 在系統重新啟動期間禁用看門狗計時器
在系統重新啟動期間禁用看門狗計時器
在大多數微處理器應用中,看門狗監控器(如MAX6369)用于監測系統活動,可能需要在系統重啟期間禁用看門狗。當軟件啟動時間超過監視器超時期限時尤其如此。本應用筆記描述了一種電路,可用于選擇性禁用看門狗定時器
介紹
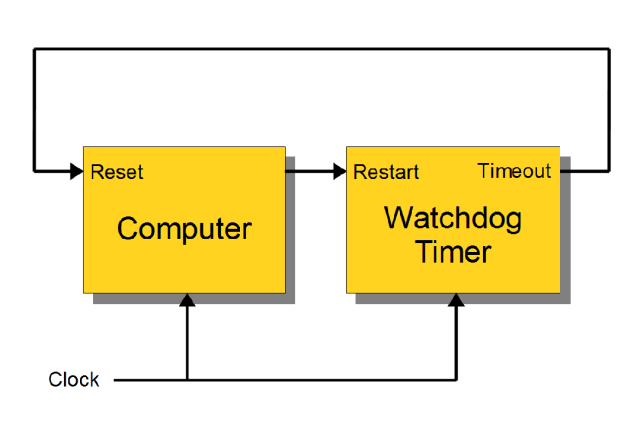
看門狗定時器是現代嵌入式系統的基本組成部分。看門狗定時器持續監視代碼的執行,如果軟件掛起或不再執行正確的代碼序列,則重置系統。
微控制器單元 (MCU) 在通電時啟動啟動過程,這可能需要幾毫秒到幾秒鐘的時間。微控制器在啟動過程中執行系統初始化和其他內務管理活動。MCU在運行啟動序列時,預計監控MCU的外部看門狗定時器不會出現任何中斷或RESET信號。這是看門狗定時器上電或啟動延遲較長的主要原因。
在啟動過程長于監視器超時期限的應用程序中,監視程序計時器在啟動完成之前一直斷言監視器輸出 (WDO)。這會造成死鎖,MCU 將永遠掛起。
本應用筆記解釋了MAX6369–MAX6374系列如何消除這種死鎖。
應用電路及說明
MAX6369–MAX6374是一系列引腳可選的看門狗定時器,用于監控MCU活動,并在MCU陷入環路或無法執行代碼時發出信號。微處理器必須在正常操作期間重復切換看門狗輸入 (WDI),然后才能在選定的看門狗超時期限過去之前,以證明系統正在正確處理代碼。如果MCU在超時期限到期前未提供有效的看門狗輸入轉換,則MAX6369–MAX6374將觸發看門狗輸出(WDO)。看門狗輸出脈沖可用于復位MCU或中斷系統以警告任何處理錯誤。表1給出了MAX6369–MAX6374的SET引腳配置提供的不同時序選項。
表 1.最小超時設置
| 邏輯輸入 | MAX6369/MAX6370 | MAX6371/MAX6372 | MAX6373/MAX6374 | |||
|---|---|---|---|---|---|---|
| SET2 | 座1 | 座0 | t延遲- U白矮星 | t延遲= 60s, t白矮星 | t延遲 | t白矮星 |
| 0 | 0 | 0 | 1毫秒 | 1毫秒 | 3毫秒 | 3毫秒 |
| 0 | 0 | 1 | 10毫秒 | 3毫秒 | 3秒 | 3秒 |
| 0 | 1 | 0 | 10/秒 | 10毫秒 | 401 | 1秒 |
| 0 | 1 | 1 | 禁用 | 禁用 | 禁用 | 禁用 |
| 1 | 0 | 0 | 100毫秒 | 100毫秒 | 200微秒 | 30微秒 |
| 1 | 0 | 1 | 1秒 | 300毫秒 | 第一邊緣 | 1秒 |
| 1 | 1 | 0 | 301 | 3秒 | 第一邊緣 | 301 |
| 1 | 1 | 1 | 401 | 401 | 401 | 301 |
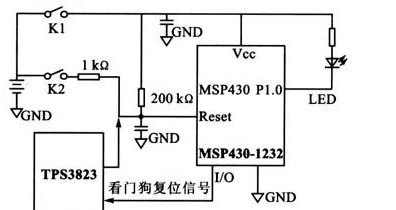
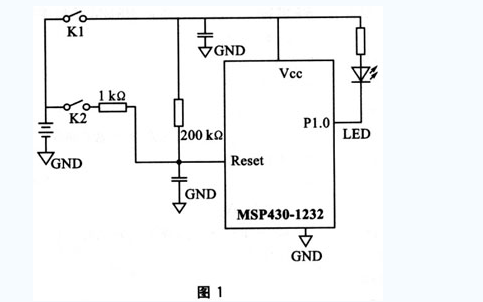
圖1是MAX6369與MCU接口的應用圖。
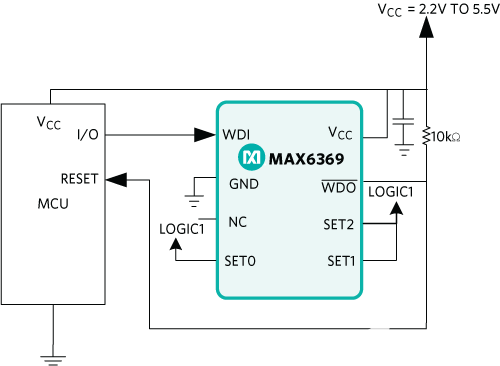
圖1.MAX6369的應用框圖
優點和特點
適用于關鍵μP應用的精密看門狗定時器
引腳可選的看門狗超時周期
引腳可選的看門狗啟動延遲周期
能夠在不進行電源循環的情況下更改看門狗時序特性
漏極開路或推挽脈沖/看門狗輸出
看門狗定時器禁用功能
工作電壓:+2.5V至+5.5V
8μA 的低電源電流
無需外部元件
微型 8 引腳 SOT23 封裝
圖2是MAX6369–MAX6374的時序圖。MCU 在設備上電后開始啟動。MAX6369忽略任何WDI違規行為。設置+ 噸延遲,這比啟動過程更長。在啟動過程之后,MCU 開始在白矮星時間到期。
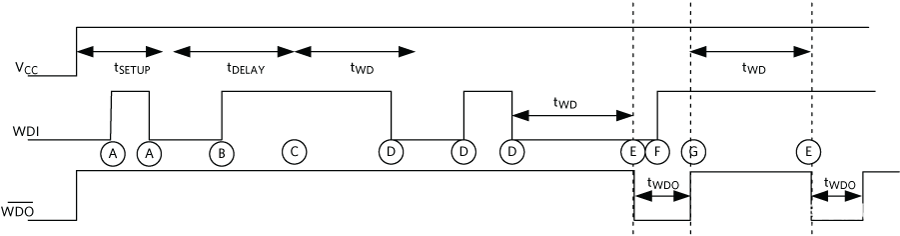
圖2.MAX6369的時序圖
以下是操作期間的不同關鍵計時實例:
在設置延遲期間忽略 WDI 上的轉換。
在啟動延遲期間忽略 WDI 上的轉換。
看門狗定時器在啟動延遲后啟動,WDO取消斷言。
轉換發生在看門狗超時期限 (t白矮星).
看門狗定時器清除并再次啟動定時器。看門狗超時 ( > t白矮星)和WDO斷言。
WDI 上的轉換在 WDO 斷言時被忽略。
看門狗定時器在 WDO 取消斷言后啟動。
系統重新啟動期間的死鎖情況
MAX6369-MAX6374在啟動過程完成后開始監測MCU活動。如果 MCU 無法在白矮星時間到期(圖2)。看門狗故障會重新啟動 MCU。如果系統重啟時間超過tWD,MAX6369在重啟過程結束前反復切換WDO。這會永遠掛起 MCU。圖 3 顯示了類似的死鎖情況。
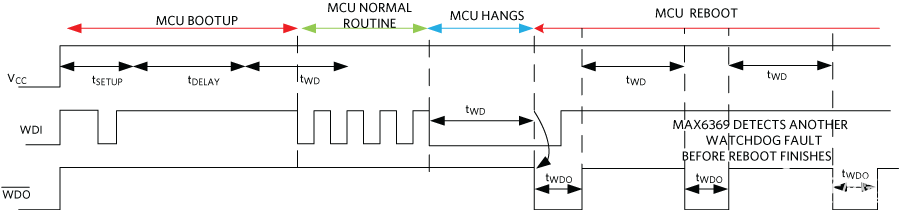
圖3.MCU 中的死鎖情況。
圖 3 中的死鎖問題通過提供額外的設置延遲 (t延遲)到MAX6369–MAX6374,每次檢測到看門狗故障時。
MAX6369–MAX6374提供3組引腳,以實現所需的性能。MAX6369–MAX6374允許用戶動態改變定時設置。如果在斷言 WDO 后更改了設置引腳配置,則允許完成先前的設置。新設置的特性在WDO解除置位后假設,MAX6369–MAX6374進入新的啟動階段。圖4是MAX6369–MAX6374的時序圖,其中設定引腳配置在WDO置位后發生變化。
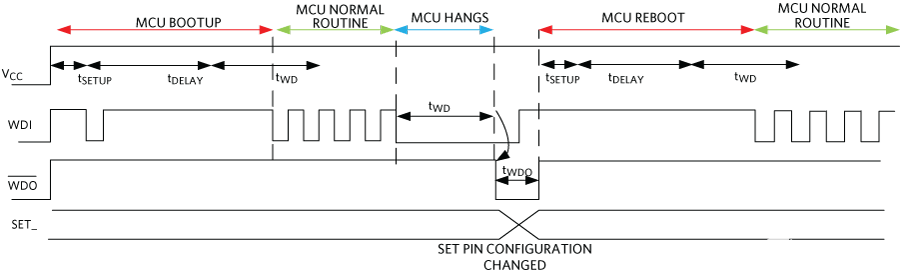
WDO 被置言“ alt=”在斷言 WDO 時更改 SET 引腳配置“>圖 4.在置位 WDO 時更改 SET 引腳配置。
圖5顯示了用于獲取圖4中時序圖的應用電路圖。SET1邏輯引腳連接到以下原理圖中的WDO引腳。
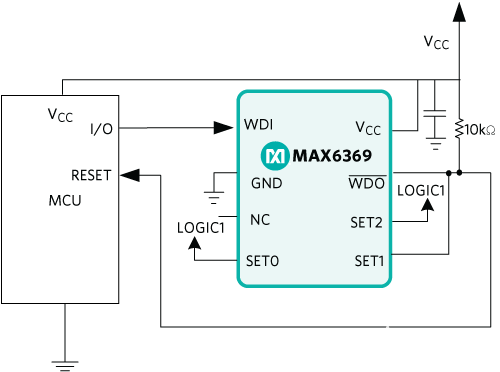
圖5.在重新啟動期間禁用看門狗計時器的應用程序電路。
上電后MAX6396的初始設置為SET0 = 1、SET1 = 1和SET2 = 1。這將設置 t延遲和 t白矮星到60年代。如果MAX6369檢測到看門狗故障。WDO斷言并將SET引腳設置更改為SET0 = 1、SET1 = 0和SET2 = 1。此設置僅持續 t世界發展組織(100ms)。WDO 取消置位,SET 引腳配置更改為其初始設置 SET0 = 1、SET1 = 1 和 SET2 = 1。SET引腳中的轉換啟動了新的建立階段,其中包括設置- U延遲和 t白矮星.MAX6369在新電路布置下,在MCU重啟期間不會發生任何看門狗故障。看門狗故障后,系統正常重新啟動。僅當至少選擇一個SET引腳作為邏輯1時,此解決方案才有效。如果所有SET引腳均為邏輯0,則SET引腳無法連接到WDO輸出。
圖6所示為MAX6369,電路連接如圖1所示,其中SET0 = V抄送(邏輯 1),SET1 = V抄送(邏輯 1),SET2 = V抄送(邏輯 1)。《世界發展指標》與 V 相連抄送觀察MAX6369看門狗故障。設備等待設置- U延遲和 t白矮星以在上電后置位WDO脈沖。它在 t 之后不斷切換 WDO 脈沖白矮星.
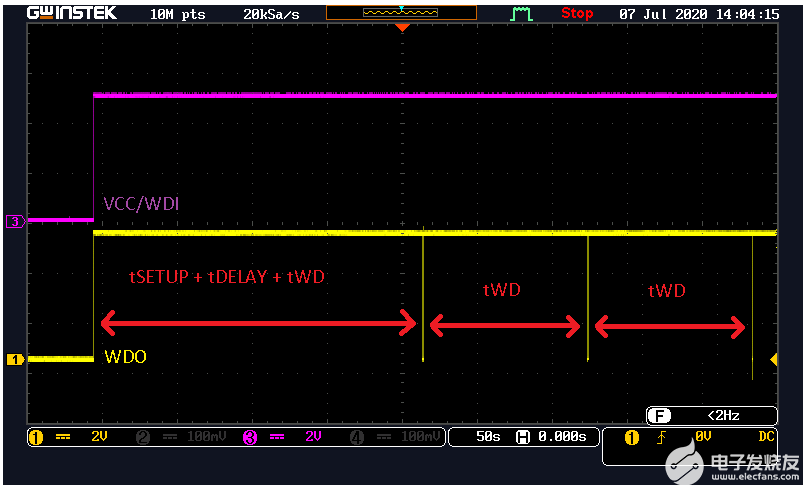
圖6.MAX6369 with SET0 = V抄送, SET1 = V抄送,且 SET2 = V抄送.
圖7所示為MAX6369,電路連接如圖5所示,其中SET0 = VCC (邏輯1),SET1 = WDO,SET2 = VCC (邏輯1)。每當MAX6369檢測到看門狗故障時,器件都會啟動新的啟動階段。
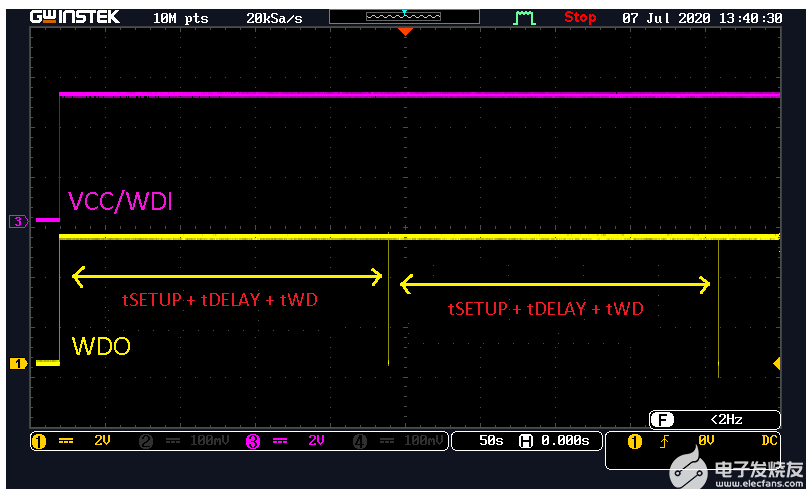
WDO,SET2 = VCC“>圖7.MAX6969 with SET0 = V抄送、SET1 = WDO,SET2 = V抄送
總結
MAX6369–MAX6374系列看門狗定時器IC可以監測MCU的時序錯誤行為,解決嵌入式系統中常見的死鎖問題,無需額外的分立元件。
審核編輯:郭婷
-
mcu
+關注
關注
146文章
17123瀏覽量
350992 -
微處理器
+關注
關注
11文章
2258瀏覽量
82403 -
定時器
+關注
關注
23文章
3246瀏覽量
114720
發布評論請先 登錄
相關推薦
看門狗基礎知識
轉:STM32CubeMX系列教程15:看門狗(WDG)
用看門狗定時器改進 IoT 系統的穩健性
HT49 MCU中看門狗計時器的設定

如何實現模擬看門狗?

為何看門狗定時器對IoT至關重要
具有看門狗功能的TPL5010納瓦級功耗系統計時器數據表






 工商網監
工商網監
評論