 使用MEMS加速度計和自適應參考捕獲車載DVR系統中的真實加速度數據
使用MEMS加速度計和自適應參考捕獲車載DVR系統中的真實加速度數據
現代車載數字視頻記錄系統 (DVR) 或 OBD 正在使用加速度計(g 傳感器)來測量車載加速度。這允許DVR在發生預定義事件(例如急剎車或碰撞)時,使用日期/時間/加速信息為錄制的視頻加水印。將視頻保存到系統內存(如硬盤或SD卡)時,水印很有幫助。水印可以輕松識別和播放感興趣的活動視頻。并且通過僅保留帶水印的視頻并刪除其他視頻,可以顯著節省系統內存。然而,由于加速度計上的地球重力偏移和車輛振動的組合,在車輛運行時準確測量加速度是一項很大的挑戰。本文介紹了解決此問題的簡單但有效的方法。
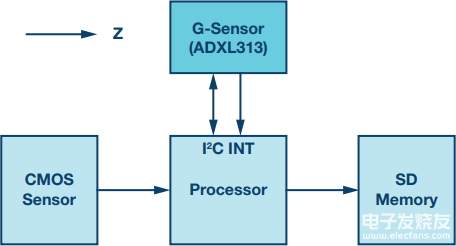
圖1所示為車載DVR系統框圖。來自CMOS傳感器的相機視頻被拍攝、處理并最終存儲在獨立存儲器中,例如SD卡或硬盤。如藍色突出顯示所示,加速度計(例如ADXL313)用于測量車輛加速度。
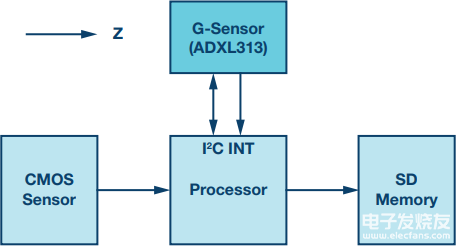
圖1.車載DVR系統框圖。
圖 2 說明了帶有加速度計的 DVR 系統的工作原理。在預定義事件的情況下,例如急剎車,加速度會隨著車輛速度的變化而顯著增加或減少。加速度計將感測并測量數據MCU/處理器可以捕獲和處理的加速度。一旦加速度超過預定義的閾值(例如,–1.5 g),DVR 系統將開始為錄制的視頻添加日期/時間/加速值等信息的水印。
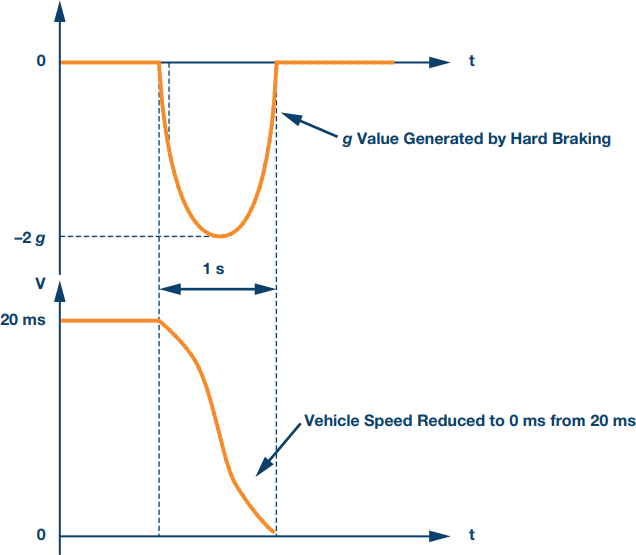
圖2.車輛急剎車時的加速度和速度與時間的關系。
實際上,加速度計測得的加速度并不能準確反映由于地球重力偏移和車輛振動引起的畸變而導致的真實車輛加速度。在許多情況下,會引入地球的重力偏移。例如,當DVR安裝在后視鏡中時,鏡子與地球引力的表面角度是不確定的,因為乘客可以用手調節它。另一個例子是當車輛在非 100% 水平的道路上行駛時。此外,來自車輛發動機的振動和崎嶇的路況會隨機耦合到加速度測量中并導致誤差。
表1檢查了地球重力偏移如何引入重大誤差。第一列是與地平線相關的道路坡度角度;第二列是由地球引力引入的重力傳感器Z軸上的偏移量;第四列是傳感器在Z軸上測量的加速度。如第四列所示,在車輛上加速度為 1 g 時,z 軸上測得的加速度隨角度增加。例如,在 15° 角處,測得的加速度約為 1.26 g,z 軸上的實際加速度為 1 g,因此測量誤差約為 26%。
|
道路坡度與感應重力偏移 |
|||
| 路面坡度T(°) | Z 軸上的重力偏移 (g) | Z軸上的真實車輛g(g) | 傳感器在 Z 軸上測量的 g (g) |
| 0 | 0 | 1 | 1 |
| 1 | 0.017452406 | 1 | 1.017452406 |
| 2 | 0.034899497 | 1 | 1.034899497 |
| 3 | 0.052335956 | 1 | 1.052335956 |
| 4 | 0.069756474 | 1 | 1.069756474 |
| 5 | 0.087155743 | 1 | 1.087155743 |
| 6 | 0.104528463 | 1 | 1.104528463 |
| 7 | 0.121869343 | 1 | 1.121869343 |
| 8 | 0.139173101 | 1 | 1.139173101 |
| 9 | 0.156434465 | 1 | 1.156434465 |
| 10 | 0.173648178 | 1 | 1.173648178 |
| 11 | 0.190808995 | 1 | 1.190808995 |
| 12 | 0.207911691 | 1 | 1.207911691 |
| 13 | 0.224951054 | 1 | 1.224951054 |
| 14 | 0.241921896 | 1 | 1.241921896 |
| 15 | 0.258819045 | 1 | 1.258819045 |
圖3顯示了用地球重力偏移和車輛振動耦合到加速度計上測量的真實加速度事件。在圖中,藍線表示在加速度計上測量的加速度,黃線表示地球重力引入的重力偏移。如圖所示,觀察到三個峰值點,A點,B點和C點.A點測量約1.25 g,B點測量約2.25 g,C點測量約1.75 g。通過將閾值預定義為 1.5 g,B 點和 C 點都超過了閾值,而 A 點低于閾值。但是,事實上,這個結果是錯誤的,因為加速度計上的重力偏移沒有得到補償。如圖中突出顯示的紅色所示,通過消除重力偏移效應,A點的實際加速度約為1.5 g,B點約為2 g,C點約為1.25 g。在這種情況下,預定義閾值為 1.5 g,A 點和 B 點超過閾值,C 點低于閾值。這個例子清楚地表明,重力偏移會在測量的加速度上引入誤差,從而導致系統做出不正確的決策。實際上,重力偏移和振動都是不可預測的,因此測量中引入的誤差也是不可預測的。從重力偏移和振動的測量數據中提取實際加速度是一項相當大的挑戰。
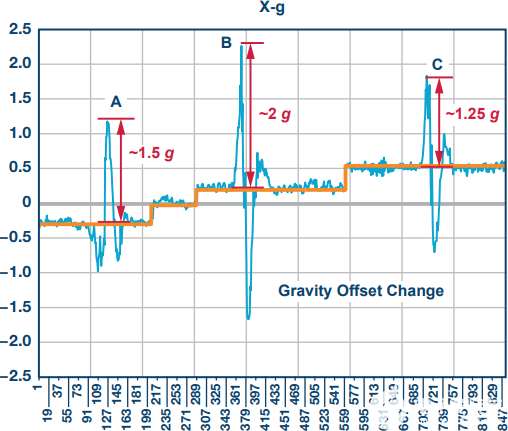
圖3.加速度輸出與地球重力偏移和車輛振動相結合。
然而,自適應參考可以自適應地消除重力偏移和振動引入的誤差。它立即監控來自加速度計的數據,任何隨時間變化小而緩慢的數據都被認為是重力偏移和振動引入的誤差。圖 3 中的黃線突出顯示了這一點。感興趣的實際加速度隨時間變化大而快,可以通過消除重力偏移和振動引入的誤差來識別和提取測量數據。這在圖3中突出顯示為脈沖A、B和C。下一段描述了實現真實加速度數據的基本操作。
在每個測量周期中,加速度計測量并存儲數據,這些數據用作下一個周期計算的參考。在下一個測量周期,測量數據將與前一個周期的參考數據進行比較,并將結果數據與預定義的閾值進行比較。如果結果數據超過預定義的閾值,則將其識別為感興趣的大而快速的傳輸,并將由系統軟件進一步處理。如果結果數據未超過閾值,則將其標識為重力和振動引入的偏移和噪聲。測量周期需要微調算法來實現基于不同環境的準確檢測。上述過程可以用以下公式表示:

其中
gn = 當前測量周期中測量的 g 數據 gn – 1 = 在前一個周期
中測量的 g 參考 gth = 預定義的 g 閾值
圖4描述了通過消除重力偏移和振動引入的誤差來計算的實際加速度。如圖所示,現在黃線接近于零,這意味著重力偏移和振動幾乎被消除。點 A、B 和 C 正確反映了實際加速度。
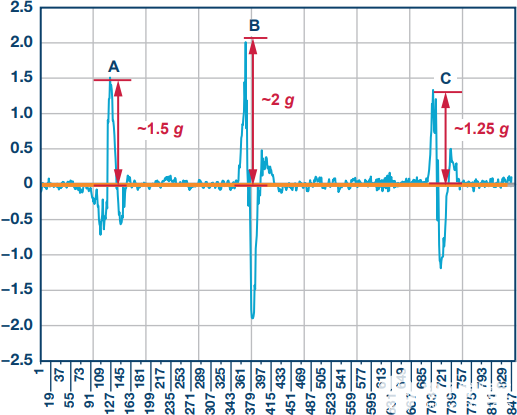
圖4.應用自適應參考方法后的精確加速度。
一般來說,上述自適應參考方法應該由軟件實現,但實際上,期望MCU或處理器使用純軟件完成它可能不切實際,因為視頻應用是實時的,MCU或處理器可能缺乏資源。作為一種解決方案,ADI ADXL313W加速度計具有交流模式操作和內置32深度FIFO,這極大地有助于實現自適應參考方法,即使在資源受限的后端MCU或處理器中也能實現精確的加速度測量。交流模式操作允許ADXL313W保留測量數據作為下一個周期計算的基準,內置的32 FIFO使ADXL313W能夠保存多達32字的測量數據,這兩者都大大減輕了后端MCU或處理器的負載。
圖5是ADXL313W交流模式操作的流程圖。一旦交流模式操作被激活,ADXL313W將自動保留先前測量的數據,作為下一個周期與預定義閾值進行比較的基準;如果超過閾值,中斷信號將激活,通知MCU或處理器進行處理。在流程圖中,延遲X ms設置為兩個測量周期之間的間隔時間,可以根據應用進行微調。
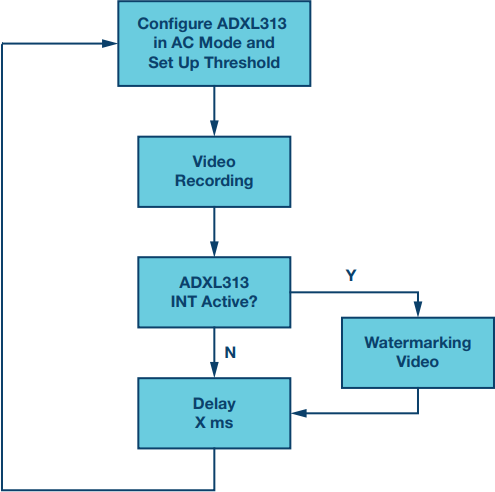
圖5.利用ADXL313W交流模式進行精確加速度計算的流程圖。
圖6是ADXL313W 32先進先出操作的流程圖。啟用32 FIFO模式操作后,ADXL313W將自動在FIFO中保留最多32字的數據,如果FIFO已滿,則中斷信號激活,以相應地通知MCU或處理器。

圖6.利用ADXL313W FIFO進行精確加速度計算的流程圖。
結論
現代車載DVR或OBD需要精確的加速度檢測和測量,以便以有限的內存大小記錄感興趣的水印視頻。測量誤差主要由地球重力偏移和車輛振動引入,并且具有不可預測性,這給系統設計人員帶來了設計挑戰。自適應參考方法可以通過軟件實現以消除誤差,但實際上這可能不切實際,因為DVR或OBD系統很容易受到資源限制。ADI ADXL313W加速度計具有交流模式操作和32深度FIFO,極大地有助于實現自適應參考方法,同時顯著減輕后端MCU或處理器的負擔。ADXL313W結合汽車級認證、高分辨率、低噪聲和低功耗等更多特性,有助于大幅提高DVR系統性能。
審核編輯:郭婷
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753080 -
CMOS
+關注
關注
58文章
5710瀏覽量
235415 -
mems
+關注
關注
129文章
3924瀏覽量
190583
發布評論請先 登錄
相關推薦
使用MEMS加速度計和自適應參考方法助于大幅提高DVR系統性能





 工商網監
工商網監
評論