") 模塊化四足機(jī)器狗、低成本無人機(jī)
模塊化四足機(jī)器狗、低成本無人機(jī)
模塊化四足機(jī)器人
用Fusion 360設(shè)計(jì)
在Teensy 3.5和Arduino上用Arduino語言編碼
模塊化結(jié)構(gòu)(激光雷達(dá)、無人機(jī)、氣體檢測)
自主功能 (避開障礙物,保持平衡,壓力控制)
PI(比例-積分)控制
應(yīng)用逆向運(yùn)動(dòng)學(xué)和運(yùn)動(dòng)學(xué)公式
感知能力:激光雷達(dá)、氣體檢測、壓力傳感器、陀螺儀、GPS、Wi-Fi連接、攝像頭

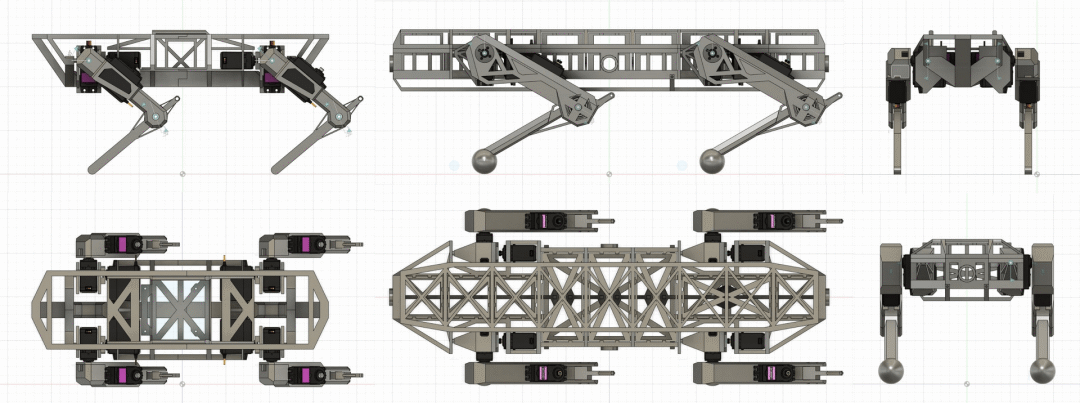
作者做的是一個(gè)完全由可替換模塊組成的四足機(jī)器狗。這種模塊化的方法使機(jī)器人可以比傳統(tǒng)的機(jī)器人有更好的適應(yīng)性,隨著新模塊的引入,該機(jī)器人平臺的能力可以得到極大的增強(qiáng)。
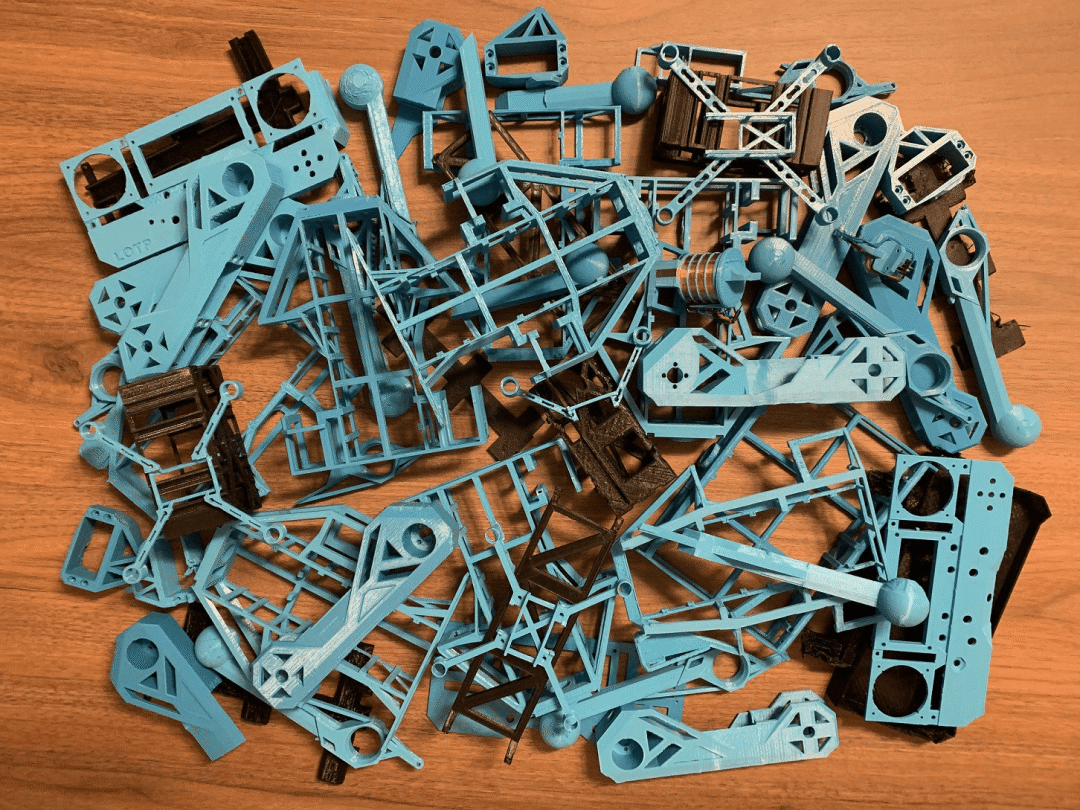
該平臺在默認(rèn)配置下由六個(gè)不同的單元組成。核心是一個(gè)計(jì)算單元,負(fù)責(zé)收集輸入,進(jìn)行計(jì)算,并輸出動(dòng)作。由于Teensy 3.5的速度快,而且有大量的RAM/閃存,所以采用了它。此外,該單元還有一個(gè)Wi-Fi模塊、一個(gè)GPS模塊和一個(gè)用于定位數(shù)據(jù)的陀螺儀。主電池單元和備用電池單元用一對鋰電池組為機(jī)器人提供電源,一個(gè)穩(wěn)壓器單元將電壓降低到6V,用于舵機(jī),3.3V/5V用于電子設(shè)備。最后,定位在腿部的壓力傳感器在壓力下可以調(diào)整身體。
還有一個(gè)攝像頭可以將實(shí)時(shí)視頻發(fā)送到遠(yuǎn)程控制器上。
來源:https://hackaday.io/project/188660-lotp-robot-dog-v2
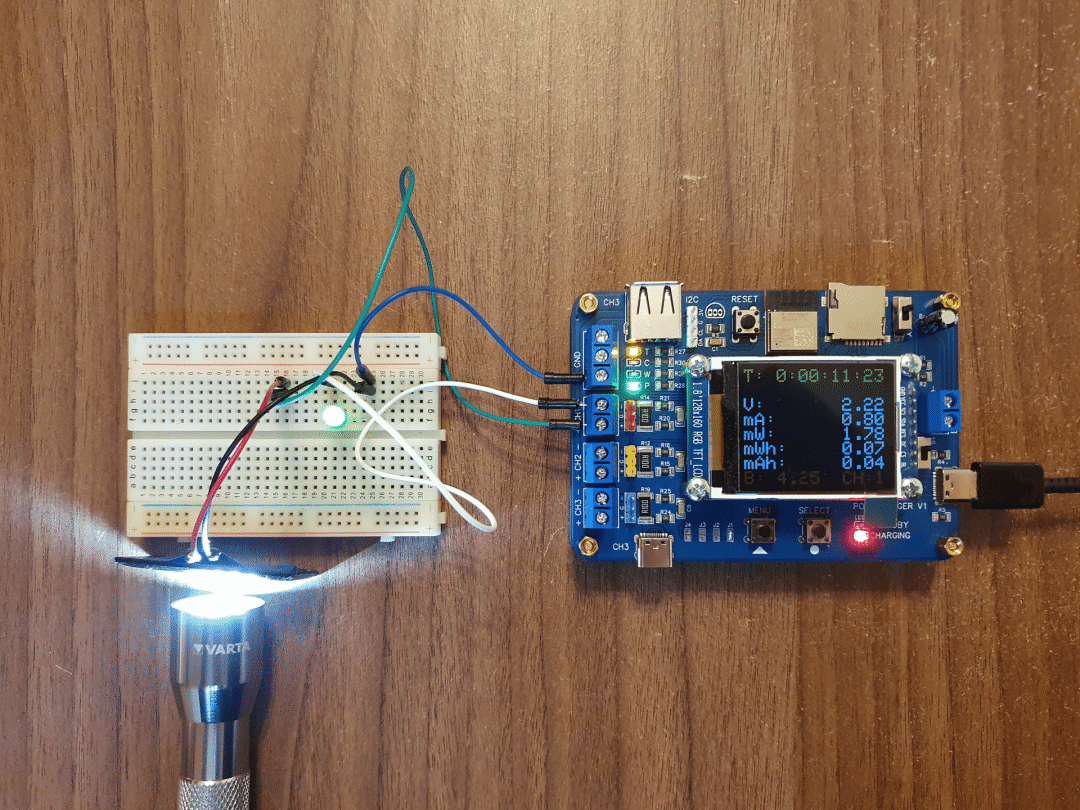
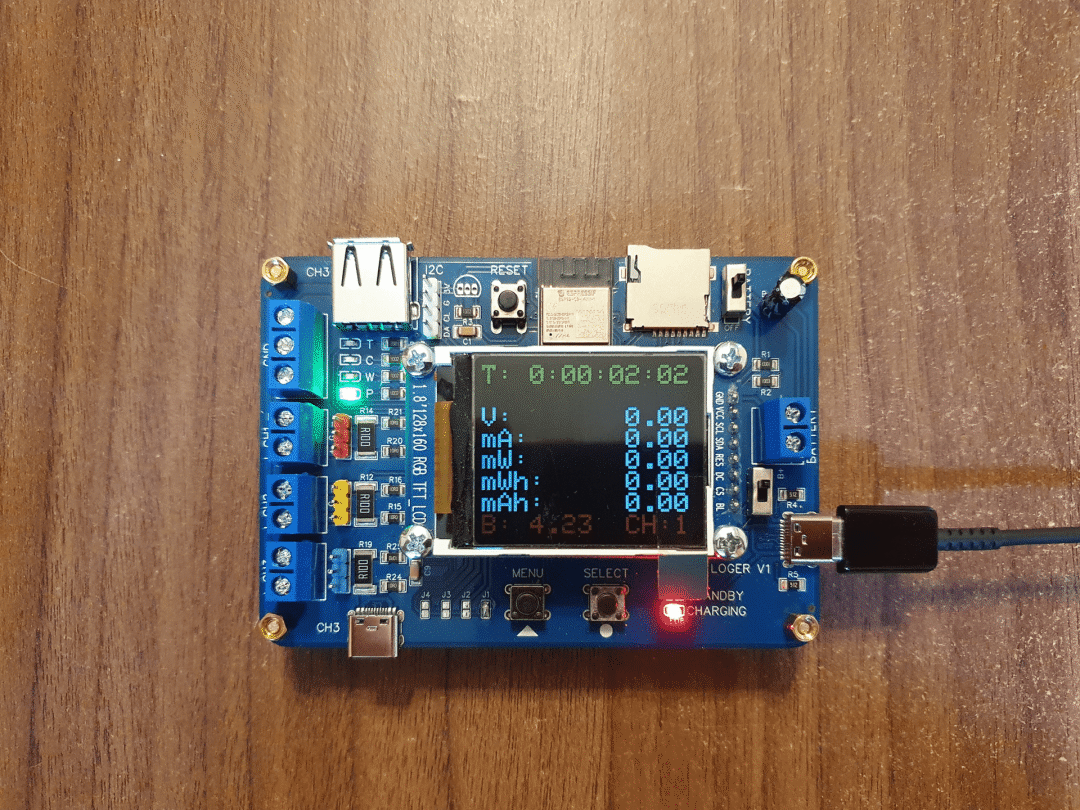
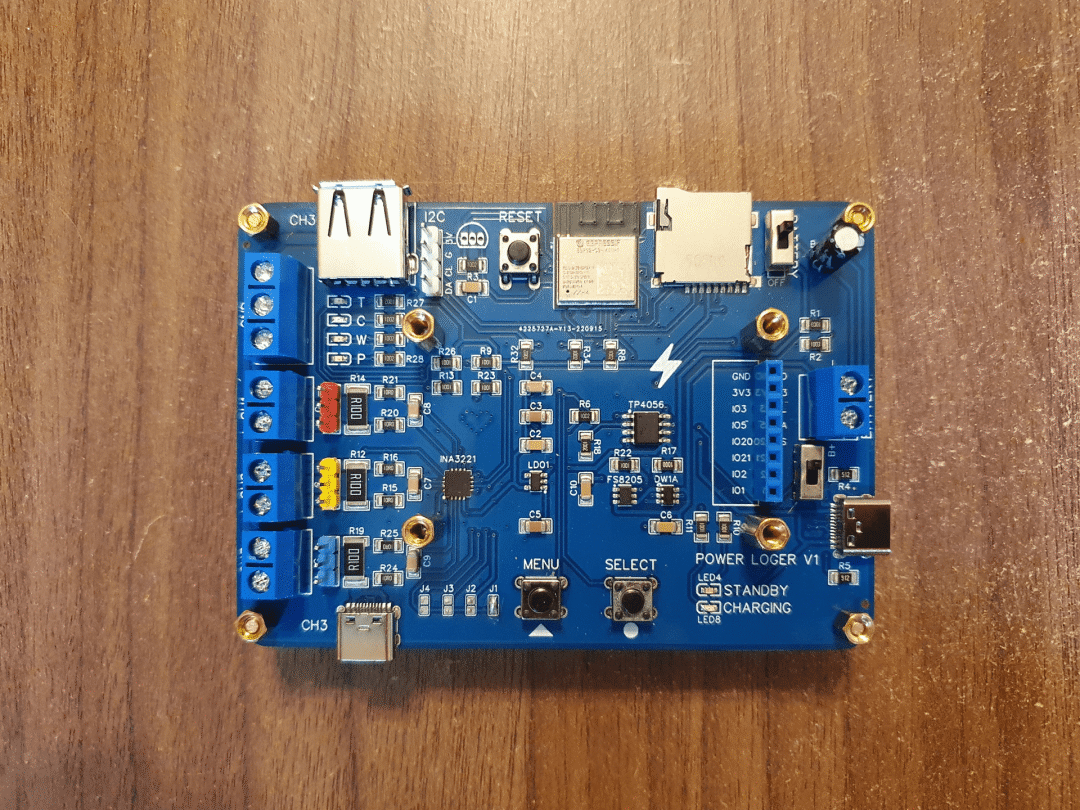
一個(gè)基于INA3221芯片的電源記錄器,支持TFT顯示、SD卡和電池(充電和監(jiān)測)。
在一個(gè)電池或太陽能供電的項(xiàng)目中,我們往往需要知道到底跑了多少電流。
最簡單的測量方法是使用INA219或INA3221模塊,這些模塊可以很便宜地找到。不過,這些模塊有缺陷,往往需要修改才能按預(yù)期工作。
所以作者設(shè)計(jì)了這款功率記錄器,它的功能很多,非常有意思,而且制作也相對容易。
來源:https://hackaday.io/project/187504-esp32-3-channel-power-logger
低成本無人機(jī)
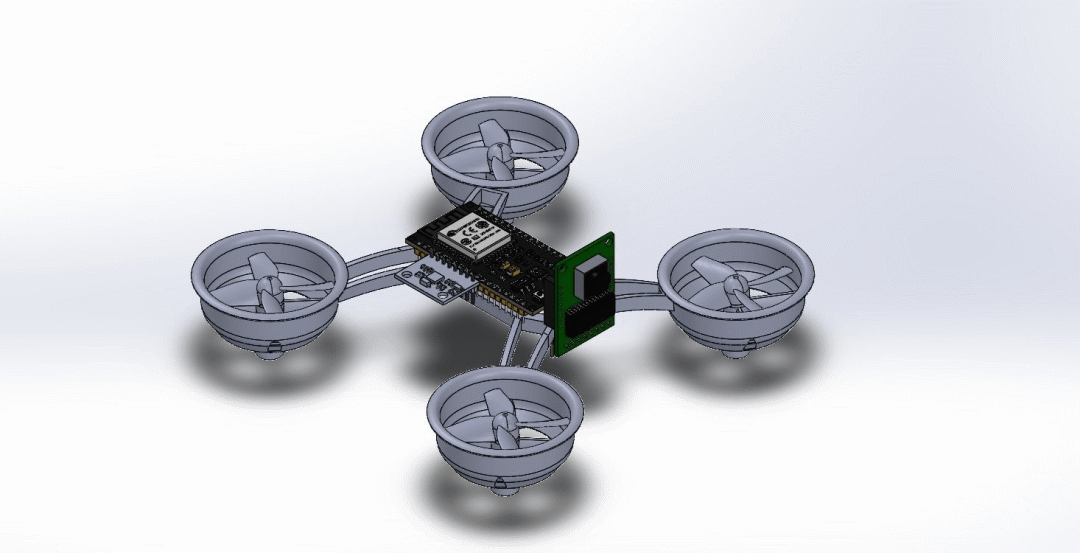
這個(gè)項(xiàng)目使用ESP-WROOM-32作為主飛行控制器,利用它的WIFI功能進(jìn)行通信和控制,用GPIO運(yùn)行直流電動(dòng)機(jī),用SPI和I2C運(yùn)行ArduCAM mini 2mp plus相機(jī),還有3軸陀螺儀MPU6050。
材料清單:
1 x ESP-WROOM-32 DEVKIT 1
1 x ArduCAM mini 2mp plus
1 x MPU6050
4個(gè)Crazepony 6x15mm馬達(dá)
4個(gè)P溝道MOSFET SMD 晶體管 AO3401A
控制器方面,作者打算用軟件來控制無人機(jī)。
使用rawdrawandroid,讓安卓手機(jī)/平板電腦可以連接到ESP并控制無人機(jī)。
來源:https://hackaday.io/project/188578-esp32-drone
WiFi遙控器
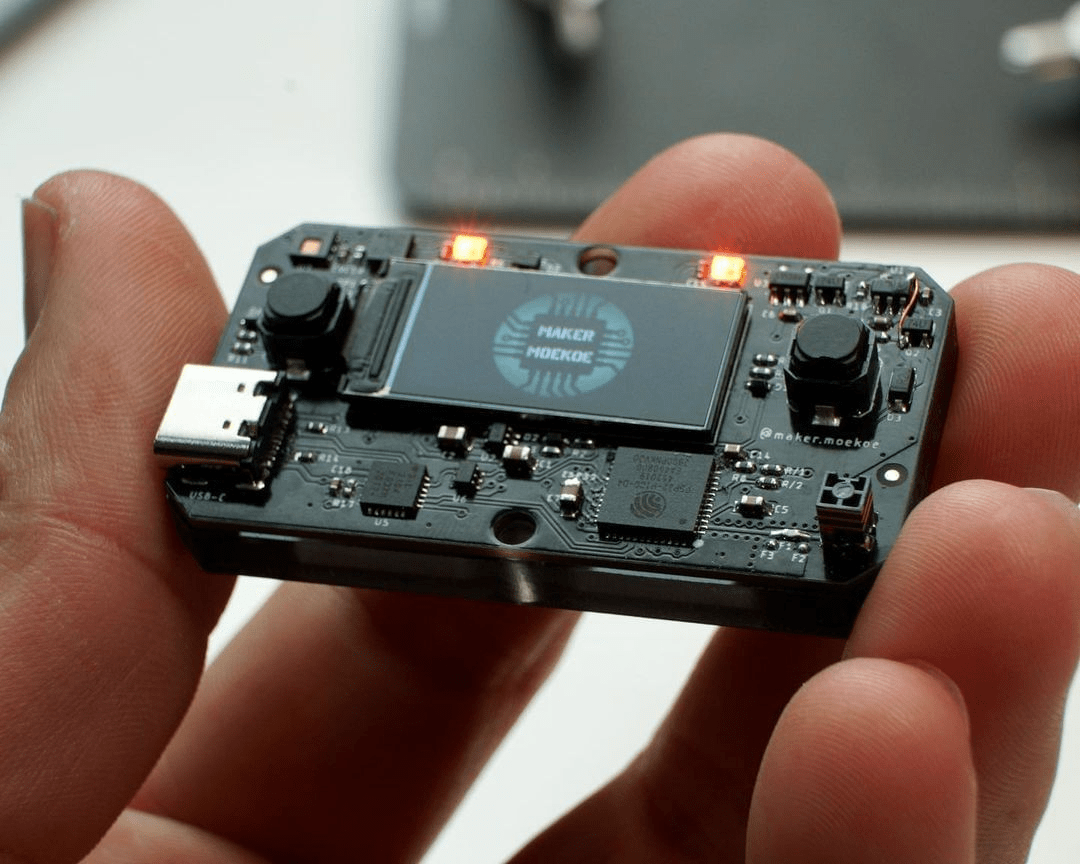
一個(gè)基于ESP32 Pico D4和一個(gè)小型TFT顯示器的WiFi遙控器。它可以用來控制各種東西,作者用它來演示播放GIF圖片。
審核編輯 :李倩
-
模塊化
+關(guān)注
關(guān)注
0文章
331瀏覽量
21343 -
無人機(jī)
+關(guān)注
關(guān)注
229文章
10420瀏覽量
180133 -
機(jī)器狗
+關(guān)注
關(guān)注
3文章
171瀏覽量
10120
原文標(biāo)題:項(xiàng)目精選:模塊化四足機(jī)器狗、低成本無人機(jī)
文章出處:【微信號:All_best_xiaolong,微信公眾號:大魚機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
無人機(jī)干擾模塊:守護(hù)空域安全的創(chuàng)新科技|特信無人機(jī)反制
特信無人機(jī)功放模塊:推動(dòng)無人機(jī)通信性能躍升的關(guān)鍵技術(shù)
開源項(xiàng)目!用ESP8266 DIY會(huì)爬墻的無人機(jī)
無人機(jī)智能巡檢系統(tǒng)
為什么四足機(jī)器人設(shè)計(jì)常借鑒狗的外形特征?
第四集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的組成與工作原理
第三集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的應(yīng)用領(lǐng)域
第二集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的發(fā)展歷程
第一集 知語科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的定義與分類
知語云智能科技揭秘:無人機(jī)威脅如何破解?國家安全新防線!
知語云智能科技無人機(jī)防御系統(tǒng):應(yīng)對新興威脅的先鋒力量
無人機(jī)全景監(jiān)測:空域管理的新革命
震撼發(fā)布!知語云智能科技引領(lǐng)革新,全景反制無人機(jī)系統(tǒng)破繭而出!
四旋翼無人機(jī)飛行原理【其利天下無人機(jī)方案開發(fā)】






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論