

研究點云數據時,感覺無從下手?
看看這十大點云數據處理技術和點云應用匯總,換個思路學習了解點云。
點云 · 定義
簡言之,在獲取物體表面每個采樣點的空間坐標后,得到的是一個點的集合,稱之為“點云”。包括三維坐標(XYZ)、激光反射強度(Intensity)和顏色信息(RGB)。
點云·數據處理技術
目前,點云處理涉及的技術主要為以下十個:
點云濾波(數據預處理)
點云關鍵點
特征和特征描述
點云配準
點云分割與分類
SLAM圖優化
目標識別檢索
變化檢測
三維重建
點云數據管理
1
點云濾波(數據預處理)
點云濾波,顧名思義,即濾掉噪聲。原始采集的點云數據往往包含大量散列點、孤立點,下圖為濾波前后的點云效果對比。
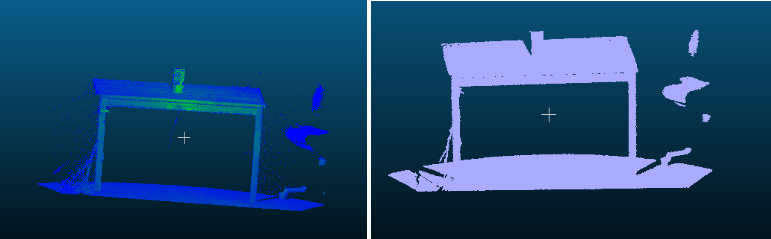
點云濾波的主要方法有:雙邊濾波、高斯濾波、條件濾波、直通濾波、隨機采樣一致濾波、VoxelGrid濾波等,這些算法都被封裝在了PCL點云庫中。
2
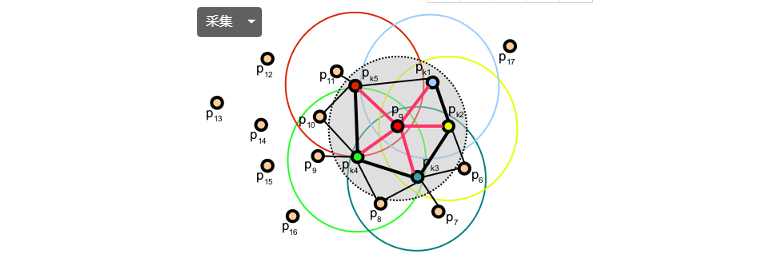
點云關鍵點
在二維圖像上,有Harris、SIFT、SURF、KAZE這樣的關鍵點提取算法,這種特征點的思想可以推廣到三維空間。從技術上來說,關鍵點的數量相比于原始點云或圖像的數據量減小很多,與局部特征描述子結合在一起,組成關鍵點描述子常用來形成原始數據的表示,而且不失代表性和描述性,從而加快了后續的識別,追蹤等對數據的處理速度,故而,關鍵點技術成為在2D和3D 信息處理中非常關鍵的技術。
常見的三維點云關鍵點提取算法有一下幾種:ISS3D、Harris3D、NARF、SIFT3D, 這些算法在PCL庫中都有實現,其中NARF算法是比較常見的。
3
特征和特征描述
如果要對一個三維點云進行描述,光有點云的位置是不夠的,常常需要計算一些額外的參數,比如法線方向、曲率、文理特征等等。如同圖像的特征一樣,我們需要使用類似的方式來描述三維點云的特征。
常用的特征描述算法有:法線和曲率計算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image等。
PFH:點特征直方圖描述子; FPFH:跨蘇點特征直方圖描述子,FPFH是PFH的簡化形式。
4
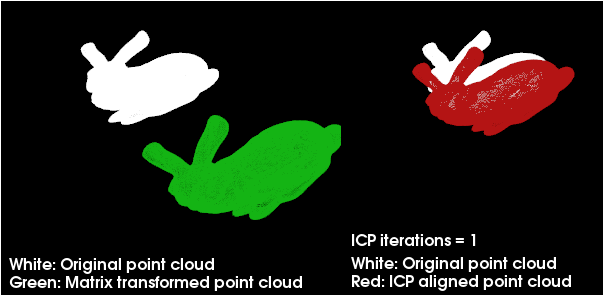
點云配準
點云配準的概念類比于二維圖像中的配準,只不過二維圖像配準獲取得到的是x,y,alpha,beta等放射變化參數,二三維點云配準可以模擬三維點云的移動和對齊,也就是會獲得一個旋轉矩陣和一個平移向量,通常表達為一個4×3的矩陣,其中3×3是旋轉矩陣,1*3是平移向量。嚴格說來是6個參數,因為旋轉矩陣也可以通過羅格里德斯變換轉變成1*3的旋轉向量。
常用的點云配準算法有兩種:正太分布變換和著名的ICP點云配準,此外還有許多其它算法,列舉如下:
ICP:穩健ICP、point to plane ICP、point to line ICP、MBICP、GICP
NDT 3D、Multil-Layer NDT
FPCS、KFPSC、SAC-IA
Line Segment Matching、ICL
5
點云分割與分類
點云分割又分為區域提取、線面提取、語義分割與聚類等。一般說來,點云分割是目標識別的基礎。
分割:區域聲場、Ransac線面提取、NDT-RANSAC、K-Means、Normalize Cut、3D Hough Transform(線面提取)、連通分析
分類:基于點的分類,基于分割的分類,監督分類與非監督分類
6
SLAM圖優化
SLAM技術中,在圖像前端主要獲取點云數據,而在后端優化主要就是依靠圖優化工具。而SLAM技術近年來的發展也已經改變了這種技術策略。在過去的經典策略中,為了求解LandMark和Location,將它轉化為一個稀疏圖的優化,常常使用g2o工具來進行圖優化。 下面是一些常用的工具和方法:
g2o、LUM、ELCH、Toro、SPA
SLAM方法:ICP、MBICP、IDC、likehood Field、 Cross Correlation、NDT
7
目標識別檢索
這是點云數據處理中一個偏應用層面的問題,簡單說來就是Hausdorff距離常被用來進行深度圖的目標識別和檢索,現在很多三維人臉識別都是采用這種技術。
8
變化檢測
當無序點云在連續變化中,八叉樹算法常常被用于檢測變化,這種算法需要和關鍵點提取技術結合起來,八叉樹算法也算是經典中的經典了。
9
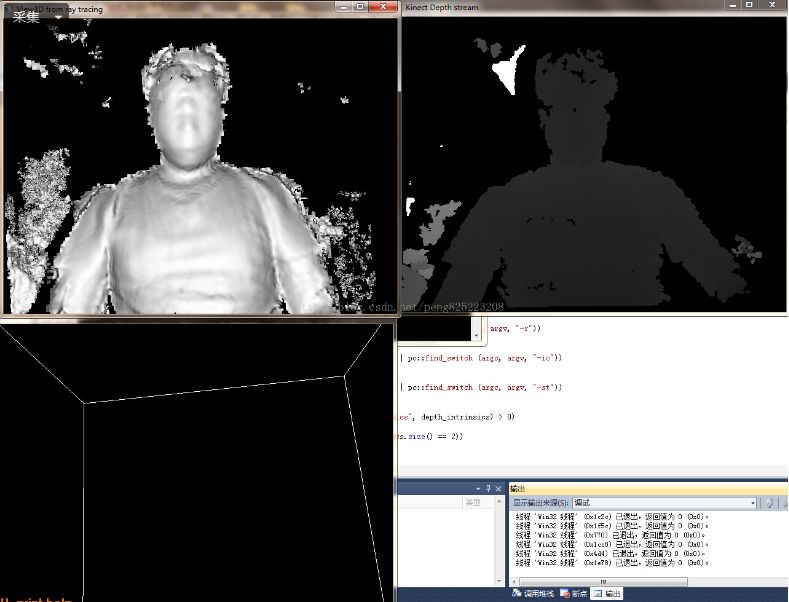
三維重建
我們獲取到的點云數據都是一個個孤立的點,如何從一個個孤立的點得到整個曲面呢,這就是三維重建。
在玩kinectFusion時候,如果我們不懂,會發現曲面漸漸變平緩,這就是重建算法不斷迭代的效果。我們采集到的點云是充滿噪聲和孤立點的,三維重建算法為了重構出曲面,常常要應對這種噪聲,獲得看上去很舒服的曲面。
常用的三維重建算法和技術有:
泊松重建、Delauary triangulatoins
表面重建,人體重建,建筑物重建,輸入重建
實時重建:重建紙杯或者龍作物4D生長臺式,人體姿勢識別,表情識別
10
點云數據管理
主要包含以下幾方面:點云壓縮,點云索引(KDtree、Octree),點云LOD(金字塔),海量點云的渲染。
點云 · 應用
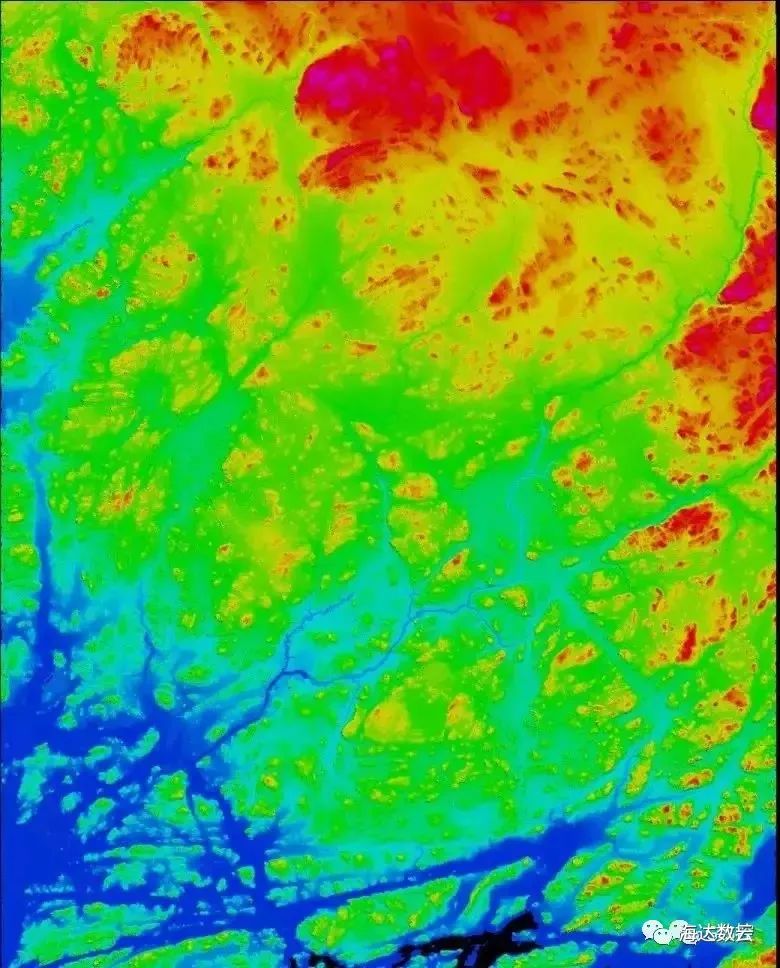
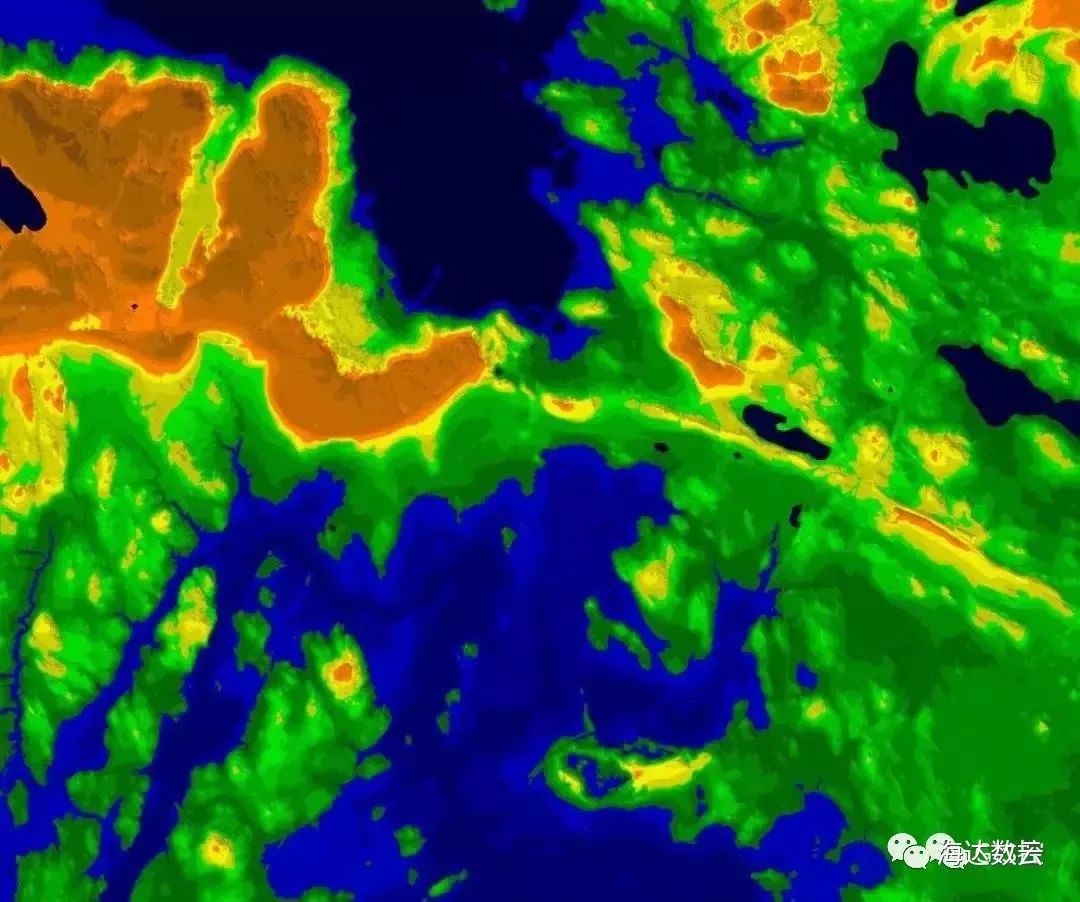
數字高程模型及等高線
利用獲取的激光點云,通過去除部分噪聲點并進行柵格化,可以快速生成高質量的數字表面模型(DSM).同時,如利用自動化方法結合人工編輯對激光點云進行進一步的濾波操作,濾除其中的非地面點并進行柵格化,可以得到高質量的數字地形模(DEM)。
等高線生產
等高線是在地圖上描繪高程差異的傳統且熟悉的方式。LiDAR產生一個點云,代表地面和上面的物體。首先要在美觀程度上改變人們對等高線的看法,因為LiDAR 點云數據精度較高,以此生產的等高線能較好地反映出微地貌特征,但同時也會伴隨產生等高線的抖動和比較多的氣泡,與傳統方式采集的等高線相比,在圓滑度和美觀程度上就處于弱勢。但實際上這正是其對地形的真實反映,是點云數據精度高的體現,所以我們要在一定程度上降低對圓滑度和美觀程度的要求,既要美觀,又要保證精度,這樣才不失使用點云數據的意義。
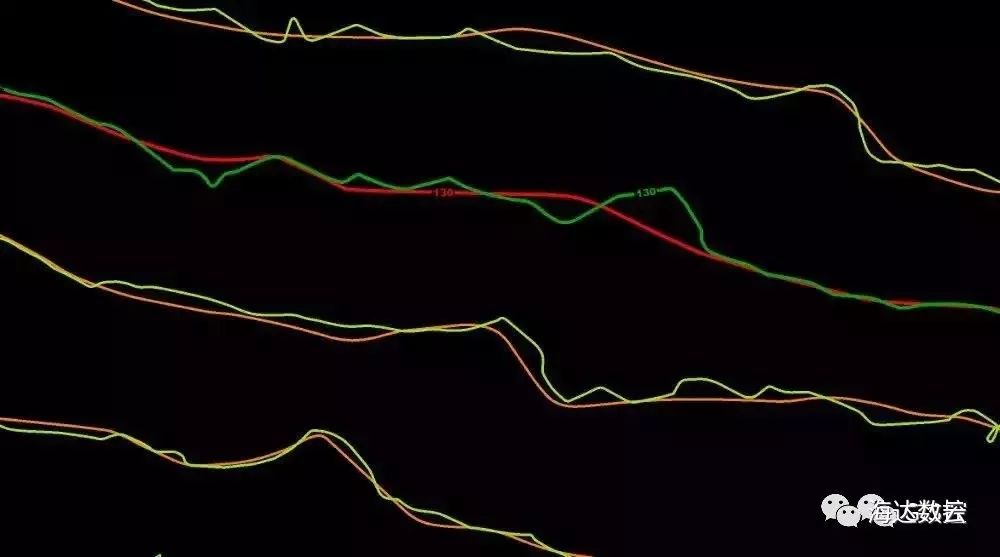
數學與制圖等高線
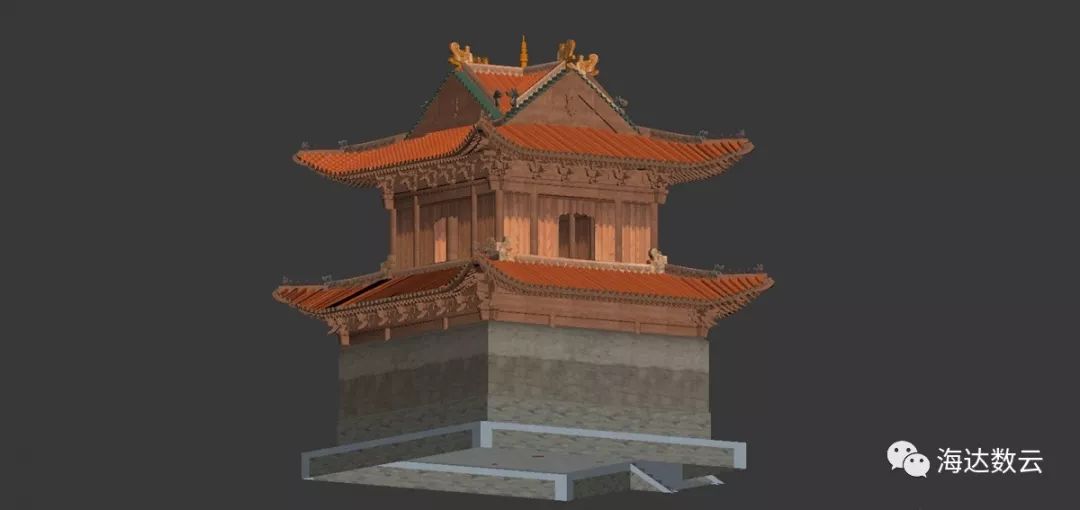
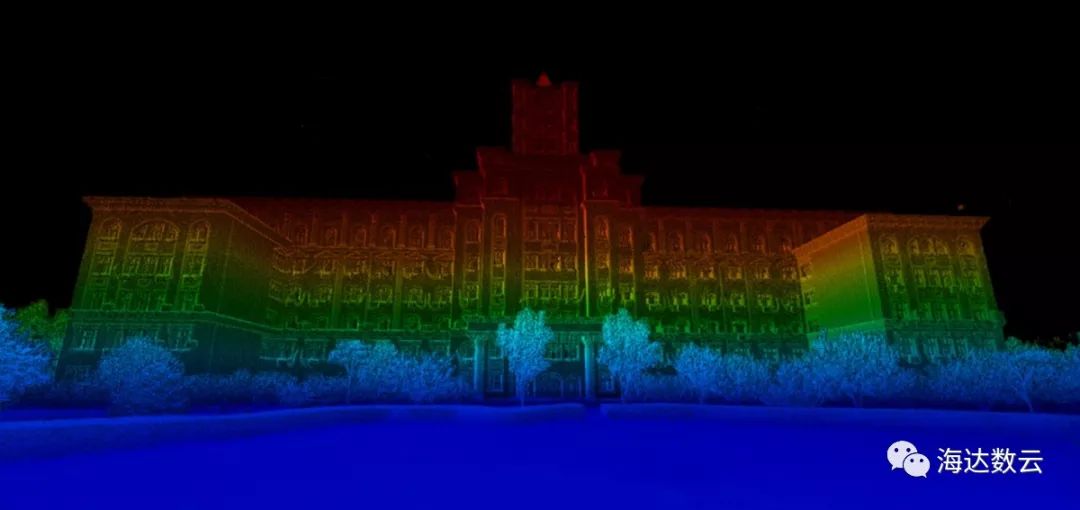
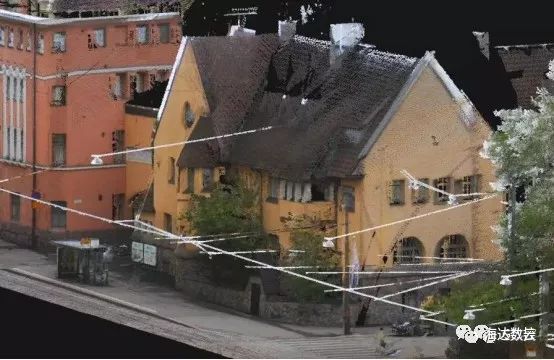
古建筑測量
古建筑測量的特殊性決定其不適用于傳統的測量方式,而三維激光掃描的測量方式可以發揮其獨特的優勢,能在較短的時間內獲取所測古建筑的三維數據,從而為后期修繕保護、模型存檔等工作提供準確的數據支撐。
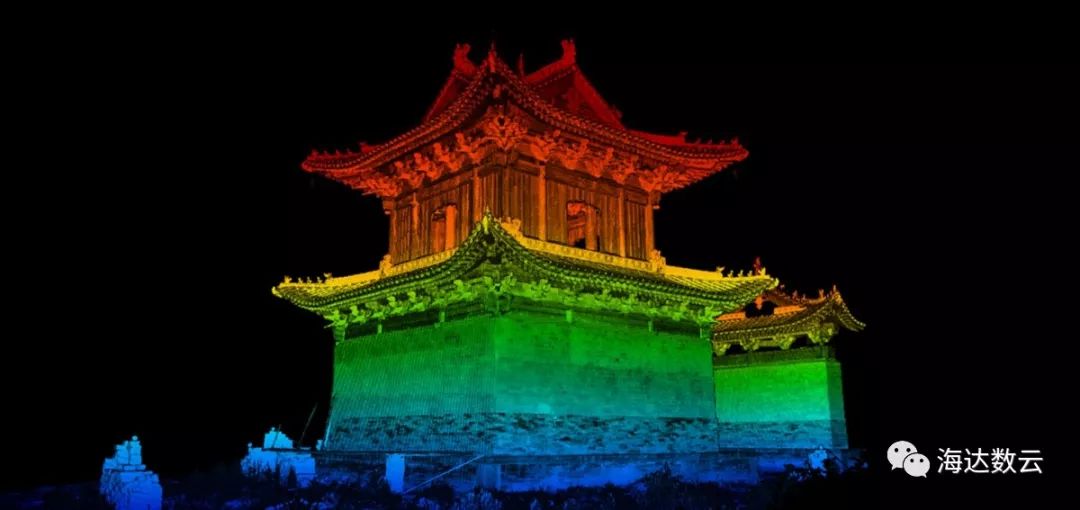
點 云 高 程 渲 染 圖

點 云 強 度 渲 染 圖
體積計算
機載激光雷達系統獲取的高精度激光點云和地形三維模型,可以為勘察設計提供斷面量測、坡度坡向量測、土方填挖量等信息,大大減少工程勘察設計中的外業工作量,縮短工作周期。
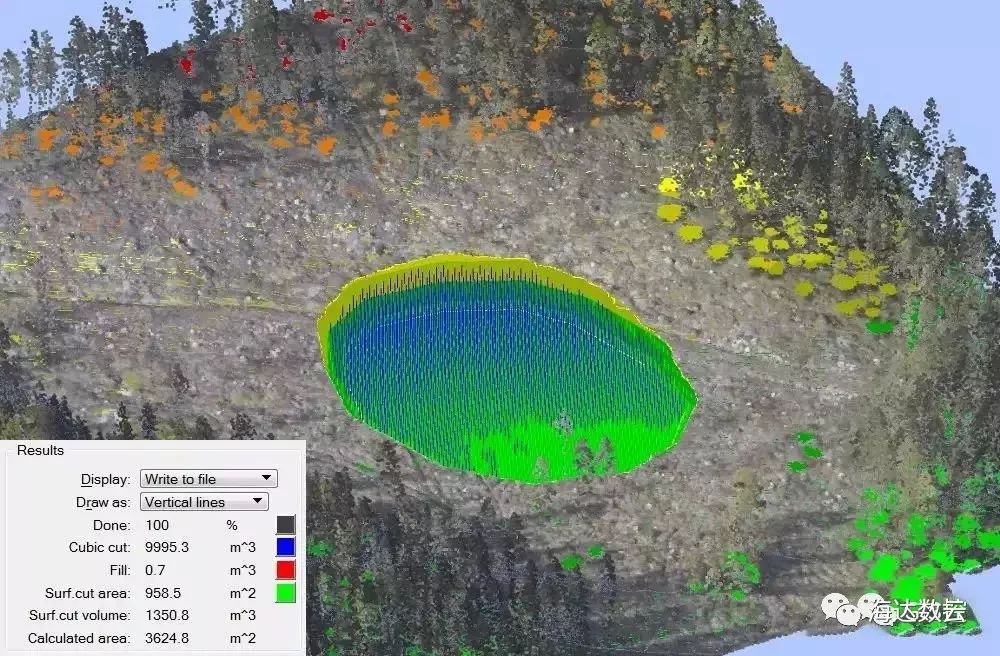
計劃挖掘的數量計算
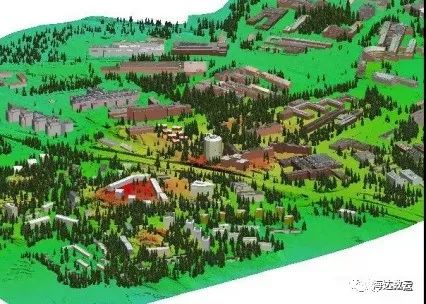
數字化園區
隨著信息化整體加快以及物聯網概念的提出,對園區智能化管理提出了更高要求。作為數字化的前提,精準的三維模型數據尤為重要,而點云處理對于精準空間數據的獲取有著天然的優勢。
點 云 高 程 渲 染 圖

建 筑 三 維 模 型 圖

建 筑 模 型 渲 染 效 果 圖
地形圖測繪
三維激光掃描巨大的優勢在于可以快速掃描被測物體,不需要反射棱鏡即可直接獲得高精度的點云數據,這樣可對真實世界進行快速二維矢量化。目前三維激光掃描技術已廣泛應用于地形測量、防震減災等領域。

點 云 高 程 渲 染 圖
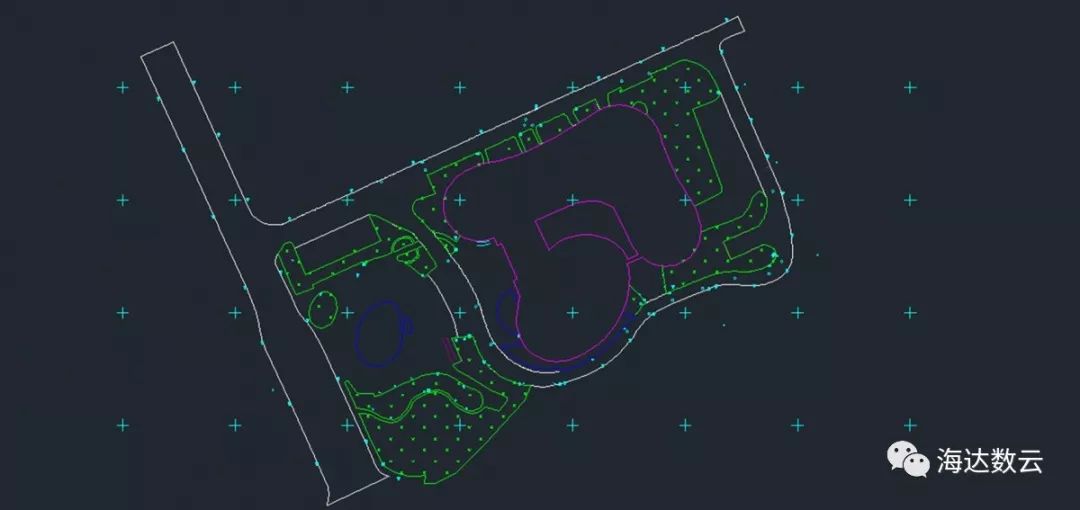
線 劃 圖 成 果
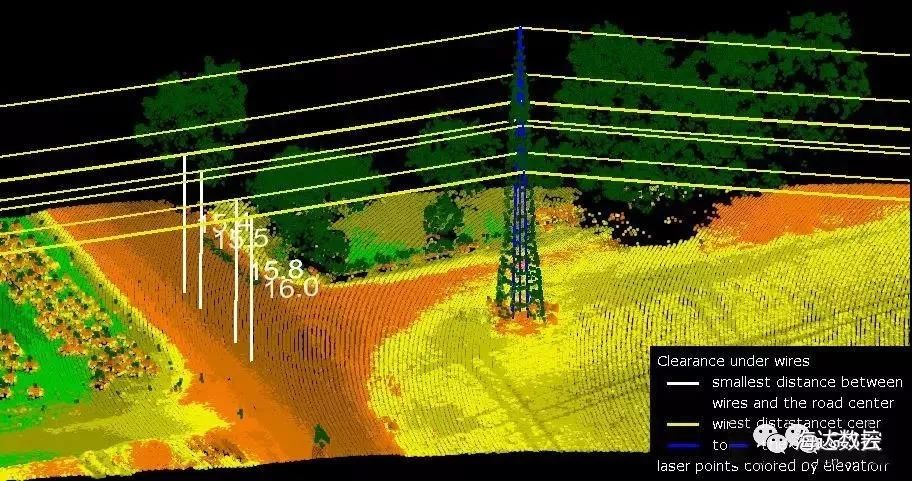
公路和道路測量
安裝在汽車上的移動式LiDAR掃描儀或在直升機上操作的機載掃描儀可以提供密集的點云,可以非常準確地描繪高速公路,以及其周圍環境和路面情況。使用同時拍攝的照片和使用GPS測量的控制點可提高準確度,并有助于補償由高層建筑物和樹木引起的GPS信號間隙。
路面的3D點云和道路環境支持與道路狀況相關的監控任務。這可能包括:
·路面損壞,如車轍,裂縫,坑洼等
·道路橫斷面參數的計算
·表面超高
·路面上的水流
·油漆標記的形狀和狀況
·檢測較長的凹陷
·生成道路設計任務的道路對齊幾何
·與停止和超越距離的規定有關的視線分析
·橋梁,架空電線和隧道下的間隙區域
·沿路危險物體檢測
·檢測道路設施物體,如交通標志,電線桿,公交車站,防撞欄,隔音墻等。

路面損壞
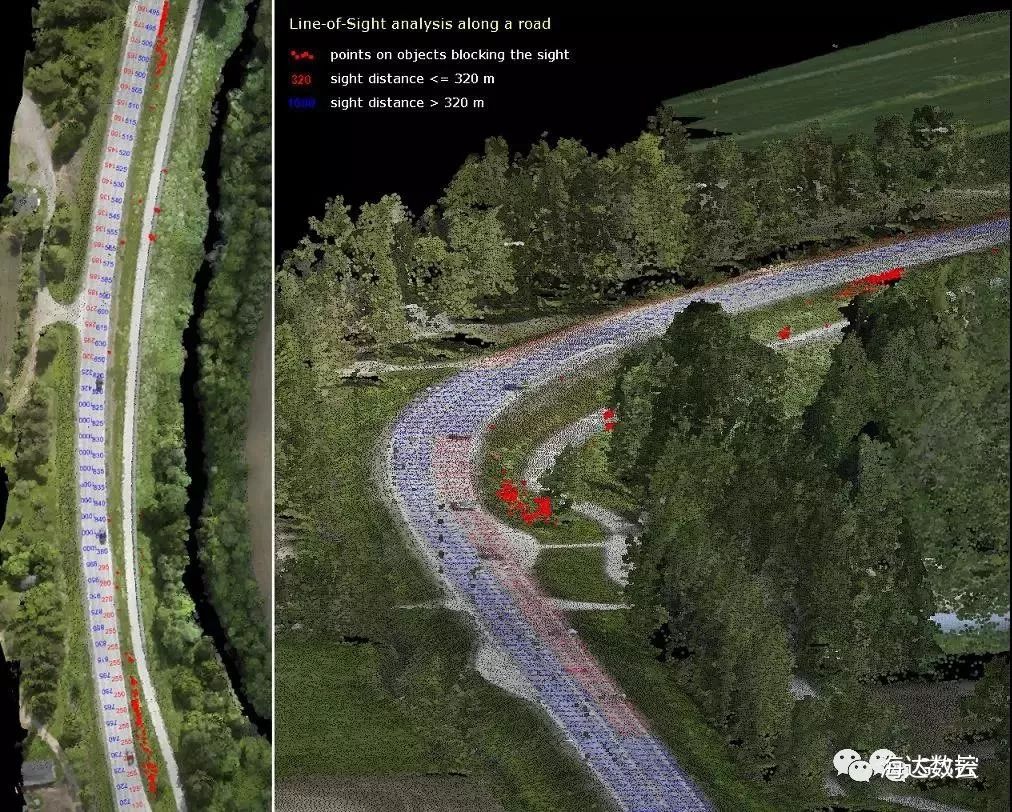
道路視線分析

道路凈空
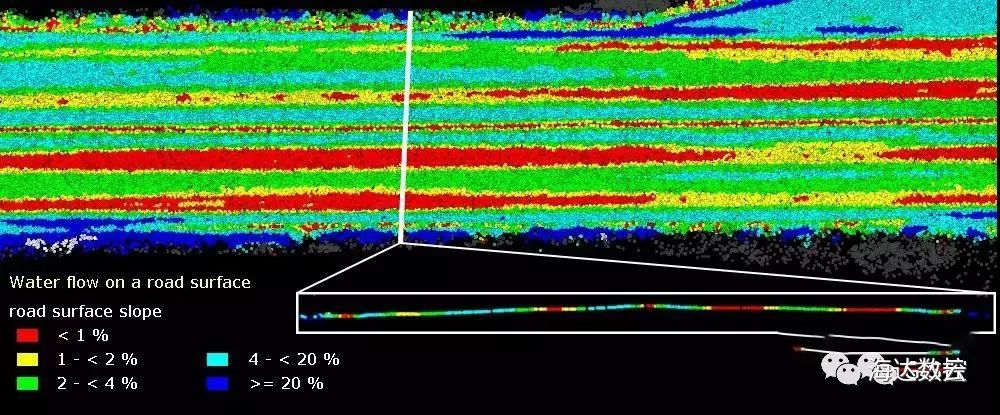
路面水流分析
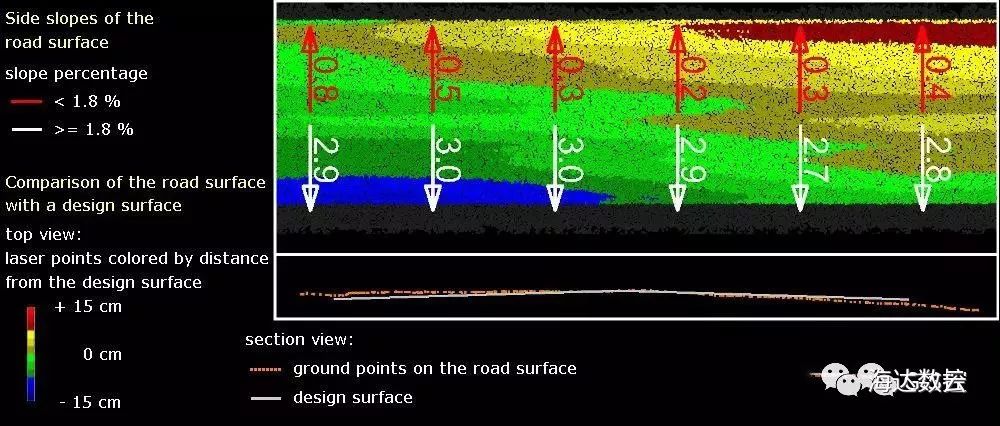
道路邊坡,道路與設計界面
鐵路和電車測量
移動式LiDAR傳感器可以安裝在鐵路發動機、有軌車或有軌電車上的傳感器平臺快速獲取鐵路或有軌電車基礎設施上的地理參考3D空間數據,由此產生的點云滿足高精度要求,并提供軌道,架空電線,平臺,橋梁,隧道屋頂和其他周圍結構的詳細和準確的空間信息。從鐵路環境的點云衍生的信息可以包括:
從鐵路環境的點云衍生的信息可以包括:
·導軌和架空電線的位置
·為設計任務推導鐵路對齊幾何
·視線分析
·在指定的凈空斷面內檢測物體
·沿鐵路發現危險物體
·檢測鐵路附屬設施,如枕木,開關,標志,電線桿,塔架,隔音墻等

電車軌道和電線檢測
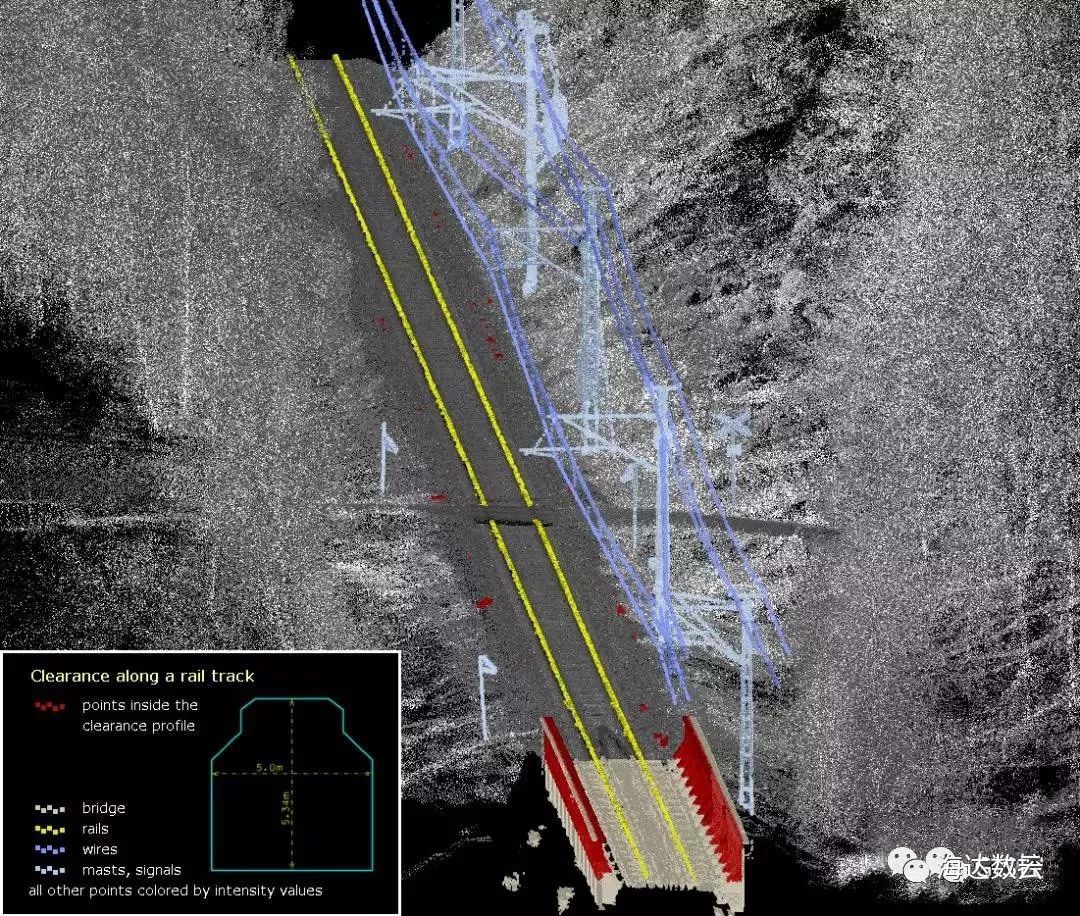
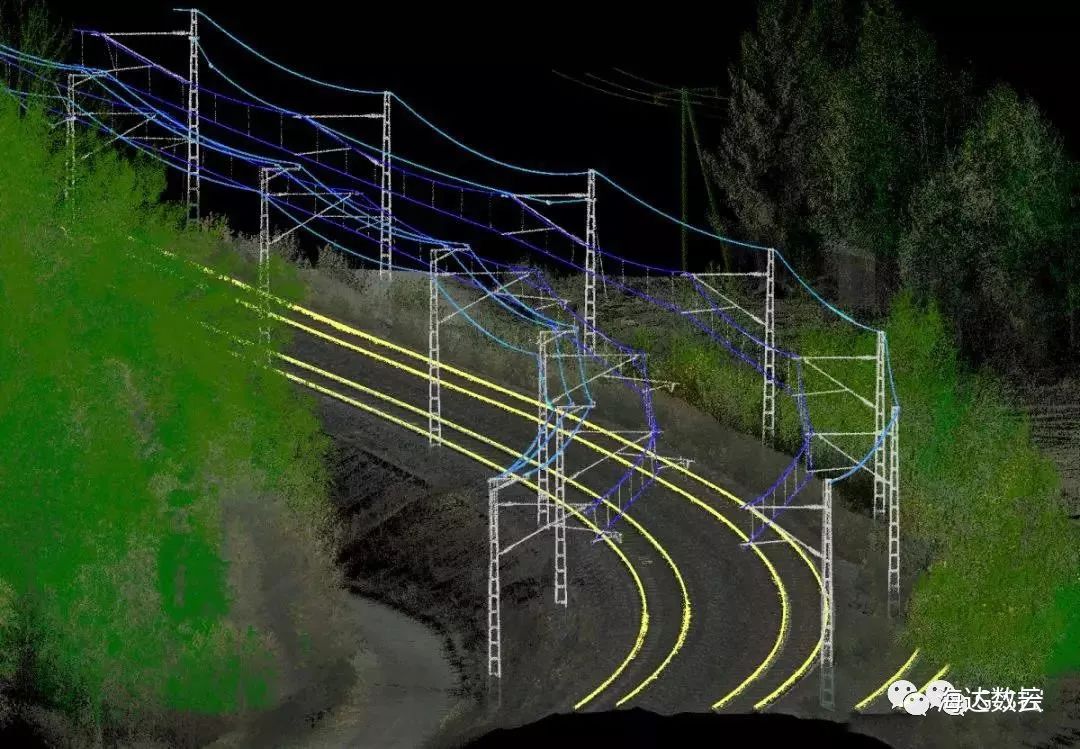
一條鐵路的著色點云
電力線管理(選線、巡線)
電力線走廊通常位于不易進入的區域,因此走廊可能難以勘測。從低空機載平臺操作的LiDAR系統即使在最崎嶇的地形上也可以快速,經濟地進入和測量,并且不會使人處于危險之中。它提供沿電力線走廊的電線,結構,植被和地面的準確位置信息。
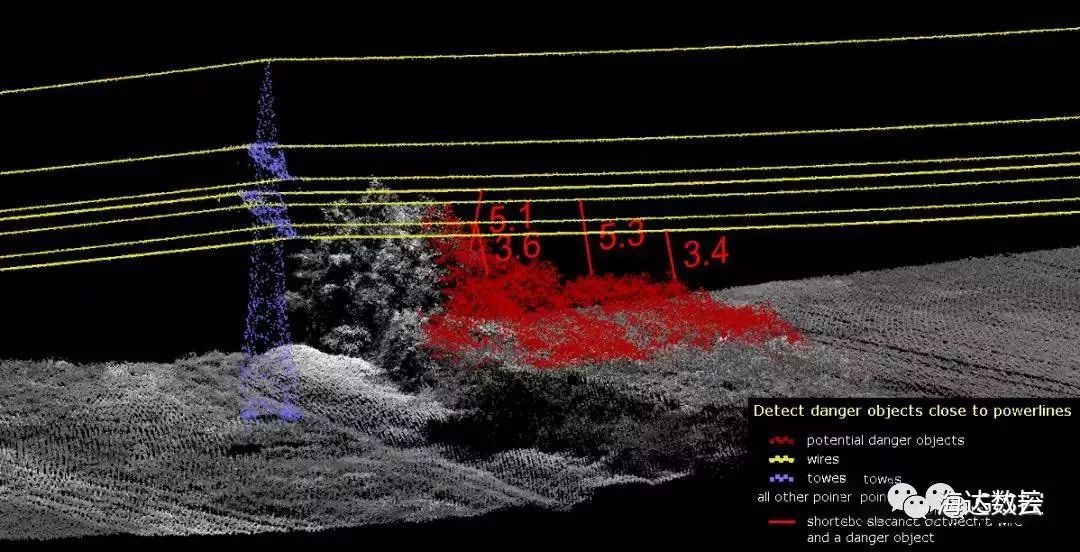
標注危險物體
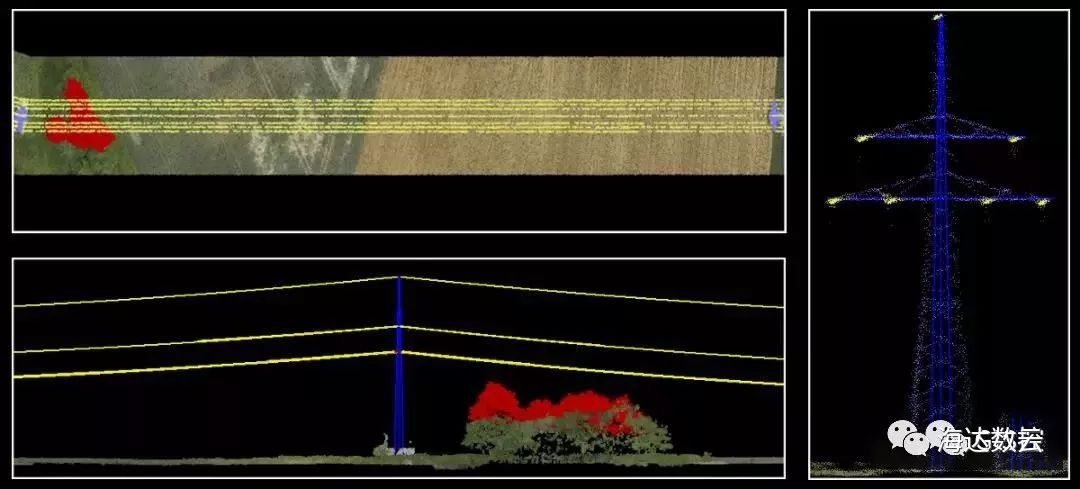
危險物體檢測
電力線與道路凈空
管道走廊規劃與維護
在規劃天然氣和石油管道的路線時,地面的形狀,附近的建筑物和其他結構,人口以及對環境的影響考慮的一些事項。LiDAR提供了一種快速收集信息的方法,用于獲取計劃管道的走廊的完整圖像,以及監測和維護現有管道走廊。
機載激光掃描是一種經濟有效的方法,用于生成管道區域的地理參考3D點云。
隧道掃描
地下條件不是最適合進行測量的:它可能是黑暗,潮濕和多塵。在主動施工期間不能進行測量,但另一方面,工作不能長時間停止進行測量。然而,在構建新的地下空間或維護舊的地下空間時,有許多應用需要準確的隧道精確尺寸信息:必須監測噴涂在巖石表面的水泥表面層的厚度,需要評估結構的不連續性并記錄,巖體和表面分析,變形和滲漏必須密切關注,并且需要監測施工質量。
地面靜態或移動激光掃描為這些任務提供最快,最安全和最準確的數據收集方式。LiDAR不需要外部光線,設備足夠堅固,可以應對地下條件。靜態掃描儀是便攜式的,移動掃描儀可以安裝在汽車或火車或其他車輛上。它們可以高速生成密集的3D點云。即使在相當長的GPS停機期間,現代定位系統也能提供準確可靠的定位。可以使用移動掃描儀對鐵路或高速公路隧道進行測量,而不會中斷交通流量或在交通中間將人員置于危險之中。
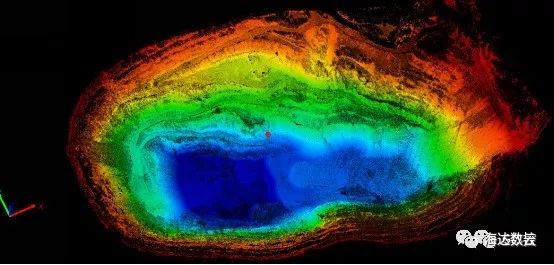
礦山測量
由于礦山地形復雜,采用全站儀和GPS等傳統的測量手段進行高精度測繪工作往往費時費力。特別隨著數字礦山概念的提出,礦山管理對空間三維信息的需求也顯得更加迫切,三維可視化的管理模式已經成為數字礦山的主要內容之一,而目前常規的測量方式所獲取的數據很難滿足三維數字礦山的需要。近年來快速發展的三維激光掃描技術為解決復雜的礦山地形測量和數字礦山建設提供了新的技術手段。三維激光掃描技術具有高分辨率、高采樣率以及非接觸測量的優勢,非常適合用于獲取礦山的復雜表面和高危區域的空間三維信息。
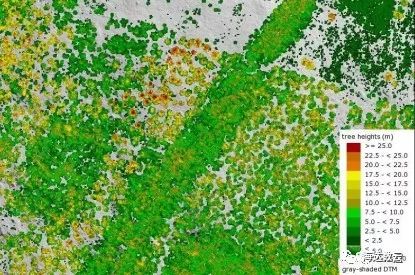
森林調查
森林的機載LiDAR點云可用于估計森林的特征,例如樹木的平均高度,樹冠密度,生物量,林分體積和植被覆蓋度。采用具有較小的激光束的掃描系統和完整的波形功能,以及可能用于生成支持數據的附加傳感器(例如真彩色或紅外圖像),可以確定更多的信息,如高度,樹冠直徑,和物種。
衍生數據可用于監測森林生長,風暴或火災造成的損害,樹木采伐以及估計采伐時樹木的財務價值。具體信息支持森林管理,以提高木材質量,減少浪費,增加利潤和保持環境質量。有關森林樹冠密度和生物量的信息進一步有助于估算森林火災蔓延,從而支持消防員的工作和疏散任務。

立面測量
在建筑物立面測量領域,克服了傳統建筑立面測量的局限性,通過面掃描方式快速獲取詳細的立面數據,使立面測量更為直觀和高效。
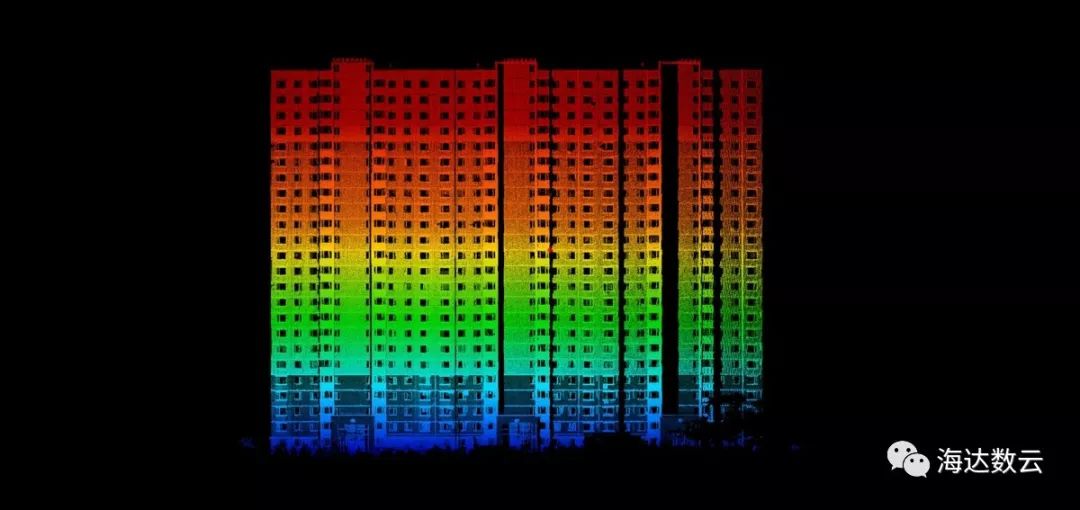
點 云 高 程 渲 染 圖

點 云 強 度 渲 染 圖
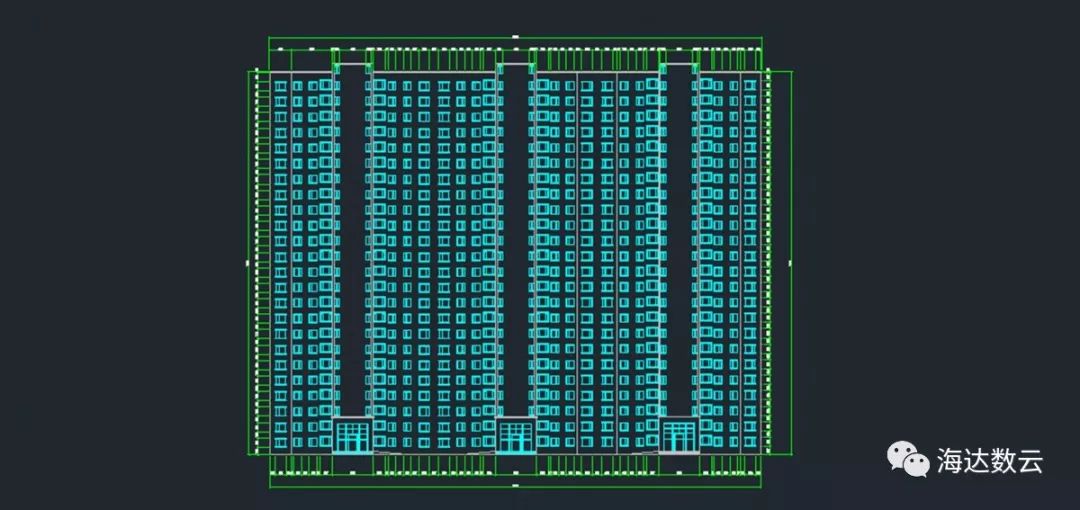
立 面 成 果 圖
3D城市模型
3D城市模型有許多應用:城市規劃,建筑,市政資產管理,安全和防御,緊急疏散計劃,事故和災難風險評估,定位服務,信息服務,虛擬現實,商業視覺效果和廣告,電信,可視化,飛越動畫,等等。

噪聲傳播分析
環境噪聲是影響一個地區所有居民的一種污染形式。最關鍵的是機場,鐵路,高速公路,主要道路交叉口,工業區,海港和類似地點。2002年,歐盟建立了環境噪聲法案,以確定噪聲污染水平并采取措施降低噪音。實施噪聲法案的一個步驟是創建和發布噪聲地圖。計算噪聲的傳播并因此確定特定區域中的噪聲水平的擴展需要數字地形模型(DTM)以及影響噪聲傳播的對象模型。
機載激光掃描是收集大面積3D數據的最快且最具成本效益的方法。激光掃描創建一個點云,描繪地面及其上的所有物體。
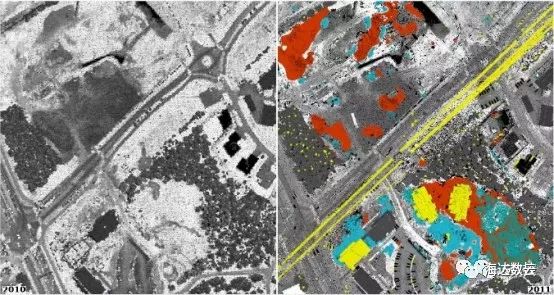
地質災害應急與評估
LiDAR適用于測量多種物體,同樣適用于檢測自然或人為變化。將在不同時間點掃描的點云相互比較以發現它們之間的顯著差異。
機載激光掃描是最快且可能是唯一的測量方法,能夠收集遭受自然災害或其他災害的區域的3D數據,從而為事故發生后不久的損傷分析提供依據。
道路建模
城市道路作為連接城市不同功能區的空間紐帶以及城市空間信息流的主要載體,其三維模型是數字城市不可或缺的重要組成部分。道路三維模型一般是由路面模型及其附屬構造物組成,而三維激光掃描技術能快速獲取詳細道路面高精度點云數據,并以此為依據構建出更精細的道路模型。
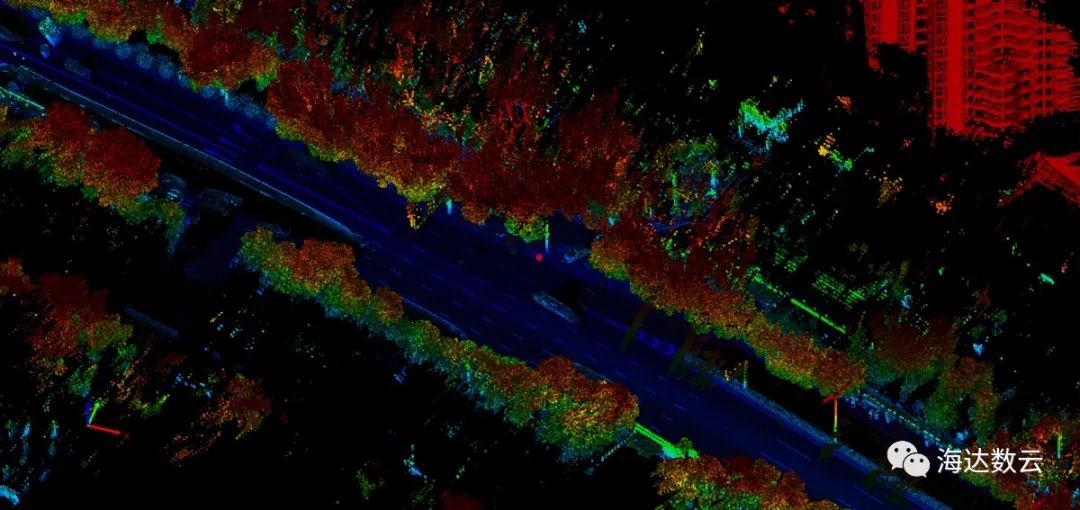
點 云 高 程 渲 染 圖
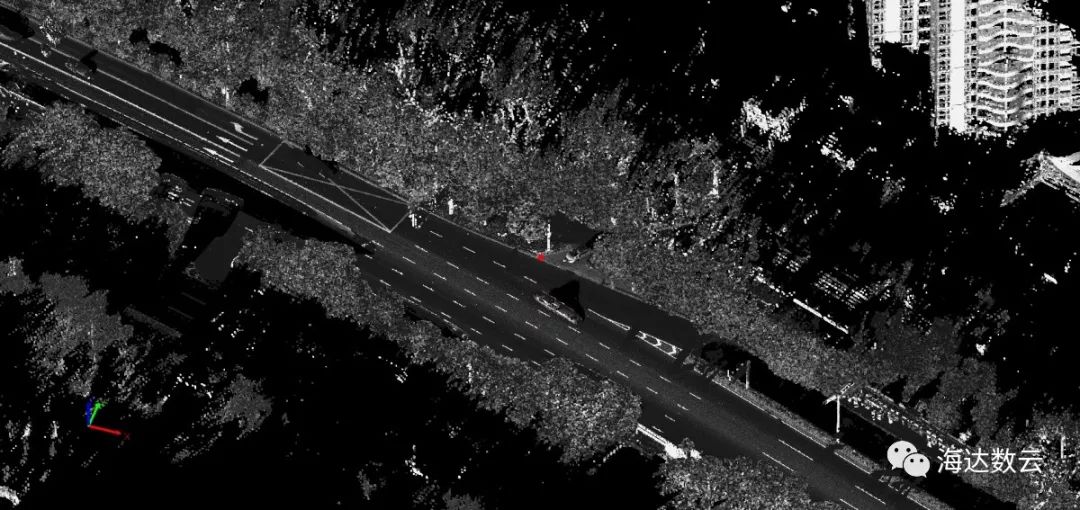
點 云 強 度 渲 染 圖

道 路 三 維 模 型 圖
洪水分析
新的歐盟洪水指令要求在2015年之前,如果海平面上升,河流泛濫或大雨暴雨,所有成員國都要繪制有洪水風險的區域。該指令指示各國制定洪水風險圖并采取適當措施降低人身安全、環境、基礎設施和財產遭受洪水破壞的風險。這需要這些區域的準確的高程模型,以確定在不同水位哪些區域容易發生洪水。機載激光雷達是從大區域捕獲數據并生成精確地形模型的方法。安裝在船上的移動掃描系統也已經過測試,用于掃描河岸和附近區域。
數字工廠
在工廠數字化的過程中要對工廠進行模型數字化,傳統測量方法在測量結構復雜的工廠時,會產生巨大的工作量,在測量過程中會遺漏諸多細節。點云技術能夠高精度、大范圍的對工廠進行掃描,在短時間內獲得廠房的三維點云及圖像,并在三維點云基礎上建模。大大降低了建模的難度,加快了建模的速度,能夠1:1精確還原真實工廠。
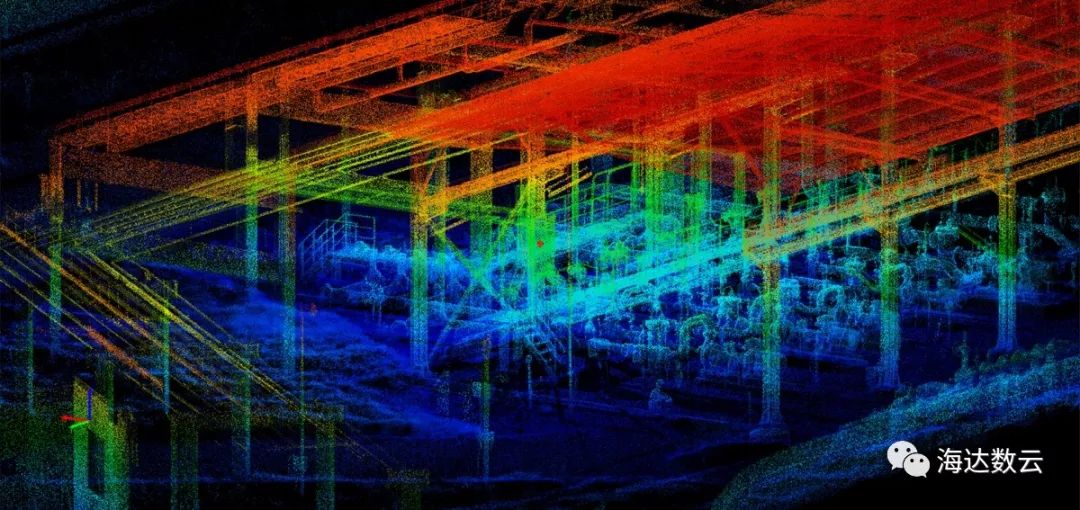
點 云 高 程 渲 染 圖
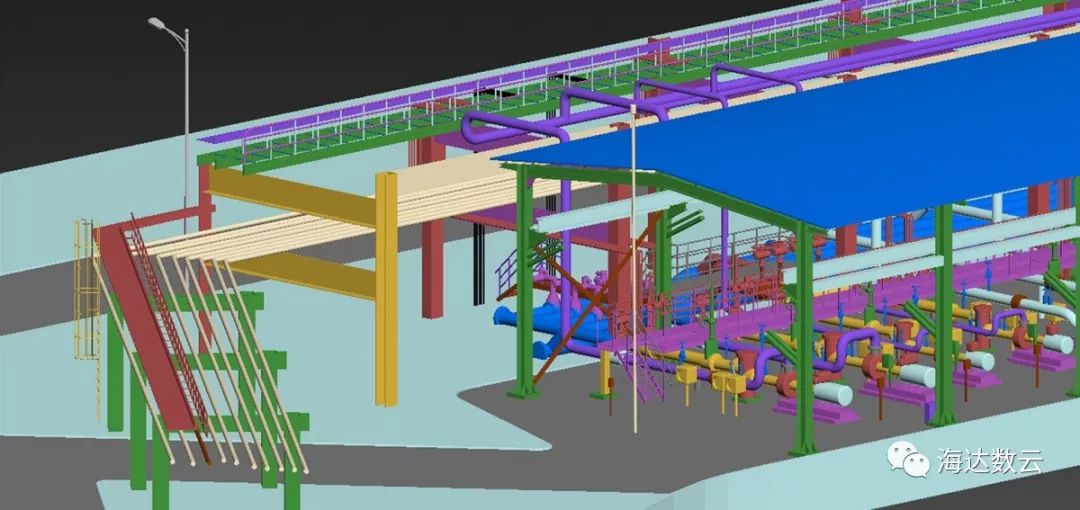
工 廠 三 維 模 型 圖
審核編輯 :李倩
-
數據處理
+關注
關注
0文章
624瀏覽量
28929 -
PCL
+關注
關注
1文章
35瀏覽量
13830 -
點云
+關注
關注
0文章
58瀏覽量
3902
原文標題:【光電智造】十大點云數據處理技術梳理
文章出處:【微信號:今日光電,微信公眾號:今日光電】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
邊緣計算+無點表=?深控技術工業數采網關的本地化數據處理邏輯
DLP6500獲得的點云數目不多是什么原因造成的?
基于深度學習的三維點云分類方法

什么是三維點云分割
云計算與邊緣計算的結合
輸電線路激光雷達點云監測裝置的功能特點和技術參數介紹
激光雷達點云數據包含哪些信息
LiDAR激光點云數據處理軟件處理流程
中國信通院發布“2024云計算十大關鍵詞”

友思特案例 | 自研創新!三維工件尺寸測量及點云處理解決方案

泰來三維|三維掃描服務_三維激光掃描儀測量山體滑坡點云建模





 工商網監
工商網監

評論