") 代爾夫特?cái)?shù)據(jù)集(VOD),4D雷達(dá)、激光雷達(dá)和相機(jī)數(shù)據(jù)
代爾夫特?cái)?shù)據(jù)集(VOD),4D雷達(dá)、激光雷達(dá)和相機(jī)數(shù)據(jù)
1、介紹
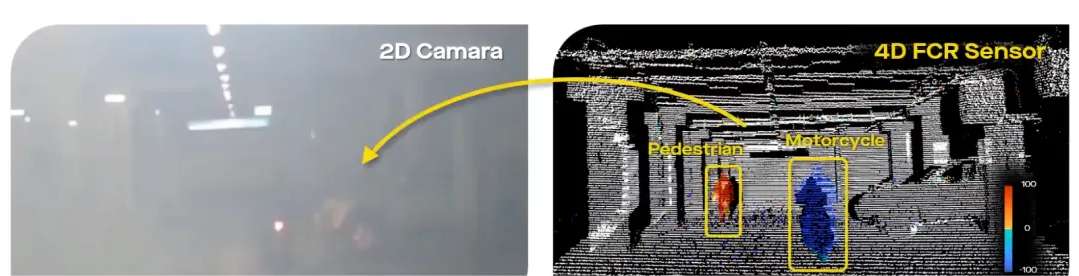
代爾夫特視圖 (VoD) 數(shù)據(jù)集是一種新穎的汽車數(shù)據(jù)集,包含 8600 幀同步和校準(zhǔn)的 64 層 LiDAR、(立體)攝像頭和 3+1D 雷達(dá)數(shù)據(jù),這些數(shù)據(jù)是在復(fù)雜的城市交通中采集的。它由超過 123000 個 3D 邊界框注釋組成,包括超過 26000 個行人、10000 個騎自行車者和 26000 個汽車標(biāo)簽。
2、傳感器和數(shù)據(jù)?
數(shù)據(jù)集記錄了以下傳感器的輸出:
安裝在前保險(xiǎn)杠后面的采埃孚 FRGen21 3+1D 雷達(dá) (~13 Hz),
安裝在擋風(fēng)玻璃上的立體攝像頭(1936 × 1216 像素,~30 Hz),
屋頂上的Velodyne HDL-64 S3激光雷達(dá)(~10 Hz)掃描儀,以及
自我車輛的里程計(jì)(RTK GPS、IMU 和車輪里程計(jì)的過濾組合,~100 Hz)。
所有傳感器均經(jīng)過聯(lián)合校準(zhǔn),有關(guān)傳感器設(shè)置的一般概述,請參見下圖。

該數(shù)據(jù)集僅免費(fèi)提供用于非商業(yè)研究目的,使用該數(shù)據(jù)集的資格僅限于碩士生和博士生,以及學(xué)術(shù)和非營利研究機(jī)構(gòu)的工作人員,可以通過填寫此表格來請求訪問:
https://docs.google.com/forms/d/e/1FAIpQLSdKvkuKbzmJTn8raJBAWgekAJCpaQLS_ED63sUS89Ezo61RCQ/viewform?usp=send_form
如果不想填寫表格,文章末尾提供了下載方式。
Github中包含了數(shù)據(jù)解析的Python代碼,以及相關(guān)的教程:https://github.com/tudelft-iv/view-of-delft-dataset。
注意事項(xiàng):該數(shù)據(jù)集比較大,大約14G,下載比較耗時間。
3、數(shù)據(jù)格式
激光雷達(dá):
激光雷達(dá)點(diǎn)云存儲在Bin文件中,每個 bin 文件都包含 Nx4 數(shù)組形式的 360° 掃描,其中 N 是點(diǎn)數(shù),4 是特征數(shù):[x,y,z,reflectance]
4D毫米波雷達(dá):
雷達(dá)點(diǎn)云存儲在Bin文件中,每個 bin 文件都包含一組 Nx7 數(shù)組形式的點(diǎn),其中 N 是點(diǎn)數(shù),7 是特征數(shù):
[x, y, z, RCS, v_r, v_r_compensated, time]
其中,v_r是相對徑向速度,v_r_compensated是點(diǎn)的絕對(即自我運(yùn)動補(bǔ)償)徑向速度。time是點(diǎn)的時間 ID,指示它來自哪個掃描。例如,當(dāng)前掃描的點(diǎn) t = 0, 而第三次最近掃描的點(diǎn)的 t = ?2。
相機(jī):圖像存儲在.jpg文件中。
4、數(shù)據(jù)讀取與解析
參照說明文檔的Pyhton代碼即可完成讀取,其中代碼需要Python的環(huán)境,并安裝好相關(guān)的依賴庫。
https://github.com/tudelft-iv/view-of-delft dataset/blob/main/1_frame_information.ipynb
該數(shù)據(jù)集調(diào)皮哥已經(jīng)解析出來了,解析過程不難,挺簡單的。數(shù)據(jù)內(nèi)容覺得還可以,就是單幀的點(diǎn)云有點(diǎn)少。感興趣的朋友可以試試,用于科研(做聚類、跟蹤算法、目標(biāo)識別、數(shù)據(jù)融合)還是可以的,算是目前比較好的數(shù)據(jù)集了。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2552文章
51237瀏覽量
754789 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3991瀏覽量
190081 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1208瀏覽量
24740
原文標(biāo)題:雷達(dá)開源數(shù)據(jù)集 | 代爾夫特?cái)?shù)據(jù)集(VOD),4D雷達(dá)、激光雷達(dá)和相機(jī)數(shù)據(jù)
文章出處:【微信號:ZGDZGCS,微信公眾號:電子萬花筒】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
激光雷達(dá)技術(shù)或可助力防御無人機(jī)
激光雷達(dá)在SLAM算法中的應(yīng)用綜述

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
如何提升激光雷達(dá)數(shù)據(jù)的精度
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
引爆行業(yè)熱潮,飛芯電子相干4D FMCW無人機(jī)偵測激光雷達(dá)震撼發(fā)布!
洛微科技FMCW 4D激光雷達(dá)榮獲“科技先鋒獎”
基于FPGA的激光雷達(dá)控制板

4D毫米波雷達(dá)的拆解報(bào)告分享
大陸集團(tuán)的3D Flash激光雷達(dá)有何優(yōu)勢?

亮道智能:發(fā)布全新一代激光雷達(dá),未來主攻固態(tài)激光雷達(dá)低價(jià)市場
中央域控雷達(dá):4D雷達(dá)新時代






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論