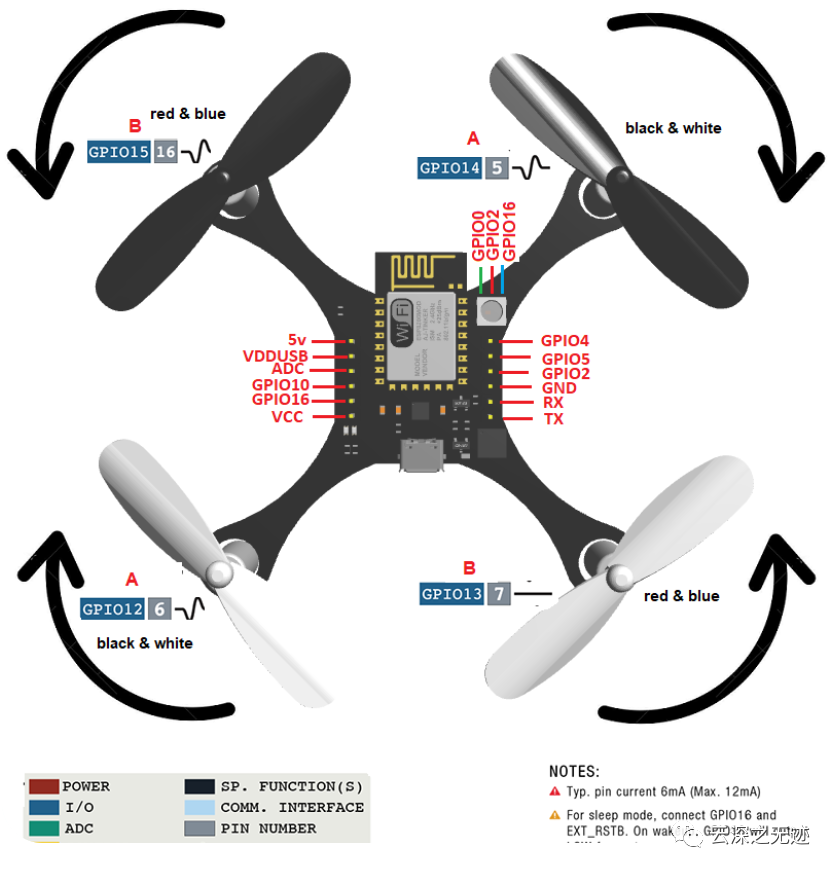
每個(gè)MOS管接一個(gè)大電阻下拉,目的是為了防止在單片機(jī)沒接手電機(jī)的控制權(quán)時(shí),電機(jī)由于PWM信號不穩(wěn)定開始猛轉(zhuǎn)。接一個(gè)下拉電阻,保證了場管輸入信號要么是高,要么是低,沒有不確定的第三種狀態(tài)。那么電機(jī)也只有兩種狀態(tài),要么轉(zhuǎn),要么不轉(zhuǎn)。主控輸出的是PWM波形,用于控制場效應(yīng)管的關(guān)閉和導(dǎo)通,從而控制電機(jī)的轉(zhuǎn)動(dòng)速度。
在最后還有張老圖,加上
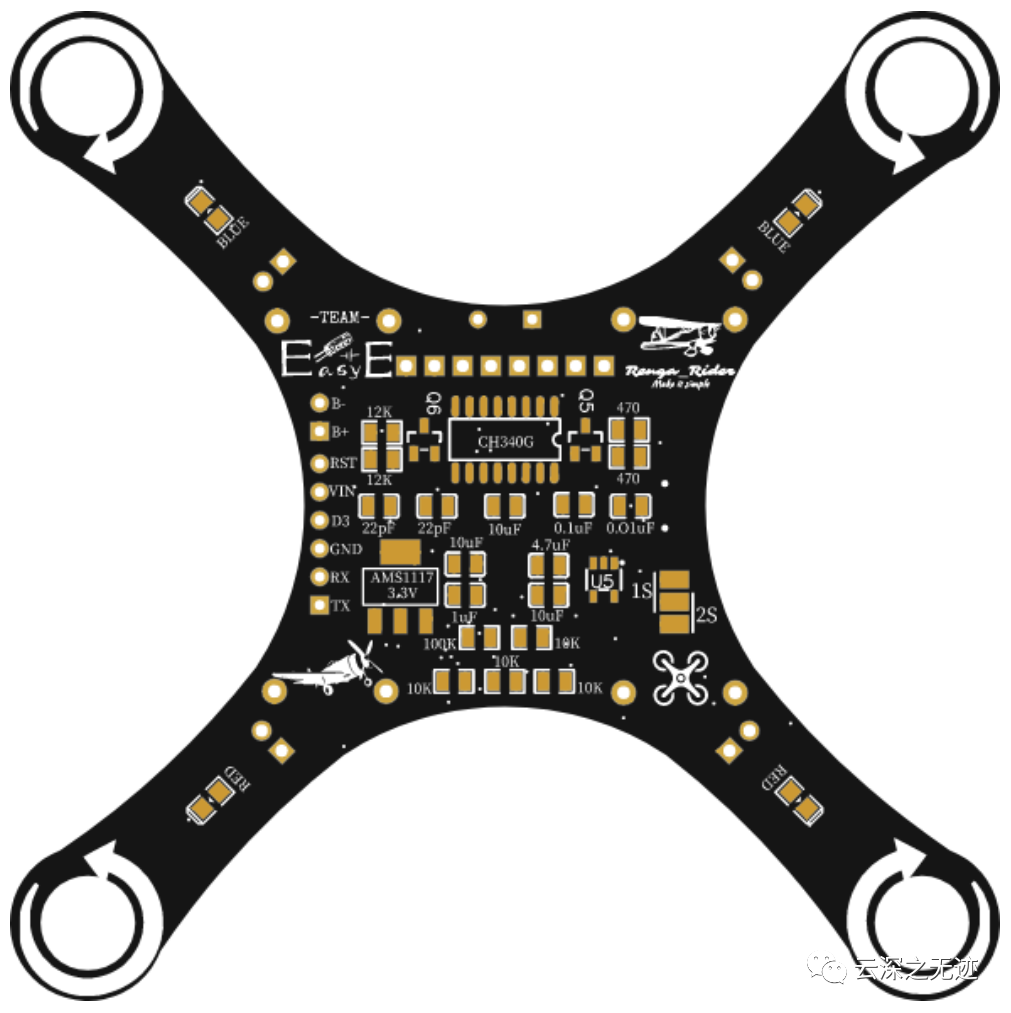
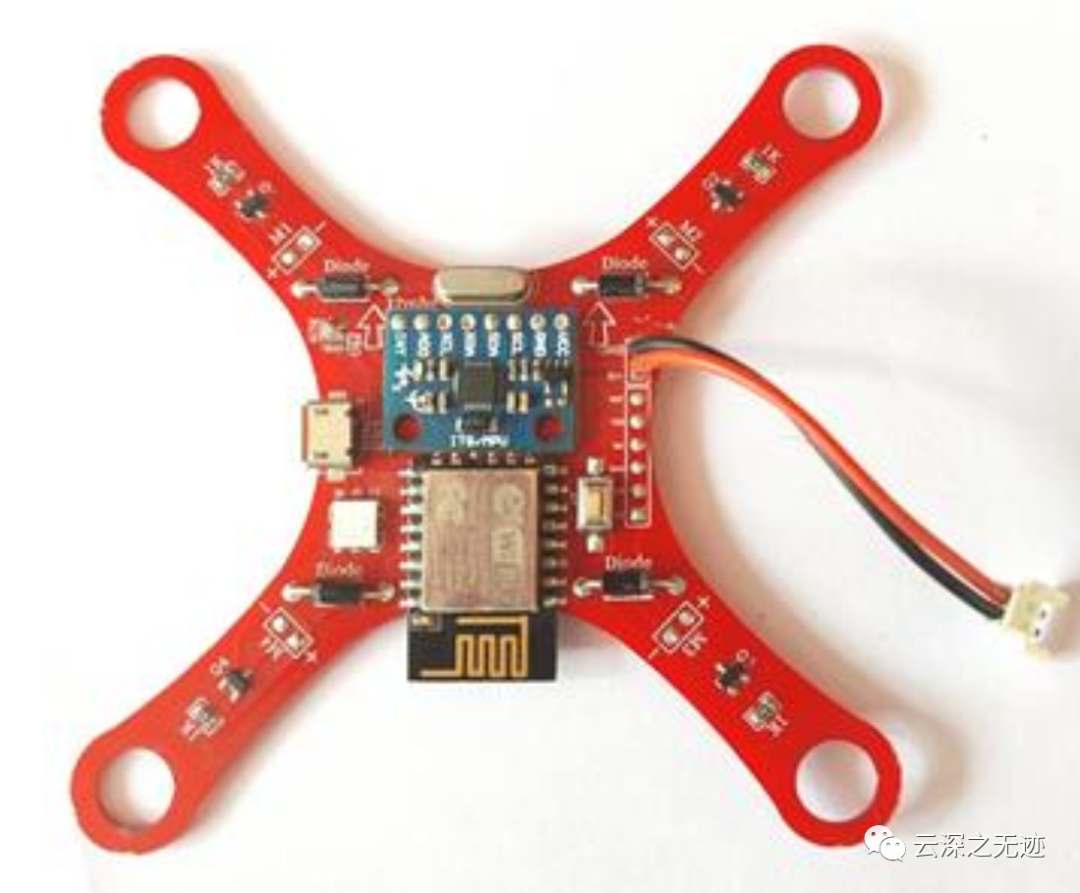
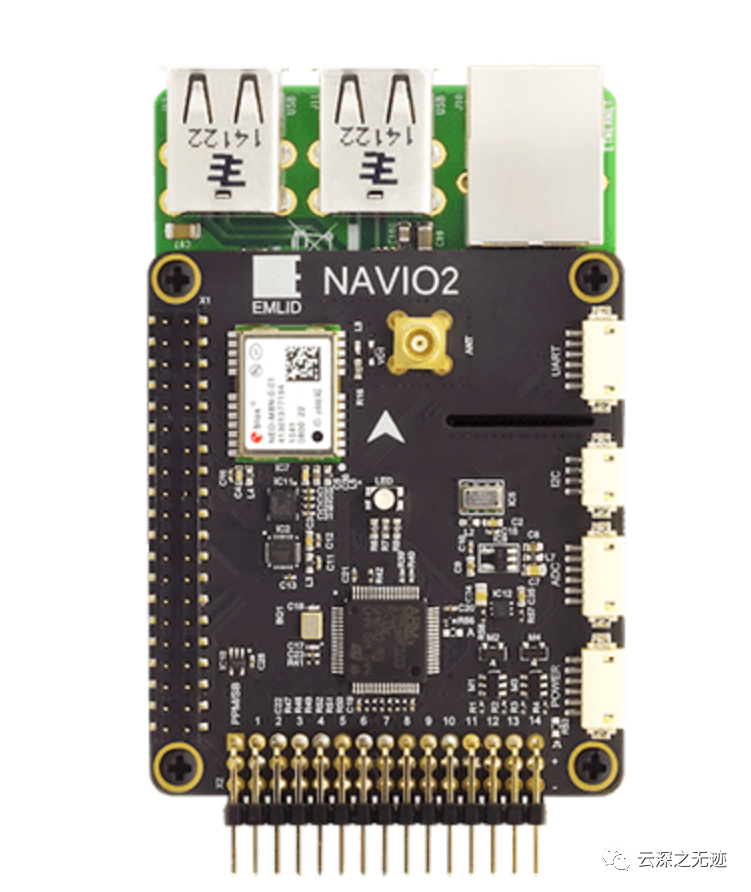
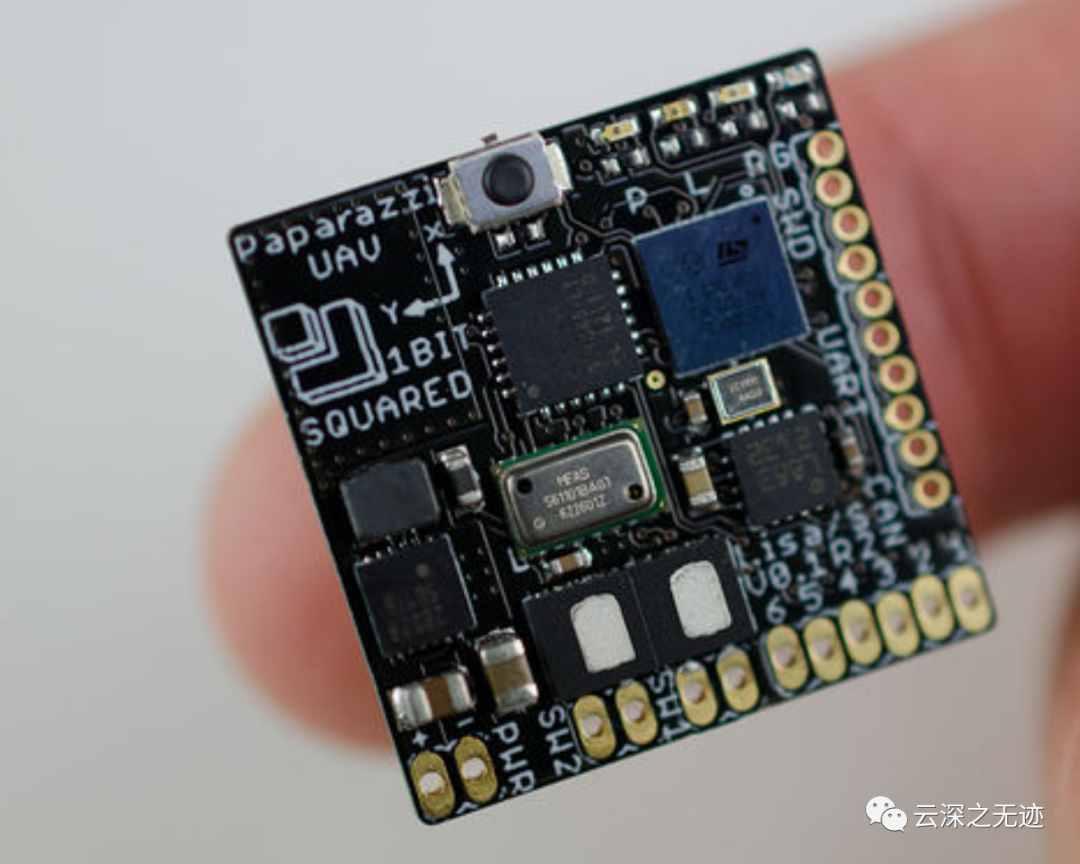
這個(gè)就是看一個(gè)PCB的設(shè)計(jì),注意板載天線為了性能整塊移動(dòng)在外部。這個(gè)圖真好看呀,不知道是拿啥繪制的。把多余的引腳的可以印出來放置成標(biāo)準(zhǔn)件,不過會(huì)加2G的質(zhì)量,我還是不建議放了。擴(kuò)展接頭 2×10 針 1.27mm (0.05”) 間距,包括電源、I2C 和 UART,這些接口引出的時(shí)候注意成對設(shè)計(jì)。可以設(shè)計(jì)成2 層PCB ,帶有用于數(shù)字和模擬電源的獨(dú)立穩(wěn)壓器!放屁用什么2層板了,lz現(xiàn)在會(huì)4層板了!(沒素質(zhì)了哈)
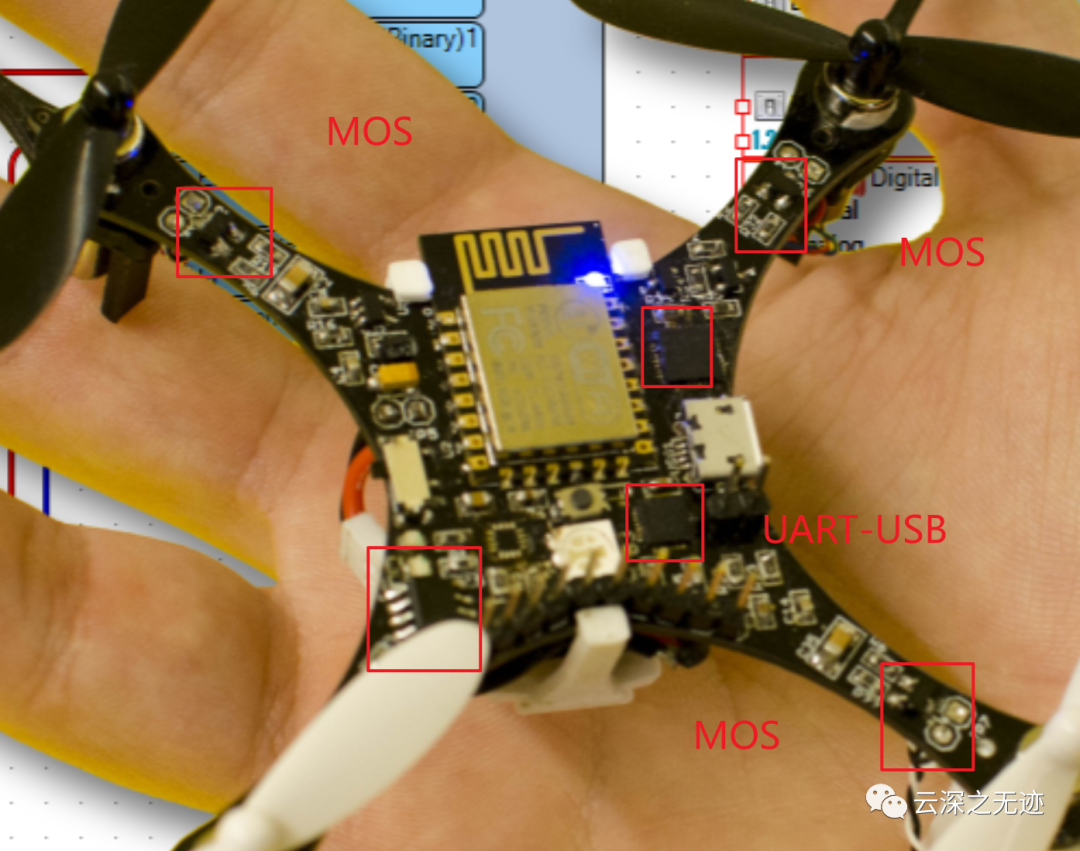
UART轉(zhuǎn)USB的芯片一般都是CP2102,記得離得近些

不錯(cuò)
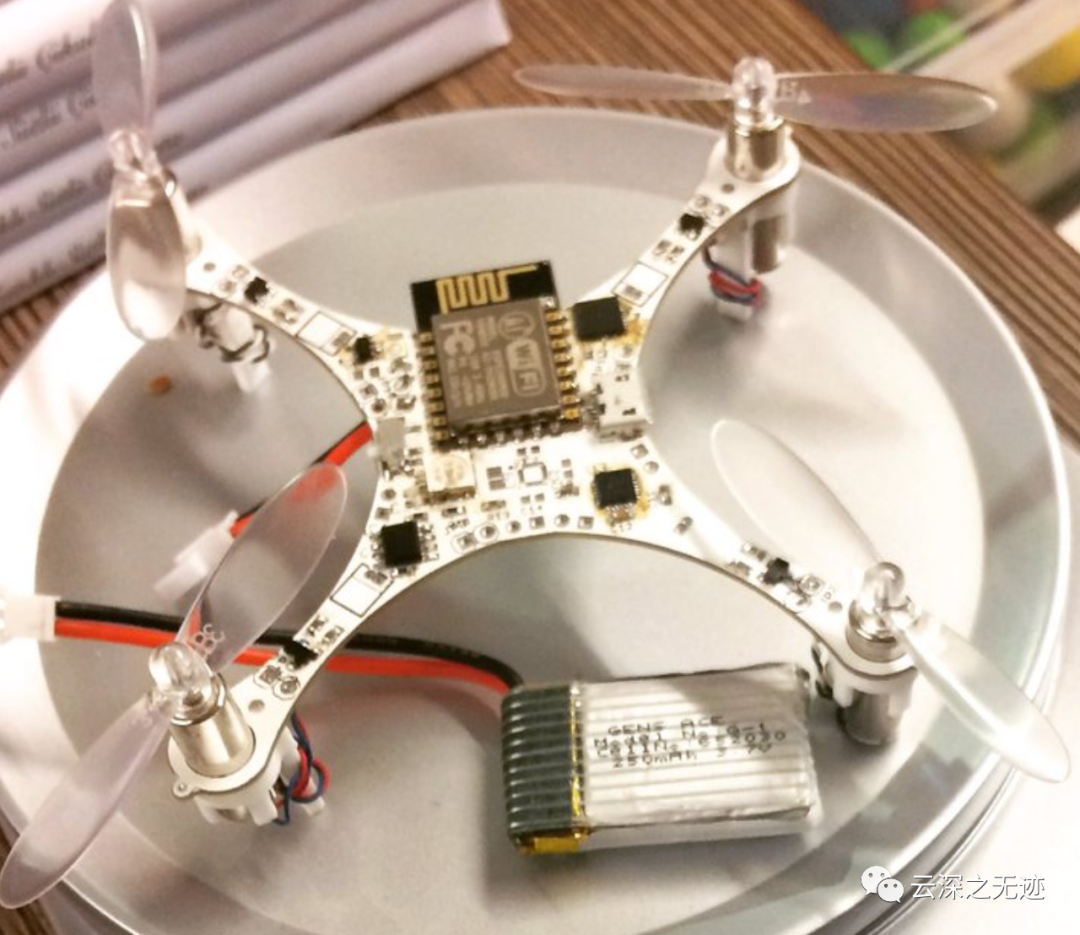
甚至可以做成這樣的無敵簡陋的版本
在我看來。模塊化設(shè)計(jì)是必要的,所以也可以考慮驅(qū)動(dòng)和主控這塊變成接插件
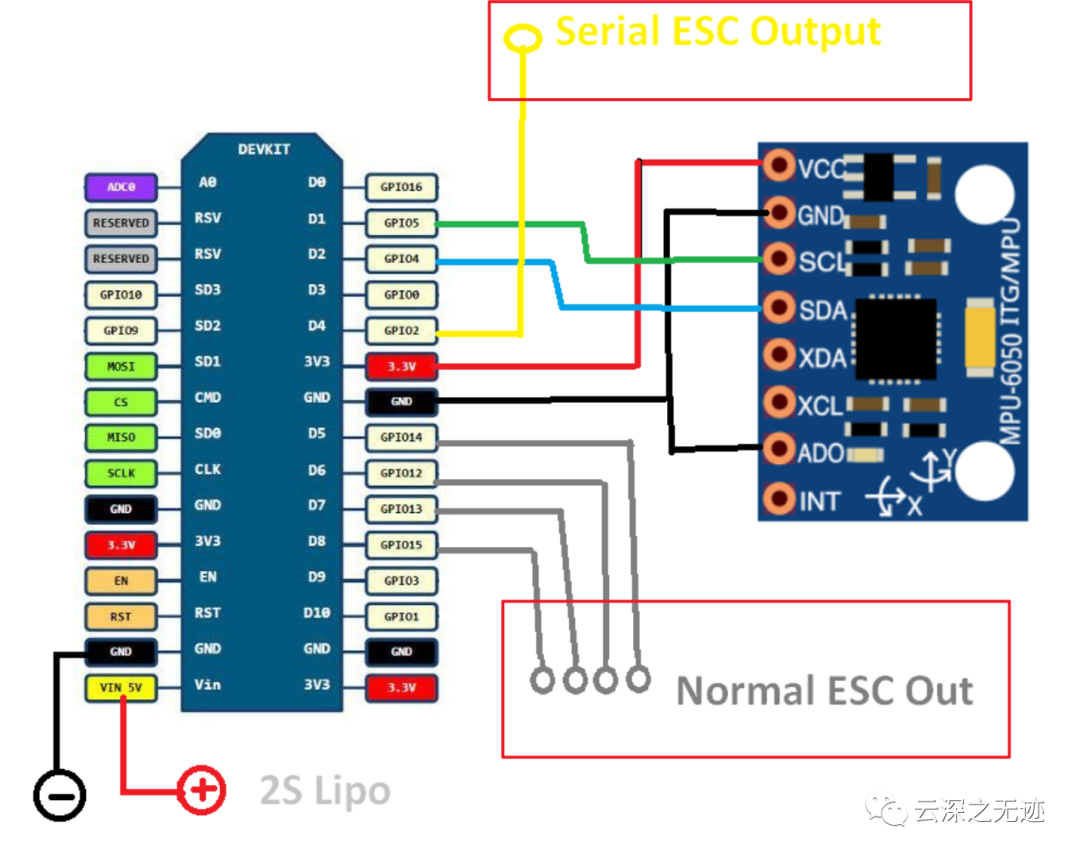
還有一種做法是直接就留PWM接ESC就行,這里就可以移植數(shù)字的ESC協(xié)議了,有刷變無刷,單車變摩托了。
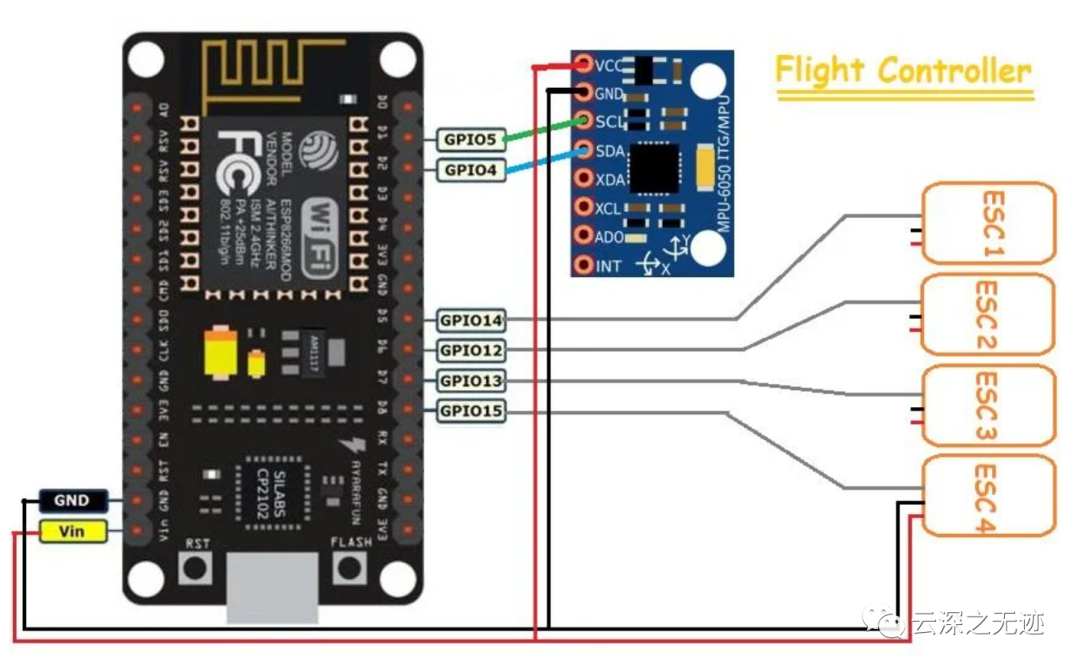
這個(gè)是找到的一個(gè)中古接線圖
這個(gè)和上面的方案一樣
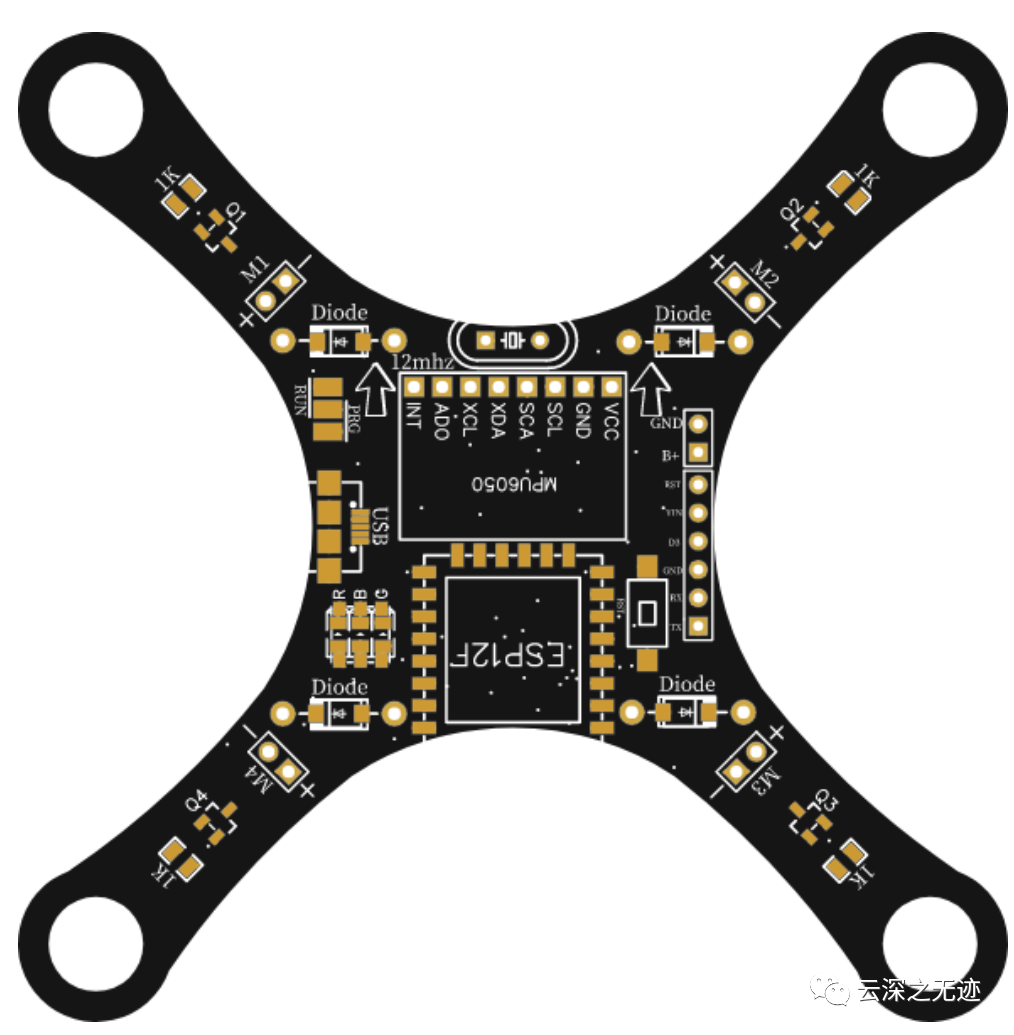
這個(gè)也是雙層板的設(shè)計(jì),可以看到布局吧,但是這個(gè)MPU的小板子就很占地方了。

別笑,反正可以飛起來的

這個(gè)是STM芯片的設(shè)計(jì)
?3 英寸四軸飛行器:450 – 850mAh ? 4 英寸四軸飛行器:850 – 1300mAh ? 5 英寸四軸飛行器:1300 – 1800mAh ? 6 英寸四軸飛行器:1500 – 2200mAh ? 7 英寸四軸飛行器:1800 – 3200mAh 上面是不同尺寸的無人機(jī)搭載的電池容量選型。
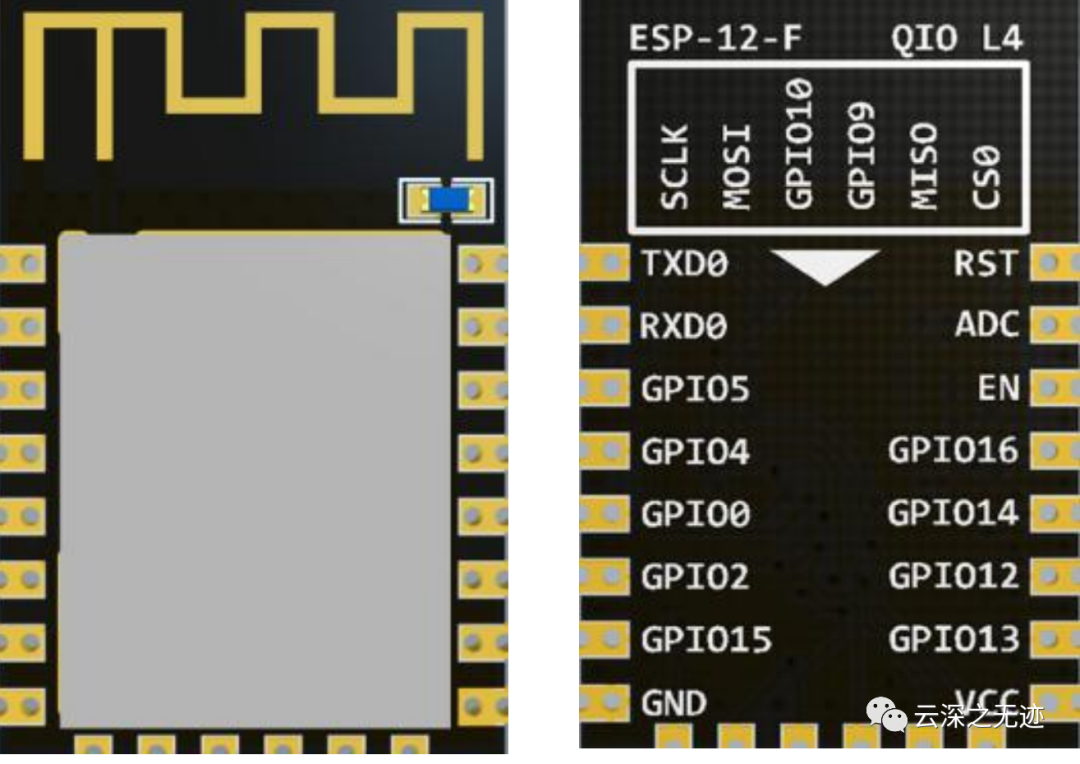
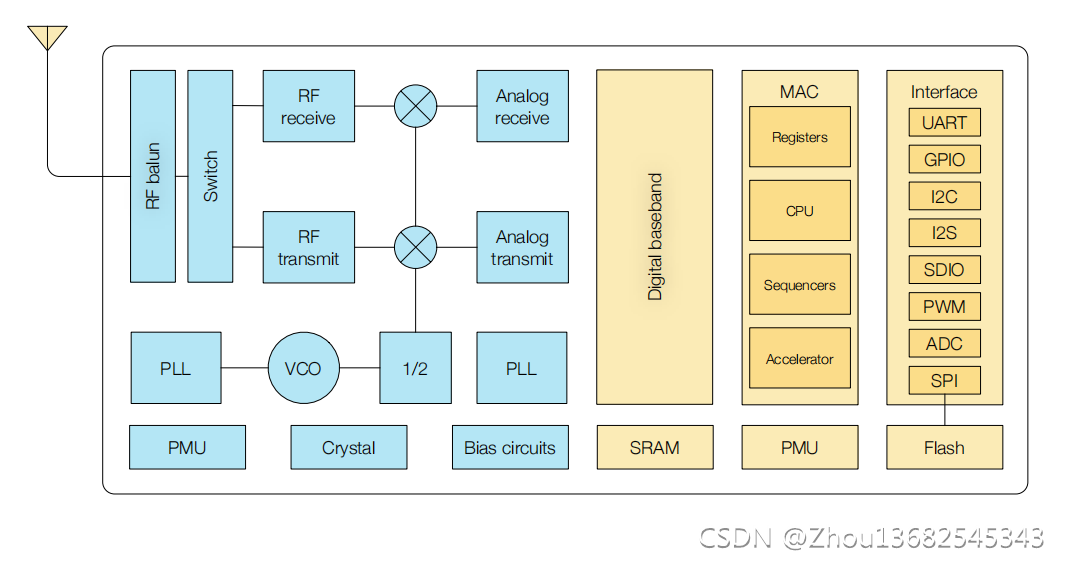
使用的ESP8266-12F
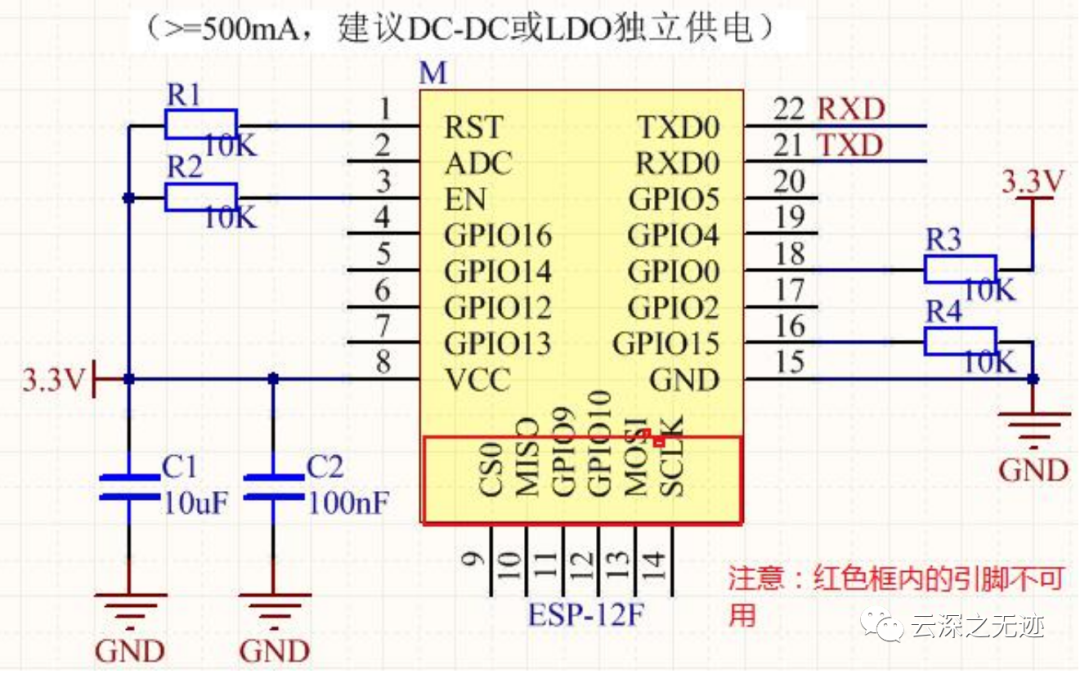
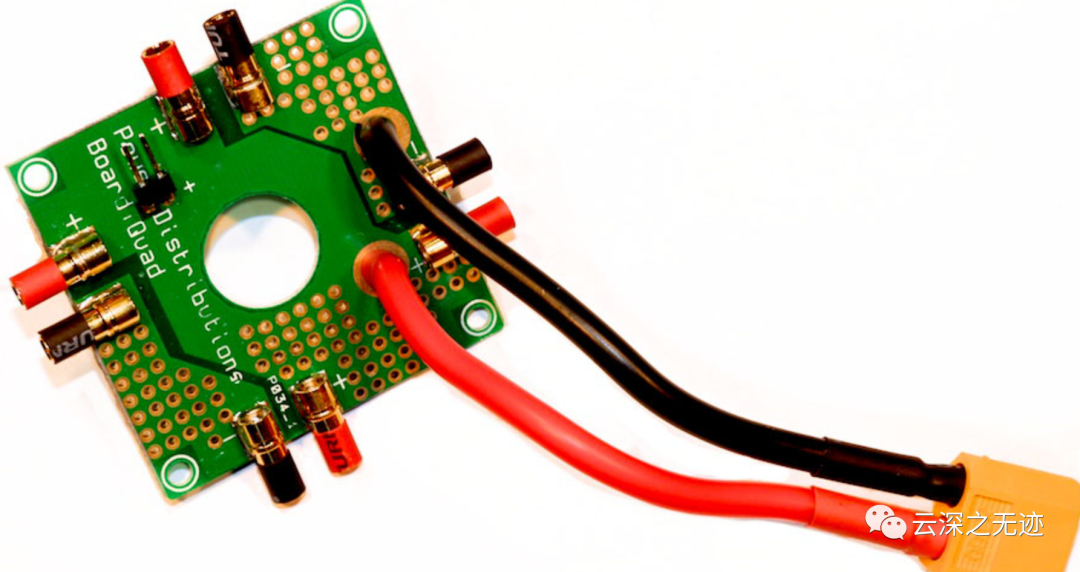
供電設(shè)計(jì)
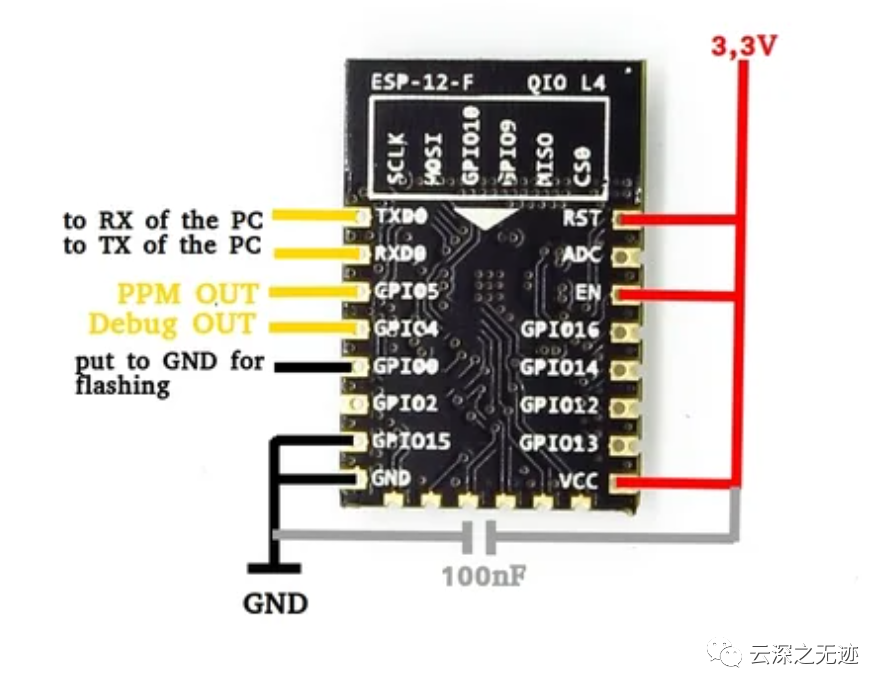
WifiPPM
找到一個(gè)有趣的項(xiàng)目:智能手機(jī)控制微型室內(nèi)四軸飛行器。該程序使用 HTML 5 網(wǎng)站啟動(dòng) wifi 接入點(diǎn)以控制 PPM 信號。PPM 信號由中斷產(chǎn)生。
由于 HTML5,可以使用任何智能手機(jī)控制您的 RC 設(shè)備,而無需任何應(yīng)用程序。也可以使用 PC 連接到網(wǎng)站并使用操縱桿進(jìn)行控制。目前這僅適用于 Firefox。
代碼在Github了
https://github.com/yunswj/wifi-ppm

可以讓你的小飛機(jī)變成手機(jī)控制
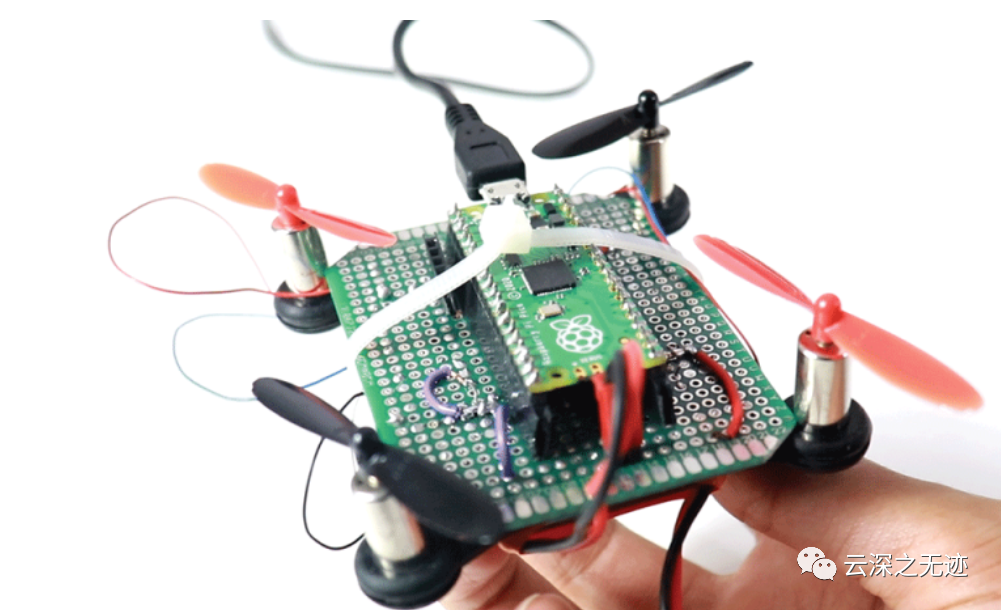
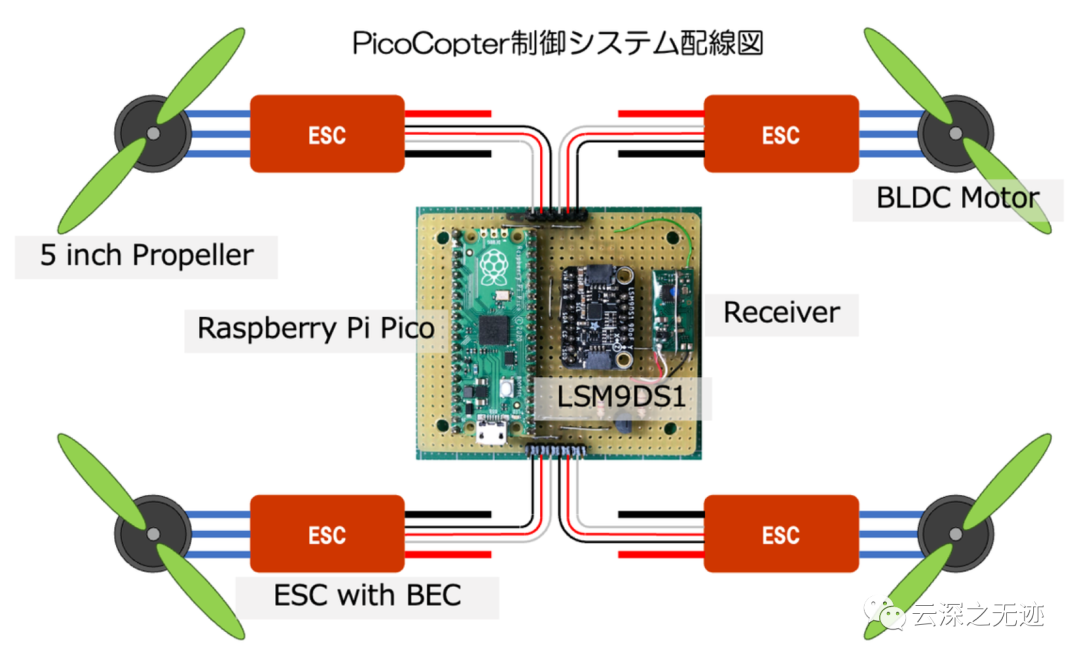
還有Pico做無人機(jī)也是可以的
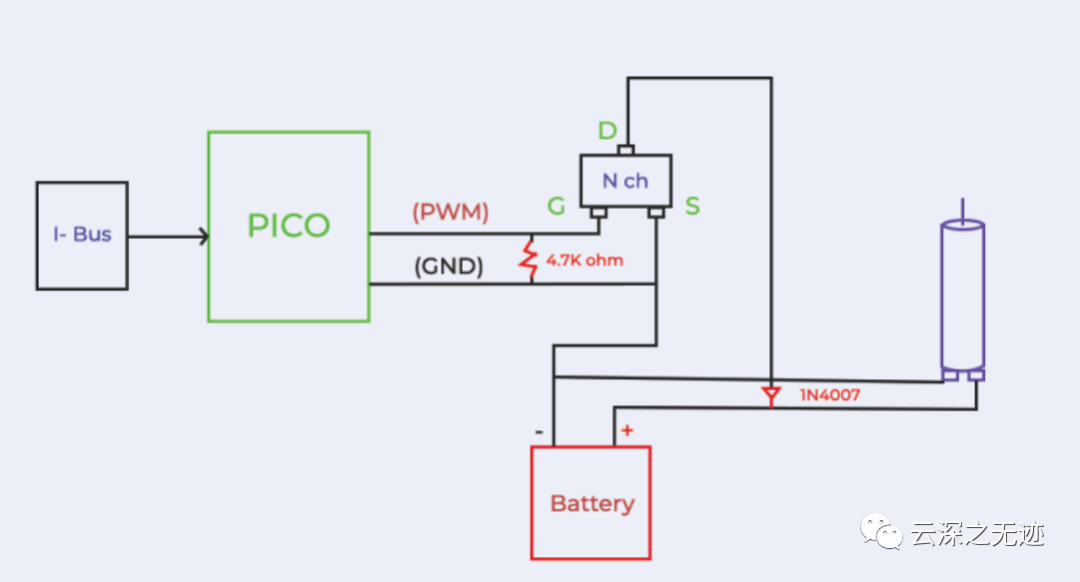
驅(qū)動(dòng)部分
該部分由 n 溝道 MOSFET 組成,它將在其柵極端子上接收來自樹莓派 pico 的 PWM 信號。在這些信號的幫助下,MOSFET 將用作開關(guān)來打開和關(guān)閉電機(jī)。
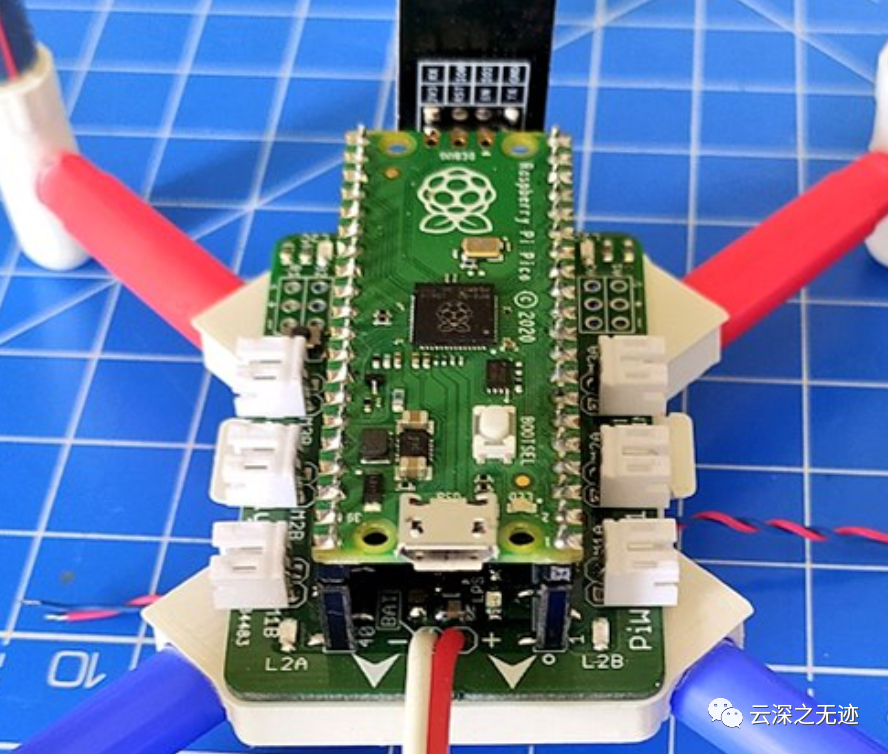
設(shè)計(jì)的接插件的板子,我也去畫一個(gè)
這個(gè)是用在樹莓派的,我在給地平線的板子繪制
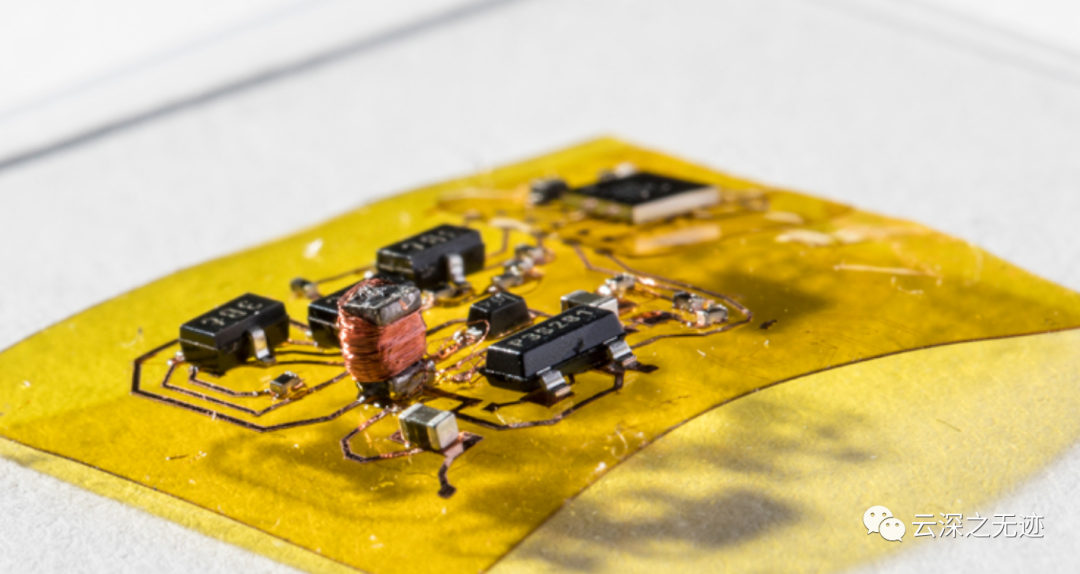
這個(gè)是光動(dòng)力的接收機(jī)
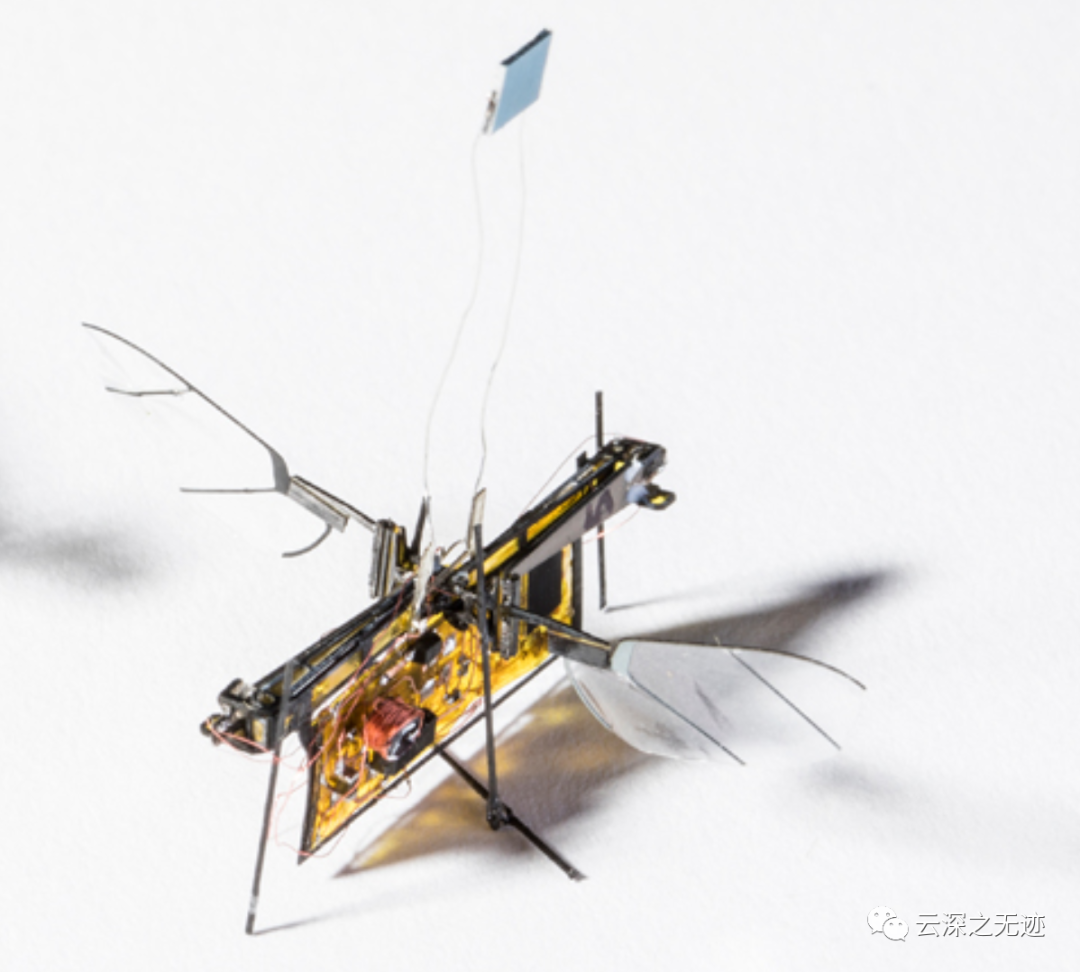
上面是硅光電池

這個(gè)是Pico直接簡版飛行
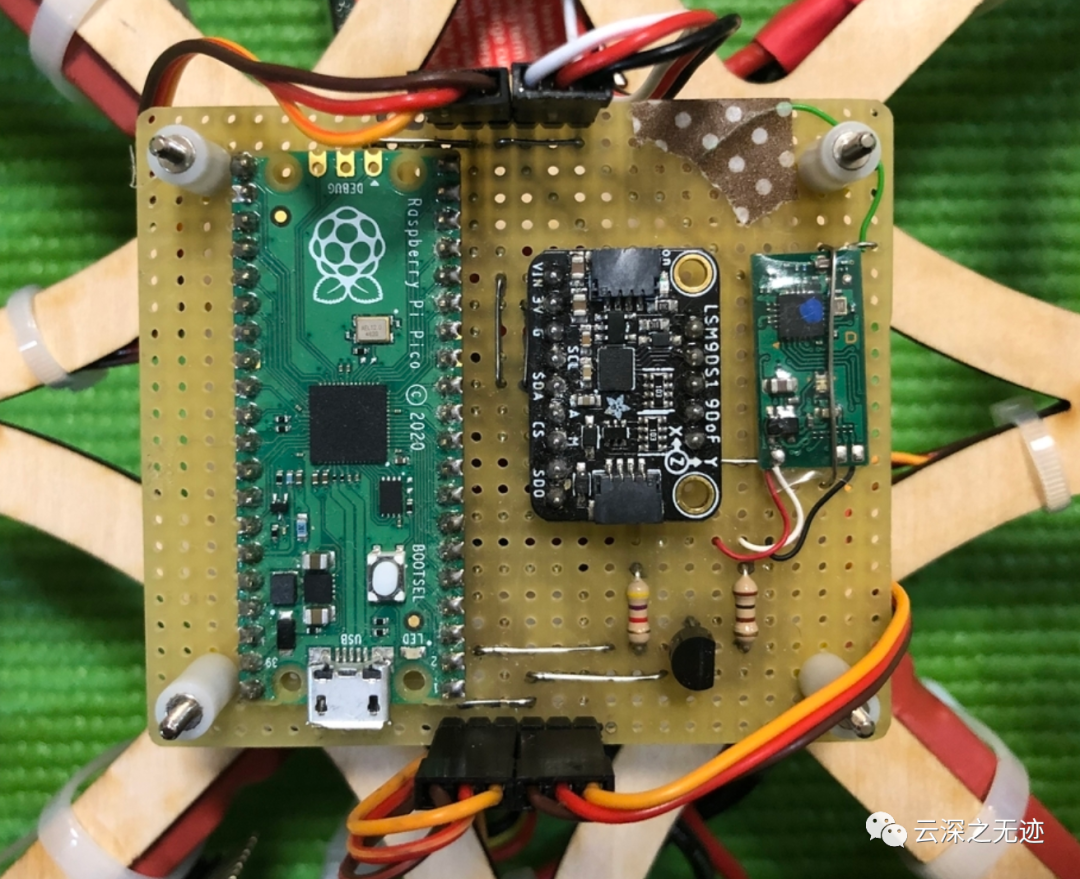
IMU用的是ST家的,我也去買兩個(gè)
供電
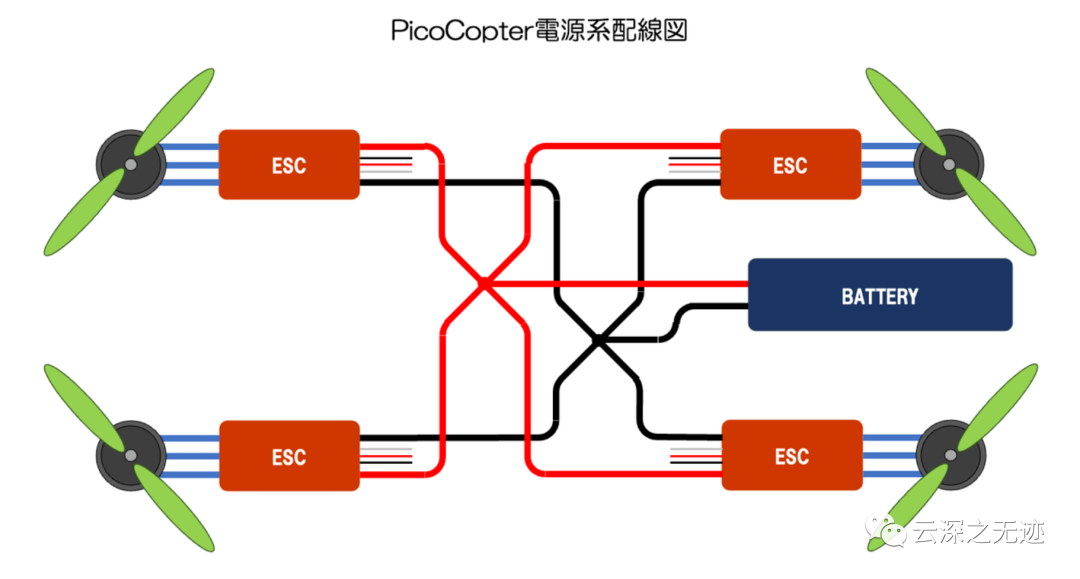
供電
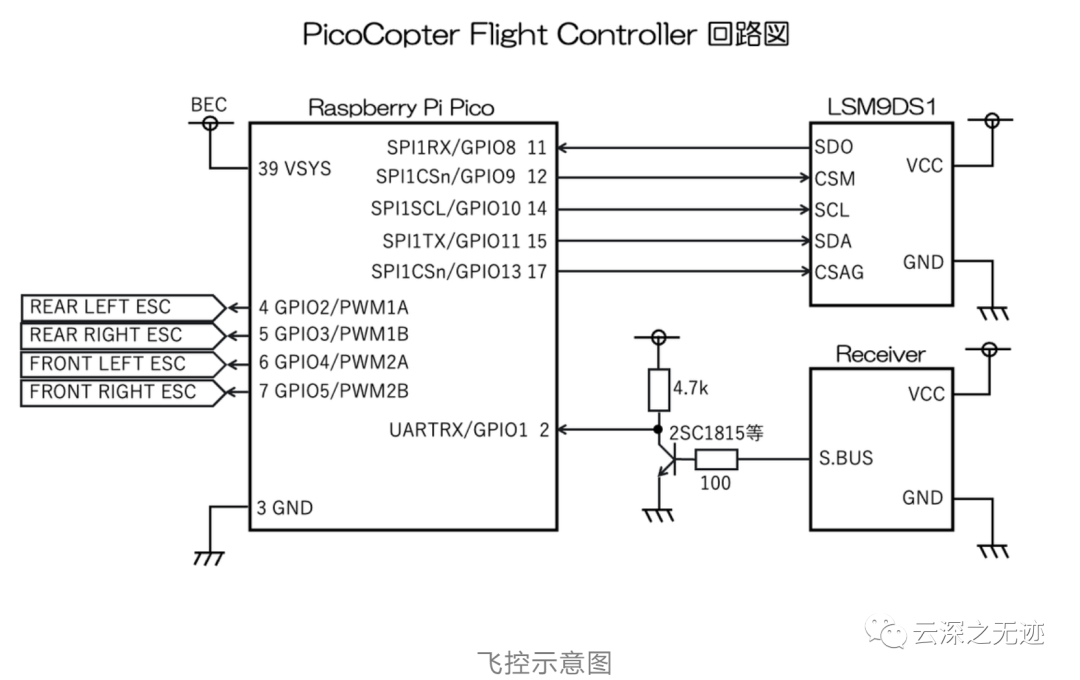
飛控電路圖
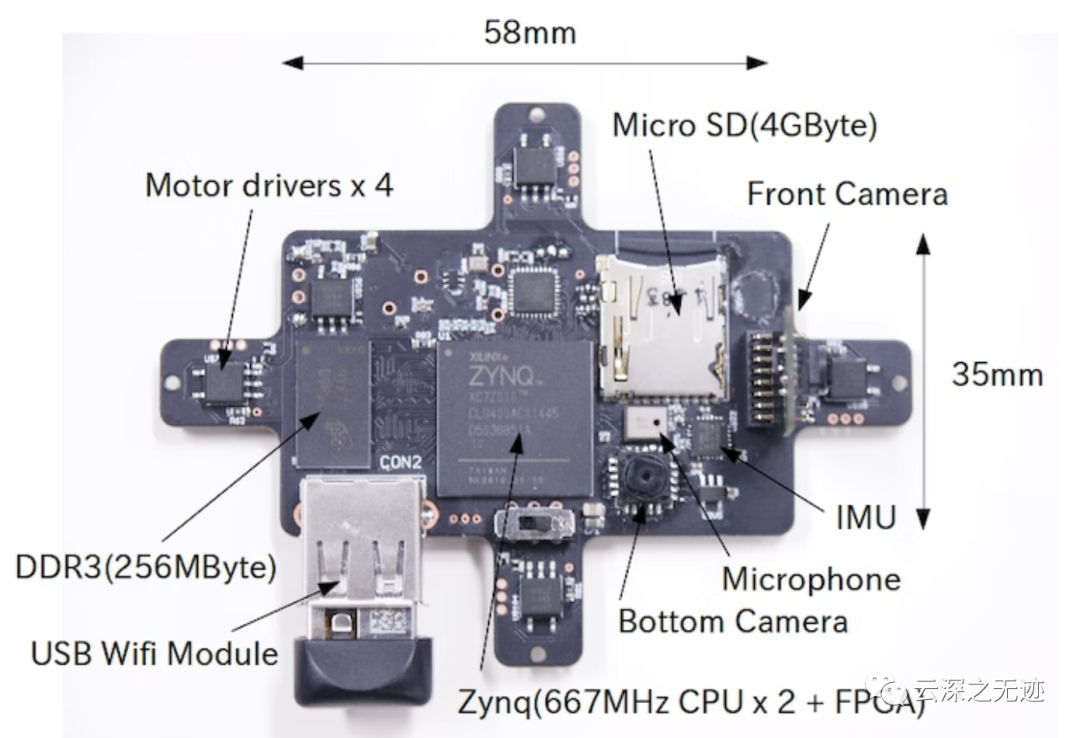
這個(gè)是我找的一個(gè)FPGA做飛控的板子
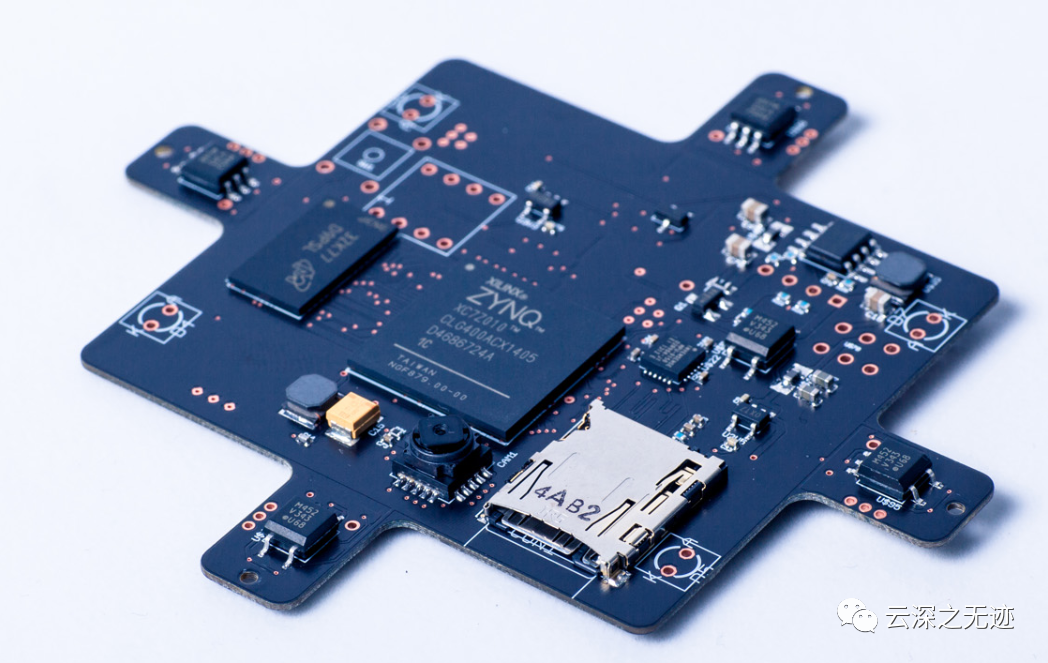
很漂亮啊

不過它眾籌的失敗了。。。可能大家不理解是啥產(chǎn)品吧
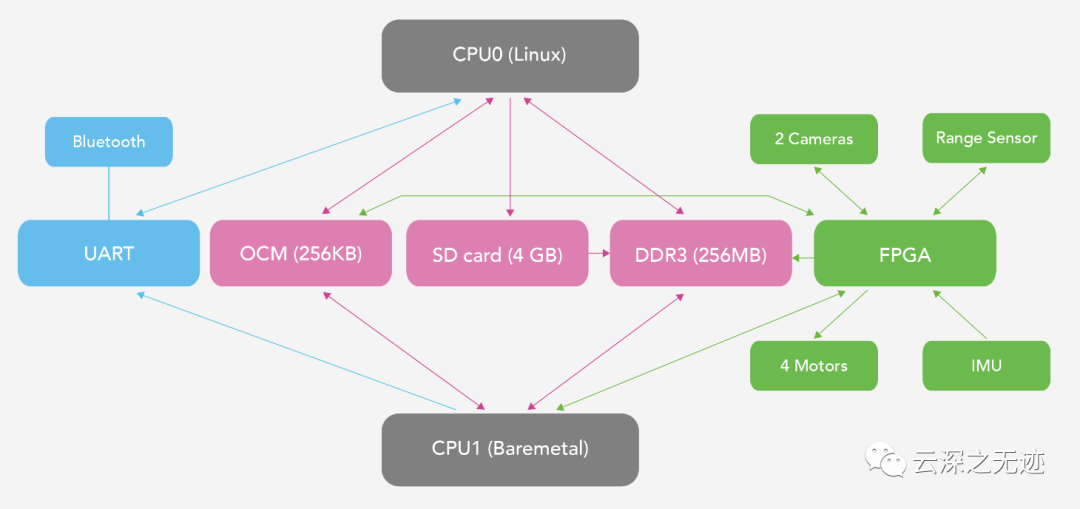
信息流圖
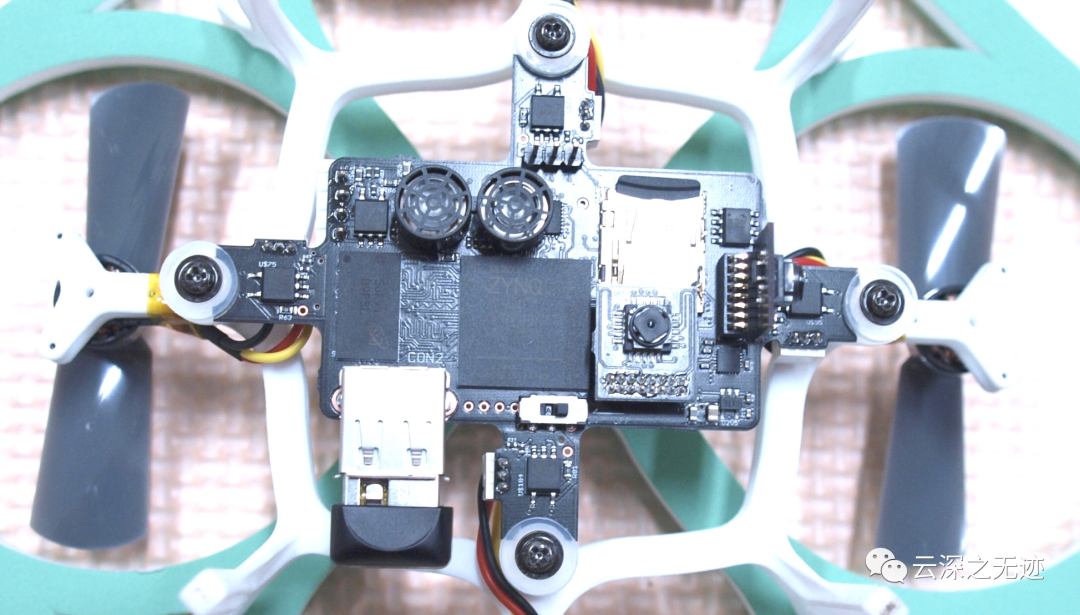
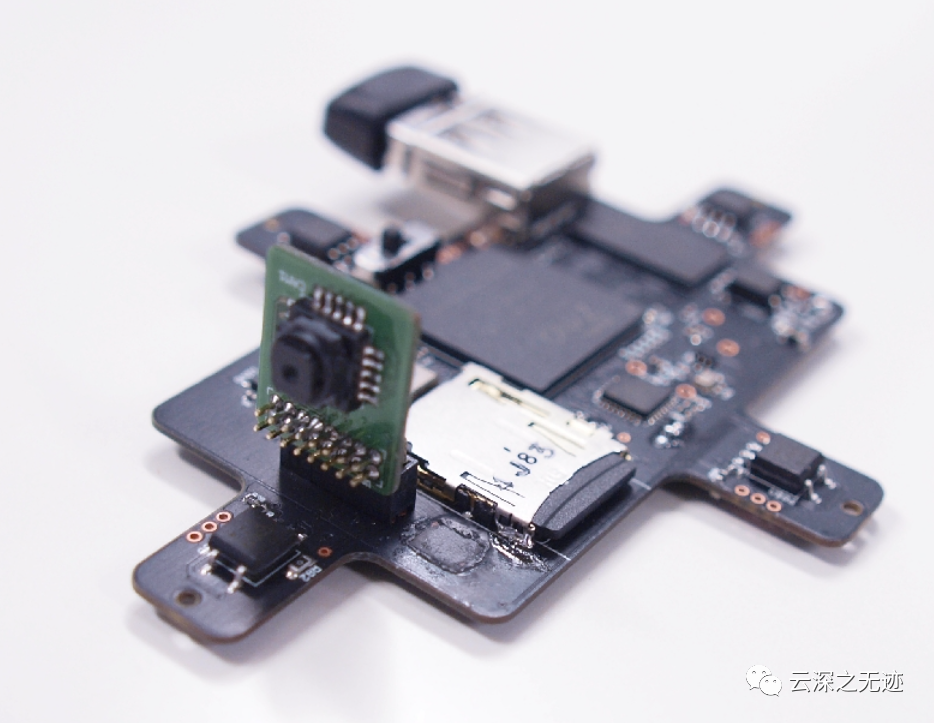
一些細(xì)節(jié)
太漂亮了

很漂亮
對了,板子的話,如果為了小,還是不要搞大器件設(shè)計(jì)了,只有單器件才可以很小。
審核編輯 :李倩
-
原理圖
+關(guān)注
關(guān)注
1298文章
6346瀏覽量
234274 -
pcb
+關(guān)注
關(guān)注
4319文章
23111瀏覽量
398231 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10454瀏覽量
180717
原文標(biāo)題:ESP8266無人機(jī)原理圖+PCB合集
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
esp32和esp8266代碼共用嗎
esp8266和esp32區(qū)別是什么
esp8266不燒錄可以使用嗎
esp8266wifi模塊怎么連接手機(jī)
開源項(xiàng)目!用ESP8266 DIY會(huì)爬墻的無人機(jī)
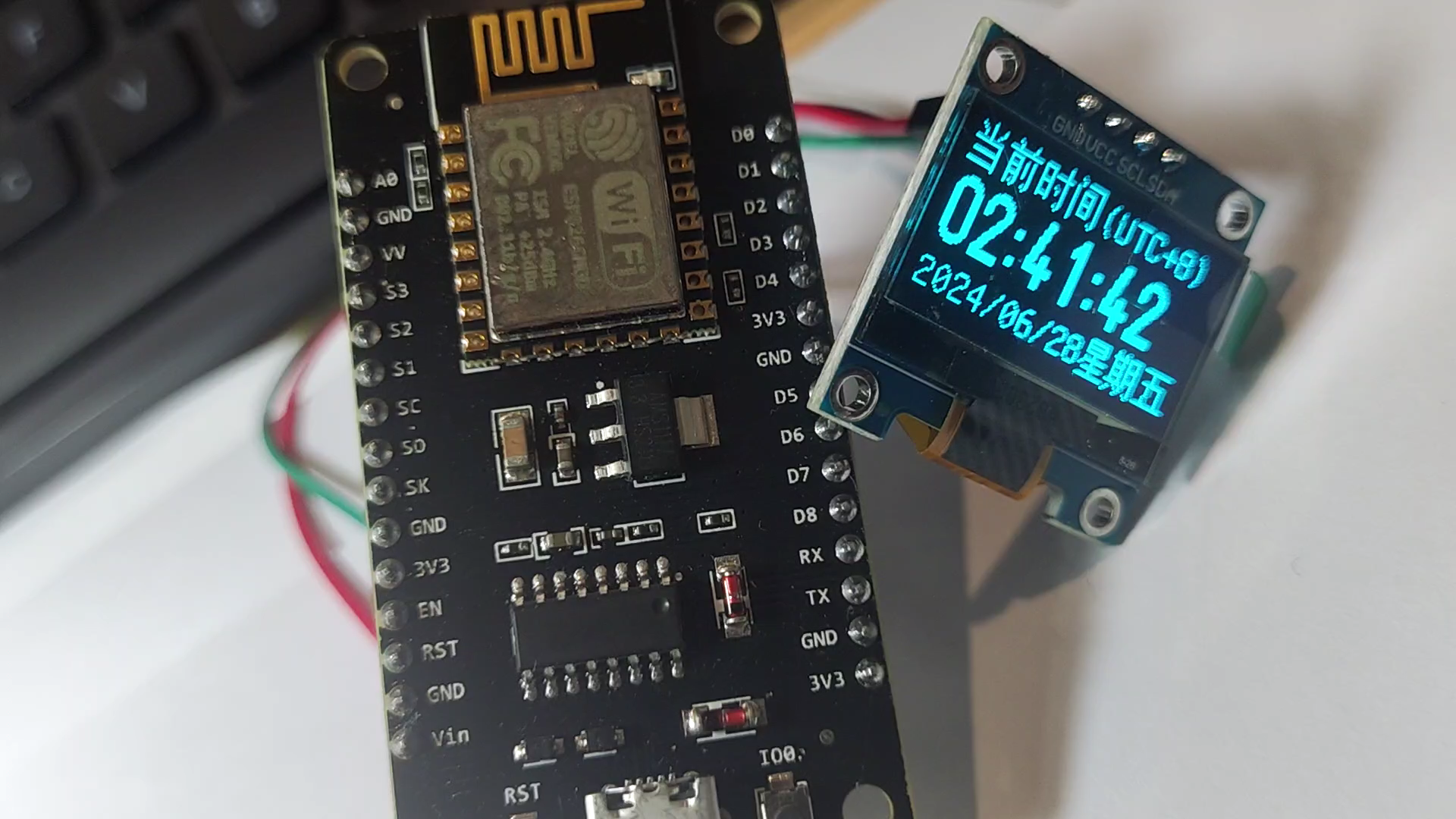
ESP8266網(wǎng)絡(luò)天氣時(shí)鐘OLED顯示
國產(chǎn)低成本W(wǎng)i-Fi SoC解決方案芯片ESP8266與ESP8285對比差異
第四集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的組成與工作原理
第三集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的應(yīng)用領(lǐng)域
第二集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的發(fā)展歷程
第一集 知語科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的定義與分類
無人機(jī)全景監(jiān)測:空域管理的新革命
什么是無人機(jī)圖傳系統(tǒng)?無人機(jī)圖傳系統(tǒng)的構(gòu)成





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論