") 替代激光雷達(dá)?4D毫米波雷達(dá):汽車感知下半場(chǎng)!
替代激光雷達(dá)?4D毫米波雷達(dá):汽車感知下半場(chǎng)!
在汽車智能化發(fā)展道路中,感知系統(tǒng)是至關(guān)重要的一環(huán),理想的自動(dòng)駕駛系統(tǒng)需要全天候、全覆蓋、全目標(biāo)、全工況的感知。當(dāng)前的自動(dòng)駕駛技術(shù)水平離理想目標(biāo)還有較大差距,為了實(shí)現(xiàn)高階自駕,需要在全頻段上構(gòu)建感知系統(tǒng),有效融合各頻段傳感器的優(yōu)勢(shì),為規(guī)劃控制提供準(zhǔn)確有效的信息。 現(xiàn)階段自動(dòng)駕駛技術(shù)中,主要用到的傳感器有攝像頭、激光雷達(dá)和毫米波雷達(dá),圖1展示了各類傳感器頻譜范圍。從圖中可以看出攝像頭的光譜從可見光到紅外光譜,是最接近人眼的傳感器,有豐富的語義信息,在傳感器中具有不可替代的作用,比如紅綠燈識(shí)別、交通標(biāo)識(shí)識(shí)別,都離不開攝像頭的信息。
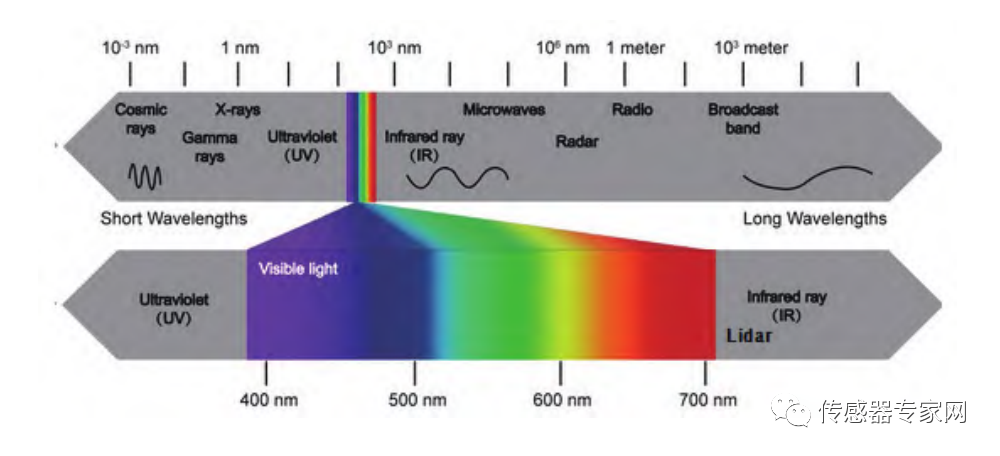
圖1 各傳感器頻段示意圖 激光雷達(dá)器件較為成熟,在905 nm和1550 nm波段廣泛應(yīng)用,能獲得豐富的場(chǎng)景立體空間信息。從頻譜可以看到,激光在頻譜上和可見光較為接近,因此和可見光有著相似的粒子特性,容易受到惡劣天氣的影響。而77 GHz毫米波雷達(dá)波長(zhǎng)為3.9 mm左右,是這幾種傳感器中波長(zhǎng)最長(zhǎng)的傳感器,全天候性能最好,且具備速度探測(cè)優(yōu)勢(shì)。
攝像頭和激光雷達(dá)由于有較為豐富的信息,前期的自動(dòng)駕駛感知研究主要集中這兩類傳感器,毫米波由于分辨率不足導(dǎo)致其在使用上存在局限性。近年來,各大毫米波廠商在4D成像毫米波雷達(dá)上加大投入,在波形設(shè)計(jì)和超大天線陣列兩個(gè)方向上取得了一些進(jìn)展,這使得4D成像毫米波系統(tǒng)的研究成為了自動(dòng)駕駛研究的熱點(diǎn)之一。
4D毫米波雷達(dá)突破了傳統(tǒng)雷達(dá)的局限性
隨著毫米波芯片技術(shù)的發(fā)展,應(yīng)用于車載的毫米波雷達(dá)系統(tǒng)得到了大規(guī)模應(yīng)用,然而傳統(tǒng)雷達(dá)系統(tǒng)面臨著以下缺陷:當(dāng)有靜止車輛,目標(biāo)信息容易和地雜波等摻雜在一起,識(shí)別難度較大,而移動(dòng)車輛可以靠多普勒識(shí)別。當(dāng)有橫穿車輛和行人, 多普勒為零或很低,難以檢測(cè)。 沒有高度信息,高處物體如橋梁路牌和地面的車輛一樣區(qū)分不開,容易造成誤剎,影響安全性。角度分辨率低,當(dāng)兩個(gè)距離很近的物體,其回波會(huì)被混在一起,很難知道有幾個(gè)目標(biāo)。 用雷達(dá)散射截面積區(qū)分物體難:可以通過不同物體的雷達(dá)散射截面積的不同和不同幀之間的反射點(diǎn)的不同來區(qū)分路牌、立交橋和車輛,然而準(zhǔn)確率并不高。最遠(yuǎn)探測(cè)距離不超過200 m,探測(cè)距離范圍有限。
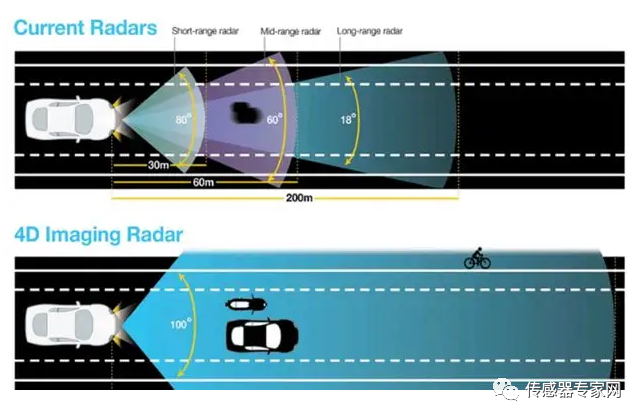
而4D成像毫米波雷達(dá)技術(shù)突破了傳統(tǒng)車載雷達(dá)的局限性,可以以很高的分辨率同時(shí)探測(cè)目標(biāo)的距離、速度、水平方位和俯仰方位,使得最遠(yuǎn)探測(cè)距離大幅可達(dá)約300 m,比激光雷達(dá)和視覺傳感器都要遠(yuǎn)。4D成像毫米波雷達(dá)系統(tǒng)水平角度分辨率較高,通常可以達(dá)到1°的角度分辨率,可以區(qū)分300 m處的兩輛近車。
4D成像毫米波雷達(dá)系統(tǒng)可以測(cè)量俯仰角度,可達(dá)到優(yōu)于2°的角度分辨率,可在150 m處區(qū)分地物和立交橋。當(dāng)有橫穿車輛和行人,多普勒為零或很低時(shí)通過高精度的水平角和高精度的俯仰角可以有效識(shí)別目標(biāo)。目標(biāo)點(diǎn)云更密集,信息更豐富,更適合與深度學(xué)習(xí)框架結(jié)合。
4D毫米波雷達(dá)的哪些先驅(qū)者
為對(duì)4D成像雷達(dá)系統(tǒng)有更系統(tǒng)的認(rèn)識(shí),這里列舉近年來市面上幾種常見的成像雷達(dá)系統(tǒng)方案,其中包括TI公司、Arbe公司和Uhnder公司。TI級(jí)聯(lián)方案——毫米波成像雷達(dá)系統(tǒng)的開辟者 在TI公司早期推出的毫米波雷達(dá)芯片AWR1243中通過發(fā)射FMCW信號(hào)來探測(cè)目標(biāo)的距離和速度,而使用時(shí)分波形的方式將三個(gè)發(fā)射和四個(gè)接收構(gòu)成的12個(gè)虛擬通道來探測(cè)角度,然而受限于角度分辨率,其獲取的目標(biāo)信息有效。 而TI公司于2019年推出了自己的毫米波雷達(dá)系統(tǒng)級(jí)聯(lián)方案,其級(jí)聯(lián)效果如圖2中所示,通過將四個(gè)三發(fā)四收的單個(gè)MIMO芯片級(jí)聯(lián)方案可以構(gòu)成12發(fā)16收的MIMO雷達(dá)陣列,此時(shí)雷達(dá)系統(tǒng)的虛擬通道數(shù)可從12提升到了192,該方法可以極大地提升雷達(dá)系統(tǒng)的角度分辨率。在圖2所使用的級(jí)聯(lián)雷達(dá)系統(tǒng)中水平角度分辨率可達(dá)到1.4°,俯仰角度分辨率可達(dá)到18°的效果。
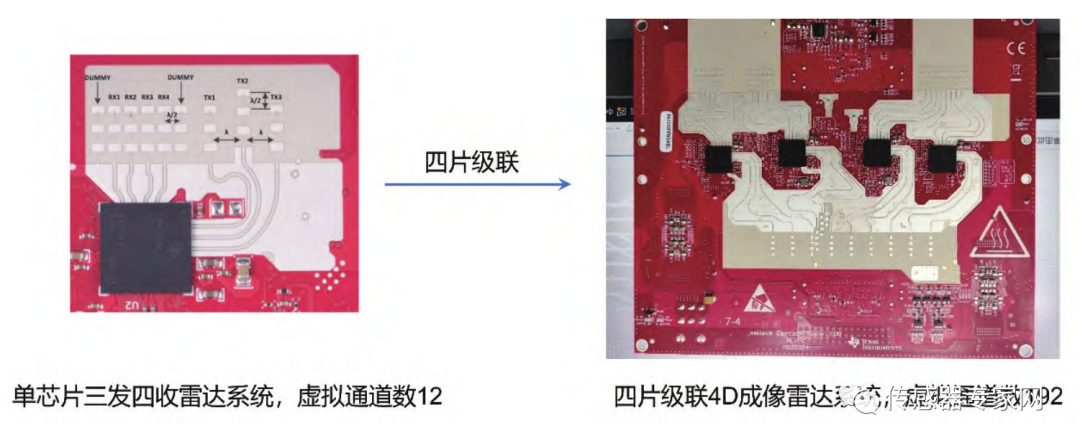
圖2 TI級(jí)聯(lián)系統(tǒng)實(shí)物圖 目前國(guó)內(nèi)有不少?gòu)S商依托于TI成像雷達(dá)系統(tǒng)的級(jí)聯(lián)方案進(jìn)行系統(tǒng)改進(jìn),以達(dá)到更好的角度分辨率,級(jí)聯(lián)方案來搭建成像雷達(dá)系統(tǒng)已成為當(dāng)下的主流技術(shù)。 Arbe毫米波成像雷達(dá)系統(tǒng)——超大陣列和專用處理器方案 除了TI公司開發(fā)的級(jí)聯(lián)雷達(dá)系統(tǒng)方案,以色列Arbe公司開發(fā)出了目前最大的48發(fā)48收級(jí)聯(lián)雷達(dá)系統(tǒng)方案,其虛擬通道數(shù)可以達(dá)到驚人的2304,大大提升了毫米波雷達(dá)系統(tǒng)的角度分辨率,與此同時(shí)隨著虛擬通道數(shù)的增加,傳統(tǒng)的處理器無法解決毫米波雷達(dá)系統(tǒng)信號(hào)處理和數(shù)據(jù)處理,Arbe公司也推出了自己的專用毫米波雷達(dá)處理器芯片,使得毫米波雷達(dá)系統(tǒng)的集成度更高,數(shù)據(jù)處理更加高效。 圖3為Arbe公司成像雷達(dá)系統(tǒng)實(shí)物圖,從圖中可以看出該成像雷達(dá)系統(tǒng)采用口字型陣列來設(shè)計(jì)MIMO雷達(dá)陣列,可同時(shí)在水平維度和俯仰維度探測(cè)目標(biāo)。圖4為Arbe公司雷達(dá)專用處理器框圖,從其展現(xiàn)的框圖中可以看出,在該專用處理器中增加了其獨(dú)有的雷達(dá)信號(hào)處理硬件加速模塊,以更好地解決成像雷達(dá)系統(tǒng)中數(shù)據(jù)高吞吐量的問題。
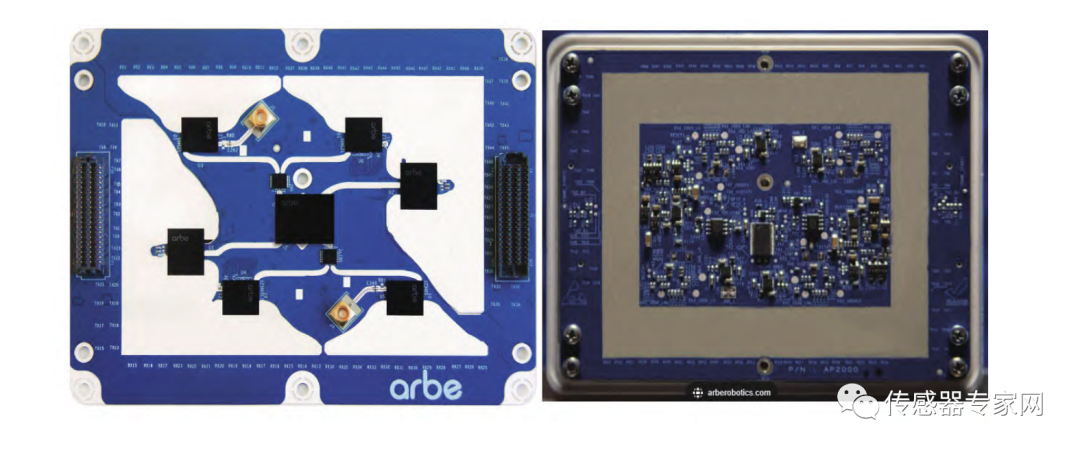
圖3 Arbe成像雷達(dá)系統(tǒng)實(shí)物圖
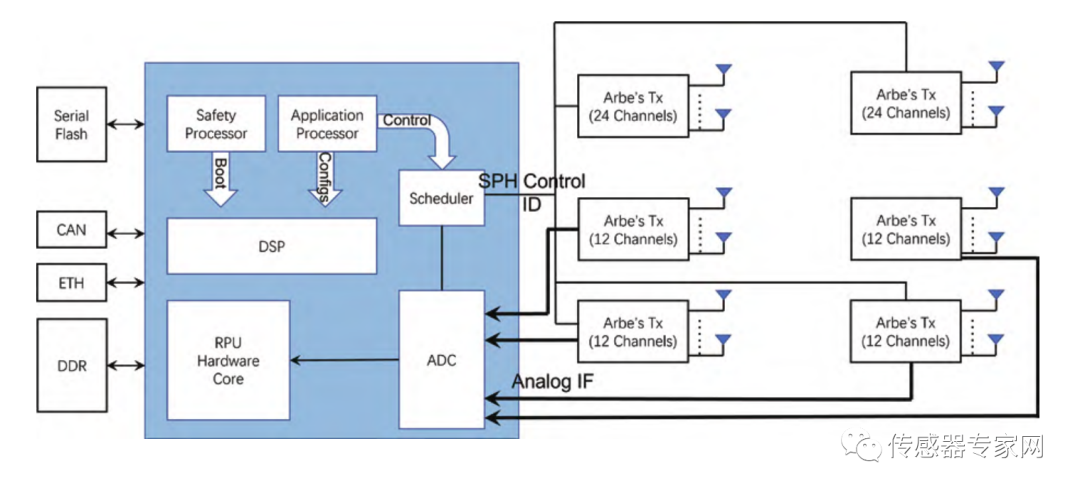
圖4 Arbe成像雷達(dá)系統(tǒng)專用處理器框圖 從Arbe的技術(shù)方案中可以看出,超大規(guī)模的MIMO陣列將可能是一種技術(shù)趨勢(shì),而在使用超大規(guī)模MIMO陣列后需要考慮產(chǎn)生的海量數(shù)據(jù)如何有效處理的問題,因此專用的成像雷達(dá)系統(tǒng)硬件加速模塊是需要的,關(guān)于這點(diǎn)國(guó)內(nèi)還比較空白。 Uhnder公司——PMCW雷達(dá)的領(lǐng)跑者 不同于傳統(tǒng)FMCW信號(hào)波形,Uhnder公司采用的PMCW波形通過多天線同時(shí)發(fā)射正交相位編碼信號(hào)的方式來探測(cè)目標(biāo)的距離和速度,該方案不僅可以探測(cè)更遠(yuǎn)距離,同時(shí)在有效探測(cè)目標(biāo)的同時(shí)可以有效的抗除雷達(dá)與雷達(dá)之間的相互干擾。在19年的ISSCC論文中Uhnder公司已經(jīng)發(fā)表了其相關(guān)研究成果,在單科芯片中集成12發(fā)16收的雷達(dá)陣列。不同于傳統(tǒng)的FMCW雷達(dá)系統(tǒng)方案,該雷達(dá)方案為全數(shù)字雷達(dá)方案,其芯片ADC采樣率可達(dá)2 Gs/s,因此其對(duì)芯片設(shè)計(jì)者也是一大難題。在目前的國(guó)內(nèi)雷達(dá)芯片系統(tǒng)方案中并沒有采用類似方案的報(bào)道。
4D毫米波成像雷達(dá)系統(tǒng)中的難點(diǎn)
總結(jié)以上公司的技術(shù)演進(jìn)路線,我們可以發(fā)現(xiàn),在4D毫米波成像雷達(dá)系統(tǒng)存在多個(gè)亟需解決的技術(shù)難題。 (1)成像雷達(dá)系統(tǒng)的陣列設(shè)計(jì)問題: 在4D毫米波雷達(dá)系統(tǒng)中,通過MIMO使得系統(tǒng)虛擬通道數(shù)得到了極大提升,因此如何設(shè)計(jì)陣列以達(dá)到高精度的角度分辨率成為其中的一個(gè)難題。在已有的學(xué)術(shù)研究中將12個(gè)3發(fā)4收的MIMO芯片進(jìn)行級(jí)聯(lián),構(gòu)成36發(fā)48收MIMO雷達(dá)系統(tǒng),可達(dá)到1728個(gè)虛擬通道。而文中通過遺傳算法來設(shè)計(jì)稀疏陣列,使得雷達(dá)孔徑更大,水平角分辨率可達(dá)到0.78°,俯仰角分辨率可達(dá)到3.6°。可以發(fā)現(xiàn)隨著天線數(shù)的增多,在未來的成像雷達(dá)系統(tǒng)中,其陣列排布和角度分辨率將會(huì)得到更一步的優(yōu)化和提升。
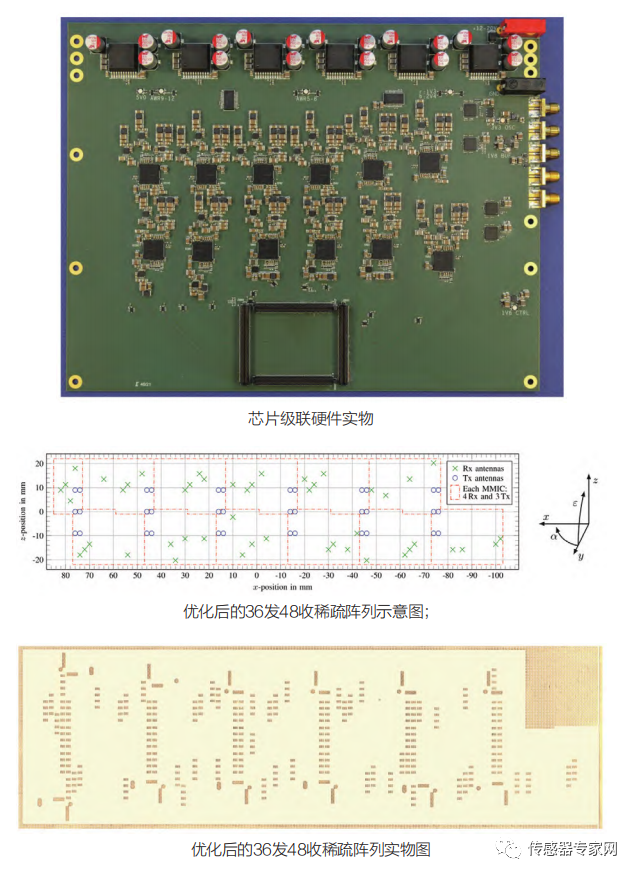
圖5 4D成像雷達(dá)系統(tǒng) (2)成像雷達(dá)波形設(shè)計(jì)問題: 與傳統(tǒng)相控陣?yán)走_(dá)相比,MIMO雷達(dá)的最大特點(diǎn)在于采用波形分集技術(shù)。波形相關(guān)系數(shù)是表示波形分集的重要參數(shù),MIMO雷達(dá)的各天線發(fā)射正交信號(hào),波形間的相關(guān)系數(shù)為0,在空間形成低增益寬波束,接收端通過DBF合成多個(gè)接收波束,實(shí)現(xiàn)覆蓋大空域的探測(cè)。對(duì)于MIMO正交波形設(shè)計(jì),使用者希望設(shè)計(jì)的波形盡可能地具備高分辨率、低旁瓣、良好的正交性,目前常用的四種方法為時(shí)分復(fù)用(TDMA)、頻分復(fù)用(FDMA)、多普勒分集復(fù)用(DDMA)、碼分復(fù)用(CDMA)等。表1中對(duì)各類正交波形做了總結(jié),現(xiàn)有的雷達(dá)芯片中已經(jīng)可以支持交替發(fā)射TDMA、CDMA和DDMA波形,因此如何復(fù)用波形以提升陣列使用效率成為設(shè)計(jì)者應(yīng)該思考的問題。
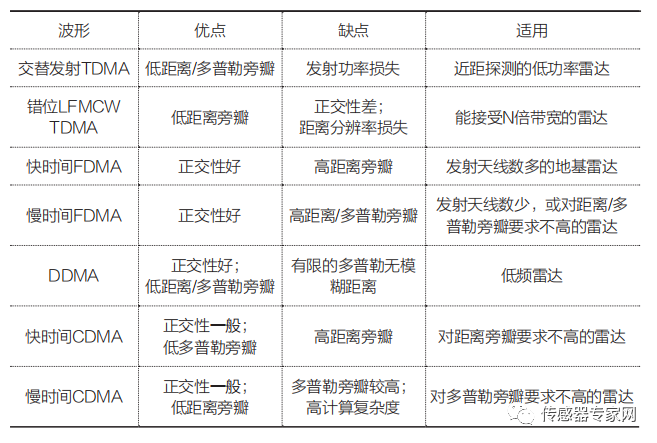
表1 正交波形總結(jié) (3)成像雷達(dá)抗干擾問題: 隨著車輛使用毫米波雷達(dá)系統(tǒng)的增多,雷達(dá)與雷達(dá)之間的干擾日益嚴(yán)重,如圖6中所示雷達(dá)B1和雷達(dá)B2在相同的中心頻率內(nèi)使用線性調(diào)頻信號(hào),很容易產(chǎn)生相互之間的干擾,為此如何消除系統(tǒng)干擾成為待解決的難題。
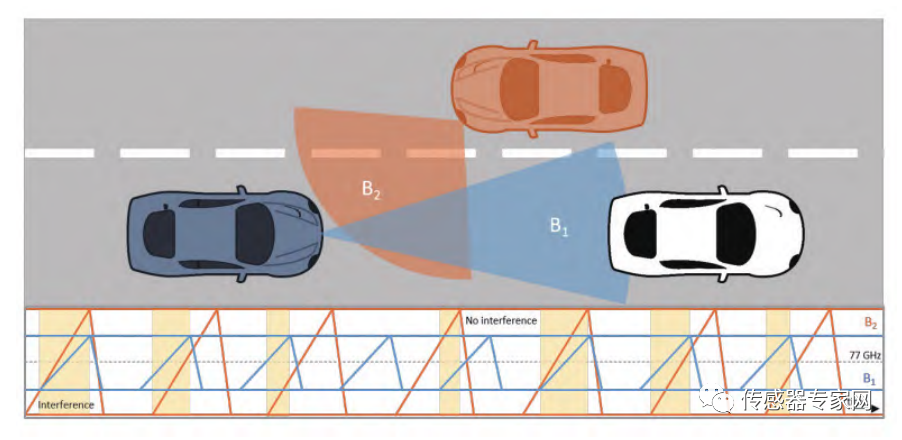
圖6 雷達(dá)與雷達(dá)之間相互干擾示意圖 為此,不同的公司開發(fā)出不同的方案來解決該問題。如圖7中所示,為Arbe公司的波形設(shè)計(jì)專利中使用多個(gè)頻率跳動(dòng)的窄帶信號(hào)合成寬帶信號(hào)來規(guī)避雷達(dá)之間的相互干擾。當(dāng)然,該方法的正確與否還有待研究與挖掘。
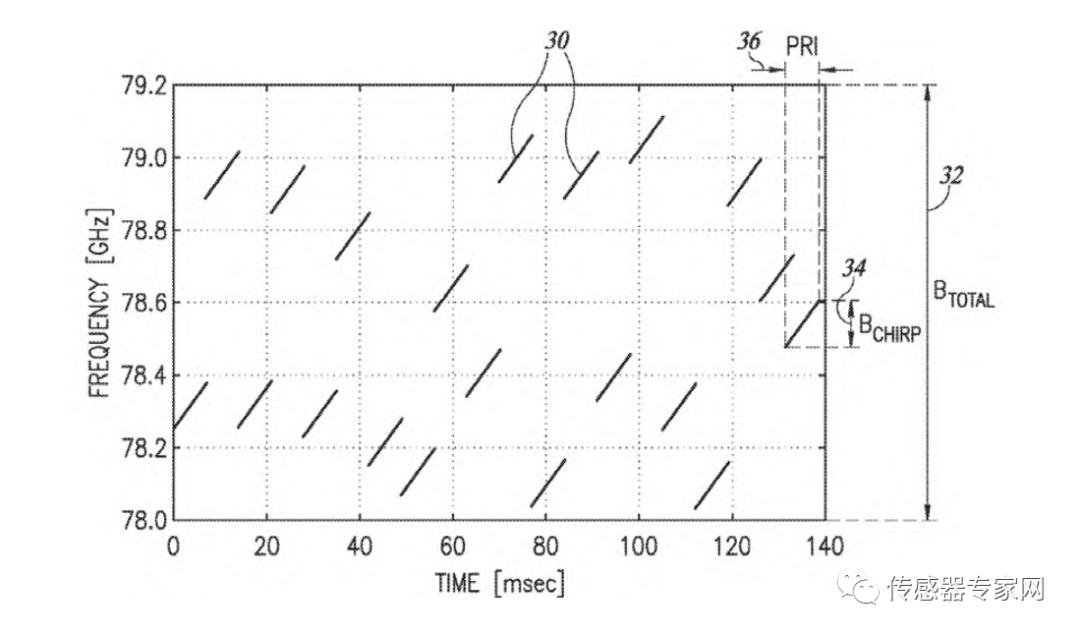
圖7 Arbe專利中的跳頻波形設(shè)計(jì)以消除雷達(dá)之間的干 (4)毫米波雷達(dá)專用處理器問題: 隨著毫米波雷達(dá)系統(tǒng)通道數(shù)的增多,傳統(tǒng)的處理器無法滿足毫米波雷達(dá)系統(tǒng)大吞吐量數(shù)據(jù)的需求,因此迫切需要設(shè)計(jì)符合大陣列大吞吐量的雷達(dá)專用處理器芯片,近年來除了Arbe公司提出了自己的專用處理器方案外,也有像NXP這樣的老牌玩家在設(shè)計(jì)相關(guān)的雷達(dá)專用處理器模塊。
4D毫米波雷達(dá)的深度學(xué)習(xí)初探
4D毫米波雷達(dá)相較于傳統(tǒng)的3D毫米波雷達(dá)有更豐富的信息,如何有效的將深度學(xué)習(xí)框架應(yīng)用到4D毫米波雷達(dá)中是自動(dòng)駕駛性能提升的關(guān)鍵技術(shù)之一。從傳統(tǒng)3D毫米波雷達(dá)的信號(hào)處理流程中我們可以看到,頻信號(hào)經(jīng)過ADC后接入毫米波預(yù)處理流程,經(jīng)過距離和速度2個(gè)維度的FFT之后,進(jìn)行CFAR檢測(cè)在空間維度上剔除大量噪聲,然后利用第3個(gè)維度的FFT來獲取波達(dá)角,生成稀疏點(diǎn)云,繼而進(jìn)行聚類和跟蹤,最后進(jìn)行目標(biāo)分類后輸出。 4D毫米波雷達(dá)增大了天線陣列,除了能增加高度信息外,還能提供更為豐富的點(diǎn)云信息,當(dāng)點(diǎn)云信息足夠豐富時(shí),我們可以借鑒激光雷達(dá)的信號(hào)處理方式,采用類似于Voxelnet、CenterPoint、PointPillar等3D或2D網(wǎng)絡(luò)來進(jìn)行特征提取和識(shí)別。
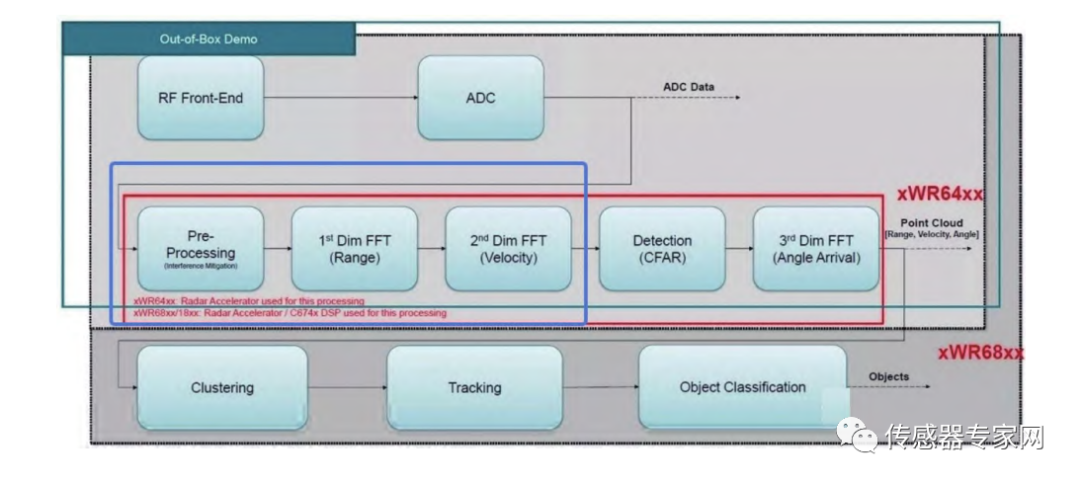
圖8 TI IWR6843雷達(dá)信號(hào)處理框圖 在最新的研究中,也有人提出在進(jìn)行距離和速度2個(gè)維度的FFT之后,不進(jìn)行CFAR步驟,而直接進(jìn)行第3個(gè)維度的FFT來獲取4D張量信息,然后基于這個(gè)4D張量進(jìn)行特征提取和識(shí)別。這種方式可以最大程度地保留有效信息,但是由于沒有進(jìn)行CFAR步驟,需要處理的數(shù)據(jù)量非常大,對(duì)于系統(tǒng)的帶寬和算力都提出了較高的要求。 結(jié) 語總體而言,目前毫米波雷達(dá)系統(tǒng)仍處于百家爭(zhēng)鳴的戰(zhàn)國(guó)時(shí)代,盡管每家公司的雷達(dá)系統(tǒng)方案并不相同,然而都面臨著算法和硬件系統(tǒng)的困境,亟需從算法、芯片和系統(tǒng)層面解決以上問題。 隨著毫米波雷達(dá)系統(tǒng)的發(fā)展,其角度分辨率會(huì)逐漸逼近0.1°,而達(dá)到一些低端激光雷達(dá)的效果。不同于激光雷達(dá)系統(tǒng)直接對(duì)點(diǎn)云數(shù)據(jù)處理的固定方式,4D毫米波雷達(dá)系統(tǒng)自由的陣列和波形設(shè)計(jì)提高了系統(tǒng)的使用門檻,但也給了用戶更多的發(fā)揮空間。而毫米波雷達(dá)系統(tǒng)相比于激光雷達(dá),其波長(zhǎng)更長(zhǎng),具有較為適宜的大氣窗口,在全天候方面更具優(yōu)勢(shì)。FMCW在毫米波雷達(dá)上的成功經(jīng)驗(yàn)已經(jīng)被借鑒到激光雷達(dá)領(lǐng)域,1550 nm FMCW激光雷達(dá)技術(shù)增加了速度維信息,抗干擾能力強(qiáng),但離成熟商用還有一段時(shí)間的路要走。 有關(guān)于毫米波雷達(dá)系統(tǒng)有什么觀點(diǎn),請(qǐng)?jiān)趥鞲衅鲗<揖W(wǎng)公眾號(hào)本內(nèi)容底下留言討論,或在傳感交流圈中進(jìn)行交流。 您對(duì)本文有什么看法?歡迎留言分享! 順手轉(zhuǎn)發(fā)&點(diǎn)擊在看,將中國(guó)傳感產(chǎn)業(yè)動(dòng)態(tài)傳遞給更多人了解!
非常抱歉,由于前兩天小編和小伙伴們都陽了,所以突然停更,今天開始逐步恢復(fù)更新,給您帶來的不便敬請(qǐng)諒解。感謝大家對(duì)傳感器專家網(wǎng)一如既往的關(guān)注,祝愿讀者朋友們沒羊不羊,羊過不再羊,羊中早日脫羊,身體健康,萬事順意
審核編輯黃昊宇
-
激光
+關(guān)注
關(guān)注
19文章
3208瀏覽量
64533 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2940瀏覽量
117602 -
汽車
+關(guān)注
關(guān)注
13文章
3531瀏覽量
37367
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
毫米波雷達(dá)與激光雷達(dá)比較 毫米波雷達(dá)在自動(dòng)駕駛中的作用
什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型

正和微芯發(fā)布4D毫米波雷達(dá)SoC芯片RS6240
恩智浦展示汽車毫米波雷達(dá)最新解決方案
激光雷達(dá)與毫米波雷達(dá)的優(yōu)缺點(diǎn)是什么
激光雷達(dá)VS毫米波雷達(dá),一文讀懂!

除了“上車”,毫米波雷達(dá)還可以有很多選擇

森思泰克全新推出96線激光雷達(dá)和192線激光雷達(dá)產(chǎn)品

4D毫米波雷達(dá)的拆解報(bào)告分享

毫米波雷達(dá)為智慧感知賦能,創(chuàng)新引領(lǐng)園區(qū)發(fā)展新潮流 #毫米波雷達(dá)感知應(yīng)用 #智慧園區(qū) #感知應(yīng)用場(chǎng)景解決方案
毫米波雷達(dá)的作用 毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
經(jīng)緯恒潤(rùn)4D成像毫米波雷達(dá)亮相 CES 2024

4D毫米波成像雷達(dá)的測(cè)試要求都有哪些嗯?

中央域控雷達(dá):4D雷達(dá)新時(shí)代






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論