 用于電機控制的Σ-Δ轉換
用于電機控制的Σ-Δ轉換
?-Δ模數轉換器廣泛用于需要高信號完整性和電氣隔離的電機驅動器。雖然Σ-Δ技術本身已廣為人知,但轉換器的使用方式往往無法釋放該技術的全部潛力。本文從應用角度探討Σ-Δ型ADC,并討論如何在電機驅動器中獲得最佳性能。
介紹
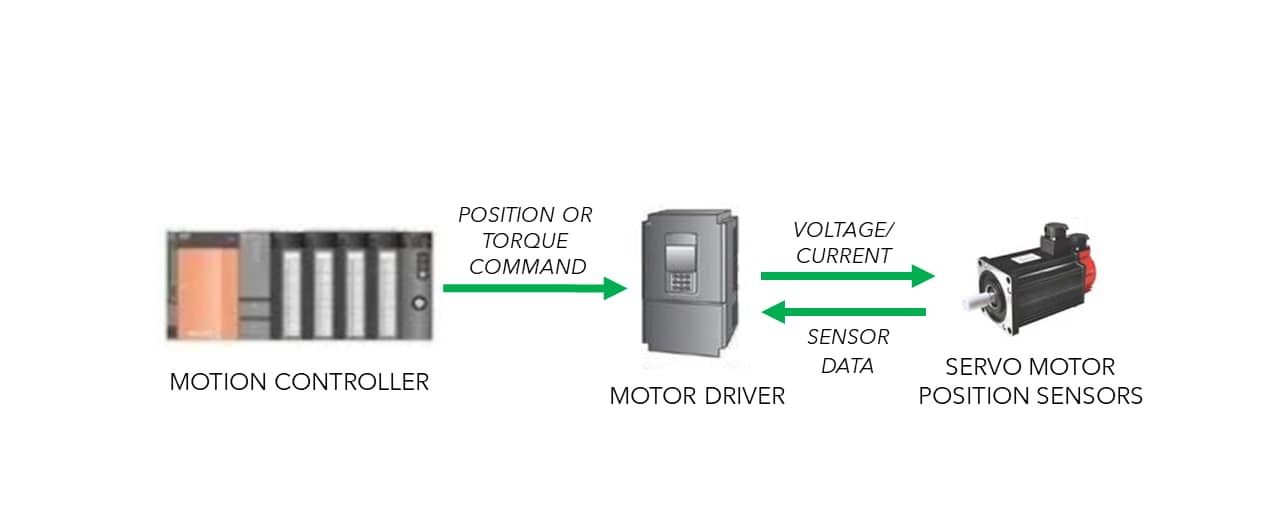
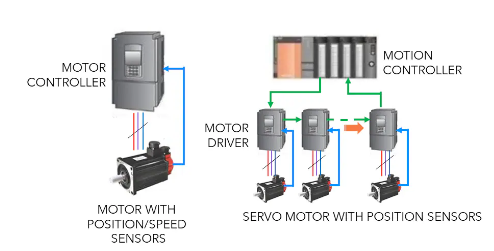
當涉及到三相電機驅動器中的隔離相電流測量時,有幾種技術可供選擇。圖 1 概述了三種常用方法;隔離式傳感器(如霍爾效應或電流互感器)與放大器組合,電阻分流器與隔離放大器組合,電阻分流器與隔離 Σ-Δ ADC 組合。
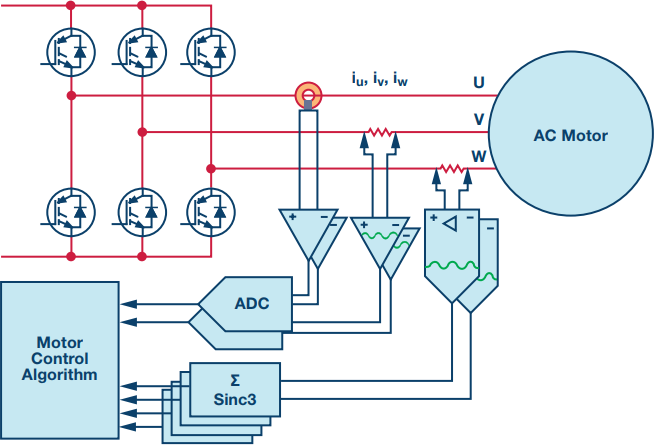
圖1.三相電機驅動器的通用電流測量技術。
本文重點介紹性能最高的方法 — Σ-Δ 轉換。通常,Σ-Δ型ADC面向需要高信號質量和電氣隔離的變頻電機驅動器和伺服應用。與ADC一起的是解調和濾波,通常由FIR濾波器(如3RD-訂購 sinc 過濾器 (sinc3)。
Σ-Δ ADC具有1位的最低分辨率,但通過過采樣、噪聲整形、數字濾波和抽取,可以實現非常高的信號質量。Σ-Δ型ADC和sinc濾波器背后的理論已廣為人知,并有據可查,1, 2因此,本文將不討論。相反,重點將放在如何在電機驅動器中獲得最佳性能以及如何在控制算法中利用性能。
使用 Σ-Δ 模數轉換器測量相電流
當三相電機由開關電壓源逆變器供電時,相電流可以看作是兩個分量:平均分量和開關分量,如圖2所示。頂部信號顯示一相電流,中間信號顯示逆變器相位臂的高邊PWM,下方信號顯示來自PWM定時器的采樣同步信號,PWM_SYNC。PWM_SYNC在PWM周期的開始和中心置位,因此它與電流和電壓紋波波形的中點對齊。為簡單起見,假設所有三相都以50%的占空比運行,這意味著電流只有一個上升斜率和一個下降斜率。
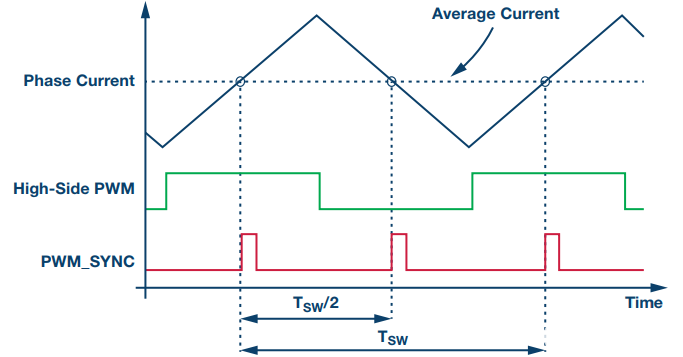
圖2.相電流在PWM周期的開始和中心假定平均值。
出于控制目的,僅關注電流的平均分量。提取平均分量的最常見方法是對同步到PWM_SYNC的信號進行采樣。在這些情況下,電流取其平均值,因此,如果嚴格控制采樣時刻,則采樣不足是可能的,而不會受到混疊的影響。
對于傳統的逐次逼近(SAR)ADC,采樣由專用的采樣保持電路完成,從而用戶可以嚴格控制采樣時刻。另一方面,Σ-Δ轉換是一個連續的采樣過程,需要其他方法來提取電流的平均值。為了更好地理解手頭的問題,Σ-Δ信號鏈的高級視圖很有幫助,如圖3所示。

圖3.使用Σ-Δ轉換時的信號鏈。
第一個元素是轉換器本身。通過對幾MHz的模擬信號進行采樣,信號被轉換為1位數據流。此外,轉換器對量化噪聲進行整形并將噪聲推到更高的頻率。轉換器之后是濾波器和抽取形式的解調。濾波器將1位信號轉換為多位信號,抽取過程降低更新速率,使其與控制算法的更新速率相匹配。濾波和抽取可以分兩個階段完成,但一種非常常見的方法是使用sinc濾波器,它可以在一個階段中完成這兩個階段。sinc濾波器可以在FPGA中實現,或者隨著過濾器的普及,濾波器也可以是微處理器中的標準外設。3無論 sinc 濾波器是如何實現的,3RD-order (sinc3) 是最受歡迎的變體。
從控制角度來看,ADC是理想的——通常為10 MHz至20 MHz的轉換速率在帶寬為幾kHz的控制環路中引入微不足道的延遲。然而,sinc3濾波器引入了延遲,使得無法談論一個定義的采樣時刻。為了更好地掌握這一點,濾波器在復頻域G(z)中的表示很有幫助:

DR 是抽取率,N 是階數。濾波器是 N 個積分器 (1/(1 – z–1)) 在采樣頻率和 N 微分器 (1 – z ) 下更新–DR) 在抽取頻率(采樣頻率/DR)處更新。濾波器具有存儲器,這意味著電流輸出不僅取決于電流輸入,還取決于先前的輸入和輸出。濾波器的行為最好通過繪制濾波器脈沖響應來說明:
其中y是輸出序列,x是輸入序列,h是系統脈沖響應。由于sinc濾波器是一個線性和時間不變的系統,因此脈沖響應h[n]可用于確定任何時間對任何輸入的響應。例如,3RD抽取率為5的階sinc濾波器如圖4所示。
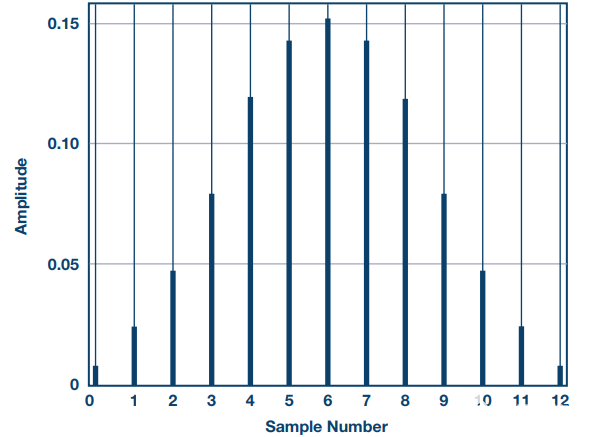
圖4.脈沖響應 3RD-訂購 sinc3 濾波器,抽取率為 5。
可以看出,濾波器是一個加權和,它為中心的樣本賦予更多的權重,而為序列開始/結束時的樣本賦予更少的權重。由于相電流的開關分量,必須考慮到這一點,否則反饋將受到混疊的影響。幸運的是,脈沖響應是對稱的,這意味著sinc濾波器對中心引腳之前和之后的樣本給予相同的權重。此外,相電流的開關分量圍繞平均電流點對稱。也就是說,如果在平均電流時刻之前采集 x 等間距樣本,并將其添加到平均電流時刻之后采集的 x 等間距樣本,則開關分量的總和為零。這是通過將脈沖響應的中心引腳與PWM_SYNC脈沖對齊來實現的,如圖5所示。
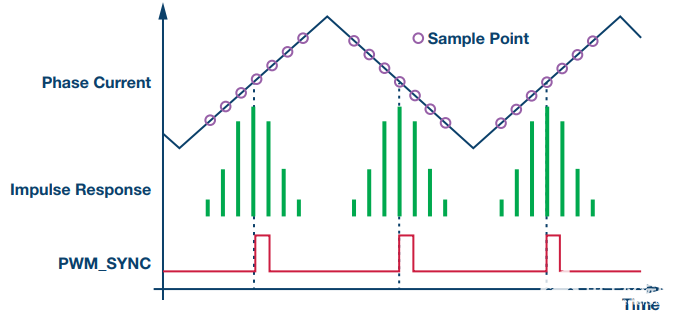
圖5.將sinc濾波器脈沖響應與PWM對齊。
為了將脈沖響應與PWM正確對齊,必須知道脈沖響應的長度。脈沖響應中的引腳數為 3RD-順序過濾器為:

使用此公式,脈沖響應的長度(以秒為單位)可以計算為:

跟tM是調制器時鐘的周期。這個時間很重要,因為它告訴樣本通過過濾器傳播需要多長時間。脈沖響應的中心引腳正好是總濾波器長度的一半,因此樣本傳播到一半所需的時間必須為:
因此,如果輸入采樣開始τd讀取篩選器中的PWM_SYNC和數據之前τdPWM_SYNC后,對齊將如圖 5 所示。采樣的開始由調制器時鐘的使能/禁用控制。一旦啟用,濾波器將與PWM保持同步,無需重新對齊。
控制時序
通過將脈沖響應與PWM_SYNC對齊,可以在沒有混疊的情況下測量相電流,但在從濾波器讀取數據時必須格外小心。sinc濾波器已啟動τd在PWM_SYNC之前,但需要 2 × τd以便數據通過過濾器傳播。換句話說,等待至關重要τd在PWM_SYNC之后,從篩選器讀取數據之前。只有此時此刻,電流的真實平均值才可用。與基于 SAR 的電流測量相比,這在控制調度方面有所不同,如圖 6 所示。

圖6.控制算法的調度,(a) 使用 SAR ADC,(b) 使用 Σ-Δ ADC
在SAR情況(a)中,PWM_SYNC脈沖觸發ADC進行多次采樣和轉換。當數據準備好進入控制環路時,將生成中斷并開始執行控制環路。在Σ-Δ情況下,等待不是ADC,而是讓數據通過sinc濾波器傳播。當數據準備就緒時,將生成中斷,指示可以執行控制環路。打個比方,SAR ADC的轉換時間相當于半個脈沖響應的持續時間。半脈沖響應的長度取決于調制時鐘和抽取率。典型配置fM= 20 MHz 和 DR = 100,導致脈沖響應的一半取 τd= 7.4 微秒。雖然比快速SAR ADC略長,但數字具有可比性。
應該注意的是,在典型的控制系統中,PWM定時器的零階保持效應遠遠超過脈沖響應的一半,因此sinc濾波器不會對環路時序產生很大影響。
Σ-Δ型ADC對控制性能的影響
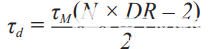
利用Σ-Δ型ADC,用戶可以在sinc濾波器延遲和輸出數據保真度之間自由選擇。在高抽取率下,延遲很長,但信號質量很高。在低抽取率下,情況正好相反。在電機控制算法設計方面,這種靈活性是一個優勢。通常,算法的某些部分對延遲敏感,但對反饋的準確性不太敏感。該算法的其他部分以較低的動態工作,并受益于準確性,但對延遲不太敏感。例如,圖7 (a)顯示了傳統的比例積分控制器(PI)。4, 5P部分和I部分使用相同的反饋信號工作,這意味著信號必須具有適合兩個控制路徑的動態。但是,可以拆分P路徑和I路徑,如圖7(b)所示,從此階段開始,這是圖7(c)的一小步,其中P路徑和I路徑是分開的,并使用具有不同動態特性的反饋信號工作。

圖7.PI 控制器實現。(a)常規實現,(b)拆分P路徑和I路徑,(c)拆分P路徑和I路徑和拆分反饋。
P部分的任務是抑制快速負載變化和快速速度變化,但精度不是主要關注點。換言之,P部分將受益于具有低抽取率和短延遲的sinc濾波器。I部分的任務是確保穩定準確的穩態性能,這需要高精度。因此,I部分將受益于具有高抽取率和更長延遲的sinc濾波器。這導致了如圖 8 所示的實現。
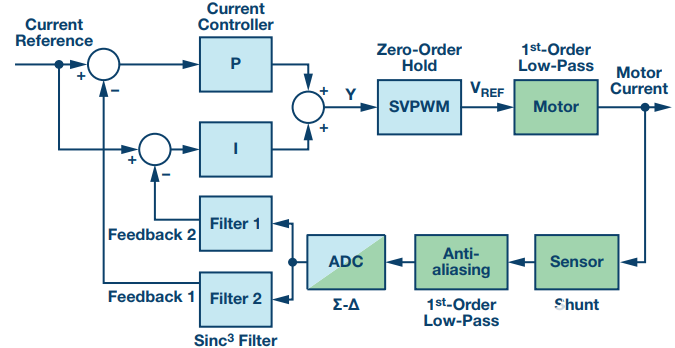
圖8.雙sinc濾波器和獨立的P路徑和電流控制器的I路徑。
電機相電流由傳感器(分流器)測量,并通過饋送到Σ-Δ ADC的抗混疊濾波器測量。然后將 1 位數據流輸入到兩個 sinc濾波器中,一個針對 P 控制器調諧,另一個針對 I 控制器調諧。在圖 8 中,為簡單起見,省略了 Clark 和 Park 變換。但是,電流控制是在旋轉的dq幀中完成的。
為了評估將電流反饋分成兩條路徑的影響,對閉環進行了穩定性分析。對于傳統的Z域分析,sinc濾波器帶來了問題。它引入了延遲,對于任何實際抽取率,延遲小于一個采樣周期。例如,如果系統以 f 運行西 南部= 10 kHz,濾波器的延遲將小于100 μs。從控制環路的角度來看,sinc模塊是一個分數延遲濾波器。為了模擬分數延遲,sinc濾波器由全通濾波器近似。在較低頻率(最高約為奈奎斯特頻率的一半)下,近似值是準確的,但在較高頻率下,與理想濾波器存在一些偏差。但是,這里的目的是了解雙反饋如何影響環路穩定性,為此,近似值可以很好地發揮作用。
為了進行比較,圖9 (a)顯示了在反饋路徑中僅使用一個sinc濾波器(無雙反饋)時的閉環幅度響應。開關頻率fsw為10 kHz,將奈奎斯特頻率設置為5 kHz。利用這些系統參數,繪制sinc濾波器組延遲范圍為0 μs至80 μs的閉環響應。請注意,群延遲與抽取率直接相關。正如預期的那樣,低抽取率和群延遲對閉環穩定性影響不大,但隨著延遲的增加,系統的阻尼越來越小。
圖9.雙反饋對電流控制性能的影響,(a)P控制器和I控制器使用共享sinc濾波器,(b)P控制器和I控制器使用單獨的sinc濾波器。
現在,當將P控制器和I控制器的反饋分成單獨的路徑時,得到圖9(b)。在這種情況下,P控制器的sinc濾波器的抽取率固定為10 μs的群延遲。只有I控制器的抽取率是變化的。
如圖9 (b)所示,增加I控制器的延遲對閉環穩定性的影響很小。如前所述,這些特性可用于提高環路的動態和穩態性能。
在本文中,使用拆分反饋的算法是PI控制器。然而,這只是一個例子,大多數控制系統都有幾種算法,可以根據動態和精度要求調整反饋。一些例子是PID控制器的磁通觀察器、前饋控制器和差分部分。
過濾技術
濾波器具有有限的衰減,打開/關閉逆變器IGBT產生的一些開關噪聲將通過濾波器。本節將探討一種有助于消除電流反饋中的開關噪聲的技術。
如果電機由使用標準空間矢量調制(SVPWM)的電壓源逆變器驅動6) 相電流的噪聲頻譜將以開關頻率的整數倍為中心的邊帶來表征。例如,如果使用10 kHz開關頻率,則n×10 kHz附近會出現高水平的噪聲,n為整數。典型光譜如圖10中的綠色曲線所示。這些邊帶會在電流反饋中引入噪聲,因此需要有效衰減。
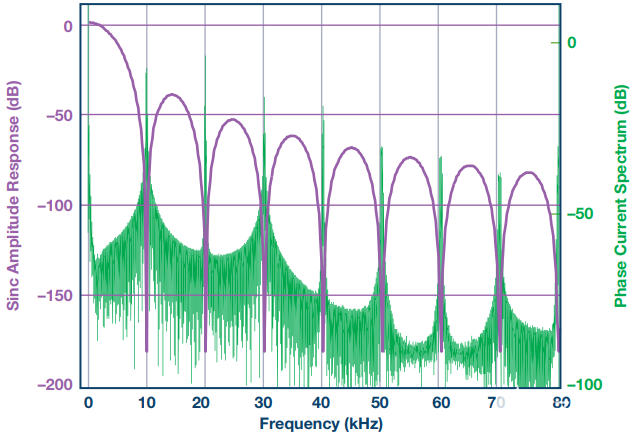
圖 10.相電流的功率譜(綠色)以及sinc濾波器幅度響應(紫色)。
sinc濾波器的極點/零點的位置由抽取率和調制頻率決定。這意味著用戶可以自由調整濾波器的頻率響應,以最適合應用。幅度響應為 3RD-階sinc濾波器如圖10中的紫色曲線所示。正如預期的那樣,幅度在較高頻率下逐漸消失,但幅度在衰減接近無窮大的地方也具有特征陷波。陷波的頻率由調制器時鐘和抽取率決定:
如果將陷波置于與相電流頻譜邊帶相同的頻率,則逆變器開關噪聲會非常有效地衰減。例如,考慮逆變器開關頻率f西 南部為 10 kHz,ADC 調制器時鐘fM為 8 MHz,抽取率 DR 為 800。這使陷波頻率為n×10 kHz,響應如圖10所示。注意每個邊帶是如何衰減一個陷波的。
sinc濾波器的某些硬件實現不支持足夠高的抽取率,無法在PWM頻率周圍放置一個極點/零點。此外,與如此高的抽取率相關的濾波器群延遲可能是不可接受的。在圖10中使用的示例中,抽取率為800,調制頻率為8 MHz,延遲為150 μs。
另一種方法是讓sinc濾波器以較低的抽取率運行,然后在軟件中對數據進行后處理。仍然假設 f西 南部= 10 kHz 和fM為8 MHz,一種可能的方法是讓硬件sinc濾波器以200的抽取率運行,從而獲得8 MHz的數據速率,200為40 kHz。現在,該數據速率對于電機控制算法來說太高了,因此可以引入一個SW濾波器,將數據速率降至10 kHz。此類篩選器的一個示例是 1圣-訂購抽取率為 4 的 sinc 濾波器(實際上是超過 4 個樣本的移動平均值)。此配置如圖 11 所示。

圖 11.結合硬件和SW sinc濾波器。
由于硬件濾波器以高于控制算法所需的速率輸出數據,因此SW濾波器對信號增加的延遲很小,遠低于直接使用硬件濾波器抽取到控制算法更新速率的情況。此外,sinc1濾波器仍然在相電流頻譜的所有邊帶上放置一個陷波。因此,高度衰減逆變器開關噪聲的好處仍然存在。
濾波技術可以與分離反饋路徑結合使用。由于硬件和SW sinc濾波器的組合提供了非常高的衰減,但為電流反饋增加了一些相位,因此該技術最適合I路徑。
實施和測試
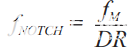
本文中描述的概念已在ADI公司的400 V電機控制平臺上實現和驗證,見圖12。電源板具有通用 110 V交流/230 V交流輸入電壓,升壓功率因數校正,額定連續 5 ARMS 的 3 相 IGBT 逆變器。電機是科爾摩根AKM22 3相永磁伺服電機,帶有增量編碼器反饋。用于電流反饋的Σ-Δ型ADC為AD7403。Σ-Δ型ADC直接與處理器ADSP-CM408接口,該處理器內置sinc濾波器,支持本文所述的測量技術。有關詳細信息,請參閱。7
圖 12.用于評估的硬件平臺。
結論
盡管缺乏定義的采樣瞬時,但Σ-Δ轉換可用于測量電機電流,而不會產生混疊效應。所描述的技術可將sinc濾波器脈沖響應與PWM信號正確對齊。
以PI控制器為例,可以調整并行sinc濾波器以匹配控制算法的要求。結果是提高了帶寬和穩態性能。
最后,討論了如何仔細定位sinc濾波器零點有助于消除電流反饋中的開關噪聲。所有概念都在驅動永磁電機的400 V逆變器上實現和驗證。
審核編輯:郭婷
-
驅動器
+關注
關注
52文章
8226瀏覽量
146253 -
控制器
+關注
關注
112文章
16332瀏覽量
177812 -
電機
+關注
關注
142文章
9001瀏覽量
145340
發布評論請先 登錄
相關推薦
用于電機控制系統與設計(7)
用于電機控制系統與設計(5)
用于電機控制系統與設計(4)
用于電機控制系統與設計(10)
Σ-Δ轉換用于電機控制
可用于電機控制和DC/DC轉換器控制的最好的MCU是什么?
Σ-Δ轉換用于電機控制
安森美半導體推用于電源轉換和電機控制的新功率集成模塊
Σ-Δ轉換用于電機控制

如何從電機控制轉換為運動控制
開環電機和閉環電機不同的電機控制方式
如何從電機控制轉換為運動控制





 工商網監
工商網監
評論