 VASS05機器人2.20系統ProConOS_IO生成文件使用的接口
VASS05機器人2.20系統ProConOS_IO生成文件使用的接口
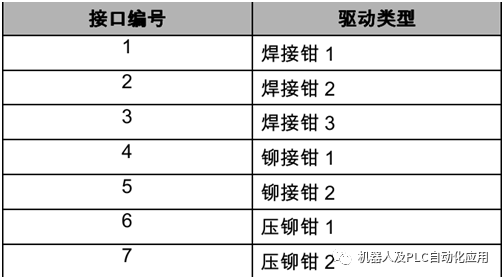
生成文件使用的接口:
2.選擇激活ProConOS_IO,激活軟件后開始進行尋找設備IO激活外部軸E1.
IO區域 焊鉗1從705開始 焊鉗2從865開始, 焊鉗3從1025開始.
鉚鉗1 從1185開始, 鉚鉗2 從1265 開始. 壓鉚鉗1從 1345開始
壓鉚鉗2 從1425開始.
編輯:黃飛
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28380瀏覽量
206919 -
IO接口
+關注
關注
0文章
31瀏覽量
13403
原文標題:VASS05機器人2.20系統ProConOS_IO接口解析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是工業機器人
機械手之間有防護墻隔開,操作者可通過觀察窗或閉路電視對從機械手操作機進行有效的監視,主從機械手系統的出現為機器人的產生為近代機器人的設計與制造作了鋪墊。1954年美國戴沃爾最早提出了工業機器人
發表于 01-19 10:58
如何系統性地學習工業機器人技術?
`如何系統性地學習工業機器人技術?對于一個還沒入門的想學機器人的小白而言,想快速見到成效的的話,找一所對自己胃口的機器人培訓機構是很關鍵的,當然自己本身的決心和毅力離也很重要。工業
發表于 03-06 12:56
機器人VS人:替代還是協作?
財經新聞 2016年,第一財經發布智能寫稿機器人“DT稿王”在商業領域,剛剛過去的有著“廣告界奧斯卡”之稱的戛納國際創意節上,阿里正式發布了一款可以根據商品自動生成文案,并且文案品質與人寫文案已無二致
發表于 09-20 16:07
機器人系統是什么?
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及
發表于 09-10 10:44
焊接機器人的結構與原理
、焊接參數等,并自動生成一個連續執行全部操作的程序。完成示教后,只需給機器人一個起動命令,機器人將精確地按示教動作,一步步完成全部操作,實際示教與再現。焊接機器人結構:1、
發表于 11-16 16:18
機器人的控制系統
1、機器人的控制系統“控制”的目的是使被控對象產生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本
發表于 09-13 08:40
ProConOS是一款高性能PLC運行時間引擎
KUKA.PLC ProConOS是一個運行時間系統,工藝程序包 KUKA.PLC Multiprog使用該系統執行機器人控制系統上的 虛擬
VASS05機器人2.20系統ProConOS_IO接口解析
ProConOS和機器人控制器之間的布爾值交換
$SOFTPLCBOOL[] ProConOS和機器人控制器之間的布爾值交換 借助Mulitprog庫KrcExVarLib的功能塊,可以從數組變量中讀取單個或多個值,也可以將其寫入數組變量






 工商網監
工商網監
評論